基于四元數(shù)乘法可易性的機(jī)器人手眼標(biāo)定算法*
2021-08-31 04:54:56吳慶華李子奇李宗耀邱捷鋒
組合機(jī)床與自動化加工技術(shù) 2021年8期
關(guān)鍵詞:實(shí)驗(yàn)
吳慶華,李子奇,李宗耀,邱捷鋒
(湖北工業(yè)大學(xué) a.機(jī)械工程學(xué)院;b.現(xiàn)代制造與質(zhì)量工程湖北省重點(diǎn)實(shí)驗(yàn)室,武漢 430068)
0 引言
機(jī)器人視覺引導(dǎo)系統(tǒng)被廣泛應(yīng)用于工業(yè)領(lǐng)域,該系統(tǒng)的關(guān)鍵問題是求取機(jī)器人工具坐標(biāo)系和視覺坐標(biāo)系之間的轉(zhuǎn)換關(guān)系,可以用齊次矩陣描述這種關(guān)系[1],如何快速準(zhǔn)確地求取齊次矩陣是問題的核心部分。文獻(xiàn)[1-2]最早提出AX=XB手眼標(biāo)定模型,由于四元數(shù)可以方便地描述剛體旋轉(zhuǎn)運(yùn)動,文獻(xiàn)[3]提出了基于四元數(shù)的求解算法,該算法步驟復(fù)雜,要求機(jī)器人末端執(zhí)行器的旋轉(zhuǎn)角θ≠360°n(n=0,1,...);文獻(xiàn)[4]基于矩陣奇異值分解求解手眼標(biāo)定方程,其算法簡潔但旋轉(zhuǎn)角θ依然受到限制。在手眼標(biāo)定的實(shí)際應(yīng)用中,需要依據(jù)旋轉(zhuǎn)角θ判斷測量數(shù)據(jù)是否可以用于標(biāo)定,使得標(biāo)定過程復(fù)雜化。
針對上述問題,本文提出一種基于四元數(shù)乘法可易性的手眼標(biāo)定方程新解法,通過四元數(shù)乘法可易性改寫旋轉(zhuǎn)矩陣,再結(jié)合矩陣奇異值分解篩選求解旋轉(zhuǎn)矩陣,使旋轉(zhuǎn)角θ不受限制,之后代入求解平移向量,最后通過仿真和驗(yàn)證實(shí)驗(yàn),檢驗(yàn)該方法準(zhǔn)確性和魯棒性。
1 機(jī)器人手眼標(biāo)定問題描述
機(jī)器人手眼系統(tǒng)主要分為Eye-in-Hand系統(tǒng)和Eye-to-Hand系統(tǒng),由于在Eye-in-Hand系統(tǒng)中,攝像機(jī)被固定在機(jī)器人末端執(zhí)行器上,可以隨機(jī)器人同時運(yùn)動,因此被廣泛用于工業(yè)生產(chǎn)當(dāng)中[5]。為求解AX=XB類型手眼標(biāo)定方程,可將方程展開如下:
(1)
其中,RA、RX和RB分別表示齊次變換矩陣A、B和X的旋轉(zhuǎn)部分,tA、tX和tB分別表示對應(yīng)變換矩陣的平移部分,將式(1)再次展開可得:
(2)
基于四元數(shù)和矩陣奇異值分解的傳統(tǒng)手眼標(biāo)定方法[3-4]通過四元數(shù)改寫旋轉(zhuǎn)矩陣方程為Cx=0的形式后,通過歐拉參數(shù)[θ,uT]和單位四元數(shù)向量p=[e0,e1,e2,e3]T之間的轉(zhuǎn)換關(guān)系,將旋轉(zhuǎn)矩陣方程整理得到下式:
(3)
2 四元數(shù)乘法可易性手眼標(biāo)定方法
2.1 四元數(shù)乘法可易性
單位四元數(shù)可以用來描述剛體在三維空間中的旋轉(zhuǎn)變換[3],設(shè)p和q分別表示兩個描述三維旋轉(zhuǎn)運(yùn)動的單位四元數(shù),其乘法可易性[6]描述如下:
p·q=M(p)·q=M(q)+·p
(4)
(5)
(6)
其中,M(q)+稱為蛻變矩陣。
2.2 最小奇異值篩選求解旋轉(zhuǎn)矩陣RX
對于Cx=0形式的超定方程[7],對系數(shù)矩陣C進(jìn)行奇異值分解即C=UΣVT時,x的最優(yōu)解為右奇異矩陣V中最小奇異值所對應(yīng)的列向量。在傳統(tǒng)方法中,在對系數(shù)矩陣進(jìn)行奇異值分解后,直接通過最小奇異值對應(yīng)的列向量求取單位四元數(shù),再求解旋轉(zhuǎn)矩陣。由于在仿真和實(shí)際應(yīng)用中,無法保證測量數(shù)據(jù)構(gòu)成的系數(shù)矩陣直接進(jìn)行奇異值分解時一定可以得到較好的結(jié)果,本文采用一種組合測量矩陣篩選最小奇異值的求解方法。
將式(3)描述旋轉(zhuǎn)部分的方程RARX=RXRB使用四元數(shù)乘法進(jìn)行表示,設(shè)a、b和qx分別表示旋轉(zhuǎn)矩陣RA、RB和RX所對應(yīng)的單位四元數(shù),則旋轉(zhuǎn)部分方程描述如下:
a·qx=qx·b
(7)
利用四元數(shù)乘法可易性將上式展開,整理移項(xiàng)后得到:
(8)
由于求解該方程時,機(jī)器人末端執(zhí)行器至少需要改變n(n≥2)次位姿[1],設(shè)S(n)=(M(an)-M(bn)+)為第n次測量結(jié)果所對應(yīng)的4×4形式矩陣,求解旋轉(zhuǎn)矩陣的偽代碼如下所示:
輸入:處理后的測量矩陣S(1),S(2)……S(n)(n≥2)
初始化:k=0
1:fori=2→ndo

3: form=1→jdo
4:k=k+1
5: 構(gòu)造系數(shù)矩陣T(k)=[M(1),M(2),……,M(i)]
6: end for
7:end for
8:對T(k)進(jìn)行奇異值分解,將每次奇異值分解得到的最 小奇異值記為P(k)
9:用P(k)的最小值P(k)min對應(yīng)的特征向量v,求解對
應(yīng)單位四元數(shù)qx
10:用單位四元數(shù)qx求解旋轉(zhuǎn)矩陣Rx
輸出:旋轉(zhuǎn)矩陣Rx
2.3 求解平移向量tX
將(2)中的平移向量方程RAtX+tA=RXtB-tA改寫為如下形式:
(RA-I)tX=RXtB-tA
(9)
通過改變機(jī)器人末端執(zhí)行器的位姿進(jìn)行n次測量后,將之前求解得到的旋轉(zhuǎn)矩陣RX代入計(jì)算,令
(10)
通過最小二乘法可以求得平移向量tX=(DTD)-1DTE。
3 實(shí)驗(yàn)結(jié)果與分析
3.1 仿真實(shí)驗(yàn)結(jié)果及分析
由于在機(jī)器人末端執(zhí)行器旋轉(zhuǎn)角θ=360°n(n=0,1,...)時,傳統(tǒng)方法無法直接進(jìn)行求解,因此仿真實(shí)驗(yàn)的主要目的是驗(yàn)證本文方法的準(zhǔn)確性和魯棒性,采用了處理器主頻為2.6 G,內(nèi)存為8 G的計(jì)算機(jī)進(jìn)行仿真實(shí)驗(yàn),仿真軟件為MATLAB R2016b,仿真實(shí)驗(yàn)及數(shù)據(jù)處理步驟如下:
(1)依據(jù)文獻(xiàn)[8],假定機(jī)器人手眼關(guān)系X的真值為:
(2)隨機(jī)生成n個正交矩陣RA1,RA2,…,RAn和平移向量tA1,tA2,...,tAn,分別組成轉(zhuǎn)換矩陣A1,A2,...,A3,通過方程AX=XB求解對應(yīng)變換矩陣B1,B2,..,Bn的旋轉(zhuǎn)部分RB1,RB2,...,RBn和平移部分tB1,tB2,...,tBn。
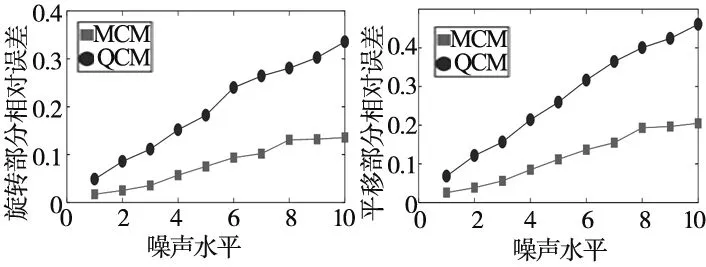
(3)基于文獻(xiàn)[9]的方法,為模擬實(shí)際測量情況,在模擬數(shù)據(jù)中加入高斯噪聲(Gaussian Noise),對RAi和RBi添加均值為0,標(biāo)準(zhǔn)差為0.01d的高斯噪聲;對tAi和tBi添加均值為添加均值為0,標(biāo)準(zhǔn)差為0.2d的高斯噪聲,其中d代表噪聲水平。
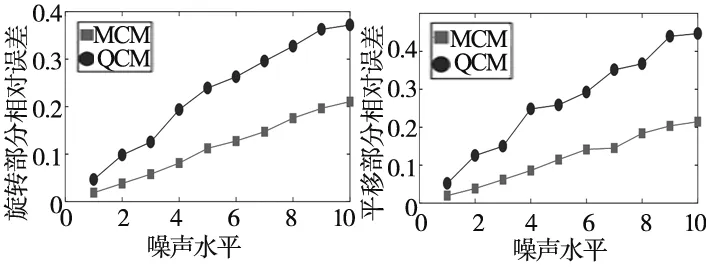
(a)相對旋轉(zhuǎn)誤差 (b)相對平移誤差
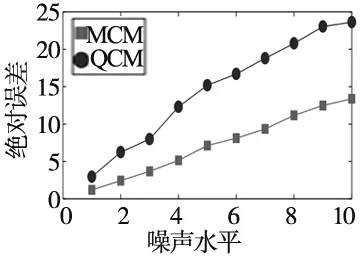
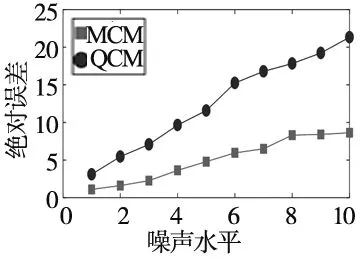
(c) 絕對誤差圖1 僅對A添加噪聲
(a)相對旋轉(zhuǎn)誤差 (b)相對平移誤差
(c)絕對誤差 圖2 僅對B添加噪聲
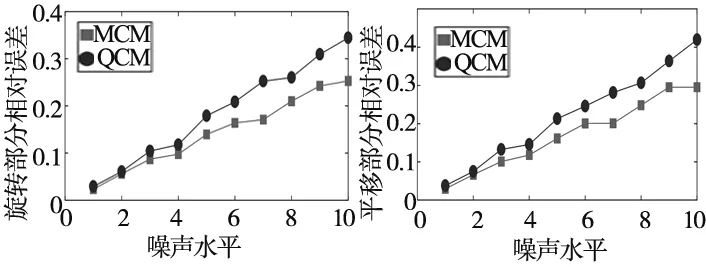
(a)相對旋轉(zhuǎn)誤差 (b)相對平移誤差
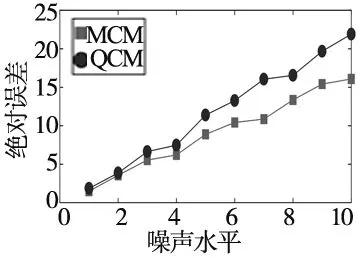
(c)絕對誤差圖3 同時對A和B添加噪聲
從圖中可以看出,所提算法在噪聲水平相同的情況下,準(zhǔn)確性優(yōu)于文獻(xiàn)[4]所提出的求解方法,并且隨著噪聲水平的增大,本文算法依舊具有較好的魯棒性。
3.2 手眼標(biāo)定實(shí)驗(yàn)
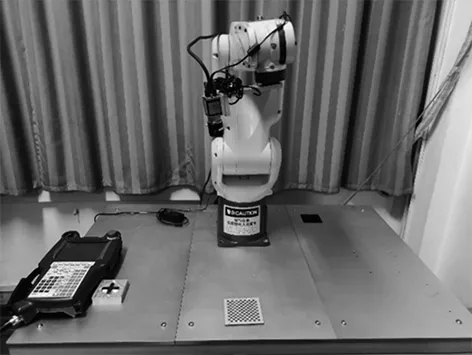
圖4 實(shí)驗(yàn)平臺照片
為驗(yàn)證本文算法在實(shí)際應(yīng)用中的可行性和準(zhǔn)確性,使用FANUC公司的LR Mate 200iD型工業(yè)機(jī)器人、Basler公司的acA1600-20gm型工業(yè)相機(jī)和尺寸為100 mm×100 mm的棋盤格標(biāo)定板進(jìn)行驗(yàn)證實(shí)驗(yàn),搭建的實(shí)驗(yàn)平臺與如圖4所示。
其中,F(xiàn)ANUC工業(yè)機(jī)器人的重復(fù)定位精度為±0.02 mm,Basler工業(yè)相機(jī)的分辨率為1626×1236 pixels,像元尺寸為4.4 μm×4.4 μm,鏡頭焦距為25 mm,使用連接件將相機(jī)和工業(yè)機(jī)器人的法蘭盤緊固在一起。
實(shí)驗(yàn)流程如下:
(1)移動工業(yè)機(jī)器人帶動工業(yè)相機(jī)在10個不同位姿下對棋盤格標(biāo)定板進(jìn)行拍照,記錄各位姿下機(jī)器人控制器的6個讀數(shù)(x,y,z,w,p,r)并改寫成對應(yīng)的齊次轉(zhuǎn)換矩陣(P1,P2,...,P10),該矩陣描述了機(jī)器人法蘭中心的工具坐標(biāo)系和機(jī)器人基坐標(biāo)系之間的坐標(biāo)轉(zhuǎn)換關(guān)系。
(2)對采集的10張圖像使用MATLAB視覺工具箱進(jìn)行標(biāo)定相機(jī)內(nèi)外參數(shù)的標(biāo)定,如圖5所示,得到10個不同位姿下的相機(jī)外參矩陣(Q1,Q2,...,Q10)。
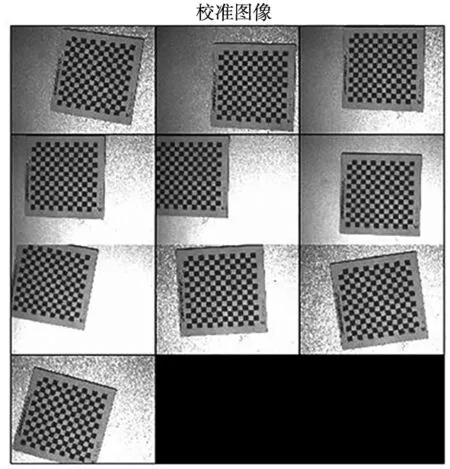
圖5 相機(jī)內(nèi)外參數(shù)標(biāo)定示意圖

表1 驗(yàn)證實(shí)驗(yàn)結(jié)果
從表1可以看出,在10組重復(fù)實(shí)驗(yàn)中,本文所提手眼標(biāo)定算法的精度可以滿足機(jī)器人視覺系統(tǒng)在工件抓取應(yīng)用中的需求,本文算法在旋轉(zhuǎn)部分和平移部分的均方根誤差相對傳統(tǒng)算法分別減少了0.007 4和0.033 4。選取平移和旋轉(zhuǎn)誤差最小的一組求解值作為手眼標(biāo)定矩陣的真實(shí)值,如下所示:

4 結(jié)論
本文基于四元數(shù)乘法可易性,結(jié)合最小奇異值篩選,提出了一種手眼標(biāo)定方程解法,解決了基于四元數(shù)的和矩陣奇異值分解的手眼標(biāo)定算法在標(biāo)定時需要驗(yàn)證機(jī)器人末端執(zhí)行器旋轉(zhuǎn)角θ≠360°n(n=0,1,...)的問題。仿真實(shí)驗(yàn)的結(jié)果表明,本文所提算法對比傳統(tǒng)算法具有更好的準(zhǔn)確性和魯棒性。驗(yàn)證實(shí)驗(yàn)的結(jié)果表明,本文算法在實(shí)際應(yīng)用中具有可行性。
猜你喜歡
作文·小學(xué)低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
