考慮級聯(lián)失效的可重構(gòu)網(wǎng)絡(luò)抗毀性研究
2021-09-07 02:02:00朱文金王羅昊佶蔡志強司書賓白光晗
西北工業(yè)大學(xué)學(xué)報 2021年4期
關(guān)鍵詞:實驗
朱文金, 王羅昊佶, 蔡志強, 司書賓, 白光晗
(1.西北工業(yè)大學(xué) 機(jī)電學(xué)院, 陜西 西安 710072; 2.國防科技大學(xué) 裝備綜合保障技術(shù)重點實驗室, 湖南 長沙 410073)
許多系統(tǒng)都可以抽象為復(fù)雜網(wǎng)絡(luò)模型,隨著復(fù)雜網(wǎng)絡(luò)的研究逐步深入,網(wǎng)絡(luò)級聯(lián)失效行為[1]和可重構(gòu)網(wǎng)絡(luò)[2]由于其現(xiàn)實意義受到廣泛關(guān)注。網(wǎng)絡(luò)中一個或多個節(jié)點發(fā)生的故障,會通過節(jié)點之間的連接關(guān)系引起其他節(jié)點發(fā)生故障,連鎖效應(yīng)最終導(dǎo)致大部分甚至整個網(wǎng)絡(luò)崩潰,這種現(xiàn)象稱為級聯(lián)失效,在交通網(wǎng)絡(luò)、Internet、電網(wǎng)、無人機(jī)集群等都存在這種現(xiàn)象。級聯(lián)失效的出現(xiàn)讓原本具有高關(guān)聯(lián)度的網(wǎng)絡(luò)設(shè)計難度加大。在進(jìn)行網(wǎng)絡(luò)結(jié)構(gòu)初始設(shè)計時,不僅要考慮到可能面臨沖擊的規(guī)模和形式,還要考慮節(jié)點間關(guān)聯(lián)度以及失效節(jié)點的負(fù)載分配[3]與重構(gòu)。因此,針對級聯(lián)失效行為及網(wǎng)絡(luò)可重構(gòu)特性進(jìn)行分析具有重大意義。
近年來,無人機(jī)的協(xié)同作戰(zhàn)及對抗受到較多關(guān)注。無人機(jī)自組網(wǎng)設(shè)計是未來無人機(jī)集群作戰(zhàn)的重要研究內(nèi)容。現(xiàn)有的無人機(jī)集群通訊大多采用自組織網(wǎng)絡(luò)(無人機(jī)Ad hoc網(wǎng)絡(luò))[4],其特點在于不完全依賴于地面控制站或者衛(wèi)星等固定基礎(chǔ)通信設(shè)施。每臺無人機(jī)都可作為移動網(wǎng)絡(luò)節(jié)點,各節(jié)點依靠無線通信設(shè)備模塊實現(xiàn)無線通信的自主管理。而無人機(jī)集群網(wǎng)絡(luò)對數(shù)據(jù)信息的可靠高速傳輸有較高要求,但囿于成本和Ad hoc網(wǎng)絡(luò)無線多跳路由、網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)多變、帶寬有限等特性,無法具有基礎(chǔ)設(shè)施網(wǎng)絡(luò)中較為穩(wěn)定的通訊能力和較大的帶寬設(shè)置。因此,基于無人機(jī)自組織網(wǎng)絡(luò)發(fā)展現(xiàn)狀和一般通用失效模式的假設(shè),建立通訊模塊故障造成的級聯(lián)失效模型,并分析和評估無人機(jī)通訊網(wǎng)絡(luò)的性能,具有重要的理論意義和應(yīng)用價值。
本文以無人機(jī)集群作為研究背景,該集群自身具有自組織、自適應(yīng)性,通訊采用無線通訊[5-6],是非常典型的可重構(gòu)網(wǎng)絡(luò)。在本文中無人機(jī)集群由作為節(jié)點的無人機(jī)和作為邊的信息交流通道組成。每個無人機(jī)判斷不斷變化的態(tài)勢并依據(jù)一定的準(zhǔn)則調(diào)整自己的策略,進(jìn)行友方個體間的合作、與敵方的博弈[7];從而無人機(jī)集群構(gòu)成了一個可重構(gòu)、針對特定任務(wù)具有級聯(lián)失效行為的網(wǎng)絡(luò)。
本文考慮級聯(lián)失效行為和可重構(gòu)網(wǎng)絡(luò)特點,引入節(jié)點最大連接數(shù)限制,提出了一種基于信息載荷分配的多狀態(tài)級聯(lián)失效規(guī)則與基于概率的動態(tài)網(wǎng)絡(luò)重連規(guī)則,研究級聯(lián)失效行為的擴(kuò)散和傳播對網(wǎng)絡(luò)抗毀性影響。
1 無人機(jī)集群網(wǎng)絡(luò)模型
1.1 無人機(jī)集群模型概述
Tran等[8]提出了無人機(jī)集群模型的3個場景:初始連接階段、打擊階段以及恢復(fù)重連階段,分別對應(yīng)打擊前、打擊完成瞬間、打擊之后修復(fù)。無人機(jī)集群受到攻擊有2種方式,分別是隨機(jī)移除和定向移除。采用偏好連接算法,進(jìn)行無標(biāo)度網(wǎng)絡(luò)的構(gòu)建。同時考慮網(wǎng)絡(luò)連接和重連的成本,對不同網(wǎng)絡(luò)連接模式進(jìn)行對比。假設(shè)給定初始完全連接的節(jié)點數(shù)為m0,一個新節(jié)點j與網(wǎng)絡(luò)中已有節(jié)點創(chuàng)建m條連接(m≤m0),則定義節(jié)點j與已有節(jié)點i連接概率為
(1)
式中:Nt代表t時刻網(wǎng)絡(luò)中現(xiàn)有節(jié)點數(shù);ki則表示節(jié)點i的現(xiàn)有連接數(shù),即節(jié)點的度。
在恢復(fù)重連階段,由于其余節(jié)點消失而失去連接的節(jié)點j與其他節(jié)點進(jìn)行連接的概率也如(1)式所示。在打擊階段,無標(biāo)度網(wǎng)絡(luò)對于隨機(jī)移除的攻擊模式抗性較高,但針對定向移除這種移除網(wǎng)絡(luò)中度值較高的打擊行為來說,無標(biāo)度網(wǎng)絡(luò)較為脆弱。
在上述研究基礎(chǔ)之上,Barthelemy[9]將距離因素引入連接概率模型中,基于等式(2)分別提出了不同的調(diào)整變量和距離函數(shù)。
Pj→i=θkiF(dj→i)
(2)
式中:θ表示調(diào)整因子;ki表示節(jié)點i的現(xiàn)有連接數(shù);F(·)為距離函數(shù),代表物理距離對于無人機(jī)集群間的連接狀況、信息傳輸?shù)挠绊懀籨j→i表示節(jié)點j與i之間的距離。
Bai等[6]考慮到無人機(jī)集群具有自組織、自適應(yīng)的特點,提出了新的模型:若在無人機(jī)集群中存在孤立節(jié)點或孤立分支,會降低集群的整體性能,并提出了連接概率等式(3)
Pj→i=α(ki+ε)F(dj→i)=
(3)
式中:Nt代表網(wǎng)絡(luò)中現(xiàn)有節(jié)點數(shù);ε代表節(jié)點度值的調(diào)整因子;ki表示節(jié)點i的現(xiàn)有連接數(shù)即節(jié)點度值。函數(shù)F(dj→i)如下所示:
(4)
1.2 加入最大連接數(shù)限制的改進(jìn)模型
以(1)式偏好連接算法生成的無標(biāo)度網(wǎng)絡(luò),不可避免地會出現(xiàn)某些度值非常高的節(jié)點,這些節(jié)點被稱為“Hub”節(jié)點[10]。面臨隨機(jī)移除時,“Hub”節(jié)點的重要程度并不突出;而定向打擊會定向移除網(wǎng)絡(luò)中度值較高的節(jié)點,“Hub”節(jié)點的移除造成集群性能大幅下降,恢復(fù)連接必須承受極高的經(jīng)濟(jì)代價和時間成本。
在無人機(jī)集群中,通訊效果是衡量集群工作能力的非常重要的一個指標(biāo)。現(xiàn)有的無人機(jī)集群間通訊模式難以做到大容量的機(jī)間信息分發(fā)和任意拓?fù)浣Y(jié)構(gòu)傳輸,壓縮了集群系統(tǒng)在理論上的最優(yōu)性能[5]。同時集群內(nèi)通訊存在多徑效應(yīng)[11-12]的影響,即多條信息在同一路徑傳播或單機(jī)同一時間接收到多條信息時,信息間就會相互產(chǎn)生一定程度的干擾或阻塞。
綜上所述,通過添加節(jié)點最大連接數(shù)限制能減少集群內(nèi)部通信阻塞,改變集群度分布。因此,本文提出考慮最大連接數(shù)限制的網(wǎng)絡(luò)構(gòu)建模型,其概率連接如(5)式所示
Pj→i=α(ki+ε)δF(dj→i)=
(5)
式中:最大連接數(shù)限制因子δ為ki<ξ的邏輯返回值;ξ是最大連接數(shù),即網(wǎng)絡(luò)中每個節(jié)點的度值ki都不應(yīng)該超過ξ;即節(jié)點i的連接數(shù)若未達(dá)到限制,則其與節(jié)點j便有非零概率建立連接;而F(dj→i)與(4)式的定義相同。

圖1 添加最大連接數(shù)限制前后網(wǎng)絡(luò)連接對比
本文提出的改進(jìn)模型(見圖2a))與文獻(xiàn)[6]模型(見圖2b))給出100個無人機(jī)節(jié)點完成初始連接時的情況。二者的主要差別具體體現(xiàn)在:①網(wǎng)絡(luò)分支數(shù)量;②網(wǎng)絡(luò)中節(jié)點的最大度與網(wǎng)絡(luò)平均度。

圖2 最大連接數(shù)限制對網(wǎng)絡(luò)結(jié)構(gòu)的影響
由于最大連接數(shù)的限制,改進(jìn)模型中不存在連接數(shù)超過3的節(jié)點,網(wǎng)絡(luò)中節(jié)點最大度值為3且平均度不超過3;而在文獻(xiàn)[6]模型中,網(wǎng)絡(luò)中節(jié)點最大度值達(dá)到了11,其平均度超過3。網(wǎng)絡(luò)中節(jié)點的最大度越小,面臨定向移除打擊時具有更好的魯棒性[13]。
2 級聯(lián)失效傳播及動態(tài)網(wǎng)絡(luò)重構(gòu)
2.1 級聯(lián)失效傳播形式
Motter與Lai[5]提出了一種基于負(fù)載重分配的級聯(lián)失效定義:
對一給定網(wǎng)絡(luò),其中任2個節(jié)點都可以通過二者間相互連接的最短路進(jìn)行信息或能量交換;每對節(jié)點的最短路徑經(jīng)過節(jié)點j的次數(shù)稱為節(jié)點j的負(fù)載Lj,同時定義節(jié)點的最大負(fù)載為這個節(jié)點的過載極限Cj。假設(shè)節(jié)點j的過載極限Cj與其初始負(fù)載 有如下關(guān)系
Cj=(1+μ)Lj,j=1,2,…N
(6)
式中,常數(shù)μ≥0為容差參數(shù),N為初始的節(jié)點數(shù)。
現(xiàn)有無人機(jī)集群多采用無線通訊作為主要通訊手段。在集群通訊網(wǎng)絡(luò)中,級聯(lián)失效[13]的機(jī)理是由于節(jié)點過載導(dǎo)致信息的分流,致使其他節(jié)點也有可能發(fā)生過載和分流現(xiàn)象;此效應(yīng)不斷傳播最終可能導(dǎo)致整個通訊網(wǎng)絡(luò)的癱瘓,使集群喪失工作能力。這樣的級聯(lián)失效行為通常會經(jīng)歷3個階段:外部擾動、負(fù)載分配、過載失效。
2.2 打擊事件場景構(gòu)建
無人機(jī)集群可能遭遇不同于傳統(tǒng)網(wǎng)絡(luò)定義的節(jié)點移除的打擊,存在被病毒、遠(yuǎn)程控制等手段劫持的可能;集群中可能會出現(xiàn)被劫持的無人機(jī),進(jìn)而影響與其連接的無人機(jī)。
基于通訊網(wǎng)絡(luò)的能量控制,通訊網(wǎng)絡(luò)中每單位信息的發(fā)送都存在一定能量限制。設(shè)置單位信息發(fā)送耗用的能量為pi,其具有一定的強度范圍
0≤pi≤bi
(7)
式中,bi為單位信息發(fā)送時能量耗損閾值,該值一般是根據(jù)集群面向的任務(wù)、所需求的通訊強度、續(xù)航時長等條件因素綜合預(yù)設(shè)的值。此閾值將會在正常無人機(jī)被劫持或失效時發(fā)生變化。
當(dāng)1臺無人機(jī)被劫持時,其對集群的影響有2種方式:①直接物理摧毀;②以遠(yuǎn)程控制或者注入病毒的方式修改通訊限制參數(shù)。對集群而言隨機(jī)失去單個節(jié)點對整個網(wǎng)絡(luò)影響不大,而通過修改限制參數(shù)bi使得集群因通訊而造成級聯(lián)失效則后果嚴(yán)重。
2.3 級聯(lián)失效在無人機(jī)集群網(wǎng)絡(luò)中的傳播
將無人機(jī)集群中的節(jié)點狀態(tài)劃分為4種:正常狀態(tài)G、死亡狀態(tài)D、失效狀態(tài)Y和被劫持狀態(tài)R,如表1所示。在一個時段[t,t+1]內(nèi),集群中節(jié)點的狀態(tài)一定且只會是該4種狀態(tài)中的一個;同時設(shè)定節(jié)點的狀態(tài)變遷是瞬間完成的,節(jié)點狀態(tài)變遷如圖3所示。
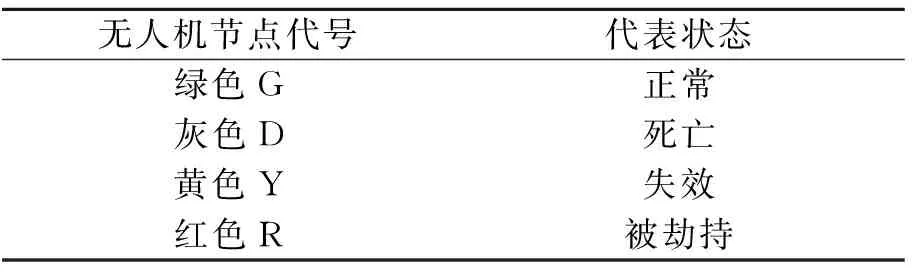
表1 無人機(jī)狀態(tài)及對應(yīng)代號
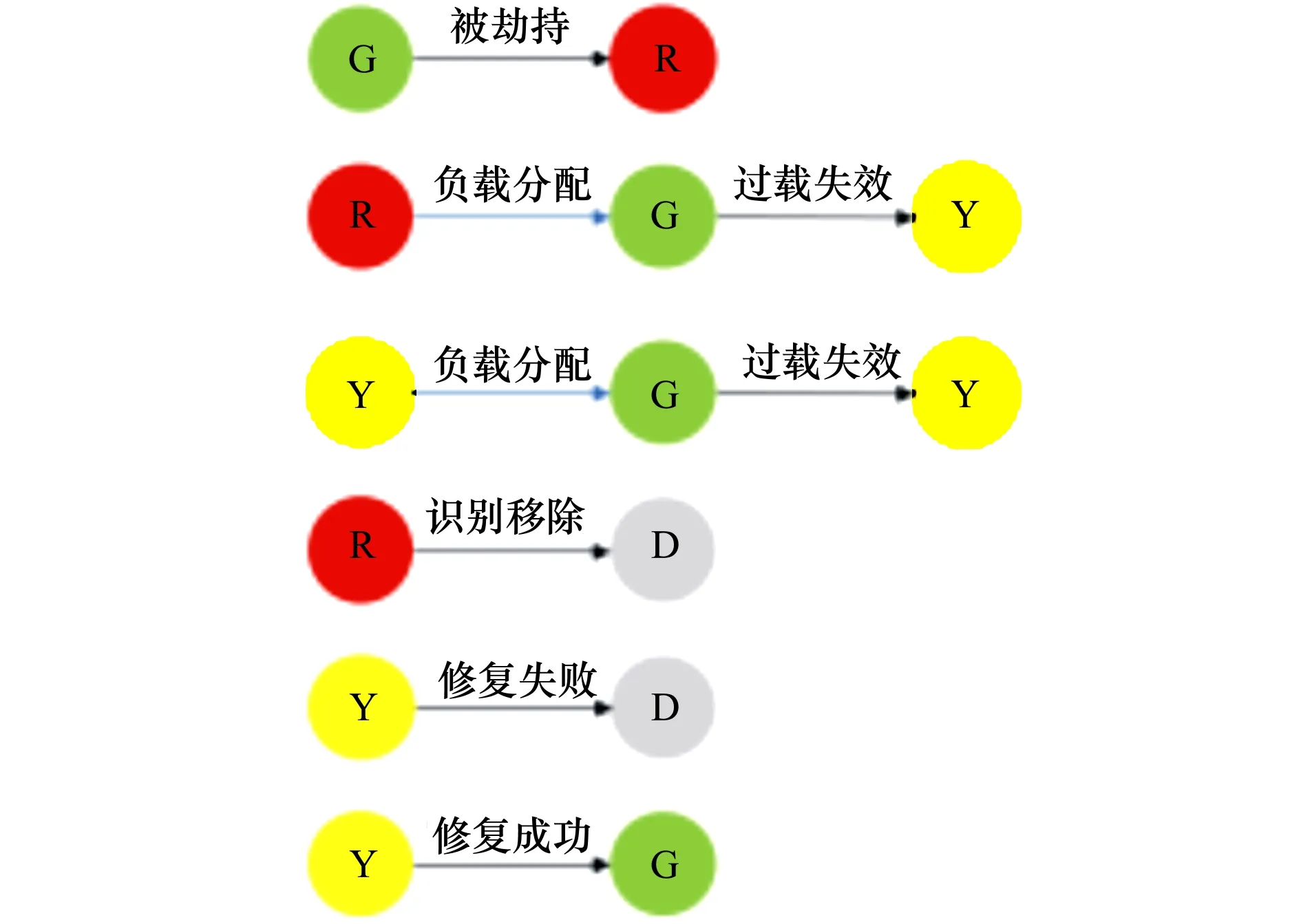
圖3 節(jié)點狀態(tài)變遷圖解
正常狀態(tài)節(jié)點G:可以相互通訊進(jìn)行信息交流以完成指定任務(wù),其負(fù)載小于過載極限。
被劫持狀態(tài)節(jié)點R:發(fā)送大量無用且優(yōu)先度較高的信息,導(dǎo)致相鄰節(jié)點過載失效,進(jìn)而造成級聯(lián)失效。
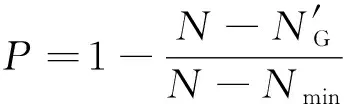
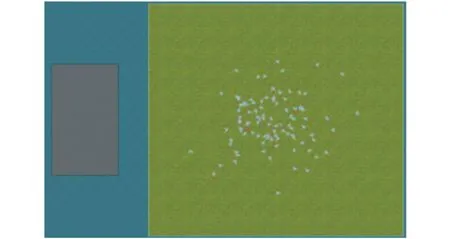
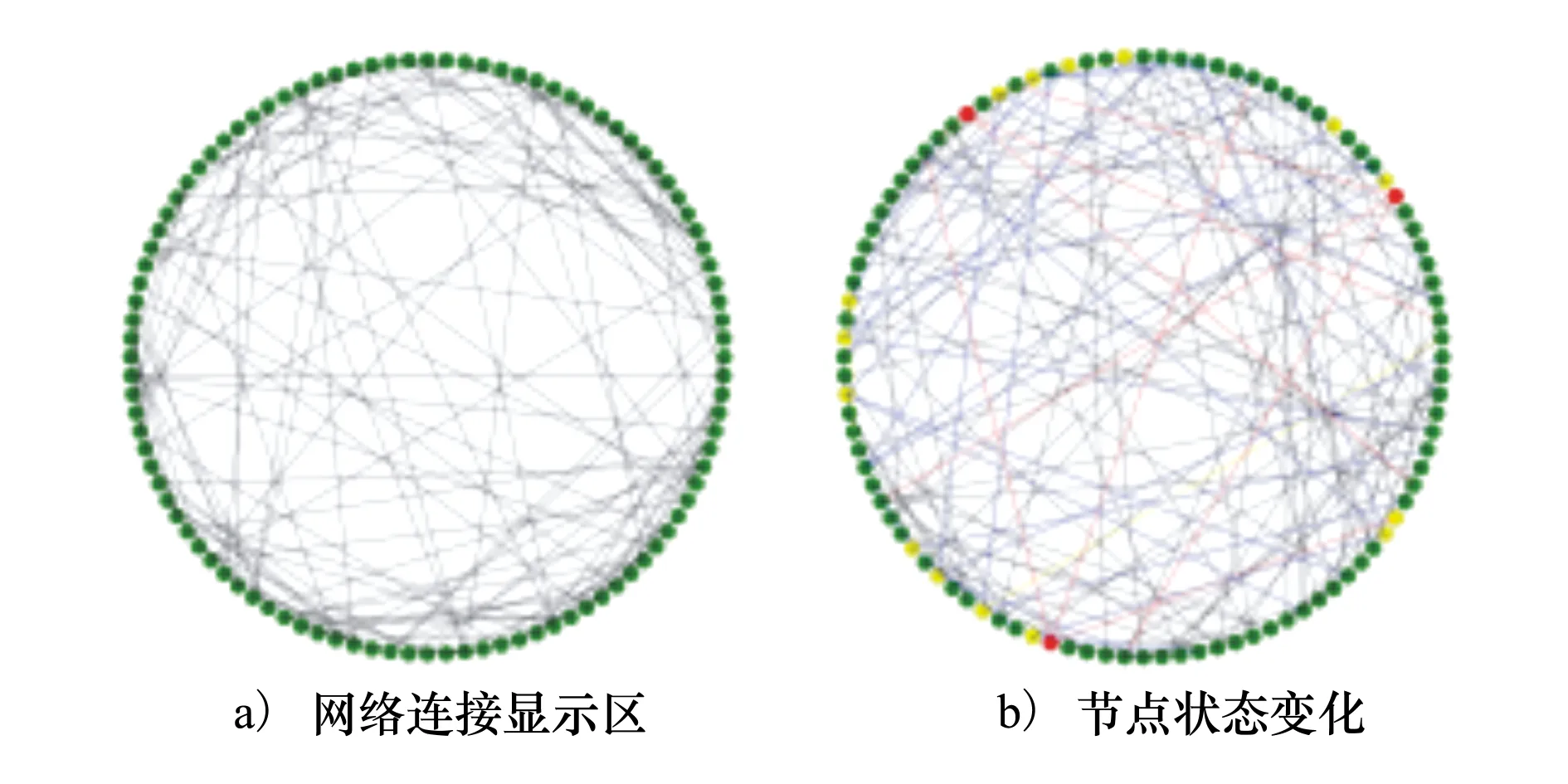
失效狀態(tài)節(jié)點Y:從G狀態(tài)節(jié)點轉(zhuǎn)變而來,轉(zhuǎn)變的條件為過載失效,即當(dāng)G的過載極限C與負(fù)載L有C 與R節(jié)點直接相連的節(jié)點在一次負(fù)載分配后獲得的載荷為 (8) 式中:RD為被劫持節(jié)點負(fù)載分配的調(diào)整因子;nR為與被劫持節(jié)點相連的節(jié)點數(shù);LR為被劫持節(jié)點在進(jìn)行負(fù)載分配瞬間的負(fù)載。 與Y節(jié)點直接相連的節(jié)點在其進(jìn)行負(fù)載分配后獲得的載荷為 (9) 式中:YD為通訊失效節(jié)點負(fù)載分配的調(diào)整因子;nY為與失效節(jié)點相連的節(jié)點的數(shù)目;LY為失效節(jié)點在過載瞬間的負(fù)載。圖4和圖5分別給出了被劫持無人機(jī)與過載失效無人機(jī)的負(fù)荷分配機(jī)制與狀態(tài)轉(zhuǎn)移路徑。 圖4 被劫持無人機(jī)負(fù)載分配機(jī)制與狀態(tài)轉(zhuǎn)移路徑 圖5 過載失效無人機(jī)負(fù)載分配機(jī)制及狀態(tài)轉(zhuǎn)移路徑 不難得出,失效無人機(jī)修復(fù)概率為 (10) 網(wǎng)絡(luò)抗毀性描述了網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)的可靠性,通常將網(wǎng)絡(luò)所能承受的最大節(jié)點或邊的移除比例稱為網(wǎng)絡(luò)的抗毀性[14]。但利用以往的網(wǎng)絡(luò)抗毀性的定義,很難對本文提出的基于動態(tài)距離快速變化的無人機(jī)集群網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)進(jìn)行評價。 Motter與Lai[5]提出基于最大連通片在級聯(lián)失效傳播后的變化來衡量級聯(lián)失效對于網(wǎng)絡(luò)造成的損傷,從而反映集群的抗毀性的優(yōu)劣程度 S=N′/N (11) 式中,N和N′分別代表級聯(lián)失效傳播前后網(wǎng)絡(luò)中的最大連通片存活節(jié)點數(shù)目。 本文的無人機(jī)集群網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)依賴于各無人機(jī)間的動態(tài)距離,最大連通片會實時變化;而一段時間內(nèi)的最大連通片存活節(jié)點數(shù)目的平均值指標(biāo)存在隱藏失效節(jié)點變化的風(fēng)險。因此基于網(wǎng)絡(luò)中正常狀態(tài)節(jié)點的個數(shù)來對網(wǎng)絡(luò)進(jìn)行評價顯然優(yōu)于基于最大連通片的節(jié)點數(shù)目。本文定義當(dāng)打擊事件發(fā)生時,集群能夠維持一定的性能同時從該次事件中恢復(fù)的能力,稱為該集群的抗毀性。集群的性能體現(xiàn)在正常存活節(jié)點的數(shù)量上,因此,本文采用相對規(guī)模這一指標(biāo)來對網(wǎng)絡(luò)抗毀性進(jìn)行評價。當(dāng)相對規(guī)模較大時,即存活節(jié)點數(shù)較多,集群抗毀性就較好;反之集群的抗毀性就相對較差。在本文改進(jìn)模型中,(11)式中的N和N′分別代表級聯(lián)失效傳播前后網(wǎng)絡(luò)中的處于正常狀態(tài)的節(jié)點數(shù)目。 利用AnyLogic多智能體仿真平臺進(jìn)行動態(tài)模型仿真。圖6截取了初始組網(wǎng)后的無人機(jī)集群實際狀態(tài);圖7a)表示圖6無人集群初始網(wǎng)絡(luò)的拓?fù)浣Y(jié)構(gòu);圖7b)表示無人機(jī)實際狀態(tài)變化在網(wǎng)絡(luò)節(jié)點上的對應(yīng)。 圖6 無人機(jī)集群運動狀態(tài) 圖7 集群狀態(tài)與網(wǎng)絡(luò)結(jié)構(gòu)對應(yīng)關(guān)系圖 4.2.1 級聯(lián)失效傳播規(guī)則 首先將被劫持無人機(jī)向周圍節(jié)點發(fā)送無用信息阻塞信道的負(fù)載分配方式稱為“一次分配”;失效節(jié)點進(jìn)行負(fù)載分配稱為“二次分配”。 將無人機(jī)現(xiàn)有的負(fù)載分為2個部分,分別是連接負(fù)載Ll與分配負(fù)載LD,其中連接負(fù)載Ll與其現(xiàn)有連接數(shù)即節(jié)點度值ki相關(guān);LD為正常無人機(jī)從被劫持無人機(jī)及失效無人機(jī)分配得到的負(fù)載。 無人機(jī)的過載極限受到每臺無人機(jī)的固有帶寬Lm影響,其與過載極限關(guān)系與(6)式類似 Ci=C=(1+μ)Lm,i=1,2,…N (12) 式中,μ為負(fù)載容差系數(shù)。其余參數(shù)設(shè)置見表2。 表2 級聯(lián)失效傳播影響實驗初始參數(shù) 4.2.2 級聯(lián)失效傳播影響分組實驗 第1組將負(fù)載容差系數(shù)μ作為變量,除與容差系數(shù)μ共同變動的過載極限C之外,其余參數(shù)均與表2相同。最后采集N′,基于(12)式進(jìn)行網(wǎng)絡(luò)遭受級聯(lián)失效打擊前后性能對比評價。 第2組將載荷傳播參數(shù)RD調(diào)整為1,即初始設(shè)置的50%,該組實驗提升了級聯(lián)失效在網(wǎng)絡(luò)中傳播的難度。 第3組實驗將被劫持無人機(jī)存活時長TR作為變量,其他參數(shù)均與表2相同。 第4組實驗將通訊距離rc作為變量,由于rc過小會影響初始網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)建立及集群在動態(tài)運動中的性能,讓無人機(jī)間連接難度更大;出現(xiàn)更多的孤立群體和孤立節(jié)點,此時進(jìn)行網(wǎng)絡(luò)的性能評價已經(jīng)失去了意義。所以設(shè)定其實驗范圍為100至400單位距離。 以上4組實驗均未考慮失效無人機(jī)的修復(fù)情況,再仿照第1組和第4組實驗,加入失效無人機(jī)的修復(fù)概率模型,進(jìn)行仿真數(shù)據(jù)的收集;基于第1組考慮修復(fù)的實驗設(shè)為第5組實驗;基于第4組考慮的修復(fù)實驗設(shè)為第6組實驗,其余參數(shù)均與之前參照的實驗參數(shù)相同。 4.2.3 級聯(lián)失效傳播影響實驗結(jié)果及分析 圖8a)至8f)為上述6組實驗結(jié)果折線圖,圖8a)在未考慮失效節(jié)點修復(fù)的情況下,展示級聯(lián)失效傳播前后網(wǎng)絡(luò)性能評價指標(biāo)相對規(guī)模S與負(fù)載容差系數(shù)μ之間的關(guān)系。在橫軸0~0.2的4組數(shù)據(jù)中,由于μ過小,S基本趨近于0,意味級聯(lián)失效在網(wǎng)絡(luò)中的接續(xù)傳播,導(dǎo)致了網(wǎng)絡(luò)中大多數(shù)節(jié)點的失效;而在二次分配臨界極限YD+Lm=4時,級聯(lián)失效的影響得到了極大的限制,相對規(guī)模大幅上升而后基本趨于穩(wěn)定。 圖8 6組實驗結(jié)果折線圖 圖8b)在未考慮失效節(jié)點修復(fù)的情況下在第1組實驗的基礎(chǔ)上,通過修改級聯(lián)失效傳播系數(shù)至之前的一半水平來提高級聯(lián)失效在集群網(wǎng)絡(luò)中傳播的難度。該實驗中有2個臨界極限,分別是μ=0.17時的二次分配極限(YD+Lm)和μ=0.33的一次分配極限(RD+Lm),可以看到相對規(guī)模S在這兩處突變,并在μ增大的過程中一直保持上升趨勢。 圖8c)是在未考慮失效節(jié)點修復(fù)的前提下,相對規(guī)模S與被劫持節(jié)點存活時長TR之間的關(guān)系;可以觀察到當(dāng)被劫持節(jié)點存活時長逐漸增大,相對規(guī)模相應(yīng)地減小。 圖8d)基于第1組實驗,將通訊距離rc作為與相對規(guī)模相關(guān)的變量,其中在rc=150時得到最小值;在此之后相對規(guī)模隨著通信距離限制的增加而增加。 圖8e)考慮了失效節(jié)點的修復(fù),由于失效節(jié)點修復(fù)的加入,在μ=0.33時S值較第1組實驗增加25%。 圖8f)與圖8e)類似,其對照組為圖8d);它表現(xiàn)了考慮修復(fù)之后相對規(guī)模S與通訊距離rc之間的關(guān)系,相對規(guī)模整體得到了提高。 4.2.4 集群規(guī)模對于級聯(lián)失效傳播影響 基于表2的參數(shù)設(shè)置,針對于集群規(guī)模與級聯(lián)失效傳播相關(guān)性設(shè)計實驗,觀察不同集群規(guī)模對相對規(guī)模的影響。 如圖9所示,當(dāng)集群規(guī)模在0~100內(nèi),集群規(guī)模的增大可以有效提升集群打擊前后的相對規(guī)模,在100處達(dá)到了峰值;而在100~200內(nèi),呈現(xiàn)先降后升的趨勢,在N=150左右,達(dá)到了最小值。當(dāng)集群規(guī)模較小時,集群遭受打擊后被移除的無人機(jī)數(shù)量較多。根據(jù)修復(fù)概率的設(shè)定此時集群的修復(fù)概率值較小,因此隨著多次打擊,集群修復(fù)能力不斷減弱,打擊后集群相對規(guī)模較小。當(dāng)集群規(guī)模較大時,集群整體冗余度高,遭受打擊后狀態(tài)正常的無人機(jī)數(shù)量較多,修復(fù)概率大,因而集群的修復(fù)能力較強。但是當(dāng)集群規(guī)模在100~200時打擊前后集群規(guī)模出現(xiàn)先降后增的趨勢。這是因為級聯(lián)失效在稠密的集群中連接傳播而造成更多的無人機(jī)失效。而這一影響在集群規(guī)模N=150時達(dá)到最高,而后隨著N的增加,級聯(lián)失效的影響逐漸被集群冗余性能抵消。也即,集群規(guī)模越大級聯(lián)失效對網(wǎng)絡(luò)性能的下降影響越大。但隨著時間增加,動態(tài)重連使得集群自身的修復(fù)能力逐漸增強,網(wǎng)絡(luò)性能逐漸恢復(fù)。 圖9 集群規(guī)模-相對規(guī)模關(guān)系 本文以無人機(jī)集群為研究背景,引入了集群節(jié)點最大連接數(shù)限制,構(gòu)建了基于概率的集群動態(tài)重連規(guī)則;以集群通訊網(wǎng)絡(luò)為研究對象,根據(jù)信道阻塞這一現(xiàn)象提出了基于二次載荷分配的級聯(lián)失效規(guī)則,并研究了考慮級聯(lián)失效與動態(tài)重連時集群的抗毀性變化趨勢。 通過仿真與數(shù)值實驗得出如下結(jié)論:①為提高集群抗毀性,應(yīng)根據(jù)具體任務(wù)優(yōu)化集群規(guī)模;②針對無人機(jī)集群通訊網(wǎng)絡(luò),應(yīng)盡量增加單臺無人機(jī)的固有通訊帶寬;③應(yīng)加快無人機(jī)集群中異常個體的識別和清除速度;④在成本允許的情況下,盡量增大通訊范圍。

2.4 動態(tài)網(wǎng)絡(luò)重構(gòu)
3 無人機(jī)集群抗毀性評價
4 實例仿真
4.1 實驗場景設(shè)置
4.2 級聯(lián)失效傳播場景下抗毀性評估實驗設(shè)計
5 結(jié) 論
猜你喜歡
作文·小學(xué)低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55