CORS結合陀螺儀在杭富城際鐵路隧道定向測量中的應用
2021-09-01 10:20:46楊彬林飛
城市勘測 2021年4期
關鍵詞:測量
楊彬,林飛
(杭州市勘測設計研究院有限公司,浙江 杭州 310012)
1 引 言
在隧道的盾構施工中,一般采用單向掘進,由于接收端的盾構鋼環的大小和位置是固定的,其半徑通常只比盾構機的半徑大 20 cm,如何確保盾構機按照設計的線路從接收鋼環中順利貫通出去就顯得尤為重要了。
如何引入高精度的坐標方位角對保證水平方向的順利貫通意義重大[1],傳統的方法是通過精密導線傳遞式引測至洞內,但是這種方法必然會隨著掘進距離的增長而伴隨著精度的下降,一般來說,對于距離大于 1.5 km的隧道,為保證順利貫通,在掘進過程中加測陀螺邊可以有效地檢核及糾正方位的傳遞。
另一方面,如要確保盾構隧道的順利貫通,隧道兩端控制點的準確性乃至整個基準控制網的相對精度和絕對精度都必須要有所保證。作為整個工程平面測繪的基準,首級GNSS控制網在城市軌道交通的控制測量中至關重要。城市CORS一般和當地的城市高等級控制點均進行過聯測,各點具有良好的兼容性[2]。考慮到整個工程與其他地鐵線路的銜接問題,平面基準網的起算點采用城市連續運行參考站(CORS)系統最為合適,且城市CORS具有點位穩定、觀測條件好、觀測時段長等優點[3],有利于提高平面基準網的精度。
2 平面基準網的建立
杭州至富陽城際鐵路工程位于杭州市主城區與富陽區(原富陽市)之間,工程沿線點間高差較大,地形條件復雜。全長約 23.508 km,設站11座,均為地下站,平均站間距約 2.3 km,在終點站與杭州地鐵6號線搭接。該工程全線區間除很小部分采用明挖以外,絕大部分均采用盾構施工。
工程線路沿線共布設了32個GNSS點,然后與4個距離工程線路最近的CORS站點一起組成平面基準網,如圖1所示:
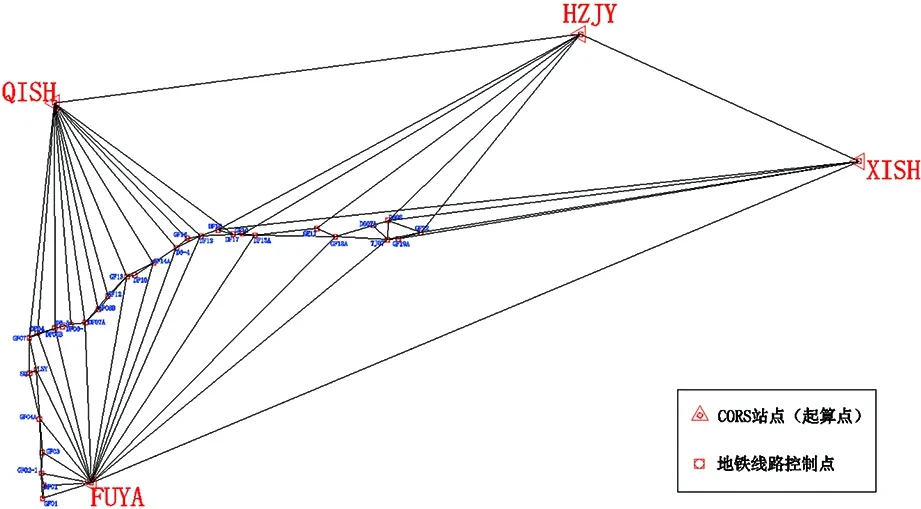
圖1 平面基準網示意圖
外業采用6臺Trimble R9雙頻GPS接收機同步進行,考慮到CORS站點與線路控制點距離較長,為了盡量提高精度,將觀測時間延長至2個小時,具體作業內容按表1規定執行:
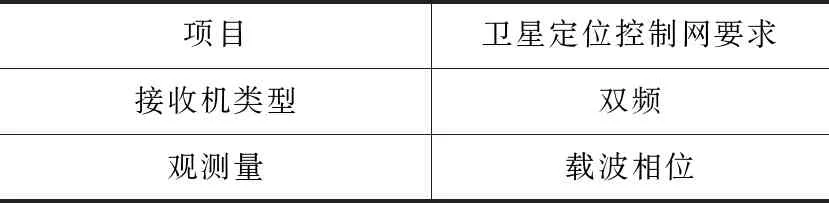
GPS測量作業技術指標 表1
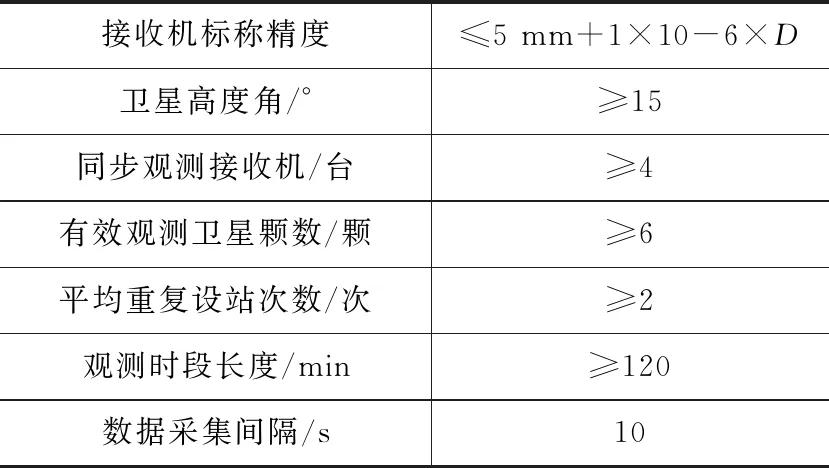
續表1
內業采用TBC軟件進行基線解算,并采用武漢大學COSA平差軟件進行平差。平面基準網二維約束平差的結果如表2所示:
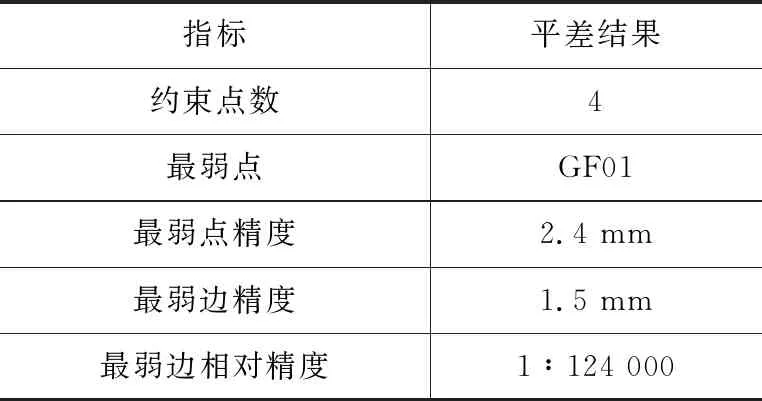
二維約束平差結果 表2
各項精度指標均滿足規范要求。
3 陀螺定向測量
陀螺經緯儀(全站儀)主要是利用陀螺自身的物理特性以及地球自轉的影響,來實現快速測定真北方位的功能,且不受外界條件限制,與傳統測量相比,陀螺定向具有操作簡單、精度高及占用井筒和平巷時間少等優點[4],同時,在洞內導線的傳遞過程中,加測陀螺定向邊可以發現原有導線邊的水平方向的誤差[5],有利于減少測角誤差的累積,適合長距離隧道定向測量。本文所用陀螺儀為南方測繪所產的NTS-342G10型陀螺全站儀,尋北精度10″,尋北時間 ≤10 min。
3.1 基本的定向過程
本文應用的工程所在區間為杭富城際鐵路的汽車北站~高橋站的盾構區間,地上控制點為平面基準網中的SQ及LSY,即地面控制邊為:LSY→SQ。根據已知點數據可計算地上控制邊坐標方位角α上。通過二井定向進行聯系測量傳至井下,然后通過支導線向隧道內施測,地下待測邊為:T666→T927,由聯系測量及隧道內導線測量得出的數據可算出地下待測邊坐標方位角α下。
陀螺儀的基本定向過程為:
(1)在地面控制邊LSY→SQ進行3測回的陀螺定向測量;
(2)在地下待測邊T666→T927進行4測回陀螺定向測量,得出地下邊陀螺方位角αT下;
(3)再返回地面對控制邊LSY→SQ進行3測回的陀螺定向測量,以地面控制邊的兩次各3測回陀螺定向測量結果的均值為地上邊陀螺方位角αT上,檢驗儀器的穩定性和精度并最終確定儀器常數,確保陀螺定向成果準確可靠。
3.2 待測邊坐標方位角的計算
地面標定儀器常數△為:
△=α上-αT上
(1)
則地下待測邊坐標方位角α下的計算公式為
α下=αT下+△+δ
(2)
式中:α上為地面控制邊坐標反算方位角;
αT上為地面控制邊實測陀螺方位角;
αT下為地下待測邊實測陀螺方位角;
δ為地面已知邊和待定邊子午線收斂角差數,單位為秒,其計算公式為[6]:
(3)
式中:B為測區當地緯度;
y下為地下待定邊端點的橫坐標(km);
y上為地面已知邊端點的橫坐標(km)。
4 算例分析
汽車北站~高橋站的盾構區間全長約 1 880 m,采用盾構單向掘進,大里程端始發,小里程端接收,在陀螺定向之前剛進行過一次聯系測量及洞內導線測量。平面基準網平差所得地面控制點SQ及LSY及導線測量所得T666及T927成果如表3所示:
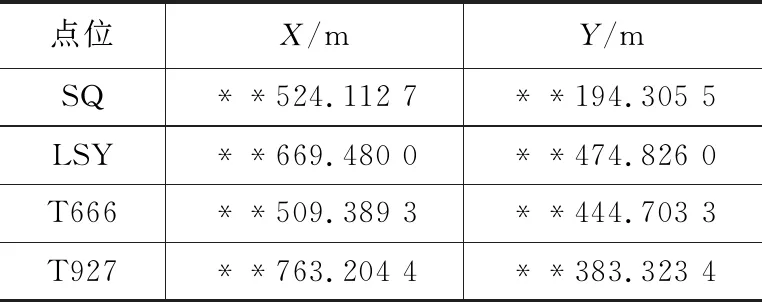
已知點及待測點坐標成果 表3
4.1 陀螺定向測量數據分析
陀螺儀所測地上地下控制邊的數據如表4~表6所示:
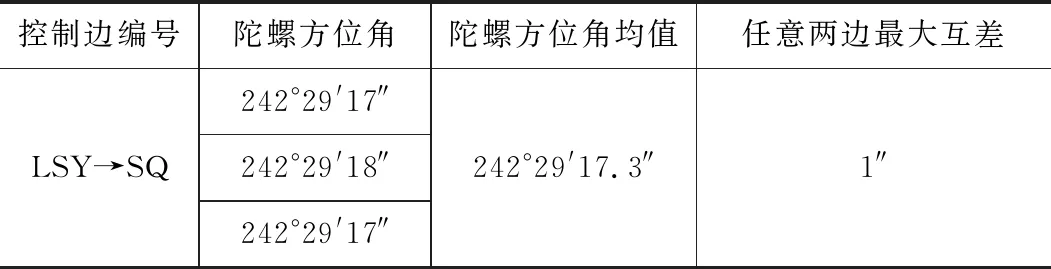
第一次地上邊陀螺定向結果 表4
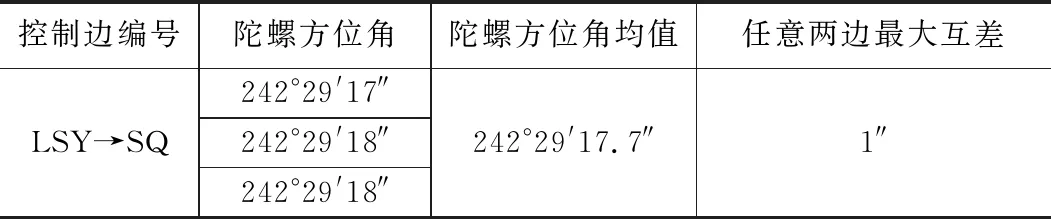
第二次地上邊陀螺定向結果 表5
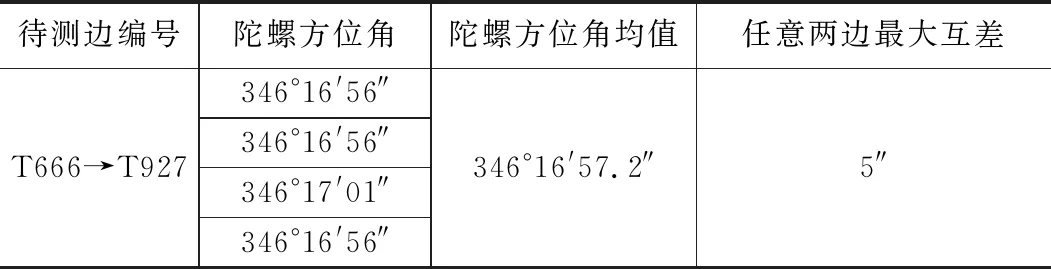
地下邊陀螺定向結果 表6
根據已知點及待測點坐標成果計算得知地上控制邊LSY→SQ坐標方位角為:α上=242°36′23.6″,地下待測邊T666→T927坐標方位角為:α下=346°24′8.8″。由式(1)、式(2)、式(3)計算可得陀螺儀測出的待測邊T666→T927坐標方位角為:346°24′3.9″。可得陀螺方位角較差為4.9″。
在《城市軌道交通工程測量規范》(GB/T 50308-2017)中規定:當隧道單向掘進超過 1.5 km時應加測陀螺邊,使用的陀螺儀標稱精度不低于15″,陀螺方位角較差不大于20″[7]。以上結果表明陀螺儀定向測量結果良好,也說明作為支導線起算點的地上已知控制點的絕對精度很好。
4.2 貫通精度及結果分析
在隧道貫通之后,對該隧道進行平面貫通測量,首先定貫通面附近的點T1432為貫通點,兩端各向其測支導線進行貫通測量,施測后的貫通誤差如表7所示:

平面貫通點誤差計算 表7
然后再進行全線的附合導線測量,附合導線略圖如圖2所示:
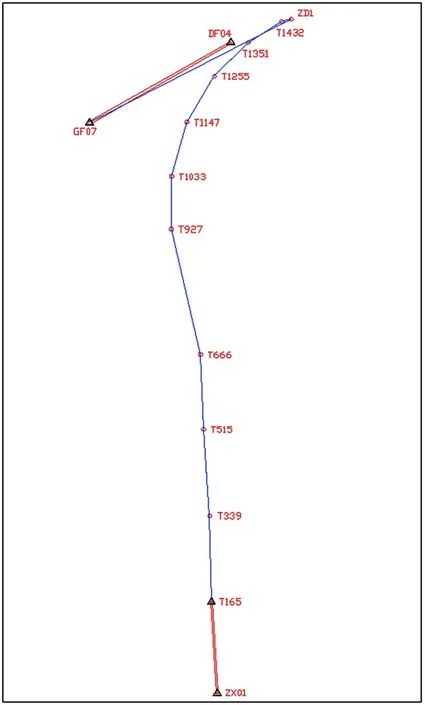
圖2 附合導線略圖
經計算后附合導線的主要精度指標如表8所示:

貫通后附合導線精度 表8
由表7和表8可以看出,該隧道貫通精度良好,且貫通之后聯測的附合導線的主要精度指標都在限差范圍以內,這說明隧道兩端的已知點相對精度良好。
5 結 論
通過在杭州汽車北站~高橋站的盾構區間的實際測量結果可得出如下結論:①以CORS為起算點的基準網可有效保證線路局部區間隧道兩端地上控制點的相對精度和絕對精度,這可以有效保證盾構隧道的貫通精度。②陀螺全站儀在長隧道的掘進過程中可以對地下導線邊做有效的檢核,可作為隧道定向測量的重要輔助手段。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00