軌道交通車輛永磁同步牽引系統斷電區穿越控制策略
2021-08-29 09:50:18張偉偉劉計龍麥志勤林克文
電工技術學報 2021年16期
關鍵詞:系統
張偉偉 肖 飛 劉計龍 麥志勤 林克文
軌道交通車輛永磁同步牽引系統斷電區穿越控制策略
張偉偉 肖 飛 劉計龍 麥志勤 林克文
(海軍工程大學艦船綜合電力技術國防科技重點實驗室 武漢 430033)
永磁同步牽引傳動系統是軌道交通車輛穩定運行的重要組成部分,由于車輛經過斷電區時,供電系統會出現短暫失電而引起母線電壓突變,對牽引系統造成電流沖擊以及LC振蕩,甚至觸發系統發生重大故障,影響系統運行。為使車輛能夠平穩穿越斷電區,該文通過建立軌道車輛永磁同步牽引系統穿越斷電區的等效電路,推導出系統進入斷電區前后的數學模型,并在此基礎上提出一種通過整流發電穩定母線電壓穿越斷電區的控制策略,避免關閉牽引系統和斷開主接觸器,同時降低駛離斷電區時母線電壓突變,從而減小牽引系統的沖擊及振蕩。仿真和試驗結果驗證了所提控制策略的有效性和可行性。
軌道交通車輛 永磁同步電機 牽引控制系統 斷電區 整流發電
0 引言
軌道交通車輛永磁同步牽引傳動系統由接觸軌受電模塊、直流充電濾波模塊、牽引變流器、永磁同步牽引電機等組成,集電靴從接觸軌取電后經濾波器和牽引變流器驅動永磁同步電機(Permanent Magnet Synchronous Motor, PMSM),為車輛的運行提供動力[1]。鑒于目前供電系統的設計,車輛運行線路中,接觸軌供電存在失電區域,即供電電壓突然中斷,一段時間后又恢復供電的區間,通常稱之為斷電區[2]。牽引系統在實際運行過程中,供電電壓直接影響母線電壓,而母線電壓突變容易引起電流沖擊以及低頻振蕩,甚至可能觸發系統重故障,造成停機[3]。為確保牽引系統順利穿越斷電區,國內外學者展開很多研究,提出相關的解決措施,并且取得一定效果。
文獻[4]以上海浦東國際機場旅客捷運系統為例,對受電車輛在穿越斷電區時產生過電流的原因進行分析,并結合線路實際工況提出了車輛穿越斷電區的解決方法,但是未能從理論上解決斷電區電壓突變對車輛牽引系統的沖擊問題,所提方法不具有普適性。文獻[5]以高速牽引列車為研究對象,建立了考慮濾波電感在內的牽引供電系統模型,分析了濾波電感對于降低電流沖擊的作用,然而并沒能提出解決斷電區穿越引起巨大沖擊和LC振蕩的有效方法。文獻[6]以電動車輛永磁同步牽引系統為例,對母線電壓波動造成的影響進行分析,并從控制算法上提出了優化措施,雖然能夠降低母線電壓波動對系統的沖擊,但是車輛進入斷電區時仍然需要關閉牽引系統,待通過斷電區后再重啟系統,對操作人員的依賴程度較高。文獻[7]對電力機車中直流母線電壓與電力電子變壓器進行建模,通過仿真分析了大信號擾動對直流母線電壓的影響,提出了電壓前饋補償策略調節母線電壓,并為母線電壓控制器的設計提供了準則,不足之處在于只進行了仿真分析,沒有通過試驗進行具體驗證。
為更好地解決軌道交通車輛永磁同步牽引系統斷電區穿越問題,本文以北京地鐵某線路為例,介紹永磁同步牽引系統結構,分析斷電區問題的產生原因及影響,并在此基礎上提出了基于整流發電穩定母線電壓使牽引系統穿越斷電區的控制策略,從而使車輛在不關閉牽引系統的情況下平穩通過斷電區,避免了車輛通過斷電區時因母線電壓突變引起的系統沖擊和振蕩,最后利用仿真和試驗對控制策略進行了驗證。
1 地鐵永磁同步牽引系統
在常見的地鐵牽引系統中,接觸軌供電、集電靴采電的方式得到越來越多的應用,集電靴采電后經過充電濾波電路向牽引變流器提供1 500V或750V直流電,而后牽引控制系統根據當前的牽引指令生成目標轉矩,并控制三相牽引變流器的開通與關斷,從而驅動永磁同步電機運行。所選線路地鐵車輛每套變頻器有4組逆變模塊,驅動4臺電機,在結構和控制策略上各模塊完全一致,為簡化分析,以一組逆變模塊驅動一臺電機進行研究,地鐵永磁同步牽引系統的結構框圖如圖1所示。
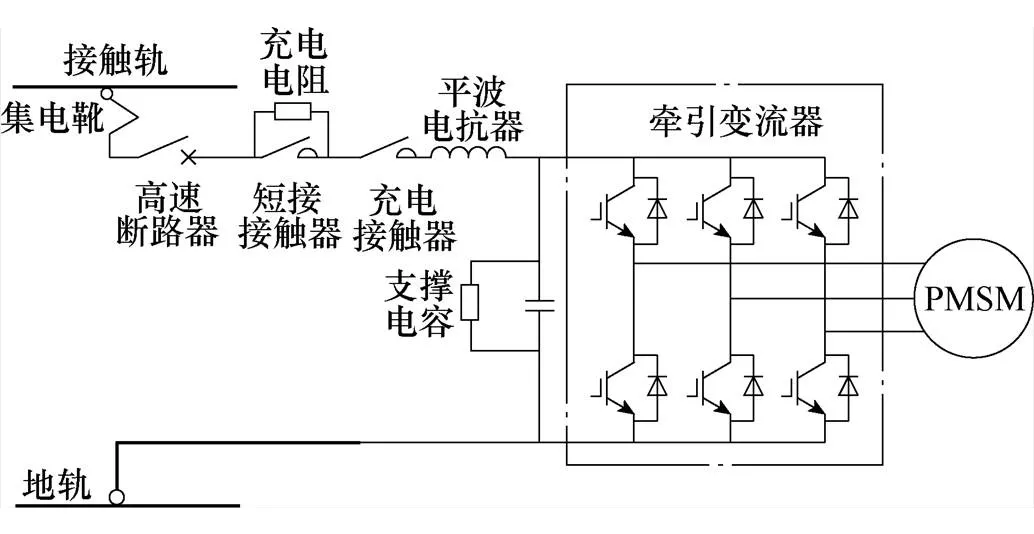
圖1 地鐵永磁同步牽引系統結構框圖
從圖1可以發現,接觸軌提供的供電電壓經過充電濾波電路向支撐電容充電,而后通過牽引變流器向永磁同步電機提供電能。高速斷路器在沒有重大故障的前提下一直保持閉合,閉合充電接觸器后向支撐電容充電,當充電至80%以上時,閉合短接接觸器,充電電阻被旁路后允許系統運行,所以供電電壓的變化會直接影響轉矩指令的生成,進而影響系統運行。由于接觸軌布置存在斷電區域,車輛進入該區域,供電電壓會突降為零,車輛離開該區域后,供電電壓瞬時恢復。因此,地鐵車輛在穿越斷電區時,供電電壓會急劇跳變,需要對車輛穿越斷電區的工況進行分析,設計相應的控制策略,使其穩定穿越斷電區。以所選地鐵線路為例,永磁同步牽引系統參數見表1。
2 牽引系統斷電區穿越分析
2.1 斷電區的形成
為更好地了解斷電區特性,設計牽引系統斷電區穿越策略,首先對斷電區形成的原因進行分析。地鐵車輛在實際線路運行中,供電電壓由接觸軌提供,而接觸軌的鋪設并不連續,通常設有分段,段與段之間存在間隔,集電靴在間隔區域不能受電,從而導致車輛進入該區域后供電中斷[8]。接觸軌分段形成斷電區示意圖如圖2所示。
表1 地鐵永磁同步牽引系統參數
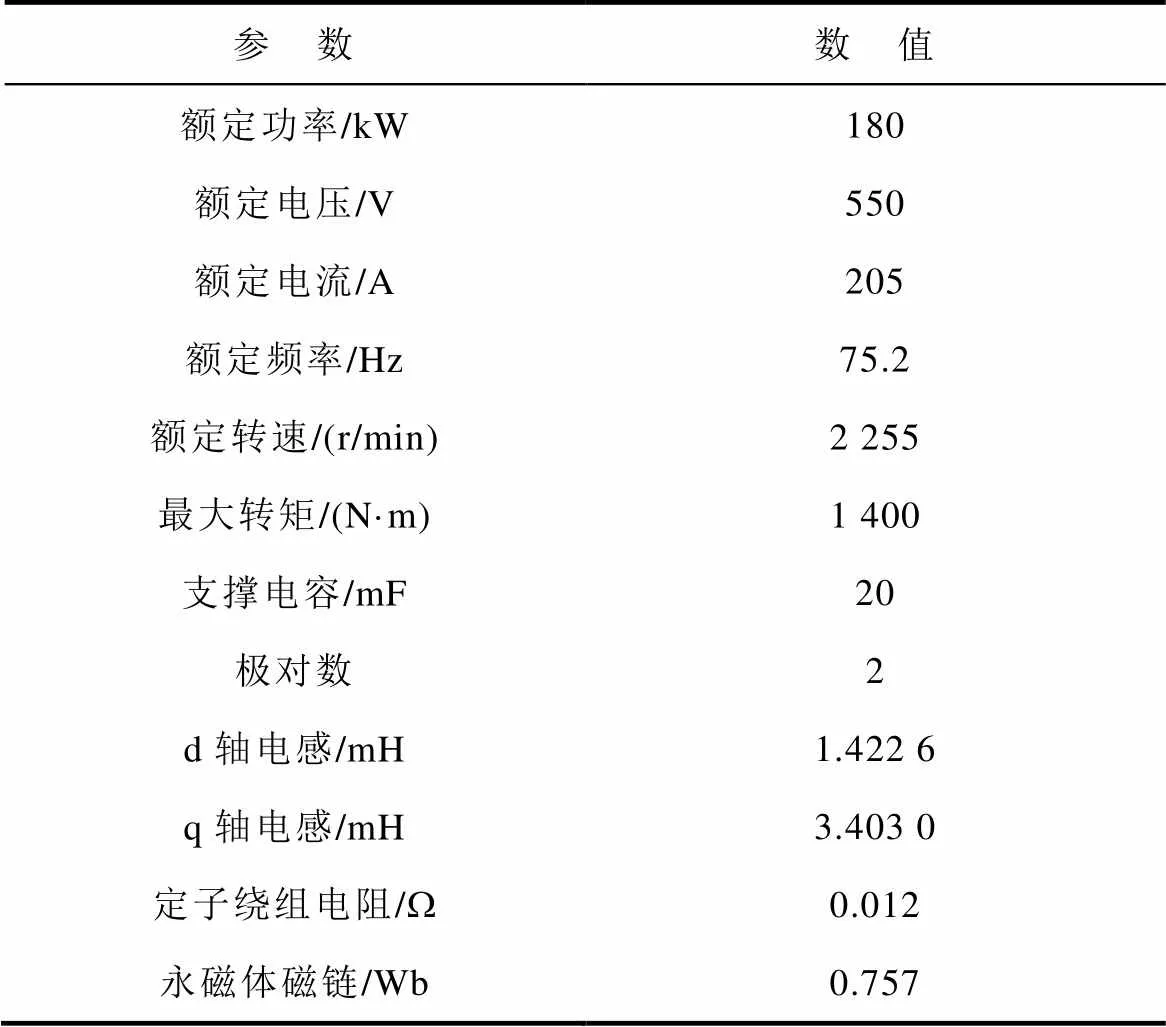
Tab.1 The parameters of metro PMSM traction system
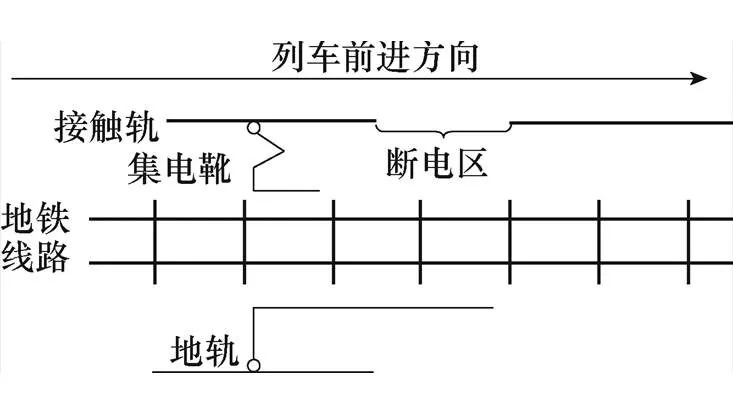
圖2 斷電區示意圖
實際線路中斷電區的設置主要有兩種類型:第一種類型是電分段,由于地鐵線路跨越距離遠,通常由多個變電所進行分區段供電,此外,為提高繼電保護可靠性,縮小故障影響范圍,車輛從運行線路回到車輛段時也存在供電區間切換問題,接觸軌從一個變電所的供電區間跨越到另一個變電所的供電區間時,不同供電區間銜接處設有電分段;第二種類型是物理分段,在地鐵線路接觸軌鋪設過程中,考慮到道岔區、人防工程等因素的影響,接觸軌可能無法連續布置,也會存在不同長度的中斷,形成物理分段[9]。因此,地鐵永磁同步牽引系統在實際線路運行過程中,必然會經過斷電區,造成直流側突然失去供電,駛離斷電區后又恢復供電。
2.2 斷電區穿越工況
為便于對地鐵車輛穿越斷電區的具體工況進行分析,建立永磁同步牽引系統斷電區穿越等效模型如圖3所示。
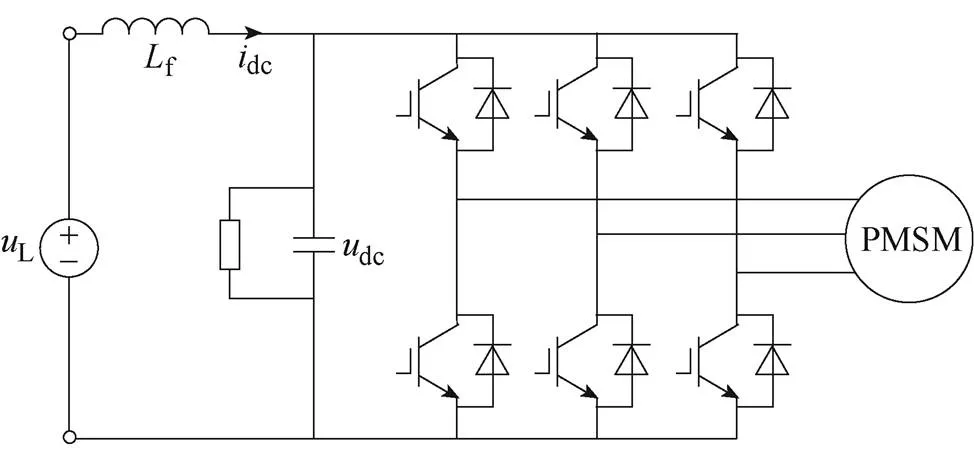
圖3 牽引系統斷電區穿越等效模型
圖3中,L為母線電壓,即由接觸軌供電在牽引系統直流側形成的電壓,當集電靴受電時,母線電壓由供電電壓決定,集電靴不受電時,母線電壓由電容電壓決定;dc為直流母線電流;dc為支撐電容電壓;f為布置在牽引變流器和直流供電網之間的濾波電感,母線電壓經過濾波電感向支撐電容充電,該電感對于降低直流側電壓波動以及電流沖擊對牽引變流器的影響具有重要作用,同時對于牽引系統具備斷電區穿越能力也極為關鍵。
當地鐵車輛進入斷電區后,由于供電線路失電,母線電壓L會瞬時突降為0,而支撐電容電壓dc在極短的時間內的變化相對較慢。根據所選線路器件選型情況,直流支撐電容容值為20mF,該支撐電容在無供電電壓的情況下僅支持牽引系統滿功率繼續運行約10ms。車輛進入斷電區后,如果繼續按照原牽引指令運行,在10ms左右支撐電容就會完全失電,而實際線路中車輛通過斷電區的時間約為0.5~1s,所以,在供電丟失的情況下,單純依靠支撐電容儲備的電能不足以支持車輛穿越斷電區。待車輛駛離斷電區,集電靴再次和接觸軌連接恢復供電,母線電壓從0V突增至750V,必然會對系統造成很大的電流沖擊以及LC低頻振蕩[10-11]。牽引系統在支撐電容失電情況下恢復供電沖擊等效電路如圖4所示,該沖擊電流可能損壞直流支撐電容,甚至觸發高速斷路器動作,進而引起系統重故障,造成系統停機。此外,地鐵車輛在穿越斷電區時,由于供電電壓突變還可能引起燃弧、集電靴熔斷器損壞、接觸軌防護罩移位、牽引制動異常等一系列故障[12]。
按照表1中地鐵永磁同步牽引系統參數,進行電容失電情況下供電電壓恢復的仿真分析,牽引系統直流側仿真波形如圖5所示。可以看出,母線電壓由0V突增至850V時,瞬間沖擊電流達到400A,同時直流側電壓電流產生LC振蕩,降低了平波電抗器和支撐電容的壽命。
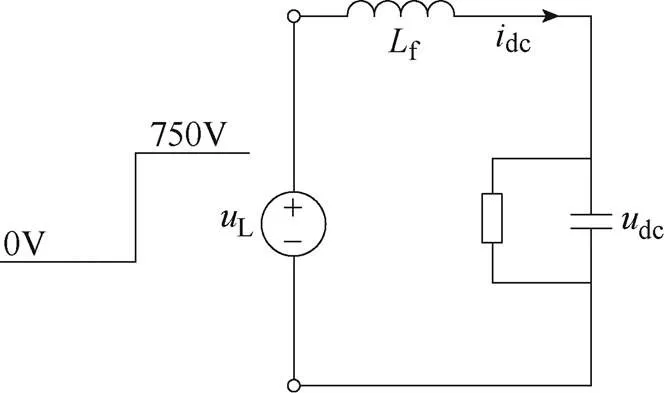
圖4 電容失電情況下恢復供電沖擊等效電路
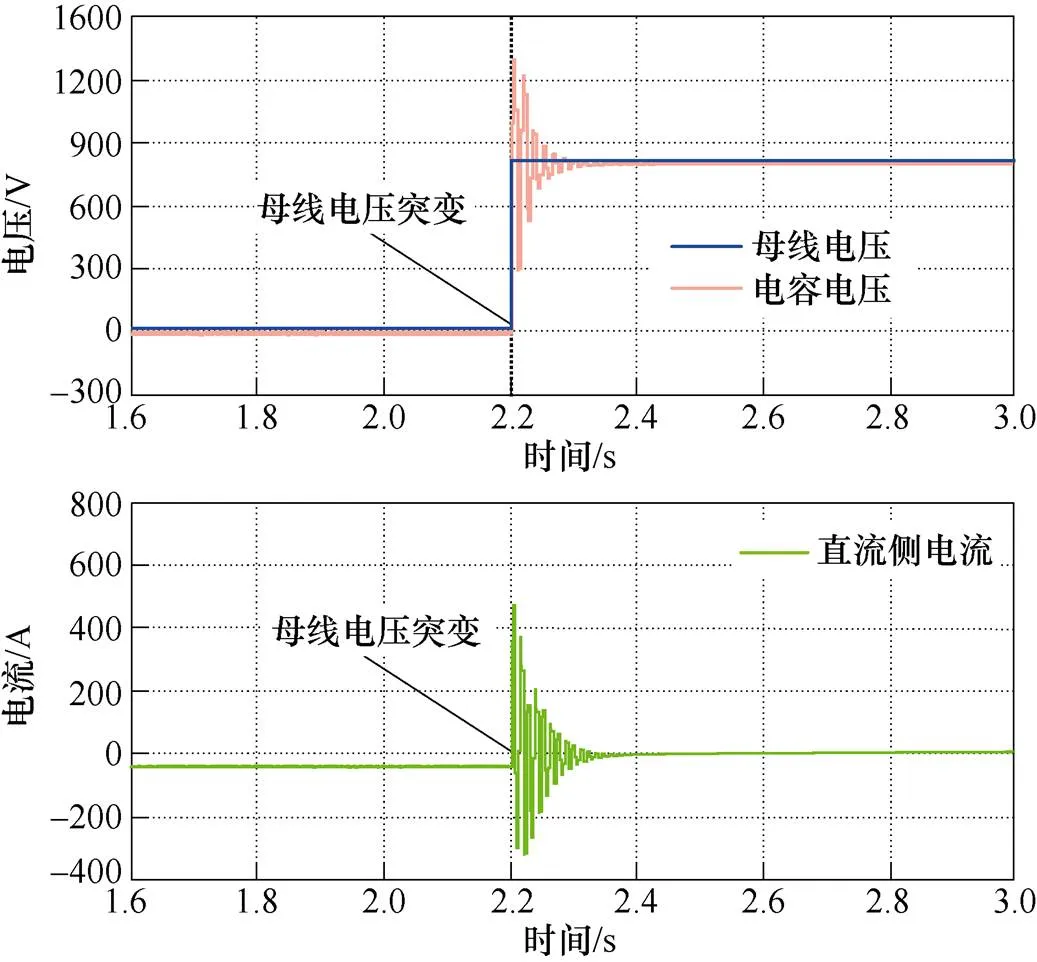
圖5 母線電壓由0V突增至850V直流側仿真波形
當前地鐵線路采取的斷電區穿越控制策略主要可分為兩大類:
第一大類,車輛以牽引系統關閉并且主接觸器(包含圖1中充電接觸器和短接接觸器)分閘狀態通過斷電區,其中,主接觸器分閘又可分為主動分閘和故障分閘兩小類:①主動分閘,即在車輛進入斷電區之前主動將接觸器分閘(如引言中提到的依靠司機操作);②故障分閘,即系統進入斷電區,檢測到母線電壓過低,判定為欠電壓故障后主接觸器自動分閘。無論是主動分閘還是故障分閘,牽引系統的主接觸器以分閘狀態通過斷電區后,需要按照正常啟動流程執行充電接觸器合閘、電容電壓充電至母線電壓的80%以上、短接接觸器合閘這三步操作(電容電壓充電的三步常規流程),然后牽引系統再恢復運行。
第二大類,即車輛通過斷電區時主接觸器一直保持合閘狀態,由于過斷電區之前不用分閘,過斷電區之后也不用執行電容電壓充電的三步流程。采用該類策略時,進入斷電區后,需要將牽引系統的輸出轉矩迅速降到0,以避免支撐電容上的電能被迅速消耗掉。
對于第一大類斷電區穿越控制策略,由于接觸器需要分閘,機械開關動作會降低元器件使用壽命。對于異步電機牽引系統,這種操作方式尚可接受;而對于永磁同步牽引系統,直流側主接觸器斷開、變頻器停機后,永磁同步牽引系統可能工作在不控整流狀態,使支撐電容電壓迅速抬高,對系統正常工作產生不利影響。
對于第二大類斷電區穿越控制策略,需要通過控制電機的電流使其輸出的轉矩為零,由于母線已經和支撐電容斷開且支撐電容的電壓處于不控狀態(或者叫開環狀態),所以僅僅控制電機輸出轉矩為零(需要考慮對轉矩的控制精度),轉矩控制精度可能引起電容電壓波動,無法保證電容電壓一直保持在750V附近。駛離斷電區供電電壓恢復時,最惡劣的情況下支撐電容上的電能耗盡,母線電壓從0V突增至750V附近,會對系統產生劇烈沖擊。
3 基于穩壓穿越的斷電區控制策略
3.1 穩壓控制器設計
為了減小地鐵車輛穿越斷電區時母線電壓突變引起的系統沖擊,降低對司機的依賴程度,避免關閉牽引系統斷開接觸器,本文提出一種利用整流發電穩定母線電壓穿越斷電區的控制策略。牽引系統檢測到車輛進入斷電區,系統不再執行司控室發來的轉矩指令(實際運行中由于供電電壓跌落,系統也無法繼續執行原指令),利用車輛的超大慣性使永磁同步牽引系統進入整流發電狀態,將直流母線電壓穩定在供電電壓附近,從而在供電電壓恢復時可以大大降低電壓突變引起的沖擊。車輛駛離斷電區后,牽引系統退出整流發電狀態,恢復至正常牽引狀態,重新執行司控室發來的轉矩指令。
根據第2.2節的分析,車輛經過斷電區時,母線電壓L會瞬間跌落,而電容電壓dc變化相對較慢,因此,可以根據母線電壓的變化情況判斷地鐵車輛是否進入了斷電區[13]。牽引系統正常運行時母線電壓額定值為750V,由于供電線路電壓存在波動,允許母線電壓變化范圍為500~900V,因此,設置母線電壓低于450V作為進入斷電區的判斷條件。
車輛進入斷電區后,系統由正常牽引控制模式切換至斷電區穿越控制模式,此時電機處于整流發電狀態,電容電壓及母線電壓穩定在目標值。為盡量減小供電電壓恢復時母線電壓突變對牽引系統的沖擊,設定穩壓控制器的控制目標為母線電壓額定值750V。由于支撐電容上基本沒有消耗能量的路徑,需要的功率非常小,當轉矩指令為正值時,永磁電機消耗能量,電容電壓下降;轉矩指令為負值時,永磁電機惰行發電,能夠向電容回饋能量,電容電壓上升[14-15]。因此,將電容電壓作為閉環控制量,通過PI控制器生成對應的轉矩指令,便可實現對電容電壓的實時調節。地鐵永磁同步牽引系統斷電區穿越穩壓控制器如圖6所示。

圖6 斷電區穿越穩壓控制器
當地鐵車輛駛離斷電區,而牽引系統并未下達由斷電區穿越模式切換至正常運行模式指令時,由于集電靴重新從接觸軌受電,母線電壓L以及電容電壓dc實際由接觸軌供電電壓決定[16-17]。此時PI調節器達到飽和,穩壓控制器無法繼續調節電容電壓,轉矩指令為調節器允許輸出的極值。如果母線電壓低于電容電壓給定,電壓調節負向飽和,轉矩給定為PI調節器允許輸出的最小值(負轉矩);如果母線電壓高于電容電壓給定,電壓調節正向飽和,轉矩給定為PI調節器允許輸出的最大值(正轉矩)。因此,在斷電區穿越控制模式供電電壓恢復調節器達到飽和后,并不會影響系統運行,牽引系統按照設定的最大最小轉矩值恒指令運行,待系統給出退出斷電區指令后再恢復正常運行。
3.2 斷電區穿越控制模型
從圖6可以發現,斷電區穿越模式的控制目標為電容電壓,與正常牽引模式的區別在于不再執行司控室的轉矩指令,而是通過穩壓控制器對電容電壓的調節得到轉矩指令。因此,牽引系統處于斷電區穿越模式時,電流內環的控制方式與正常牽引模式是相同的,只需要在正常牽引模式的基礎上增加電壓外環調節,便可以實現對斷電區穿越的控制。
在dq旋轉坐標系下,永磁同步牽引系統電壓與電流的關系[18-19]為
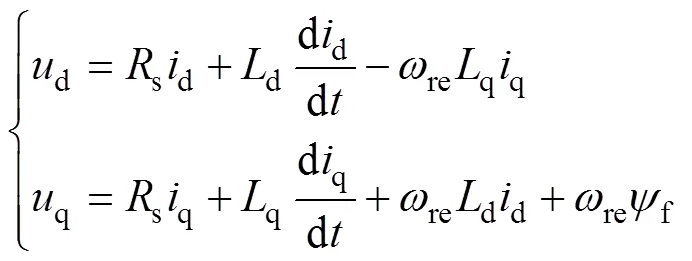
式中,d、q分別為d、q軸電壓;d、q分別為d、q軸電流;d、q分別為d、q軸電感;s為定子電阻;re為電角速度;f為轉子磁。
根據式(1)中電壓與電流關系式,可以得到永磁同步牽引系統電流內環控制框圖如圖7所示。
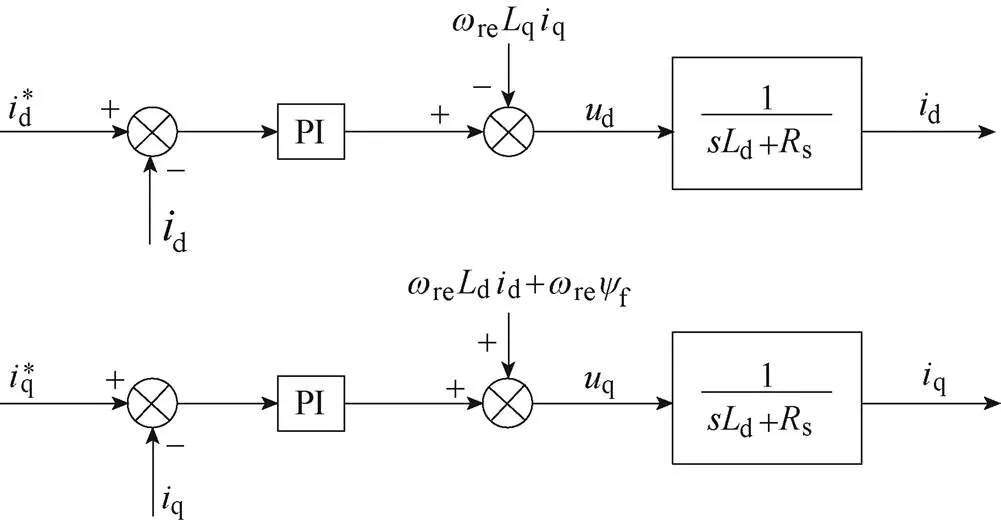
圖7 永磁同步牽引系統電流內環控制框圖
據此,可以得到電流內環的傳遞函數,d、q軸開環傳遞函數id和iq分別為
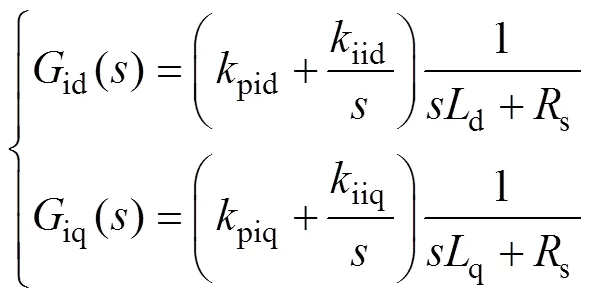

根據上面的分析,地鐵車輛駛離斷電區后,供電電壓恢復,穩壓控制器中電壓外環調節器會達到飽和狀態,所以可以使電壓外環調節器進入飽和狀態并保持一段時間,作為系統由斷電區模式重新進入牽引模式的判定條件。考慮到在極特殊情況下,如果母線電壓出現擾動,電壓外環調節器也可能出現瞬間飽和的狀態[20]。因此,系統退出斷電區模式進入正常牽引模式還設置了第二個保底條件,即保持斷電區模式運行設定的固定時間后退出。兩個條件配合使用既保證了控制模式識別的效率,又保證了控制模式切換的可靠性。此外,考慮到接觸軌自身出現供電丟失引起系統進入斷電區模式的情況,當牽引系統給出退出斷電區穿越模式回到正常牽引模式指令后,如果供電電壓依然沒有恢復,即系統再次檢測到母線電壓過低,則判定為供電丟失,牽引系統報欠電壓故障并停止運行。
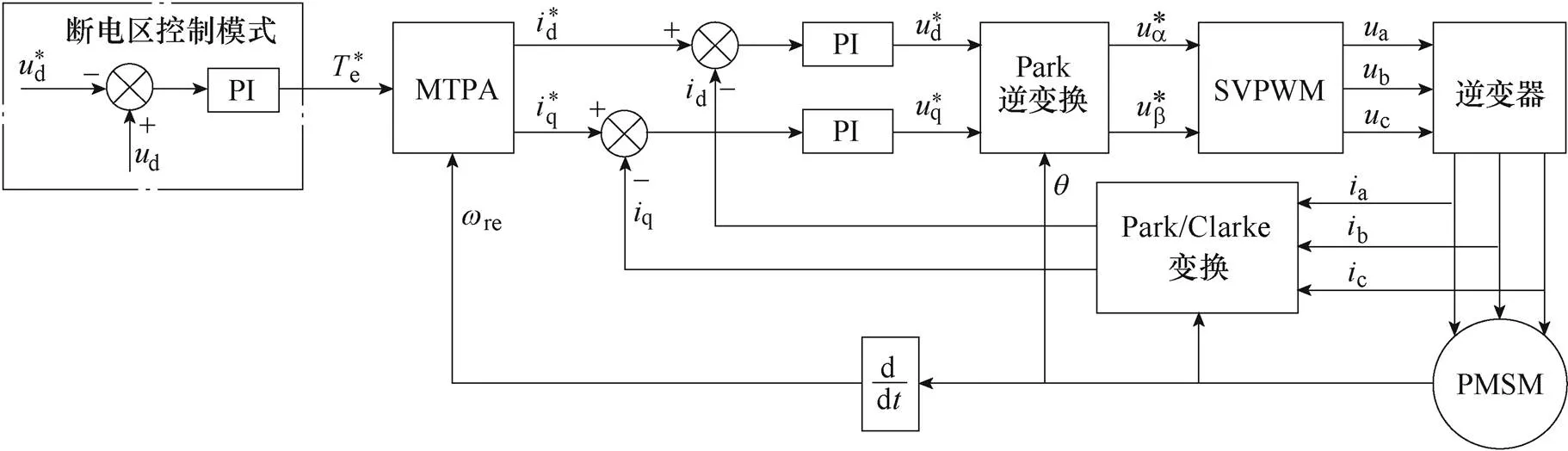
圖8 地鐵永磁同步牽引系統斷電區穿越整體框圖
4 仿真與試驗
4.1 斷電區穿越仿真分析
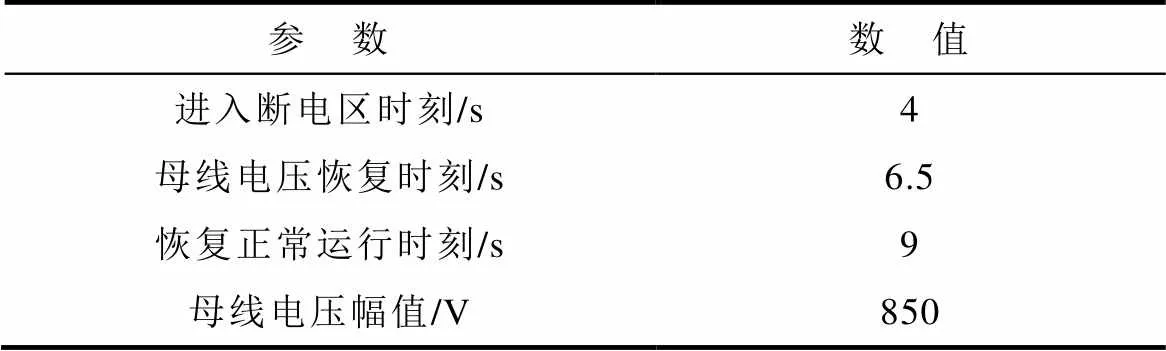
為了對本文提出的基于穩壓穿越斷電區控制策略進行仿真驗證,基于PLECS平臺搭建了地鐵永磁同步牽引系統仿真模型。考慮到供電電壓波動范圍為500~900V,為將母線電壓波動與電容電壓間形成突變的影響考慮在內,設置母線電壓為850V。在實際線路運行中,車輛通過斷電區時間在1s左右,由于試驗現場條件限制,直流供電需要人為操作開關,難以在1s內實現供電開關斷開并重新合閘的過程,為便于實現在斷電區穿越模式內完成供電電壓的恢復,現場試驗設定斷電區模式保持時間為5s。為保證仿真與試驗環境一致,仿真分析時設置斷電區模式保持時間也為5s,母線電壓恢復時間為2.5s。
地鐵永磁同步牽引系統斷電區穿越仿真參數見表2。
表2 斷電區穿越仿真參數
Tab.2 Simulation parameters of power-off traversing
依據表2中仿真參數,分別以不采取任何策略直接通過斷電區和采用本文提出的穩壓策略通過斷電區兩種方式,進行相同工況下地鐵永磁同步牽引系統斷電區穿越仿真分析,其中,直接通過斷電區策略選取可能出現的最惡劣工況,即在支撐電容上的電能完全耗盡時恢復供電,兩種策略下斷電區穿越過程中電壓、轉矩及電流仿真波形分別如圖9和圖10所示。

圖9 直接通過斷電區仿真波形
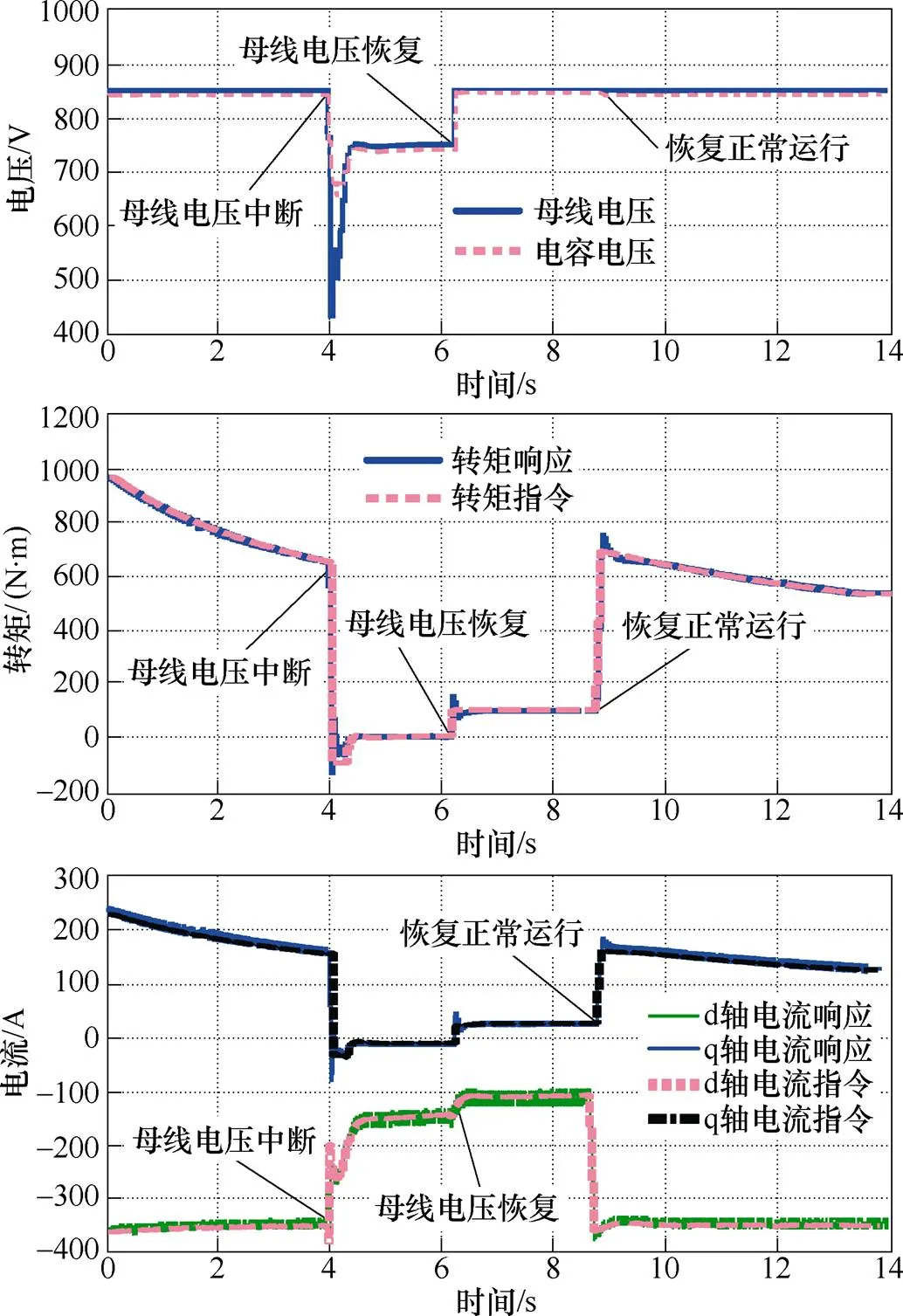
圖10 穩壓策略通過斷電區仿真波形
從圖9仿真結果可以發現,不采取任何策略直接通過斷電區時,當供電電壓丟失,牽引系統以零轉矩運行狀態通過斷電區,待供電電壓恢復時,由于母線電壓突變,轉矩和電流響應均出現劇烈沖擊,直流側電壓也出現振蕩,不利于系統穩定,同時會降低器部件使用壽命。
從圖10仿真波形可以看出,地鐵車輛在4s時刻進入斷電區,系統檢測到母線電壓低于450V時,牽引系統切換至斷電區穿越控制模式,穩壓控制器開始工作,由于此時電容電壓較低,系統產生負轉矩,向電容充電,電容電壓0.5s內穩定至750V,此時系統功率很小,因而電機轉矩基本為零。6.5s時刻車輛駛離斷電區,供電電壓恢復,母線電壓和電容電壓均恢復到供電電壓850V,穩壓控制器達到飽和,由于此時還處于斷電區穿越控制模式,電機按照調節器允許最大轉矩100N·m運行。9s時刻牽引系統給出退出斷電區穿越模式恢復正常牽引模式指令后,牽引系統按照司控室下達轉矩指令繼續運行,轉矩和電流均恢復正常。
仿真結果表明,在牽引系統穿斷電區的過程中,采用本文提出的穩壓控制策略,電流沒有出現明顯沖擊,電壓和轉矩也沒有出現振蕩,仿真結果驗證了本文所提出的斷電區穿越控制策略能夠使地鐵車輛在不關閉牽引系統不斷開主接觸器的情況下穩定通過斷電區。
4.2 斷電區穿越試驗驗證
為檢驗所提控制策略在地鐵車輛實際運行過程中斷電區穿越的控制效果,搭建了如圖11所示永磁同步牽引系統試驗平臺,通過模擬供電電壓斷電構造斷電區工況。參照仿真條件設置,斷電區穿越試驗參數設置見表3。

圖11 地鐵永磁同步牽引系統試驗平臺
表3 斷電區穿越試驗參數
Tab.3 Experimental parameters of power-off traversing
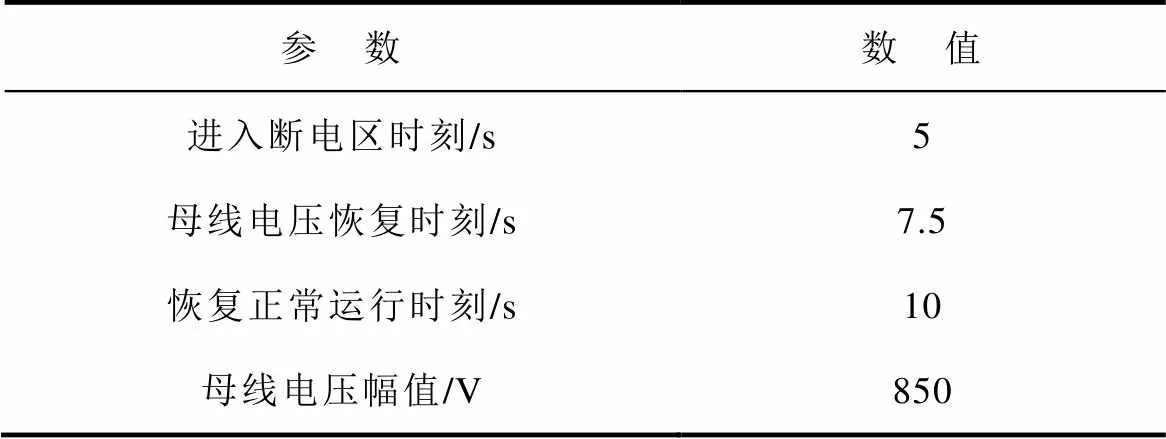
按照表3中參數進行地鐵永磁同步牽引系統斷電區穿越試驗驗證,基于本文所提穩壓穿越控制策略,牽引系統從進入斷電區到恢復正常運行的試驗波形如圖12所示。可以看出,5s時刻供電電壓丟失,母線電壓瞬間跌落,低于450V時系統判斷車輛進入斷電區,切換至斷電區穿越控制模式,穩壓控制器通過對輸出轉矩的調節使電容電壓迅速穩定至750V。7.5s時刻恢復供電,母線電壓恢復至850V,系統依然處于斷電區穿越控制模式,此時調節器飽和,系統按照設定轉矩最大值100N·m運行,由于功率較小,母線電壓依然維持在850V。10s時刻由斷電區穿越模式恢復正常牽引模式,牽引系統按照司控室下達的轉矩指令正常運行,斷電區順利通過。試驗波形中,10~10.7s母線電壓下降是由于試驗現場大功率運行時供電電壓被拉低,與本文控制策略的選用沒有關系。分析結果表明,地鐵車輛永磁同步牽引系統穿越斷電區的過程中,響應迅速,電壓轉矩及電流波形都沒有出現明顯的沖擊和振蕩,試驗結果與仿真結果一致,驗證了本文提出的基于穩壓穿越斷電區控制策略的可行性。
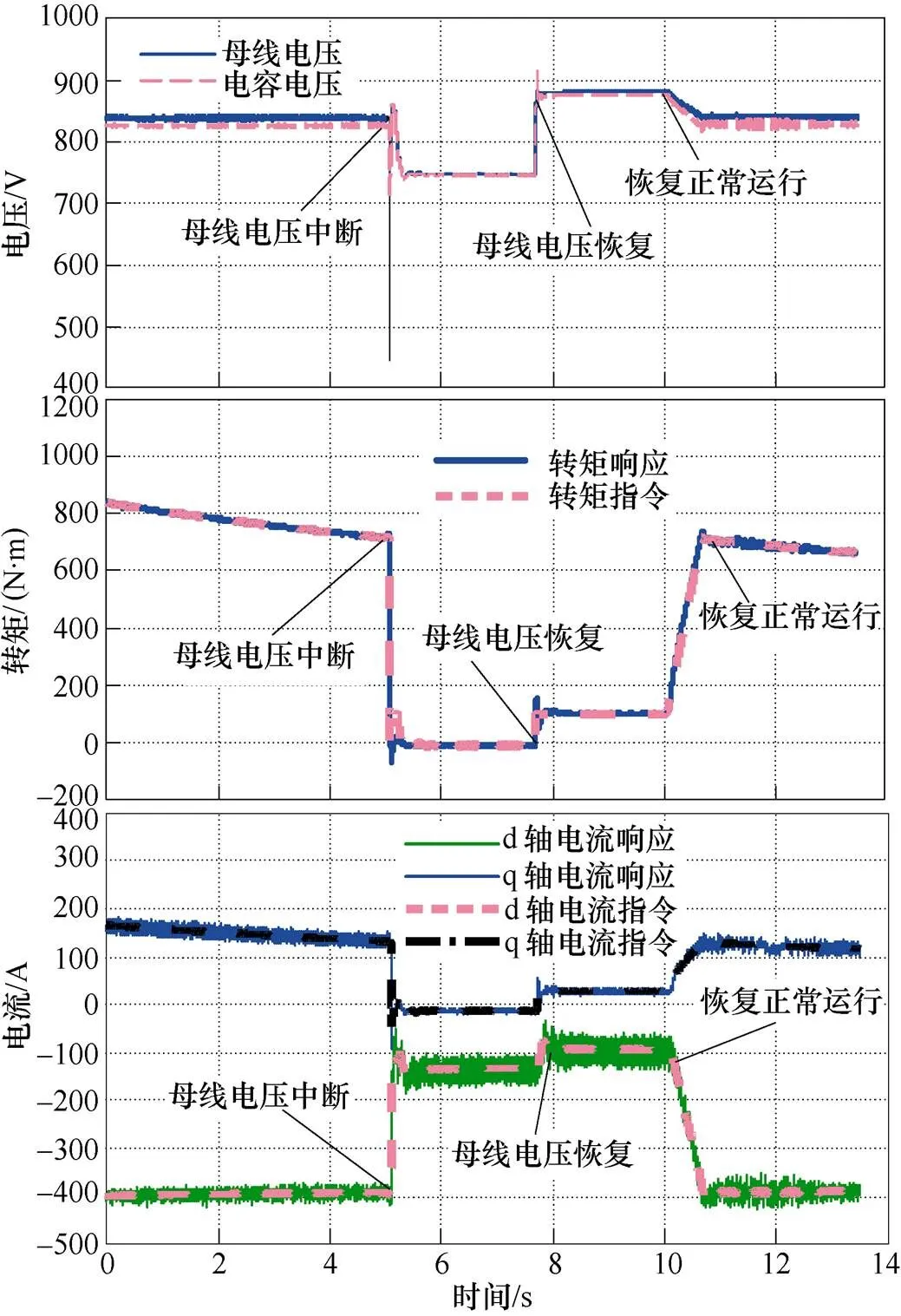
圖12 永磁同步牽引系統斷電區穿越試驗波形
本文所提出的斷電區穿越控制策略,依據母線電壓幅值的跌落判斷車輛是否進入斷電區,當母線電壓幅值滿足L<450V時,則判斷地鐵車輛進入斷電區。根據仿真和試驗分析,從母線電壓跌落到系統進入斷電區控制模式的時間只需要幾個ms。系統一旦進入斷電區穿越控制模式,電壓調節器開始工作,此時供電電壓不再影響系統運行,系統可以一直以斷電區模式穩定運行,直到牽引系統檢測到供電電壓恢復并發出退出指令后,系統退出斷電區穿越模式恢復到正常牽引模式。根據實際線路條件,列車穿越斷電區的時間通常在0.5~1s左右,而系統進入斷電區穿越模式只需要ms級時間,所以,系統有充裕的響應時間進入斷電區控制模式,本文設計斷電區穿越時間為5s,只為便于試驗現場對供電電源的人為操作。因此,斷電區長度不同,或車輛通過斷電區速度不同,只會影響牽引系統在斷電區穿越模式的運行時間,并不會影響采用本文策略穿越斷電區的控制效果。
為進一步驗證實際線路供電出現問題時,牽引系統能夠準確識別并報出欠電壓故障的控制效果,在系統正常運行過程中,模擬供電電壓中斷,并且不再恢復供電,試驗波形如圖13所示。
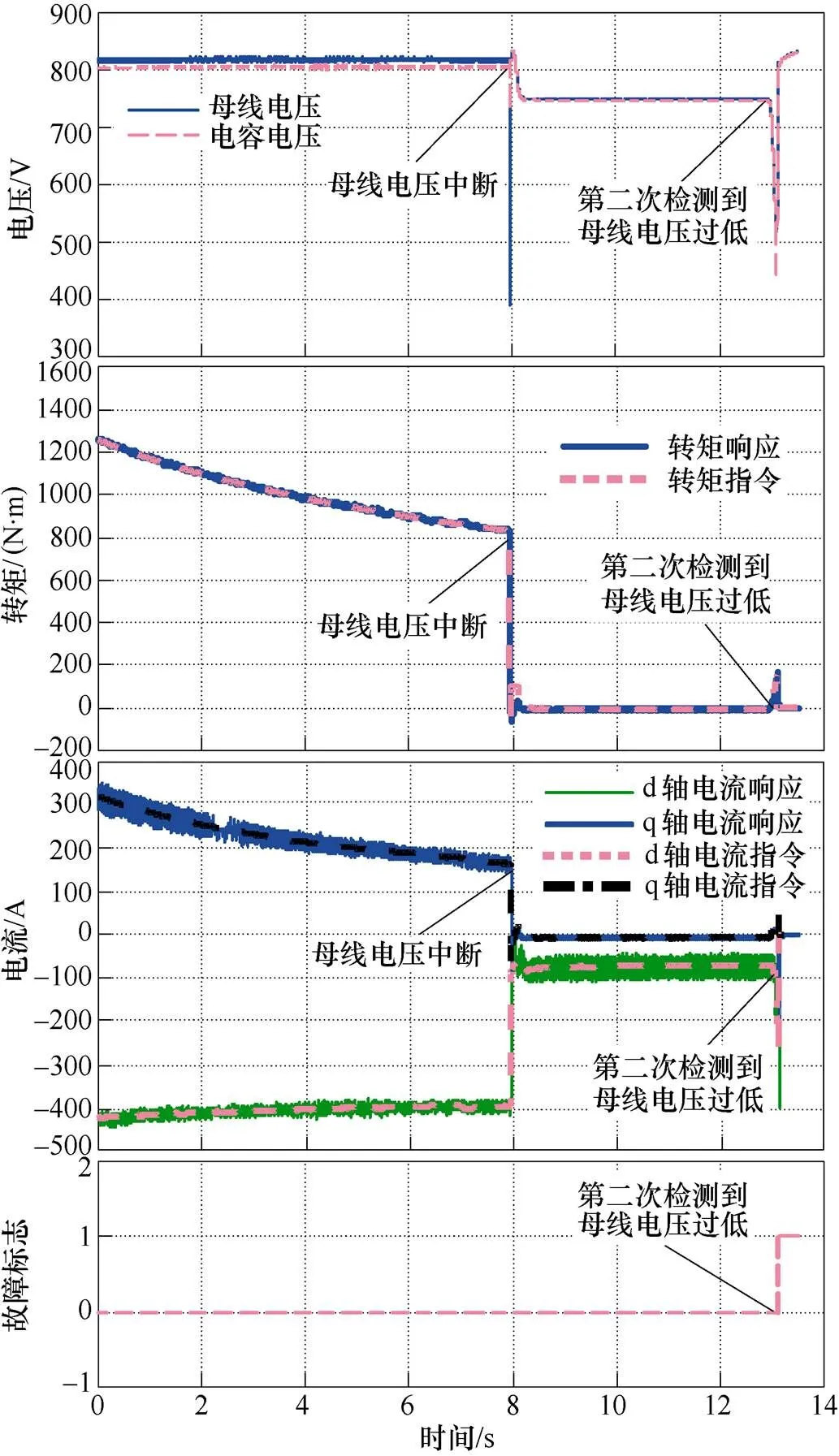
圖13 欠電壓故障試驗波形
從圖13試驗波形可以看出,牽引系統在8s時刻第一次檢測到母線電壓低于450V時,切換至斷電區穿越控制模式,通過穩壓控制器調節母線電壓穩定在額定值750V,13s時刻退出斷電區控制模式切換至正常牽引模式后,再次檢測到母線電壓低于450V,判定供電電壓并未恢復,并報出線路欠電壓故障。在整個過程中,系統響應穩定,沒有出現明顯的電流沖擊和轉矩波動,試驗結果驗證了本文所提出的控制策略能夠在發生供電故障時使系統平穩停機,準確報出欠電壓故障。
5 結論
本文針對軌道交通車輛永磁同步牽引系統斷電區穿越問題,分析了斷電區的產生原因及具體工況,給出了車輛進入與退出斷電區的判斷條件,并設計了基于穩壓穿越的斷電區控制策略,通過調節牽引系統工作在整流發電或正常牽引模式,維持支撐電容電壓和母線電壓穩定在額定值,從而避免經過斷電區時關閉牽引系統斷開主接觸器,并且在牽引系統重新接入供電時降低母線電壓突變引起的沖擊和振蕩。以北京地鐵某線路為例進行了仿真分析和試驗驗證,結果表明,本文所設計的基于穩壓穿越斷電區的控制策略能夠支持地鐵車輛在不關閉牽引系統保持接觸器合閘的條件下平穩穿越斷電區,提高了牽引系統的控制性能,降低了故障發生率。同時,在檢測到供電電壓丟失時,也能準確報出欠電壓故障,增加了地鐵永磁同步牽引系統的特色優勢。
[1] 張梓綏. 軌道交通中永磁同步電機控制關鍵技術研究[D]. 北京: 北京交通大學, 2019.
[2] 張宏宇. 天津地鐵2號線接觸軌斷電區分析與應對措施[J]. 科技創新導報, 2019, 4(11): 32-34.
Zhang Hongyu. Analysis and countermeasures of contact rail power-off area of Tianjin metro line 2[J]. Science and Technology Innovation Herald, 2019, 4(11): 32-34.
[3] 李微, 周雪松, 馬幼捷, 等. 三端口直流微網母線電壓控制器及多目標控制[J]. 電工技術學報, 2019, 34(1): 92-102.
Li Wei, Zhou Xuesong, Ma Youjie, et al. Bus voltage controller and multi objective control of three port DC microgrid[J]. Transactions of China Electro- technical Society, 2019, 34(1): 92-102.
[4] 延娓娓, 劉帥. 單邊供電系統斷電區的地鐵車輛通過策略[J]. 城市軌道交通研究, 2018, 21(2): 38-41.
Yan Weiwei, Liu Shuai. Metro vehicle passing strategy in the outage area of unilateral power supply system[J]. Urban Mass Transit, 2018, 21(2): 38-41.
[5] 張輝, 閆海明, 支娜, 等. 基于母線電壓微分前饋的直流微電網并網變換器控制策略[J]. 電力系統自動化, 2019, 43(15): 166-175.
Zhang Hui, Yan Haiming, Zhi Na, et al. Control strategy of grid-connected converter in DC microgrid based on bus voltage differential feedforward[J]. Automation of Electric Power Systems, 2019, 43(15): 166-175.
[6] Choudhury A, Pillay P, Williamson S S. Modified DC-bus voltage-balancing algorithm based three- level neutral-point-clamped IPMSM drive for electric vehicle applications[J]. IEEE Transactions on Indu- strial Electronics, 2016, 63(2): 761-772.
[7] 滕昌鵬, 王玉斌, 周博愷, 等. 含恒功率負載的直流微網大信號穩定性分析[J]. 電工技術學報, 2019, 34(5): 973-982.
Teng Changpeng, Wang Yubin, Zhou Bokai, et al. Stability analysis of large signal in DC microgrid with constant power load[J]. Transactions of China Electrotechnical Society, 2019, 34(5): 973-982.
[8] Huang Xinxing, Yao Yihua, Lu Qinfen, et al. Control simulation of PMSM traction system of high speed train when passing neutral section[J]. Compel Inter- national Journal of Computations & Mathematics in Electrical, 2016, 35(2): 782-795.
[9] 賴聲鋼. 接觸軌系統在道岔區可能存在列車失電問題的原因分析及解決方案[J]. 城市軌道交通研究, 2015, 18(5): 115-123.
Lai Shenggang. Cause analysis and solution of the problem of train power loss in the contact rail system in the turnout area[J]. Urban Mass Transit, 2015, 18(5): 115-123.
[10] Diao Lijun, Dong Kan, Yin Shaobo, et al. Ripple analysis and control of electric multiple unit traction drives under a fluctuating DC link voltage[J]. Journal of Power Electronics, 2016, 16(5): 1851-1860.
[11] 張穎, 王惠民, 葛興來. 基于前饋電壓補償的地鐵牽引變流器直流側震蕩抑制方法[J]. 中國電機工程學報, 2018, 38(9): 2728-2735.
Zhang Ying, Wang Huimin, Ge Xinglai. DC link stabilization method for metro traction converter motor system based on feedforward voltage com- pensation[J]. Proceedings of the CSEE, 2018, 38(9): 2728-2735.
[12] 魏文婧, 胡海濤, 王科, 等. 基于鐵路功率調節器的高速鐵路牽引供電系統儲能方案及控制策略[J].電工技術學報, 2019, 34(6): 1290-1299.
Wei Wenjing, Hu Haitao, Wang Ke, et al. Energy storage scheme and control strategy of high-speed railway traction power supply system based on railway power regulator[J]. Transactions of China Electrotechnical Society, 2019, 34(6): 1290-1299.
[13] Calleja C, Lopez-De-Heredia A, Gaztanaga H, et al. Validation of a modified direct self control strategy for PMSM in railway traction applications[J]. IEEE Transactions on Industrial Electronics, 2016, 12(1): 1021-1032.
[14] 甘志偉, 繆冬敏, 王云沖, 等. 寬轉速范圍永磁同步發電機系統穩壓控制及參數優化[J]. 電工技術學報, 2020, 35(8): 1624-1633.
Gan Zhiwei, Miu Dongmin, Wang Yunchong, et al. Voltage control and parameter optimization of wide speed range permanent magnet synchronous gener- ator system[J]. Transactions of China Electro- technical Society, 2020, 35(8): 1624-1633.
[15] 林文立, 劉志剛, 孫大南, 等. 地鐵牽引系統的穩定性提升控制[J]. 電機與控制學報, 2012, 16(2): 56-61.
Lin Wenli, Liu Zhigang, Sun Danan, et al. Stability improvement control of metro traction system[J]. Electric Machines and Control, 2012, 16(2): 56-61.
[16] 李夏青, 左麗. 直流牽引網故障電流能量譜及特征矢量[J]. 電工技術學報, 2010, 25(11): 164-168.
Li Xiaqing, Zuo Li. Energy spectrum and characte- ristic vector of fault current in DC traction net- work[J]. Transactions of China Electrotechnical Society, 2010, 25(11): 164-168.
[17] 鄧睿, 劉碧, 宋文勝. 牽引供電網-多臺機車耦合系統的低頻振蕩分析與抑制[J]. 電工技術學報, 2019, 34(增刊1): 327-335.
Deng Rui, Liu Bi, Song Wensheng. Analysis and suppression of low-frequency oscillation of traction power supply network-multi-locomotive coupling system[J]. Transactions of China Electrotechnical Society, 2019, 34(S1): 327-335.
[18] 劉珅, 高琳. 永磁同步電機的改進模型預測直接轉矩控制[J]. 電機與控制學報, 2020, 24(1): 10-17.
Liu Kun, Gao Lin. Improved model predictive direct torque control of permanent magnet synchronous motor[J]. Electric Machines and Control, 2020, 24(1): 10-17.
[19] 姚緒梁, 王旭, 馮澤文. 改善三相電壓型PWM整流器動態性能的研究[J]. 電工技術學報, 2016, 31(增刊1): 169-175.
Yao Xuliang, Wang Xu, Feng Zewen. Research on improving the dynamic performance of three-phase voltage PWM rectifier[J]. Transactions of China Electrotechnical Society, 2016, 31(S1): 169-175.
[20] 高雅, 劉衛國, 駱光照. 牽引機車用永磁同步電機斷電-重投控制系統研究[J]. 電工技術學報, 2016, 31(6): 100-107.
Gao Ya, Liu Weiguo, Luo Guangzhao. Research on power-off and re-throw control system of permanent magnet synchronous motor for traction locomo- tive[J]. Transactions of China Electrotechnical Society, 2016, 31(6): 100-107.
Power-Off Area Traversing Control Strategy of Permanent Magnet Synchronous Motor Traction System in Rail Transit Vehicle
(National Key Laboratory of Science and Technology on Vessel Integrated Power System Naval University of Engineering Wuhan 430033 China)
Permanent magnet synchronous motor (PMSM) traction drive system is an important part of the stable operation of rail transit vehicle. When the vehicle passes through the power-off area, the power supply system will temporarily lose power and cause the bus voltage mutation. Such mutation will bring current shock and LC oscillation to the traction system, and even trigger serious faults of the system, affecting system operation. In order to enable the vehicle to pass through the power-off area smoothly, this paper establishes the equivalent circuit of the PMSM traction system traversing the power-off area, and deduces the mathematical model before and after the rail transit vehicle traction system enters the power-off area. On this basis, a control strategy for stabilizing the bus voltage passing through the power-off area by rectifying power generation is proposed. As a result, the closing of the traction system and the disconnection of the main contactors can be avoided, and the sudden change of bus voltage when passing through the power-off area is reduced, thereby reducing the impact and oscillation of the traction system. Simulation and experimental results verify the feasibility and effectiveness of the proposed control strategy.
Rail transit vehicle, permanent magnet synchronous motor (PMSM), traction control system, power-off area, rectifier generation
10.19595/j.cnki.1000-6753.tces.200504
TM46
張偉偉 男,1989年生,博士,助理研究員,主要研究方向為永磁同步電機驅動控制技術。E-mail: zw7589@163.com
劉計龍 男,1988年生,副研究員,碩士生導師,主要研究方向為永磁同步電機驅動控制技術以及模塊化多端口電力電子變換器技術。E-mail: 66976@163.com(通信作者)
2020-05-14
2020-06-29
國家自然科學基金(51807200, 51477180)和國家重點基礎研究發展計劃(973)(2015CB251004)資助項目。
(編輯 崔文靜)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45