電動半掛汽車列車能量回收型緩速器匹配控制
2021-09-09 10:25:02聶孟穩(wěn)楊坤王杰馬超肖錦釗譚樹梁
河北科技大學(xué)學(xué)報 2021年4期
關(guān)鍵詞:控制策略
聶孟穩(wěn) 楊坤 王杰 馬超 肖錦釗 譚樹梁


摘 要:為解決緩速器安裝于半掛汽車列車傳動系統(tǒng)時存在“沖撞”嚴(yán)重的問題,提高緩速工況時制動能量的回收率,提出了一種安裝于半掛車前軸兩側(cè)輪轂內(nèi)的能量回收型緩速器方案。根據(jù)GB/T 32692-2016中對緩速制動性能的規(guī)定,對緩速器參數(shù)進(jìn)行了匹配,制定相應(yīng)的緩速器控制策略,根據(jù)控制策略中對電動半掛汽車列車質(zhì)量的需求,對質(zhì)量估計算法進(jìn)行研究,并基于粒子群算法對小制動強(qiáng)度時制動力矩分配進(jìn)行探討。通過Matlab/Simulink與TruckSim搭建了聯(lián)合仿真平臺,對質(zhì)量估計算法、電動半掛汽車列車經(jīng)濟(jì)性和制動安全性進(jìn)行仿真驗(yàn)證。仿真結(jié)果表明:質(zhì)量估計算法能夠準(zhǔn)確估計電動半掛汽車列車質(zhì)量;能量回收型緩速器能夠滿足電動半掛汽車列車緩速需求,提高制動能量回收率,且能夠有效解決電動半掛汽車列車緩速制動時的“沖撞”問題。相關(guān)研究能夠解決“沖撞”問題,提高制動安全性,為提高電動半掛汽車列車緩速制動時制動能量的回收率提供了新思路。
關(guān)鍵詞:車輛工程;電動半掛汽車列車;能量回收型緩速器;控制策略;質(zhì)量估計;粒子群算法
中圖分類號:U469.5?? 文獻(xiàn)標(biāo)識碼:A
doi:10.7535/hbkd.2021yx04003
收稿日期:2021-03-30;修回日期:2021-05-25;責(zé)任編輯:馮 民
基金項目:國家自然科學(xué)基金(51605265);山東省重點(diǎn)研發(fā)計劃項目(2018GGX105010)
第一作者簡介:聶孟穩(wěn)(1997—),男,山東菏澤人,碩士研究生,主要從事新能源汽車關(guān)鍵技術(shù)方面的研究。
通訊作者:楊 坤副教授。E-mail:yangkun_sdut@163.com
聶孟穩(wěn),楊坤,王杰,等.電動半掛汽車列車能量回收型緩速器匹配控制[J].河北科技大學(xué)學(xué)報,2021,42(4):334-344.NIE Mengwen, YANG Kun, WANG Jie, et al.Matching control of energy recovery retarder for electric semi-trailer train[J].Journal of Hebei University of Science and Technology,2021,42(4):334-344.
Matching control of energy recovery retarder for electric semi-trailer train
NIE Mengwen1,YANG Kun1,2,WANG Jie1,MA Chao1,XIAO Jinzhao1,TAN Shuliang3
(1.School of Transportation and Vehicle Engineering,Shandong University of Technology,Zibo,Shandong 255000,China;2.Electric Control Department of Shandong Yiwei Automobile Technology Company Limited,Zibo,Shandong 255130,China;3.Medium Heavy Vehicle Development Department 1,F(xiàn)AW Jiefang Automotive Company Limited Commercial Vehicle Development Institute,Changchun,Jilin 130011,China)
Abstract:In order to improve the serious problem of "collision" when the retarder is installed in the transmission system of a semi-trailer vehicle,and to improve the braking energy recovery rate during retarding conditions,a scheme of energy recovery type retarder installed in the hub on both sides of the front axle of semi-trailer was proposed.According to the regulation of retarder braking performance in GB/T 32692-2016,the retarder parameters were matched,and the corresponding retarder control strategy was proposed.According to the quality requirements of the electric semitrailer train in the control strategy,the quality estimation algorithm was studied,and based on the particle swarm algorithm,the braking torque distribution at low braking intensity was studied.A joint simulation platform was built through Matlab/Simulink and TruckSim to simulate and verify the quality estimation algorithm,the economy of electric semitrailer trains and braking safety.The simulation results show that the quality estimation algorithm can accurately estimate the quality of electric semitrailer trains; the energy recovery retarder can meet the retardation requirements of electric semi-trailer vehicles,improve the braking energy recovery rate,and can effectively improve the "collision" problem of the electric semi-trailer train during slow braking.Related research provides new ideas for improving the braking energy recovery rate of electric semi-trailer vehicles during slow braking,and can improve the "collision" problem and improve braking safety.
Keywords:
vehicle engineering;electric semi-trailer train;energy recovery retarder;control strategy;quality estimation;particle swarm optimization
半掛汽車列車能夠有效提高物流效率[1]。隨著物流行業(yè)的快速發(fā)展,半掛汽車列車的數(shù)量不斷增多,年行駛里程增加[2],提高其整車經(jīng)濟(jì)性,能夠有效減少社會能源的消耗[3]。此外,半掛汽車列車制動安全性也應(yīng)受到高度重視,2014—2016年,中國67.4%的重大交通事故與重型商用車有關(guān),其中大部分和制動器的制動效能有關(guān)[4]。根據(jù)GB 7258-2017規(guī)定,總質(zhì)量大于或等于12 000 kg的貨車,必須裝備緩速器或其他輔助制動裝置[5],緩速器能夠避免重載車輛長時間使用行車制動器時發(fā)生制動效能衰退的問題,提高制動安全性[1]。
傳統(tǒng)緩速器主要有液力緩速器、電渦流緩速器、自勵式緩速器和永磁緩速器等[6],工作時其將動能轉(zhuǎn)化為熱能,造成了制動能量的損失。對緩速制動時能量進(jìn)行回收利用,能夠降低車輛能耗,提高整車經(jīng)濟(jì)性[7]。為對緩速制動時的能量進(jìn)行回收,楊志遠(yuǎn)[8]提出了一種將電磁離合式發(fā)電機(jī)與電渦流緩速器并聯(lián)安裝在變速器輸出軸處的能量回收式電渦流緩速器方案,在緩速制動時將制動能量轉(zhuǎn)化為電能儲存在儲能系統(tǒng),滿足電渦流緩速器與車用電器的用電需求;針對燃油商用車,周泉[9]設(shè)計了一種由電渦流制動單元、再生制動單元和冷卻單元等組成的能量回收式緩速裝置,利用再生制動單元產(chǎn)生電能,滿足電渦流制動單元用電需求,并為車載電器提供電能;GUO等[10]針對燃油商用車,基于電渦流緩速器原理和單相磁阻電機(jī)原理,設(shè)計了一種安裝于變速器輸出軸的電磁液冷能量回收式緩速器,將緩速制動時的部分能量轉(zhuǎn)化為電能,滿足電渦流緩速機(jī)構(gòu)的用電需求。綜上所述,燃油商用車電能儲能系統(tǒng)容量較小,無法儲存大量能量,相關(guān)研究主要基于電渦流緩速器原理對車輛進(jìn)行緩速制動,并基于發(fā)電機(jī)原理對部分緩速制動能量進(jìn)行回收,產(chǎn)生電能,滿足電渦流緩速機(jī)構(gòu)的用電需求;同時,相關(guān)研究中,能量回收式緩速器安裝于傳動系統(tǒng),但對于半掛汽車列車,緩速器安裝于牽引車傳動系統(tǒng)時,會存在“沖撞”等嚴(yán)重問題。
電動半掛汽車列車電能儲能系統(tǒng)容量大,能夠儲存更多制動回收的能量。本文針對電動半掛汽車列車,為解決“沖撞”嚴(yán)重問題,提高緩速制動時的能量回收率,基于發(fā)電機(jī)原理,考慮儲能系統(tǒng)SOC的限制,提出一種能量回收型緩速器方案,并根據(jù)GB/T 32692-2016中對緩速制動性能的規(guī)定[11],對緩速器參數(shù)進(jìn)行匹配,使其滿足電動半掛汽車列車的緩速需求。同時提出相應(yīng)的能量回收型緩速器控制策略,根據(jù)控制策略中對半掛汽車列車的質(zhì)量需求,對整車質(zhì)量估計算法進(jìn)行研究,基于粒子群算法對小制動強(qiáng)度時制動力矩分配進(jìn)行探討。通過Matlab/Simulink與TruckSim搭建聯(lián)合仿真平臺,對質(zhì)量估計算法、電動半掛汽車列車的經(jīng)濟(jì)性與制動安全性進(jìn)行仿真驗(yàn)證。
1 能量回收型緩速器方案設(shè)計
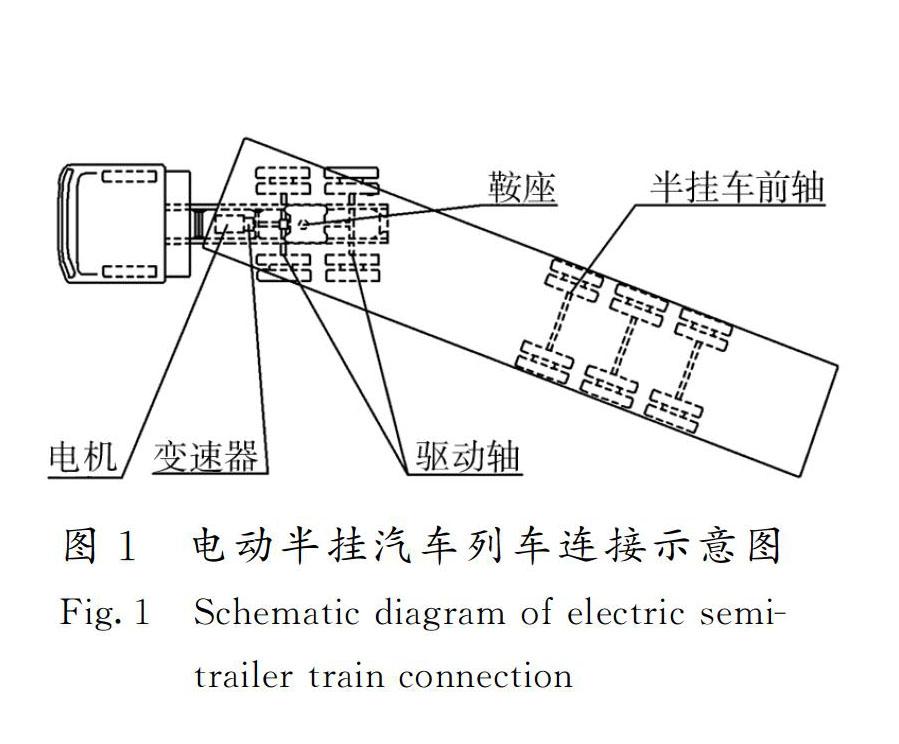
如圖1所示,電動半掛汽車列車工作時牽引車通過鞍座與半掛車相連,緩速器安裝于牽引車傳動系統(tǒng)時,緩速器制動力矩通過傳動系統(tǒng)作用于牽引車驅(qū)動軸,對牽引車制動。質(zhì)量較大的半掛車無制動力,巨大的慣性使半掛車通過鞍座對牽引車產(chǎn)生“沖撞”,該沖撞力無法保證完全作用于半掛汽車列車的縱向平面內(nèi)[1],沖撞力過大時將導(dǎo)致半掛汽車列車發(fā)生折疊,存在制動安全性問題。針對該問題,本文設(shè)計一種安裝于半掛車前軸兩側(cè)輪轂內(nèi)的能量回收型緩速器,在緩速制動時對半掛車制動,與半掛車相比,牽引車慣性較小,此時牽引車和半掛車之間相互作用力較小,能夠提高緩速制動時的安全性。同時,能量回收型緩速器能夠在緩速制動時將動能轉(zhuǎn)化為電能進(jìn)行回收,提高電動半掛汽車列車的經(jīng)濟(jì)性,當(dāng)儲能系統(tǒng)SOC不滿足回收條件時,能夠?qū)⒅苿幽芰哭D(zhuǎn)化為熱能,保證緩速效果。
能量回收型緩速器原理如圖2所示,由行星減速機(jī)構(gòu)、鼓式制動機(jī)構(gòu)、耗能盤和發(fā)電機(jī)構(gòu)等組成。行星減速機(jī)構(gòu)由行星架、行星齒輪、太陽輪和齒圈等組成,齒圈位于緩速器殼體上;鼓式制動機(jī)構(gòu)由直線電機(jī)、制動蹄和電機(jī)底座等組成,電機(jī)底座與車軸固定連接;耗能盤與車軸固定連接;發(fā)電機(jī)構(gòu)利用永磁發(fā)電機(jī)原理,由定子、轉(zhuǎn)子和轉(zhuǎn)子支撐架等組成,定子固定于殼體上,轉(zhuǎn)子內(nèi)嵌有永磁體,并安裝于轉(zhuǎn)子支撐架上,轉(zhuǎn)子支撐架截面呈“工”字形,兩側(cè)空間安裝其他機(jī)構(gòu),其中,行星減速機(jī)構(gòu)的太陽輪與轉(zhuǎn)子支撐架固定連接。
緩速制動時,定子繞組閉合,車輪帶動行星架轉(zhuǎn)動,并通過行星減速機(jī)構(gòu)帶動轉(zhuǎn)子支撐架轉(zhuǎn)動,固定于轉(zhuǎn)子支撐架上的轉(zhuǎn)子產(chǎn)生旋轉(zhuǎn)磁場,定子繞組切割磁力線,將動能轉(zhuǎn)化為電能,同時產(chǎn)生阻礙轉(zhuǎn)子轉(zhuǎn)動的阻力矩,通過行星減速機(jī)構(gòu)傳遞至車輪,使車速降低,當(dāng)儲能系統(tǒng)SOC不滿足回收條件時,耗能盤將無法回收的電能轉(zhuǎn)化為熱能;機(jī)械制動時,直線電機(jī)推動制動蹄與轉(zhuǎn)子支撐架內(nèi)側(cè)制動鼓貼合,產(chǎn)生制動力矩,并通過行星減速機(jī)構(gòu)傳遞至車輪,降低車速。
2 能量回收型緩速器參數(shù)匹配
本文以某6×4電動牽引車與半掛車組合而成的電動半掛汽車列車為目標(biāo)車型對能量回收型緩速器參數(shù)進(jìn)行參數(shù)匹配,目標(biāo)車型整車參數(shù)和動力總成參數(shù)如表1所示。
基于緩速器制動性能試驗(yàn)規(guī)定[11],緩速器發(fā)電機(jī)構(gòu)功率、最大制動力矩和基速應(yīng)滿足式(1)。
Pa≥Mg4 000ηp,
Tbmax≥1.27Mg-CDAu2tr42.3ipηp,
n≥30uti3.6πr,(1)
式中:Pa為緩速器發(fā)電機(jī)構(gòu)功率;M為半掛汽車列車總質(zhì)量;ηp為行星減速機(jī)構(gòu)機(jī)械效率;Tbmax為緩速器發(fā)電機(jī)構(gòu)最大制動力矩;CD為空氣阻力系數(shù);A為迎風(fēng)面積;ut為緩速器制動性能試驗(yàn)中的規(guī)定車速;r為車輪滾動半徑;ip為行星減速機(jī)構(gòu)傳動比,基于機(jī)械手冊對行星減速機(jī)構(gòu)公稱傳動比的規(guī)定[12],ip=6.3;n為緩速器發(fā)電機(jī)構(gòu)基速。
基于式(1),并參考發(fā)電機(jī)技術(shù)條件的相關(guān)規(guī)定[13],確定緩速器發(fā)電機(jī)構(gòu)參數(shù)如表2所示。
3 能量回收型緩速器控制研究
電動半掛汽車列車下長坡時,需要長時間對車輛進(jìn)行制動,保持車速穩(wěn)定,能量回收型緩速器不僅能夠控制車速保持穩(wěn)定,而且當(dāng)電動半掛汽車列車進(jìn)行制動、電機(jī)制動力矩?zé)o法滿足制動需求時,能量回收型緩速器能提供制動力矩,并對制動動能進(jìn)行回收,提高制動能量回收率和整車經(jīng)濟(jì)性。
3.1 能量回收型緩速器控制流程研究
能量回收型緩速器控制流程如圖3所示,由于電動半掛汽車列車工作時載貨量不同,質(zhì)量變化較大,為對制動力矩進(jìn)行精確控制,需要對半掛汽車列車質(zhì)量進(jìn)行估計。當(dāng)緩速器開關(guān)開啟時,判斷制動踏板是否被踩下,當(dāng)制動踏板壓力>0時,對制動強(qiáng)度zdem進(jìn)行計算。當(dāng)zdem>0.6時屬于緊急制動,應(yīng)采用機(jī)械制動以提高制動安全性;另外,當(dāng)u≤10 km/h時,由于此時制動能量回收效率過低,因此采用機(jī)械制動。當(dāng)zdem≤0.6,u>10 km/h時,利用緩速器、電機(jī)和機(jī)械制動系統(tǒng)聯(lián)合制動,并對制動能量進(jìn)行回收,基于GB 12676-2014中對各軸制動力矩分配的規(guī)定[14],根據(jù)zdem是否大于0.15,將聯(lián)合制動分為小強(qiáng)度制動和中強(qiáng)度制動;當(dāng)制動踏板壓力=0時,利用緩速器維持車輛保持勻速。圖3中,zdem為需求制動強(qiáng)度;u為行駛車速;SOC為儲能系統(tǒng)荷電狀態(tài)。
3.2 半掛汽車列車質(zhì)量估計研究
以半掛汽車列車質(zhì)量作為未知參數(shù),對模型中未知參數(shù)進(jìn)行辨識的方法主要有遞推最小二乘法、概率密度逼近參數(shù)估計法等,其中,遞推最小二乘法具有原理簡單、收斂速度快的優(yōu)點(diǎn)[15]。本文基于電動半掛汽車列車縱向動力學(xué)模型,采用遞推最小二乘法對電動半掛汽車列車質(zhì)量進(jìn)行估計。
電動半掛汽車列車縱向動力學(xué)模型如式(2)所示。
sTtigi0ηtr+1-sTbr-CDAu221.15=Mactgfcosα+Mactgsinα+δMactdudt,(2)
式中:s為行駛狀態(tài),s=1代表驅(qū)動狀態(tài),s=0代表制動狀態(tài);Tt為電機(jī)驅(qū)動轉(zhuǎn)矩;ig為變速器傳動比;i0為主減速器傳動比;ηt為傳動系統(tǒng)機(jī)械效率;Tb為制動力矩;Mact為電動半掛汽車列車質(zhì)量;f為滾動阻力系數(shù);α為道路坡度角;δ為電動半掛汽車列車旋轉(zhuǎn)質(zhì)量換算系數(shù);其他符號同上。
由式(2)可知,道路坡度與電動半掛汽車列車質(zhì)量之間存在參數(shù)耦合,為對半掛汽車列車質(zhì)量進(jìn)行估計,需要對兩者進(jìn)行解耦。將式(2)整理為式(3)可知,通過利用微電子機(jī)械系統(tǒng)加速度傳感器采集縱向加速度axsen[16],并求得垂向加速度az的方式,可實(shí)現(xiàn)兩參數(shù)解耦。
sTtigi0ηtr+1-sTbr-CDAu221.15=Mactgsinα+dudt-dudt+gfcosα+δdudt=Mactaxsen+azf+δ-1dudt,
(3)
式中:axsen=gsinα+dudt;az=gcosα。
基于遞推最小二乘法原理和式(3),令So和Sc如式(4)所示。
So=sTtigi0ηtr+1-sTbr-CDAu221.15,
Sc=azf+ax+δ-1dudt,
So=[s0],
Sc=[sc],(4)
式中:So為實(shí)際系統(tǒng)輸出矩陣;Sc為觀測矩陣;其他符號同上。
每更新一次觀測數(shù)據(jù),電動半掛汽車列車質(zhì)量估計模型根據(jù)實(shí)際系統(tǒng)輸出量與觀測數(shù)據(jù)計算得到的輸出量之間的偏差,對質(zhì)量估計值不斷修正,從而改善估計精度,獲得較好的估計值。基于對道路坡度和半掛汽車列車質(zhì)量的解耦,電動半掛汽車列車質(zhì)量估計模型如式5所示。
M^actk=[m^actk],
M^actk=M^actk-1+Gk[Sok-SckM^actk-1],
Gk=Pk-1SckTλ+SckPk-1SckT,
Pk=[I-GkSck]Pk-1λ,(5)
式中:m^actk為半掛汽車列車估計質(zhì)量;M^act(k)為質(zhì)量估計矩陣;G(k)為系統(tǒng)增益矩陣;P(k)為系統(tǒng)協(xié)方差矩陣;k為迭代次數(shù),k=1,2,…;I為單位矩陣;SymbollA@為遺忘因子,SymbollA@=0.95,其他符號同上。
3.3 勻速行駛與小強(qiáng)度制動控制研究
根據(jù)GB 12676-2014規(guī)定,當(dāng)zdem>0.15,2軸以上車輛制動時,至少1根前軸利用附著系數(shù)大于至少1根后軸利用附著系數(shù)[14],此時,電動半掛汽車列車各軸制動力矩按理想制動力分配曲線進(jìn)行分配,可回收的制動能量最多[17],由再生制動力矩優(yōu)先提供各軸需求制動力矩時,可提高制動能量回收率;而當(dāng)zdem≤0.15時,法規(guī)對電動半掛汽車列車軸間制動力矩分配沒有限制,同時,根據(jù)中國各級公路最大縱坡的規(guī)定[18],電動半掛汽車列車行駛道路坡度不大于7%,即下坡時制動強(qiáng)度不大于0.07,為提高制動能量回收率,并保證制動安全性,本文對勻速行駛控制策略和小強(qiáng)度制動控制策略進(jìn)行研究。
3.3.1 勻速行駛控制策略
勻速行駛控制策略流程如圖4所示,根據(jù)緩速制動性能試驗(yàn)工況[11],將目標(biāo)車速定為30 km/h,當(dāng)u>30 km/h時,通過聯(lián)合制動將車速降低至30 km/h,并利用加速度傳感器采集axzen信號,計算出垂向加速度az和需求制動力矩Tdem,對需求制動力矩進(jìn)行分配。當(dāng)SOC<90%時,回收產(chǎn)生的電能,對儲能系統(tǒng)充電,否則,利用耗能盤將電能轉(zhuǎn)化為熱能,保證緩速效果。圖4中:Tdem為電動半掛汽車列車需求制動力矩;Tbr為緩速器制動力矩,其他符號同上。
3.3.2 小強(qiáng)度制動控制策略
小強(qiáng)度制動控制策略如圖5所示,根據(jù)質(zhì)量估計結(jié)果和需求制動強(qiáng)度對需求制動力矩進(jìn)行計算,并基于粒子群優(yōu)化算法和離線優(yōu)化結(jié)果對制動力矩進(jìn)行分配,當(dāng)SOC<90%時,回收產(chǎn)生的電能,對儲能系統(tǒng)充電,否則,利用耗能盤將電能轉(zhuǎn)化為熱能。
粒子群優(yōu)化算法以再生制動功率最大為優(yōu)化目標(biāo),以Fhsc為約束,對緩速器制動力矩、電機(jī)制動力矩和機(jī)械制動力矩進(jìn)行分配。其中,F(xiàn)hsc=min[Fhsr,F(xiàn)hsm],F(xiàn)hsr為緩速器優(yōu)先提供制動力矩時牽引車與半掛車之間的沖撞力,F(xiàn)hsm為電機(jī)優(yōu)先提供制動力矩時的沖撞力,沖撞力計算如式(6)所示。
Fhs=mtms+mtFfs+Tbsr-msms+mtFft+Tbtr,(6)
式中:mt為牽引車質(zhì)量;ms為半掛車質(zhì)量;Ffs為半掛車滾動阻力;Tbs為半掛車制動力矩;Fft為牽引車滾動阻力;Tbt為牽引車制動力矩;其他符號同上。
首先,對粒子群進(jìn)行初始化,如圖6所示,根據(jù)車速u計算緩速器和電機(jī)轉(zhuǎn)速nr和nm,得到該轉(zhuǎn)速下緩速器和電機(jī)可提供的最大制動力矩Tbrmax和Tbmmax;設(shè)置粒子群迭代次數(shù)和規(guī)模,并對粒子速度v和位置k1,k2進(jìn)行初始化,其中,k1和k2分別為緩速器和電機(jī)制動力矩系數(shù),k1,k2∈[0,1]。
根據(jù)式(7)計算w粒子的適應(yīng)度Pwbr,即再生制動功率,Pwbr計算流程如圖7所示。當(dāng)Pwbr大于最大允許充電功率Pcmax或沖撞力Fhs大于Fhsc時,令Pwbr=0;當(dāng)粒子數(shù)目達(dá)到規(guī)模W時,初始化完成。
Pbr=Tbruipηr1 800.18r+Tbmuigi0ηm3 600.35r,(7)
式中:Tm為電機(jī)制動力矩;其他符號同上。
粒子群初始化后,對粒子群進(jìn)行迭代更新,如圖8所示。基于初始粒子群,尋找個體最優(yōu)Pibr與全局最優(yōu)Pgbr,即各粒子最大制動功率與粒子群全局最大制動功率,并更新各粒子速度和位置,更新規(guī)則如式(8)所示。同時,計算適應(yīng)度Pwbr,并對Pibr與Pgbr進(jìn)行更新,當(dāng)粒子群迭代次數(shù)達(dá)到M,完成迭代,輸出全局最優(yōu)Pgbr及對應(yīng)的緩速器和電機(jī)制動力矩Tbr和Tbm。
vw(m+1)=cvw(m)+c1r1[pw(m)-xw(m)]+c2r2[pg,w(m)-xw(m)],xw(m+1)=xw(m)+vw(m+1),w=1,2,…,W,m=0,1,…M。(8)
式中:c為權(quán)重因子;c1為個體學(xué)習(xí)因子;c2為全局學(xué)習(xí)因子;xw為粒子位置,xw=[k1w,k2w];r1,r2為隨機(jī)數(shù),r1,r2∈[0,1];Pw為粒子個體最優(yōu)位置;Pg,w為全局最優(yōu)位置;vw為粒子速度。
滿載工況下,u=50 km/h,Tdem=15 000 N·m時,全局最優(yōu)Pgbr迭代曲線如圖9所示,在迭代14次后,Pgbr達(dá)到最優(yōu)值。基于粒子群優(yōu)化算法,令迭代次數(shù)為50,對不同負(fù)載、不同車速下制動力矩分配進(jìn)行離線優(yōu)化,并基于優(yōu)化結(jié)果,對制動力矩進(jìn)行分配,其中,滿載工況下,u=50 km/h時,制動力矩分配如圖10所示,當(dāng)緩速器和電機(jī)再生制動力矩滿足需求制動力矩時,再生制動功率Pgbr整體呈線性增長。由此可知,粒子群優(yōu)化算法可用于制動力矩分配。
4 電動半掛汽車列車仿真驗(yàn)證
通過對能量回收型緩速器的匹配與控制研究,基于表1參數(shù),利用Matlab/Simulink與TruckSim搭建聯(lián)合仿真平臺,對質(zhì)量估計算法、電動半掛汽車列車經(jīng)濟(jì)性和制動安全性進(jìn)行仿真驗(yàn)證。聯(lián)合仿真平臺原理如圖11所示,在Simulink中搭建電機(jī)模塊、能量回收型緩速器模塊、機(jī)械制動模塊和質(zhì)量估計模塊等,通過TruckSim的輸入端口和輸出端口實(shí)現(xiàn)聯(lián)合仿真平臺信號傳遞。
4.1 質(zhì)量估計算法驗(yàn)證
基于緩速器制動性能試驗(yàn)工況[11],對質(zhì)量估計算法的準(zhǔn)確性進(jìn)行驗(yàn)證,結(jié)果如表3和圖12所示。在空載和滿載時,質(zhì)量估計算法誤差分別為0.129%和0.151%,誤差較小,即質(zhì)量估計算法能夠準(zhǔn)確估計電動半掛汽車列車質(zhì)量。
4.2 經(jīng)濟(jì)性驗(yàn)證
基于緩速制動性能試驗(yàn)工況[11]與中國重型商用車瞬態(tài)循環(huán)工況[19](China-world transient vehicle cycle,C-WTVC)對電動半掛汽車列車經(jīng)濟(jì)性進(jìn)行驗(yàn)證,并在C-WTVC工況中,對有無安裝能量回收型緩速器的電動半掛汽車列車的經(jīng)濟(jì)性進(jìn)行仿真對比分析,其中,電動半掛汽車列車儲能系統(tǒng)能量為290.61 kW·h,初始SOC為80%。
如圖13所示,緩速制動性能試驗(yàn)工況[11]下,電動半掛牽引車在坡度為7%的道路上,行駛6 km,SOC增加4.27%,即回收能量12.41 kW·h。
基于GB/T 27840-2011規(guī)定[19],C-WTVC工況下,半掛汽車列車100 km消耗能量如表4所示。當(dāng)半掛汽車列車載荷較大時,能量回收型緩速器能夠有效提高電動半掛汽車列車制動能量回收率,考慮到半掛汽車列車通常載荷較大[1],以滿載工況為例,車速曲線、SOC變化曲線和機(jī)械制動力矩如圖14所示。由圖14可知,實(shí)際車速能夠精確跟蹤目標(biāo)速度,說明控制策略能夠滿足駕駛員需求。在高速制動時,無能量回收型緩速器時,再生制動力矩?zé)o法滿足制動需求,需要機(jī)械制動力矩提供需求制動力矩,造成部分制動能量未能回收;有能量回收型緩速器時,再生制動力矩滿足制動需求,不需要提供機(jī)械制動力矩,增加了制動能量回收率。電動半掛汽車列車作為商用車,年行駛里程約為105 600 km[2],滿載工況下,安裝能量回收型緩速器的電動半掛汽車列車每年能夠節(jié)省能量1 024.32 kW·h。
4.3 制動安全性驗(yàn)證
緩速器經(jīng)常在下長坡時工作,由于中國長坡路況常伴隨彎道[20],基于緩速器制動性能試驗(yàn)規(guī)定,建立了緩速器制動安全性測試工況:在TruckSim中建立坡度為7%、路面附著系數(shù)為0.85、橫向位置與縱向位置如圖15所示的坡道,初始車速和目標(biāo)車速為30 km/h。僅采用緩速器進(jìn)行制動,車速變化如圖16所示,實(shí)際車速在30 km/h左右,緩速器能夠滿足緩速制動需求。
沖撞力絕對值越大,“沖撞”越嚴(yán)重。如圖17 a)所示,空載時,緩速器安裝于牽引車與半掛車,“沖撞”程度相似;如圖17 b)和圖17 c)所示,半載和滿載時,緩速器安裝于半掛車,沖撞力絕對值分別降低69.7%和88.2%。因此,緩速器安裝于半掛車能夠有效降低負(fù)載時牽引車與半掛車之間的“沖撞”,提高制動安全性。
5 結(jié) 語
緩速器安裝于半掛汽車列車傳動系統(tǒng)時存在“沖撞”嚴(yán)重的問題,為提高緩速制動的安全性及緩速制動時的能量回收率,本文對能量回收型緩速器進(jìn)行了研究。
1)考慮儲能單元SOC的限制,提出了一種安裝于半掛車前軸兩側(cè)輪轂內(nèi)的能量回收型緩速器方案,根據(jù)GB/T 32692-2016中對緩速制動性能的規(guī)定,對緩速器參數(shù)進(jìn)行了匹配,提出了相應(yīng)的緩速器控制策略,根據(jù)控制策略中對電動半掛汽車列車質(zhì)量的需求,對質(zhì)量估計算法進(jìn)行了研究,并基于粒子群算法對小制動強(qiáng)度時制動力矩分配進(jìn)行了研究。
2)基于Matlab/Simulink與TruckSim搭建了聯(lián)合仿真平臺,對質(zhì)量估計算法、電動半掛汽車列車的經(jīng)濟(jì)性和制動安全性進(jìn)行了仿真驗(yàn)證。仿真結(jié)果表明:質(zhì)量估計算法能夠準(zhǔn)確估計電動半掛汽車列車質(zhì)量;能量回收型緩速器能夠滿足緩速需求,在緩速性能測試工況中回收能量12.41 kW·h,且能夠提高C-WTVC工況下電動半掛汽車列車的制動能量回收率,從而提高了整車經(jīng)濟(jì)性;同時,與安裝于牽引車的情況相比,緩速器安裝于半掛車時,可有效降低負(fù)載時牽引車與半掛車之間的“沖撞”。能量回收型緩速器能夠提高電動半掛汽車列車制動能量回收率,降低制動時“沖撞”,提高制動安全性。
車速信號波動較大時會影響質(zhì)量估計算法的結(jié)果。本文未對車速信號進(jìn)行處理,在未來研究中應(yīng)針對問題特性設(shè)計濾波算法,消除車速信號的劇烈波動,減小車速信號波動的影響。此外,還需進(jìn)一步對緩速器的結(jié)構(gòu)和尺寸參數(shù)進(jìn)行設(shè)計,為能量回收型緩速器得到更廣泛應(yīng)用提供參考。
參考文獻(xiàn)/References:
[1] 何仁,申小敏.半掛汽車列車聯(lián)合制動系統(tǒng)性能仿真分析[J].重慶交通大學(xué)學(xué)報(自然科學(xué)版),2016,35(5):165-173.
HE Ren,SHEN Xiaomin.Performance simulation and analysis of the united braking system of tractor semi-trailer[J].Journal of Chongqing Jiaotong University(Natural Sciences),2016,35(5):165-173.
[2] 李珂,王燕軍,王濤,等.烏魯木齊市機(jī)動車排放清單研究[J].環(huán)境科學(xué)研究,2010,23(4):407-412.
LI Ke,WANG Yanjun,WANG Tao,et al.Vehicle pollution emission inventory research in Urumqi city[J].Research of Environmental Sciences,2010,23(4):407-412.
[3] BARAL N R,ASHER Z,TRINKO D,et al.Biomass feedstock transport using fuel cell and battery electric trucks improves lifecycle metrics of biofuel sustainability and economy[J].Journal of Cleaner Production,2021,279:123593.
[4] 谷亞蒙.半掛汽車列車折疊失穩(wěn)狀態(tài)仿真系統(tǒng)開發(fā)研究[D].西安:長安大學(xué),2019.
GU Yameng.Development Study on Jackknifing Simulation System of Tractor-semitrailer[D].Xi′an:Chang′an University,2019.
[5] GB 7258—2017,機(jī)動車運(yùn)行安全技術(shù)條件[S].
[6] 葉樂志.汽車永磁緩速器設(shè)計理論與試驗(yàn)研究[D].北京:北京工業(yè)大學(xué),2012.
YE Lezhi.Design Theoreticaland Experimental Study on Permanent Magnet Retarder for Vehicle[D].Beijing:Beijing University of Technology,2012.
[7] SICILIA M,SIMONE M C.Development of an energy recovery device based on the dynamics of a semi-trailer[C]//Advances in Design,Simulation and Manufacturing III.DSMIE 2020.Lecture Notes in Mechanical Engineering.Cham:Springer,2020:74-84.
[8] 楊志遠(yuǎn).能量回收式電渦流緩速器設(shè)計研究[D].南京:南京理工大學(xué),2006.
YANG Zhiyuan.Design and Research of Energy Recovery Eddy Current Retarder[D].Nanjing:Nanjing University of Science and Technology,2006.
[9] 周泉.汽車制動能量回收式緩速裝置研究[D].武漢:武漢理工大學(xué),2015.
ZHOU Quan.Research on Energy Recuperative Eddy Current Retarderfor Automobiles[D].Wuhan:Wuhan University of Technology,2015.
[10]GUO W G,LI D S,YE L Z.Performance analysis of an electromagnetic liquid-cooled energy recovery retarder for heavy vehicles[C]//2019 IEEE Vehicle Power and Propulsion Conference (VPPC).Hanoi:[s.n.],2019:1-4.
[11]GB/T 32692—2016,商用車輛緩速制動系統(tǒng)性能試驗(yàn)方法[S].
[12]聞邦椿.機(jī)械設(shè)計手冊-第2卷-機(jī)械零部件設(shè)計(連接、緊固與傳動)[M].北京:機(jī)械工業(yè)出版社,2018.
[13]黃國治.中小旋轉(zhuǎn)電機(jī)設(shè)計手冊[M].北京:中國電力出版社,2014.
[14]GB 12676—2014,商用車輛和掛車制動系統(tǒng)技術(shù)要求及試驗(yàn)方法[S].
[15]LIN N,ZONG C F,SHI S M.The method of mass estimation considering system error in vehicle longitudinal dynamics[J].Energies,2019,12(1):52.
[16]杜龔.載貨汽車質(zhì)量及路面坡度估計方法研究[D].西安:長安大學(xué),2017.
DU Gong.Research on the Estimation of Mass for Truck and Road Slope[D].Xi′an:Chang′an University,2017.
[17]楊坤,高松,王杰,等.基于EMB的解耦式制動能量回收系統(tǒng)研究[J].汽車工程,2016,38(9):1072-1079.
YANG Kun,GAO Song,WANG Jie,et al.A study of decoupled brake energy recovery system based on electro-mechanical brake[J].Automotive Engineering,2016,38(9):1072-1079.
[18]高博麟.重型車與液力緩速器匹配特性的仿真研究[D].長春:吉林大學(xué),2009.
GAO Bolin.Simulation Study on the Matching Performance of Heavy Vehicles and Hydraulic Retarders[D].Changchun:Jilin University,2009.
[19]GB/T 27840—2011,重型商用車燃料消耗量測量方法[S].
[20]高志偉,李德勝,葉樂志,等.帶電渦流緩速車橋的鉸接車輛制動穩(wěn)定性研究[J].汽車工程,2020,42(7):917-924.
GAO Zhiwei,LI Desheng,YE Lezhi,et al.Study on braking stability of articulated vehicle with eddy current retarder axle[J].Automotive Engineering,2020,42(7):917-924.
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機(jī)與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
