基于混沌鯨魚算法的自抗擾永磁同步電機控制
2021-09-10 05:19:56孫家文張齊文孫永哲孫仁盛馮威
內燃機與配件 2021年12期
關鍵詞:永磁同步電機
孫家文 張齊文 孫永哲 孫仁盛 馮威



摘要:針對永磁同步電機由于強耦合、非線性的特點,導致任何不確定性擾動都會直接影響控制系統性能的問題,設計了一種改進鯨魚算法優化的二階自抗擾控制器。通過采用混沌初始化策略改進鯨魚算法優化自抗擾控制器參數。經過優化的自抗擾控制器的控制其性能有明顯提高。仿真結果表明,該自抗擾控制器響應速度快,穩態誤差小且無超調,對負載擾動具有良好的魯棒性。
Abstract: Because of the strong coupling and nonlinear characteristics of PMSM, any uncertainty disturbance will directly affect the performance of the control system. A second-order auto-disturbance rejection controller with improved whale algorithm optimization is designed. The whale algorithm is optimized to optimize the parameters of the auto-disturbance rejection controller by adopting an adaptive cross-compilation strategy and a chaotic initialization strategy. The optimized auto-disturbance rejection controller has significantly improved performance. The simulation results show that the auto-disturbance rejection controller has fast response, small steady-state error and no overshoot, and it has good robustness to load disturbance.
關鍵詞:永磁同步電機;鯨魚優化算法;混沌序列;參數整定
Key words: permanent magnet synchronous motor;whale optimization algorithm;chaotic sequence;parameter setting
中圖分類號:TM28? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1674-957X(2021)12-0084-03
0? 引言
傳統的永磁同步電機(Permanent Magnet Linear Synchronous Motor,PMSM)矢量控制系統,控制器采用PI控制,但由于PI控制器本身初始誤差大,超調與快速響應相互影響,微分信號易失真,易產生振蕩和控制量飽。因此不僅會影響控制精度且當系統受到外界擾動時,很難對擾動進行補償,影響系統的動態性能。針對上述問題,李曉寧等提出了一種基于單神經元的永磁同步電機解耦控制策略,構建了基于單神經元的永磁同步電機解耦控制系統[1]。章瑋等提出了一種基于降階負載擾動觀測器的永磁同步電機前饋控制方法,有效地提升永磁同步電動機轉速控制的魯棒性[2]。祁春清等提出了一種基于粒子群優化模糊控制器永磁同步電機控制,利用粒子群算法對模糊控制器的3個比例因子參數進行全局優化,以使系統能夠很好的跟蹤負載變化,動態響應快,速度跟隨準確[3]。以上方法雖然在系統動態性能上有所改善,但PMLSM在運行過程中存在參數變化和負載擾動等問題均沒有得到合理的解決。自抗擾(Auto Disturbance Rejection Control,ADRC)[4]控制器不依賴于被控對象的模型且具有很強的抗干擾能力。其響應速度快,可根據輸入輸出數據,實時估計并補償系統各種內外擾動。然而,ADRC內部參數眾多且整定困難,且參數整定結果會直接影響系統的控制性能,傳統的經驗整定法很難使ADRC可以實際有效的應用于復雜的控制系統中。因此,許多學者提出了一些ADRC智能參數整定策略。劉福才等提出了一種改進混沌粒子群算法,目的是通過混沌系列初始化粒子的速度和位置,提高種群的多樣性,避免粒子在優化過程中陷入局部最優[5]。楊婷婷等提出了一種基于粒子群算法的自抗擾控制策略,有效的提高了自抗擾控制器的控制性能[6]。
1? 永磁同步電機自抗擾控制
1.1 永磁同步直線電機模型
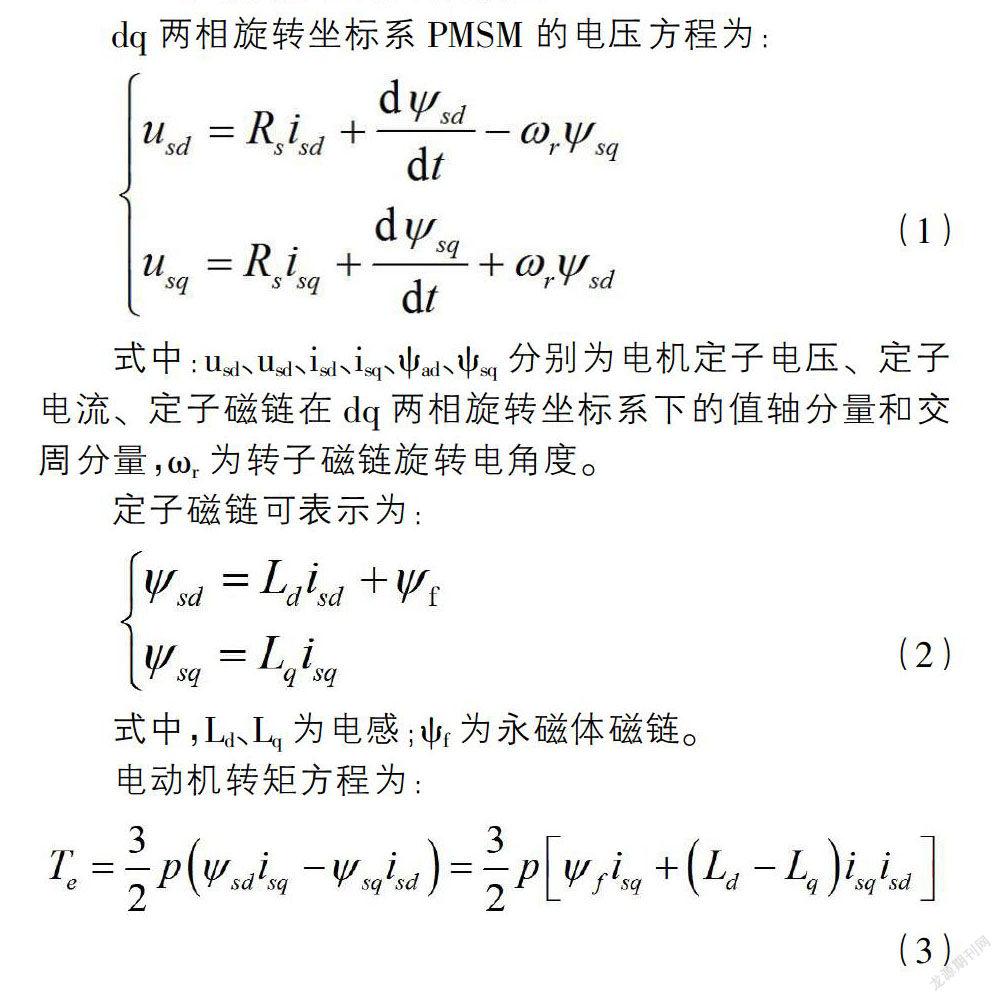
dq兩相旋轉坐標系PMSM的電壓方程為:
式中:usd、usd、isd、isq、?鬃ad、?鬃sq分別為電機定子電壓、定子電流、定子磁鏈在dq兩相旋轉坐標系下的值軸分量和交周分量,?棕r為轉子磁鏈旋轉電角度。
定子磁鏈可表示為:
式中,Ld、Lq為電感;?鬃f為永磁體磁鏈。
電動機轉矩方程為:
式中,Te為電磁轉矩。
1.2 自抗擾位置控制器設計
自抗擾控制器主要由過渡安排過程(TD),ESO,NLSEF和擾動估計補償四部分組成。其控制器結構如下。
TD給出過渡過程v1及其微分v2:
擴張狀態觀測器是自抗擾控制器的核心部分,跟蹤對象輸出y并估計對象的各階狀態變量z1和z2,和對象總擾動實時作用量z3;b是控制輸入放大系數。對應的具體方程形式如下:
非線性反饋控制率是安排的過渡過程與對象狀態變量之間誤差的非線性控制策略,對e1和e2進行非線性組合并輸出控制信號u0:
式中:r是快慢因子,對其過渡過程的快慢起到決定性作用;h是步長;h0是濾波因子,具有濾波作用。?茁01、?茁02、?茁03、?琢1、?琢2、b0、?啄1、?啄2是ESO中的待整定參數。
2? 基于改進鯨魚優化算法的永磁同步電機自抗擾控制器
2.1 標準鯨魚優化算法
鯨魚優化算法(Whale Optimization Algorithm,簡稱WOA)是一種新型優化算法,其算法流程借鑒了座頭鯨的狩獵行為。基本鯨魚優化算法的位置更新公式可以描述為:
其中Dp=X*(t)-X(t)表示鯨魚和獵物之間的距離;X*(t)表示所有迭代至今為止最好的位置向量;b為常數,用來定義螺線的形狀;l是(-1,1)中的隨機數;A=2A×r1-a為系數,C=2×r2為另一個系數;a=2-2×t/Tmax,式中r1和r2是(0,1)中的隨機數,a的值從2到0線性下降,t表示當前的迭代次數,Tmax為最大迭代次數。
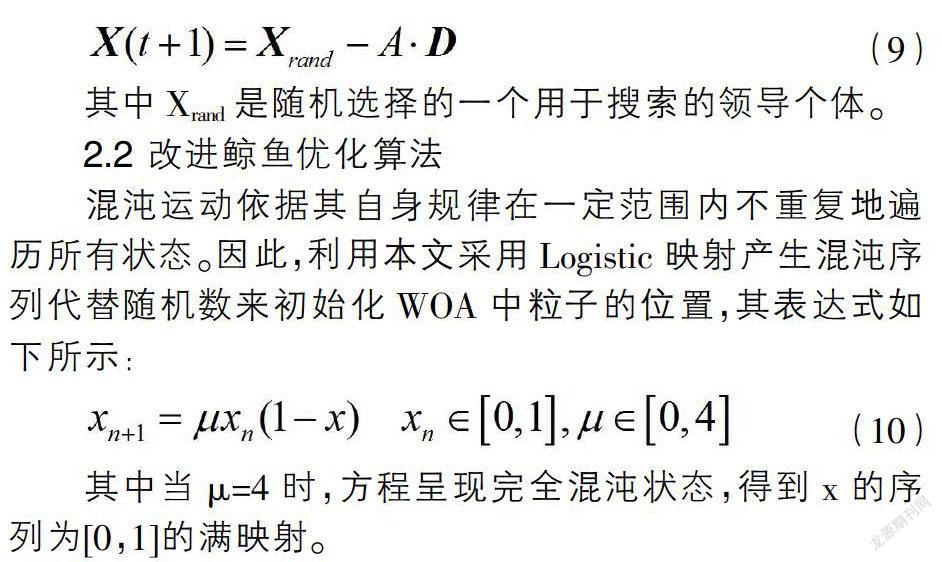
鯨魚采用隨機搜索的方式狩獵獵物,其D和X(t+1)的更新公式如下:
其中Xrand是隨機選擇的一個用于搜索的領導個體。
2.2 改進鯨魚優化算法
混沌運動依據其自身規律在一定范圍內不重復地遍歷所有狀態。因此,利用本文采用Logistic映射產生混沌序列代替隨機數來初始化WOA中粒子的位置,其表達式如下所示:
其中當?滋=4時,方程呈現完全混沌狀態,得到x的序列為[0,1]的滿映射。
3? 基于實際算例的仿真對比
為驗證速度環控制策略的可行性,本文在maltab環境下進行仿真,其控制結構如圖1所示。
其中ADRC中待整定參數通過本文所提CWOA在線整定,整定后的參數為:?茁1=31.18,?茁2=27.98,?茁01=97.15,?茁02=291.99,?茁03=94.77。PMSM的參為:Rs=1.85?贅,Rr=2.68/?贅,Ls=0.294H,Lm=0.2838H,J=0.1284Nm·s2,np=2,UN=380V,fN=50Hz。
為驗證CWOA-ADRC控制器的控制效果,同樣條件下,與AWOA-ADRC控制器進行對比仿真實驗。電機工作在不同工況下,給定轉速信號可以分為空載、負載兩種情況。具體的仿真實驗結果如下所述。
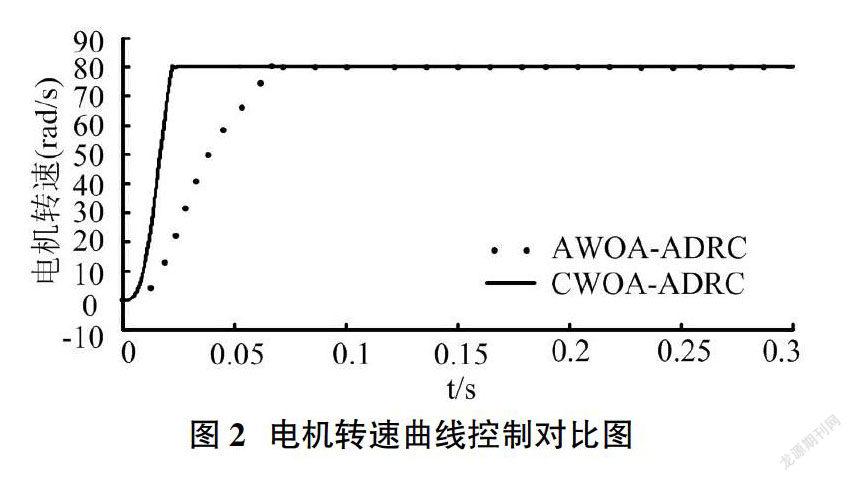
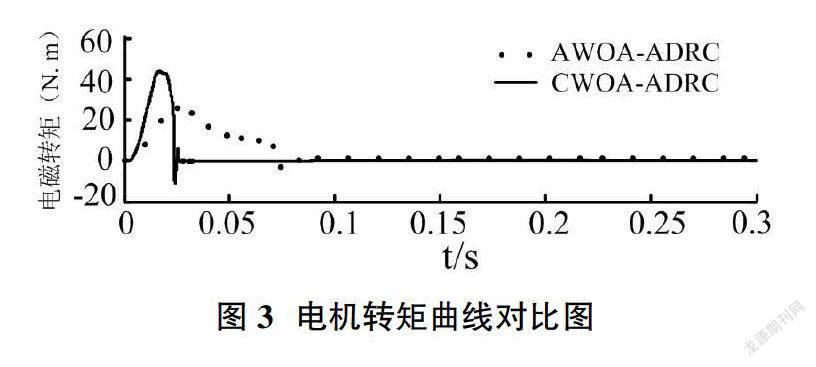
①在空載條件下起動電機,t=0時,給定電機轉速為80rad/s的階躍信號,兩種控制方式下的階躍給定電機轉速動態響應和電磁轉矩曲線分別如圖2和圖3所示。
由圖2可知,CWOA-ADRC控制下的電機轉速曲線相較AWOA-ADRC控制下的電機轉速曲線可以在較短時間內到穩定狀態,且不足0.5s,調節時間較短。由圖3可知,CWOA-ADRC控制下的電機電磁轉矩相較AWOA-ADRC能更快到達最大轉矩狀態。
4? 結論
針對PMSM控制系統高度非線性、強耦合,易受到擾動從而影響控制品質的問題,提出了一種基于混沌序列以及自適應交叉變異策略改進的鯨魚優化算法(CWOA),在線整定ADRC參數。通過與AWOA算法優化的自抗擾控制器的比較,應用CWOA的PMSM自抗擾控制器具有更佳的控制品質。
參考文獻:
[1]李曉寧,趙現楓,黃大貴,邵偉.基于單神經元的永磁同步電機解耦控制[J].控制理論與應用,2012,29(07):933-939.
[2]章瑋,王偉穎.基于降階負載擾動觀測器的永磁同步電機控制[J].機電工程,2012,29(07):821-824,832.
[3]祁春清,宋正強.基于粒子群優化模糊控制器永磁同步電機控制[J].中國電機工程學報,2006(17):158-162.
[4]李杰,齊曉慧,夏元清,高志強.線性/非線性自抗擾切換控制方法研究[J].自動化學報,2016,42(02):202-212.
[5]劉福才,賈亞飛,任麗娜.基于混沌粒子群優化算法的異結構混沌反同步自抗擾控制[J].物理學報,2013,62(12):98-105.
[6]楊婷婷,李愛軍,侯震.基于粒子群算法的自抗擾飛行控制器優化設計[J].計算機仿真,2009,26(9):59-61.
[7]牛培峰,吳志良,馬云鵬,史春見,李進柏.基于鯨魚優化算法的汽輪機熱耗率模型預測[J].化工學報,2017,68(03):1049-1057.
[8]MIRJALILI S, LEWIS A. The Whale Optimization Algorithm[J]. Advances in Engineering Software, 2016, 95:51-67.
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49