基于捷聯慣導系統的車載導彈動態快速對準技術
2021-09-04 07:44:44應智慧吳學科姜永旺王宏剛高春峰
導航與控制 2021年3期
關鍵詞:系統
應智慧,吳學科,姜永旺,王宏剛,高春峰
(1.96723部隊,柳州 545616;2.國防科技大學前沿交叉學科學院,長沙 410073)
0 引言
在導彈武器系統的發射準備過程中,彈載慣導系統的初始對準占據了發射準備的大部分時間。慣導系統的初始對準是指在系統進入導航工作前必須確定慣導系統慣性測量單元(Inertial Measurement Unit,IMU)載體系和地理系的初始姿態矩陣[1-2]。慣導系統初始對準要求用盡可能少的耗時精確地給出載體系到導航系的初始姿態矩陣,為隨后的姿態更新提供初始條件。因此,通過縮短慣導初始對準時間以快速完成導彈的發射準備對提高導彈武器系統的生存概率具有重要的意義[3-6]。
動態快速對準是縮短慣導系統初始對準時間的有效方法,相關技術可以實現發射車在高速移動狀態下彈體IMU的初始對準,此項技術已經被美國、俄羅斯成熟用于多型導彈中。目前,國內動態傳遞對準的應用主要集中于機載武器裝備中,在車載導航的快速對準方面尚未有具體應用[7-11]。本文基于捷聯慣導系統的陸基導彈行進間快速對準技術為研究對象,從動基座傳遞對準方法入手,建立了系統的誤差模型,對多種動態情況下的子系統對準性能進行分析和評估,給出了最優對準方案。
1 車載陸基導彈的動態快速對準方案論證
陸基導彈發射車車載主慣導安裝在車架中,采用相對精度較高的捷聯慣導系統,同時與衛星、里程計等外界測量設備進行組合導航,具有相對較高的導航精度,并且具備在靜態狀態下的快速自對準和動態情況下的濾波對準能力。
與主慣導相比,彈體上安裝的捷聯慣導系統采用中低精度慣導,其自對準精度受到慣導系統自身精度的限制。因此,動基座傳遞對準是實現陸基導彈的動態高精度對準的理想方案。傳遞對準的基本流程依次為粗對準、精對準和姿態修正。在粗對準階段,主慣導將導航結果通過安裝關系直接傳遞給子慣導。精對準階段通過主子慣導分別解算出的導航信息建立狀態方程和測量方程,通過對傳遞對準誤差模型的分析給出濾波器的誤差傳遞矩陣,即可利用最優估計濾波器對子慣導的一些誤差參數(如失準角)進行估計。最后,通過得到的誤差參數對子系統的輸出姿態進行誤差補償即姿態修正,完成對準過程。傳遞對準的基本工作流程如圖1所示。
其中,動態傳遞對準需要解決的主要問題包括以下幾點:
1)傳遞對準的誤差建模;
2)傳遞對準的匹配方式;
3)系統的可觀性;
4)相關誤差補償。

圖1 動態傳遞對準基本工作流程Fig.1 Basic workflow of dynamic transfer alignment
下面章節將針對車載導彈的特點對其動態快速傳遞對準需要解決的主要問題進行研究,針對陸基導彈發射車傳遞對準的實際應用環境,建立最優相關誤差模型,確定傳遞對準匹配方式,選擇最優濾波方法,對載車多種動態情況下彈體姿態對準的精度進行探究。
2 車載陸基導彈的動態傳遞對準算法設計
匹配方式是指濾波器量測方程中相關參數的選取方式,按觀測信息的類型可分為計算參數匹配和測量參數匹配。計算參數匹配法就是將主子慣導輸出的測量信息進行解算,將得到的速度、位置、姿態代入量測方程中進行匹配;而測量參數匹配法則是將主子系統的輸出信息直接匹配。
計算參數匹配法存在對慣導直接輸出的測量信息進行積分的一個過程,因此該方法在對準速度上略慢于測量參數匹配法。但由于積分過程有一定的平滑作用,因此可以對撓曲變形、載體振動等噪聲干擾起到一定的抑制,從而提高對準精度。測量參數匹配法對外界擾動較為敏感,因此當載體機動能力有限時這種匹配方式比較有利于快速傳遞對準。可見,這兩種類型的匹配方法各有優劣,實際應用時應當視具體情況選擇合適的匹配方法。匹配量的選取主要有速度匹配、角速度匹配、位置匹配、姿態角匹配等方式。
針對武器系統的主子慣導安裝情況和對準需估計的相關量進行分析,本文使用基于地理系的慣導系統誤差模型,認為陀螺和加速度計的噪聲為白噪聲,系統的狀態方程如下

系統的觀測方程為

狀態方程變量為

狀態方程包括:1)子系統的三個姿態誤差φ=[φEφNφU]、 東向和北向速度誤差δV=[δVEδVNδVU]; 2)導航系中等效三個陀螺漂移
由慣導系統及傳遞對準的誤差模型,可以得到系統的狀態轉移矩陣F
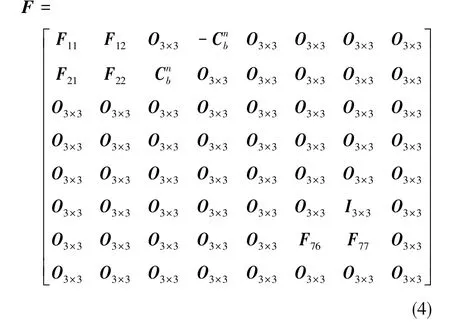
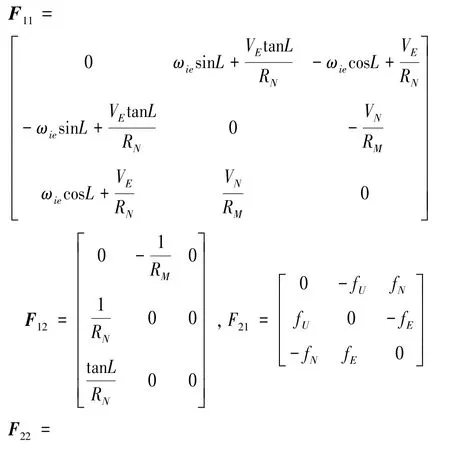
式(4)中,

噪聲驅動矩陣為
噪聲向量為

在采用“姿態+速度”匹配的方式下,采用載車的主慣導與彈體子慣導的姿態誤差和速度誤差為濾波器的觀測值,考慮到兩系統的安裝誤差、撓曲形變誤差和桿臂誤差,可以得到觀測方程為

通過設置合理的濾波參數,即可實現對子慣導的姿態及其他相關導航結果和參數的誤差估計。
3 車載陸基導彈的動態傳遞對準仿真分析
陸基導彈發射車在行進中存在多種動態情況,車體行進狀態包括直行、轉彎、上下坡,車體受到路面顛簸還會有振動。不同的運動狀態會對濾波器產生不同的激勵,會間接導致所設計的傳遞對準濾波器的對準精度和對準時長的不同。在前文對誤差模型和對準方法以及濾波器相關分析的基礎上,本節針對載車的不同運動狀態對傳遞對準精度的影響進行仿真分析。結合目前國內捷聯慣導系統平均對準精度等指標,設置主慣導和子慣導的相關參數,如表1所示。

表1 傳遞對準仿真的相關器件參數Table 1 Related device parameters of transfer alignment simulation
3.1 靜止和勻速直線運動狀態下的傳遞對準仿真
靜止和勻速直線運動是車輛最常見的運動狀態,這兩種狀態下慣導系統的陀螺和加速度計敏感量基本不變,因此對于對準濾波器的激勵是相同的,在此作為一種狀態進行分析。
首先,對載車靜止狀態下的傳遞對準結果進行分析。設載車所在地的經度、緯度、高度分別為λ=112.993°、L=28.222°、h=380m,在靜態情況下進行傳遞對準仿真,靜止狀態下陀螺和加速度計的輸出如圖2、圖3所示。
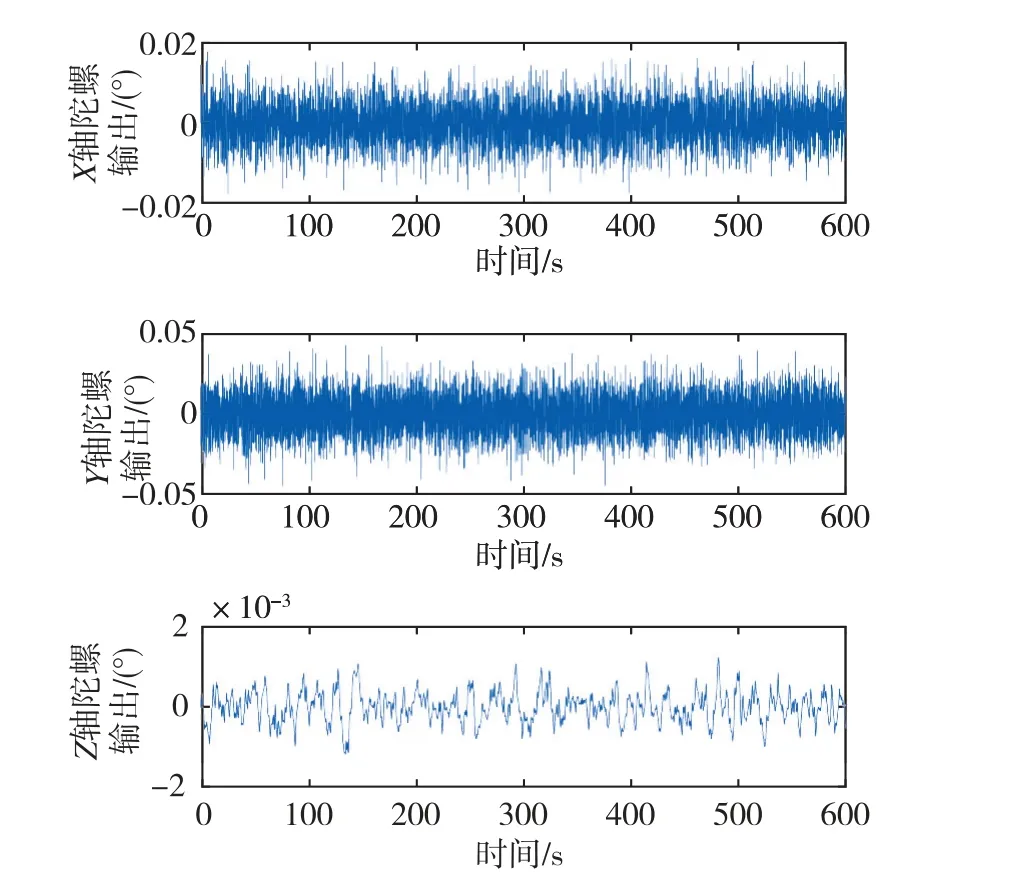
圖2 靜止狀態下陀螺的輸出Fig.2 Diagram of gyroscope output under static condition
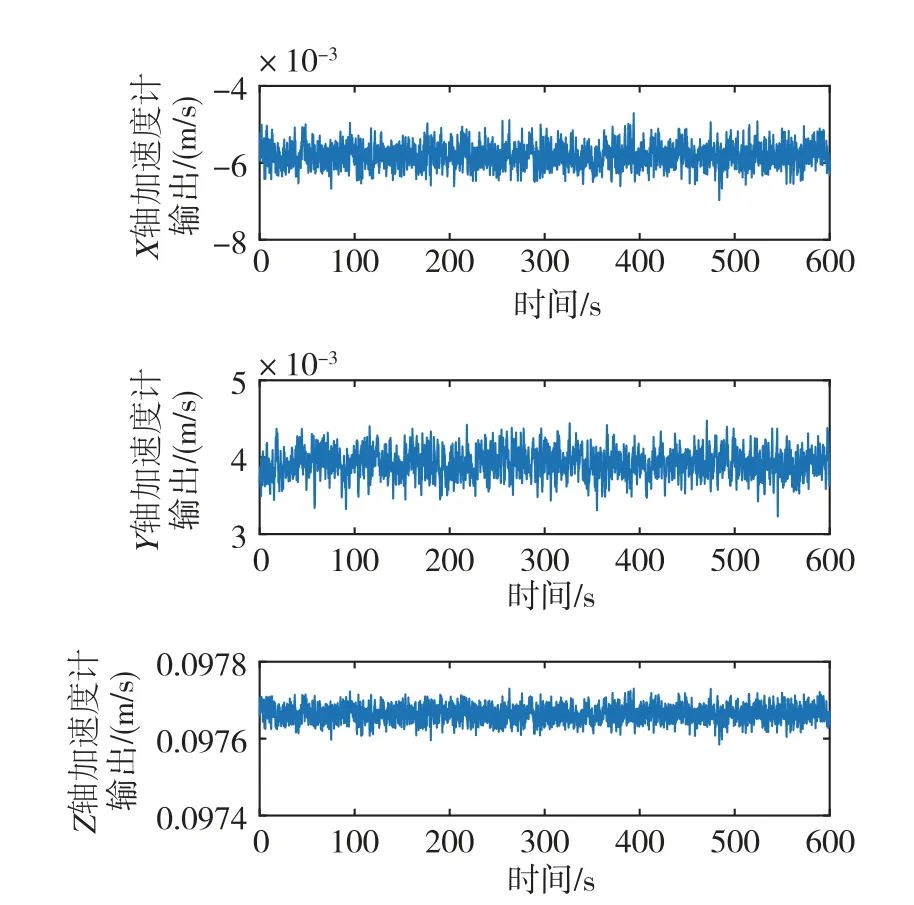
圖3 靜止狀態下加速度計的輸出Fig.3 Diagram of accelerometer output under static condition
對準過程中子系統的對準姿態結果如圖4所示。
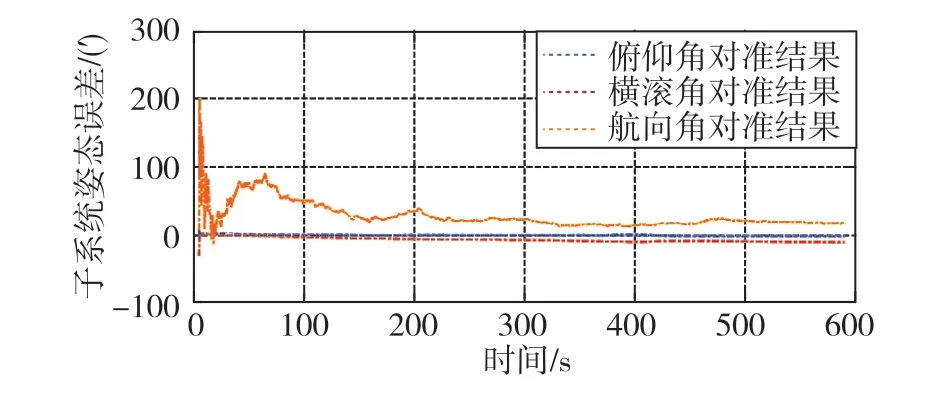
圖4 靜止狀態下傳遞對準子系統姿態誤差估計值收斂過程Fig.4 Convergence process of subsystem attitude error estimation under static condition
在靜態狀態下,采用“姿態+速度”匹配的傳遞對準方式,其兩個水平姿態誤差的收斂速度較快,航向角對準誤差的收斂速度較慢,對準300s之后其結果才趨于收斂,并且后續姿態結果具有較大振蕩。在600s對準結束后,系統俯仰角對準誤差為-3.76′,橫滾角對準誤差為-12.64′,航向角對準誤差為16.43′。可見靜止狀態下,由于系統缺乏激勵,對準過程收斂較慢且對準誤差相對較大。
3.2 加/減速交替狀態下的傳遞對準仿真
當發射車處于加/減速交替狀態下,由加速度計敏感加速度變化實現對傳遞對準的姿態激勵。設載車初始速度為V0=[0 0 0]T,初始姿態為At t0=[0 0 0]T, 載車以1.5m/s2的加速度沿直線加速行駛10s后,再以0.5m/s2的加速度減速行駛10s,如此交替往復,行駛60s后陀螺和加速度計的輸出如圖5、圖6所示。

圖5 加/減速交替狀態下陀螺的輸出Fig.5 Diagram of gyroscope output under acceleration/deceleration alternate condition
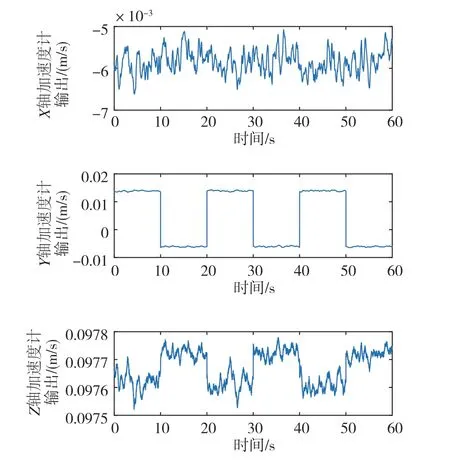
圖6 加/減速交替狀態下加速度計的輸出Fig.6 Diagram of accelerometer output under acceleration/deceleration alternate condition
在載車運動開始時即進行傳遞對準,對準結果如圖7所示。
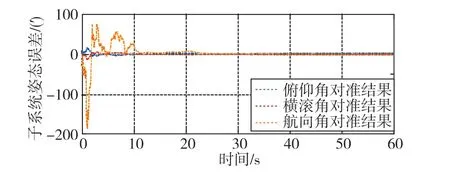
圖7 加/減速交替狀態下傳遞對準子系統姿態誤差估計值收斂過程Fig.7 Convergence process of subsystem attitude error estimation under acceleration/deceleration alternate condition
在加/減速交替狀態下,載車在第一個10s加速結束后進入減速過程,俯仰角對準誤差、橫滾角對準誤差和航向角對準誤差均快速收斂,在一個加減速周期結束后(20s后),三個誤差量迅速收斂。在對準25s左右,三個姿態角完全收斂,此時姿態修正后的結果為:系統俯仰角對準誤差為1.58′,橫滾角對準誤差為-2.42′,航向角對準誤差為0.22′。由對準結果可知,系統的收斂速度明顯較單純加/減速狀態下收斂速度更快,對準時長較靜態狀態下減少了一個數量級左右,且對準精度明顯提高,尤其是航向角的對準精度提高尤為明顯。
3.3 S形行進狀態下的傳遞對準仿真
當載車在路面以S形方式行進時(即載車在進行S形機動),陀螺敏感載車角轉動的變化實現對傳遞對準的姿態激勵。設載車在50s之前勻速行駛,在50s時進行時長為20s的±1(°)/s的S形機動,如此交替往復,行駛140s后陀螺和加速度計的輸出如圖8、圖9所示。

圖8 S形行進狀態下陀螺的輸出Fig.8 Diagram of gyroscope output under S-shaped moving condition
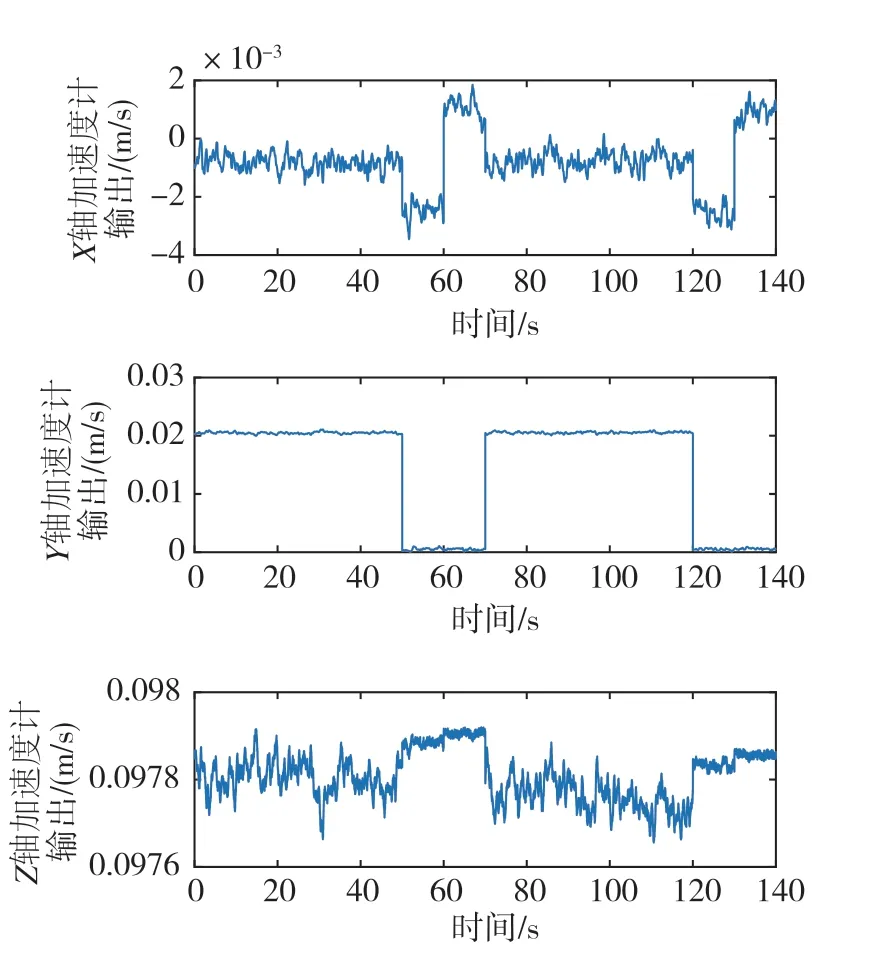
圖9 S形行進狀態下加速度計的輸出Fig.9 Diagram of accelerometer output under S-shaped moving condition
S形機動的傳遞對準結果如圖10所示。
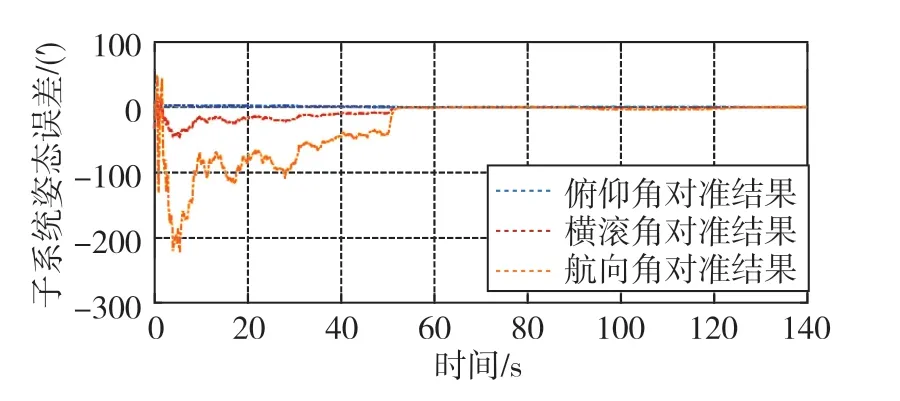
圖10 S形行進狀態下傳遞對準子系統姿態誤差估計值收斂過程Fig.10 Convergence process of subsystem attitude error estimationunder S-shaped moving condition
由圖10可知,載車在50s時進入S形機動狀態,在50s左右三個姿態誤差量有明顯的收斂過程,在轉動開始時姿態就迅速收斂到小量,說明載車在由直線行駛進入轉動的過程對傳遞對準的姿態誤差具有很大的激勵作用。在140s第二次機動完成后,最終姿態修正后的結果為:系統俯仰角對準誤差為0.176′,橫滾角對準誤差為-0.135′,航向角對準誤差為1.440′。可以認為,當載車在剛完成S形機動狀態下,傳遞對準的姿態誤差處于小量,當系統重新進行勻速直線運動時,會導致對準精度的降低。
在陸基導彈發射車的實際工作過程中,S形機動是一種很容易實現的運動方式,可以在短時間內完成,且受車輛所在場地限制小,因此可以認為這種激勵方式具有很高的可操作性。
通過以上多種運動狀態下的仿真,可以總結如下:所設計的動態傳遞對準方法可行,在載車處于機動狀態下,對準5min以內濾波器估計姿態誤差收斂。在載車處于加/減速交替行進和S形機動狀態下,其效果最好。因此在實際工作過程中,可以通過刻意駕駛車輛進行相關機動方式,以縮短對準時間、提高對準精度。
4 行進間快速傳遞對準動態跑車實驗
實驗設備主要包括:高精度激光陀螺捷聯慣導系統(作為主慣導)、低精度激光陀螺捷聯慣導系統(作為子慣導)、車載GPS(定位精度10m以內)、導航計算機、不間斷電源。其中,主慣導安裝在載車后部,子慣導安裝在載車中部,兩慣導系統均采用螺釘直接固定于車內地板,以確保兩系統在短時間內相對姿態的穩定。
主子慣導系統安裝完成后,通過兩系統在實驗車內的長時間高精度對準,完成了兩系統之間的安裝誤差測量(兩慣導之間存在(1.3221°,2.4215°,7.3290°)安裝誤差)和桿臂補償。整體實驗通過主慣導與GPS組合的方式給出相對準確的姿態、速度和位置,相關測量值通過兩系統的安裝誤差矩陣轉換后作為子系統的基準量。由于載車不可避免出現形變,因此此種方式給出的姿態參考基準必定存在誤差。在本章節中,也結合了子慣導傳遞對準后一段時間的純慣性導航結果間接反映系統的對準精度。
跑車實驗在湖南長沙開展,跑車全程路線如圖11所示。
實驗全程主慣導陀螺和加速度計的輸出如圖12所示,子慣導陀螺和加速度計的輸出如圖13所示。

圖12 行進間快速傳遞對準實驗主慣導慣性器件輸出Fig.12 Outputs of main-INS sensors in dynamic transfer alignment experiment
實驗全程主慣導采用位置組合導航的方式,全程主慣導系統的姿態、速度以及定位結果如圖14所示。
主慣導對準完成后,實驗車由(113.1204°,28.2947°)位置出發向東北方向行駛,然后掉頭,全程經過多次加/減速、轉彎等機動模式,最終在(113.1318°,28.2269°)位置停車,全程實驗時長近60min。

圖11 行進間快速傳遞對準實驗路線Fig.11 Diagram of dynamic transfer alignment experiment route
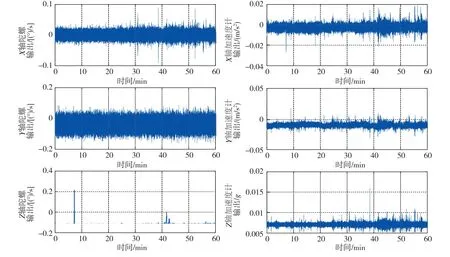
圖13 行進間快速傳遞對準實驗子慣導慣性器件輸出Fig.13 Output of sub-INS sensors in dynamic transfer alignment experiment
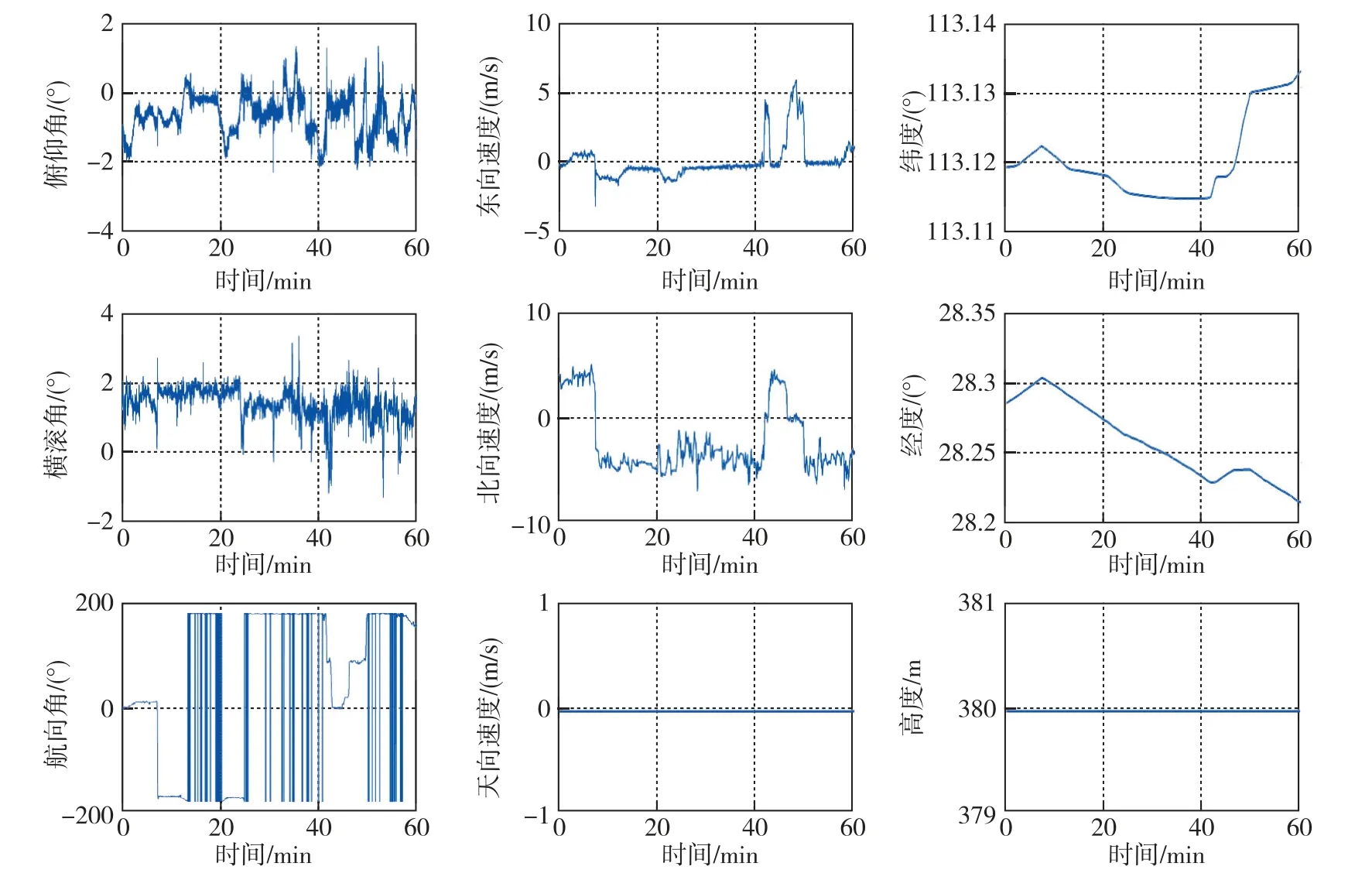
圖14 行進間快速傳遞對準實驗主慣導輸出導航結果Fig.14 Navigation results of main-INS in dynamic transfer alignment experiment
4.1 勻速狀態下的動態傳遞對準結果
載車從開始出發后進行第一次動態對準,對準時長為50s,載車在此段時間內接近直線行駛,速度輸出如圖15所示。
由圖15可知,在此段時間內,實驗車接近勻速行駛。對準過程中的主慣導純慣性輸出姿態如圖16所示,傳遞對準濾波器估計子慣導姿態誤差如圖17所示。
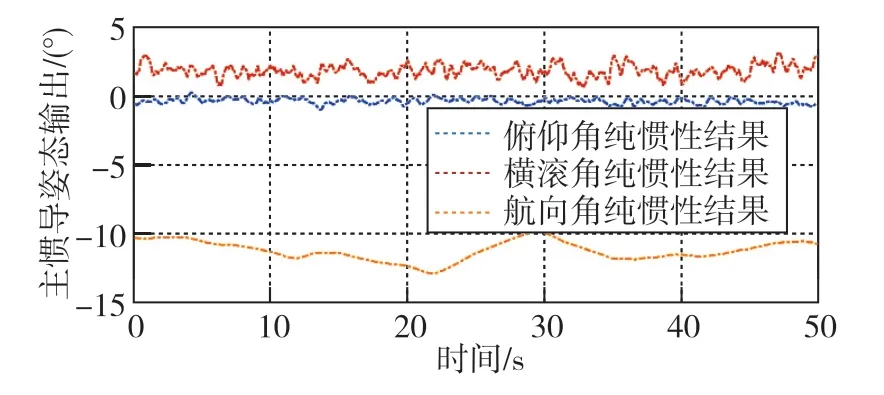
圖16 勻速狀態下主慣導純慣性輸出姿態Fig.16 Attitude of main-INS under constant speed condition
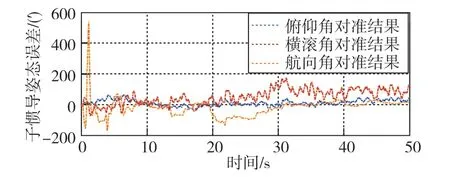
圖17 勻速狀態下傳遞對準濾波器估計子慣導姿態誤差Fig.17 Filter estimator error of sub-INS under constant speed condition
由對準結果可知,在對準初期濾波器對三個姿態誤差的估計值迅速收斂。對準50s后,子慣導的相對姿態誤差為:俯仰角46.3987′,橫滾角124.8458′,航向角19.9414′。對準完成后,子系統進行10min純慣性導航,系統純慣性輸出的定位誤差如圖18所示。
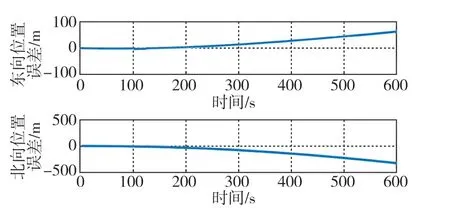
圖18 勻速狀態下子慣導純慣性導航定位誤差結果Fig.18 Positioning error of sub-INS under constant speed condition
系統行進間對準后進入導航10min,東向定位誤差最大值為62.2m,北向定位誤差最大值為-315.4m。
4.2 轉彎狀態下的動態傳遞對準結果
實驗車的運動路徑存在多次轉彎及掉頭設計,以驗證行進間快速傳遞對準在轉彎狀態下的對準精度。首先,采用載車在4.5min時的掉頭過程進行行進間傳遞對準分析,載車在對準過程中的速度如圖19所示。
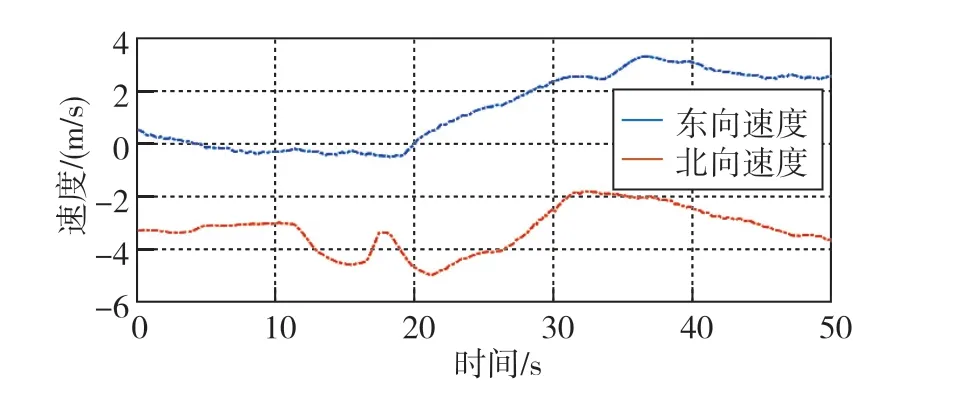
圖19 轉彎狀態下實驗車的運行速度Fig.19 Velocity of test vehicle under turning condition
由圖19可知,在50s的對準過程中,載車由向北行駛掉頭開始向南行駛,掉頭動作在對準進行至23s左右時開始。傳遞對準50s中,主慣導的輸出姿態如圖20所示,傳遞對準濾波器估計姿態誤差如圖21所示。
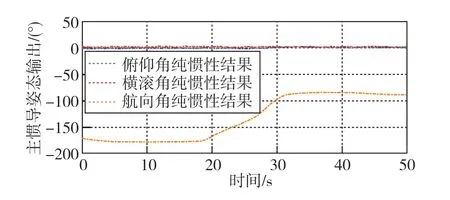
圖20 轉彎狀態下主慣導純慣性輸出姿態Fig.20 Attitude of main-INS under turning condition
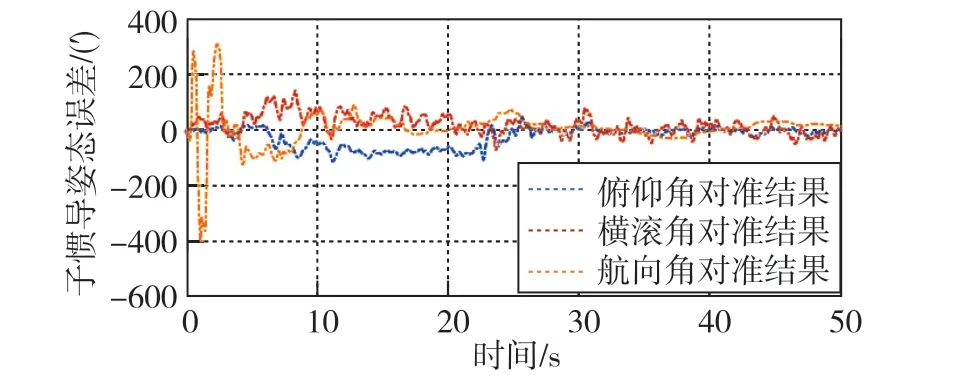
圖21 轉彎狀態下傳遞對準濾波器估計子慣導姿態誤差Fig.21 Filter estimator error of sub-INS under turning condition
由圖20和圖21可知,在對準的前23s,系統處于勻速直線行駛狀態,行進間對準的輸出姿態誤差量級和4.1節中勻速直線行駛狀態下的對準姿態誤差量級接近,且姿態輸出有接近100′左右的振蕩。在23s掉頭后,三個姿態角誤差明顯進一步收斂,輸出姿態的振蕩明顯減小,尤其是俯仰角和航向角的振蕩誤差都在20′以內,最終50s后對準結果如下:俯仰角誤差為3.366′,橫滾角誤差為1.741′,航向角誤差為16.750′。三個姿態誤差明顯小于4.1節中勻速行駛過程中的對準結果,可以認為對準過程中的掉頭動作可以有效激勵傳遞對準中的姿態誤差,提高對準收斂時間和對準精度。為進一步驗證對準姿態精度,采用對準完成后10min的數據進行純慣性導航驗證,結果如圖22所示。
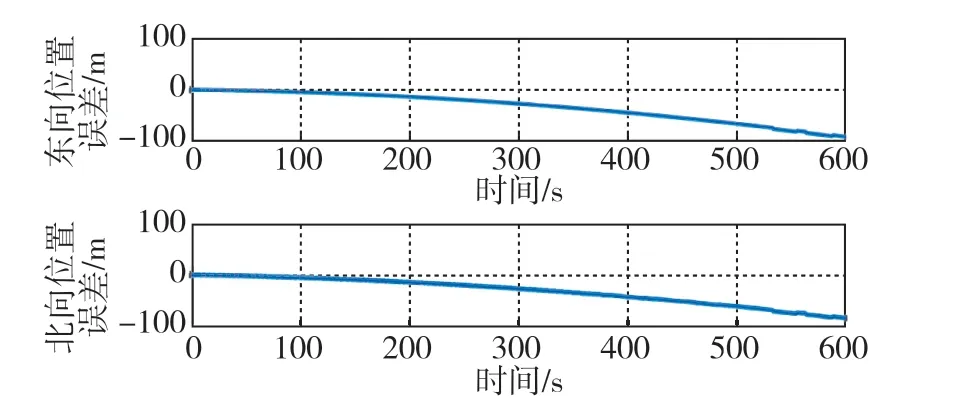
圖22 轉彎狀態下子慣導純慣性導航定位誤差結果Fig.22 Positioning error of sub-INS under turning condition
子慣導純慣性導航10min,東向定位誤差最大值為-91.397m,北向定位誤差最大值為-84.169m,定位精度明顯優于4.1節中的導航結果。因此從對準后的導航驗證中,同樣可以得到轉彎對行進間傳遞對準具有有效的激勵作用。
4.3 加/減速狀態下的動態傳遞對準結果
車載實驗存在多次車輛加/減速過程,為驗證在加/減速過程中行進間快速傳遞對準的效果,在實驗進行了27.5min時對實驗車加/減速過程進行傳遞對準,實驗車的速度如圖23所示。
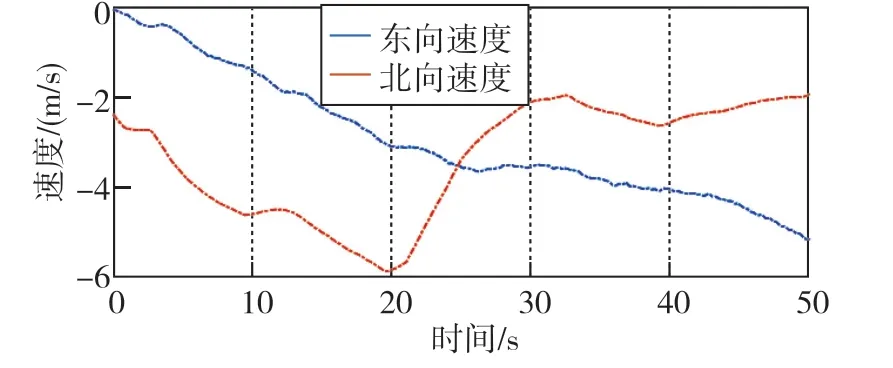
圖23 加減速交替狀態下實驗車的運行速度Fig.23 Velocity of test vehicle under acceleration/deceleration alternate condition
傳遞對準50s中,主慣導的輸出姿態如圖24所示,傳遞對準濾波器估計姿態誤差如圖25所示。
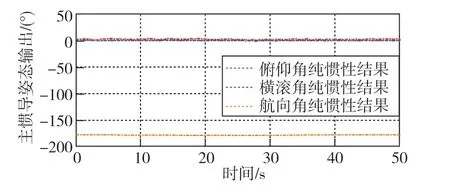
圖24 加減速交替狀態下主慣導純慣性輸出姿態Fig.24 Attitude of main-INS under acceleration/deceleration alternate condition
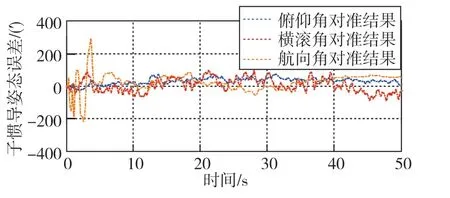
圖25 加減速交替狀態下傳遞對準濾波器估計子慣導姿態誤差Fig.25 Filter estimator errorof sub-INS under acceleration/deceleration alternate condition
傳遞對準50s過程中,載車前20s處于加速狀態,20s~30s處于減速狀態,加速度在0.15m/s2左右。對準姿態誤差很快趨于收斂,三個姿態角對準結果如下:俯仰角姿態誤差為8.7400′,橫滾角姿態誤差為-3.3424′,航向角姿態誤差為50.6637′。采用對準結果進行10min純慣導導航驗證,結果如圖26所示。
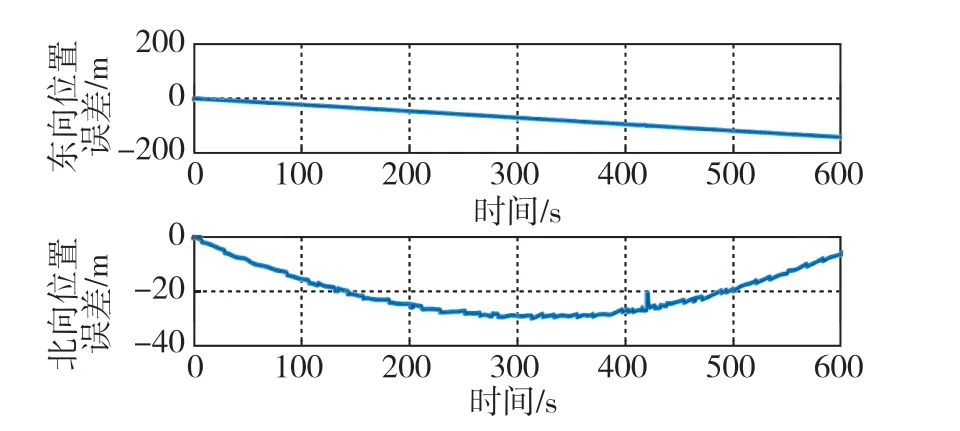
圖26 加減速交替狀態下子慣導純慣性導航定位誤差結果Fig.26 Positioning error of sub-INS under acceleration/deceleration alternate condition
純慣性導航10min,東向定位誤差最大值為-141.2570m,北向定位誤差最大值為-30.0435m。由導航結果可知,對準姿態角誤差優于勻速狀態下結果,但由于車載狀態下加速度較慢,因此激勵效果不明顯。
5 結論
本文針對陸基導彈發射車動態傳遞對準的實現方案進行了研究,對對準方案、誤差建模以及補償方法進行了分析,確定了對準匹配方式,完成了濾波器的搭建,并通過模擬載體不同運動狀態下的慣導輸出,對所設計的傳遞對準算法進行了仿真分析,提出了相應的陸基導彈發射車在對準過程中的運動方式,用以提高對姿態誤差的激勵。本文綜合考慮了不同運動狀態下的動態傳遞對準效果,驗證了所設計的行進間快速對準方案的可行性和精度。由實驗結果可知,載車在加/減速和轉彎狀態下可以在50s內實現子慣導系統的有效對準,相關實驗結果和仿真結果基本吻合。因此可以認為,在陸基巡航導彈實際行進間傳遞對準過程中,通過載車適當進行加/減速和轉彎等機動動作,可以有效提高彈體的對準精度,實現彈體在短時間內的高精度對準。通過理論分析、仿真和實驗驗證,本方案具備可行性,能夠保證在高精度導航的條件下快速完成初始對準,能夠有效縮短車載陸基導彈發射準備時間,優化發射流程,提高其生存概率,對作戰部隊實現快速發射、提升作戰效力具有積極意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32