基于BIM技術(shù)的運(yùn)維點(diǎn)檢路徑規(guī)劃研究
2021-09-10 07:22:44吉翔彭有剛李海敬少民彭馮杰
智能建筑與工程機(jī)械 2021年1期
吉翔 彭有剛 李海 敬少民 彭馮杰

摘? 要:本文以某光學(xué)元件基地為例,研究基于BIM模型的室內(nèi)路徑規(guī)劃技術(shù)。首先建立建筑物BIM參數(shù)化模型,主要通過(guò)由輕能量轉(zhuǎn)換、模型解析、樓層分解以及三角網(wǎng)格劃分等方式,來(lái)構(gòu)成室內(nèi)的基礎(chǔ)路網(wǎng)。基于此,通過(guò)優(yōu)化傳統(tǒng)的路徑規(guī)劃算法實(shí)現(xiàn)多樓層、障礙物自動(dòng)規(guī)避的路徑規(guī)劃,并以HTML5/WebGL技術(shù)為基礎(chǔ),在web端瀏覽器展現(xiàn)三維可視化漫游路徑,為運(yùn)維業(yè)務(wù)提供場(chǎng)景支撐,因此其具有一定的直觀性和實(shí)用性。
關(guān)鍵詞:BIM;路徑規(guī)劃;運(yùn)維;點(diǎn)檢
中圖分類(lèi)號(hào):TU17;TU71? ? ? ? ? ?文獻(xiàn)標(biāo)識(shí)碼:A? ? ? 文章編號(hào):2096-6903(2021)01-0000-00
當(dāng)前,國(guó)內(nèi)外機(jī)構(gòu)對(duì)室內(nèi)路徑規(guī)劃進(jìn)行了一定程度的研究,并取得了一定成果。研究發(fā)現(xiàn),國(guó)內(nèi)室內(nèi)路徑規(guī)劃主要基于二維平面圖,運(yùn)用基于導(dǎo)航網(wǎng)格的A*算法或傳統(tǒng)的Dijkstra算法,存在障礙物邊緣識(shí)別效果不理想,路徑不是最優(yōu)的缺點(diǎn)[1]。
本文借鑒國(guó)內(nèi)外研究思路,將GIS技術(shù)與BIM技術(shù)相融合,通過(guò)提取BIM模型的幾何和語(yǔ)義信息,達(dá)到獲取室內(nèi)可通行區(qū)域的目的,以建筑信息模型為數(shù)據(jù)源,改進(jìn)傳統(tǒng)啟發(fā)式A*尋路算法,進(jìn)行路徑規(guī)劃及可視化展示,實(shí)現(xiàn)室內(nèi)建筑路徑規(guī)劃的最優(yōu)化。
1 項(xiàng)目背景
某光學(xué)元件基地項(xiàng)目占地面積約為133,000m2,建筑面積約為32,800m2,包括6幢單層建筑,其局部2層屋面為鋼結(jié)構(gòu)。本文選取1#樓作為路徑規(guī)劃及可視化展示的區(qū)域,如下圖1所示。
2 創(chuàng)建參數(shù)化路徑規(guī)劃模型
采用Revit創(chuàng)建光學(xué)元件BIM模型,需要保證其構(gòu)件以及屬性星系的完整性,而模型所展現(xiàn)的精度,也必須符合運(yùn)維模型的基本要求,并且能夠以此模型提取的構(gòu)建信息來(lái)作為障礙物識(shí)別,并將其可通行路徑轉(zhuǎn)化為數(shù)據(jù)源[2]。對(duì)于其構(gòu)建信息中所飽含的幾類(lèi)元素信息,主要有以下幾種:
(1)建筑物以及房間內(nèi)部的各個(gè)出口以及入口;
(2)建筑物內(nèi)各樓層平面以及豎向通道,包括樓層層次中各種樓梯;
(3)建筑物內(nèi)空間構(gòu)建,如橫梁,墻面、地板以及走廊等;
(4)建筑物內(nèi)日常運(yùn)轉(zhuǎn)的維護(hù)設(shè)備,如消防以及自控等。
對(duì)于BIM模型的解析,其前提是通過(guò)相關(guān)知識(shí)的構(gòu)建來(lái)實(shí)現(xiàn)路徑規(guī)劃模型的構(gòu)建,再通過(guò)對(duì)其中構(gòu)建信息以及規(guī)劃路徑的提取,來(lái)選擇更為高效和準(zhǔn)確的解析方式。
通過(guò)自主研發(fā)的輕量化工具解析,對(duì)解析對(duì)象模型的幾何信息、關(guān)系信息以及屬性信息進(jìn)行深入的研究,并通過(guò)對(duì)解析而來(lái)的這些信息經(jīng)過(guò)三角網(wǎng)格化的方式進(jìn)行處理。將其構(gòu)建信息和路徑規(guī)劃數(shù)據(jù)通過(guò)JSON的形式儲(chǔ)存于數(shù)據(jù)庫(kù)中。
3 室內(nèi)基礎(chǔ)路網(wǎng)構(gòu)建
Delaunay三角剖分是前蘇聯(lián)數(shù)學(xué)家Delaunay在1934年提出的:“對(duì)于任意給定的平面點(diǎn)集,只存在著唯一的一種三角剖分方法,滿(mǎn)足所謂的“最大—最小角”優(yōu)化準(zhǔn)則,即所有最小內(nèi)角之和最大”[3]。
Delaunay三角剖分廣泛應(yīng)用于數(shù)值分析(比如有限元分析)以及圖形學(xué),室內(nèi)路網(wǎng)的劃分就運(yùn)用到了三角剖分的原理。
對(duì)于包含障礙物的室內(nèi)環(huán)境而言,在對(duì)BIM模型進(jìn)行Delaunay三角剖分時(shí),首先進(jìn)行全局Delaunay三角化,再考慮障礙物區(qū)域,剔除障礙物區(qū)域的三角網(wǎng),得到室內(nèi)可通行區(qū)域,具體步驟如下:
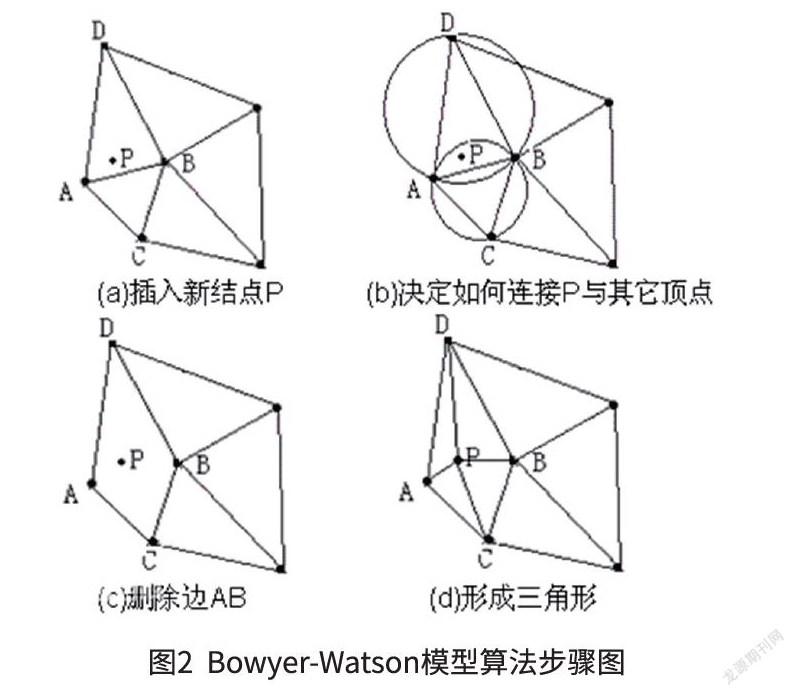
步驟1:隨機(jī)在參數(shù)化路徑規(guī)劃模型中插入離散點(diǎn),采用Bowyer-Watson算法,進(jìn)行模型初始Delaunay三角化。
Bowyer-Watson算法,如下圖2所示,過(guò)程步驟:
(1)通過(guò)構(gòu)建三角模型,將數(shù)據(jù)點(diǎn)進(jìn)行包圍;
(2)通過(guò)引入新的定點(diǎn),通過(guò)新頂點(diǎn)的外圍圓找到其對(duì)應(yīng)三角形;
(3)刪除圓內(nèi)部中間的邊,圍繞新點(diǎn)構(gòu)成新多邊形;
(4)將新頂點(diǎn)與新的多邊形的每一個(gè)頂點(diǎn)進(jìn)行連接,形成新的三角形;
(5)重復(fù)第二步,直至所有的頂點(diǎn)增加完畢。
步驟2:識(shí)別障礙物邊緣,初始三角網(wǎng)被障礙物邊緣切割,將模型中各多變形分解切割為三角形,然后在以步驟1的方式進(jìn)行模型的三角化,如此直到模型中的障礙物與其封閉空間再度呈現(xiàn)三角剖分,進(jìn)而實(shí)現(xiàn)完全Delaunay三角化。
步驟3:將障礙物內(nèi)部的三角形刪除,得到室內(nèi)可通行區(qū)域。
三角網(wǎng)劃分得越精細(xì),室內(nèi)路網(wǎng)形成的路徑越圓滑,三角網(wǎng)劃分完畢后,選取Delaunay三角形的重心作為路徑規(guī)劃模型尋路節(jié)點(diǎn),節(jié)點(diǎn)串聯(lián)起來(lái)形成路徑。
4 路徑規(guī)劃算法優(yōu)化
對(duì)于室內(nèi)環(huán)境下的路徑規(guī)劃,首先需要結(jié)合建筑內(nèi)部的空間結(jié)構(gòu)、樓層銜接等重要因素來(lái)考慮其路徑規(guī)劃的算法,其次再根據(jù)其建筑物內(nèi)部建筑提點(diǎn),自其算法原理以及室內(nèi)尋路效率的角度,對(duì)其傳統(tǒng)的路徑規(guī)劃算法如Dijkstra算法、Ant算法、A*算法等進(jìn)行綜合分析和比較,見(jiàn)表1。
通過(guò)對(duì)當(dāng)前主流路徑規(guī)劃算法的使用場(chǎng)景以及優(yōu)缺點(diǎn)進(jìn)行相應(yīng)的對(duì)比分析,結(jié)合其項(xiàng)目的實(shí)際需求,筆者最終選用傳統(tǒng)啟發(fā)式A*尋路算法作為建筑內(nèi)空間關(guān)系的室內(nèi)路徑規(guī)劃算法。
在對(duì)模型進(jìn)行信息提取后,首先需要進(jìn)行Delaunay三角剖分處理,形成參數(shù)化路徑規(guī)劃子模型,結(jié)合室內(nèi)的障礙物分布情況以及各樓層的空間銜接關(guān)系,將建筑內(nèi)路徑規(guī)劃分為單層尋路和多層尋路兩種空間尋路類(lèi)型進(jìn)行考慮[4]:
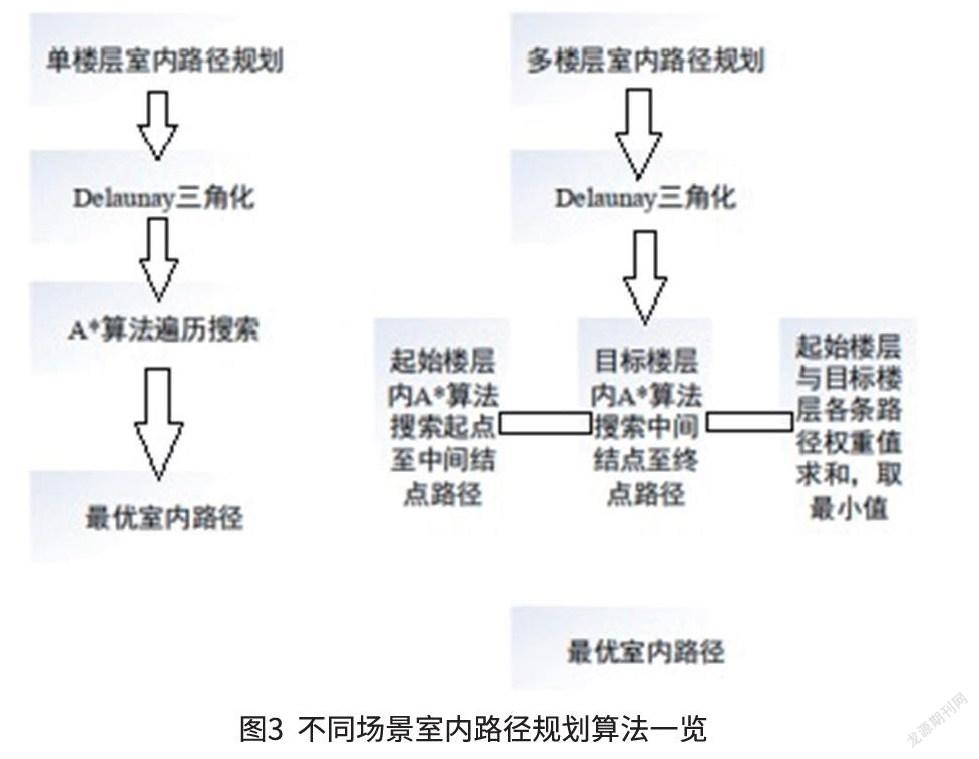
(1)單樓層尋路:通過(guò)對(duì)BIM模型進(jìn)行Delaunay三角化后,識(shí)別障礙物,形成可通行區(qū)域,采用傳統(tǒng)A*算法進(jìn)行路徑搜索算出多條路徑,并通過(guò)路徑評(píng)價(jià)方案確定最優(yōu)通行路徑,如下圖3所示。
(2)多樓層尋路,分別對(duì)起點(diǎn)樓層和終點(diǎn)樓層進(jìn)行Delaunay三角剖分,將室內(nèi)的樓梯作為路徑規(guī)劃的中間節(jié)點(diǎn),在此基礎(chǔ)上,用A*算法分別搜索起點(diǎn)至中間節(jié)點(diǎn)路徑,中間節(jié)點(diǎn)至終點(diǎn)樓層路徑。最終通過(guò)對(duì)各樓層內(nèi)路徑進(jìn)行最優(yōu)評(píng)價(jià),進(jìn)行路徑權(quán)重求和、匯總和比較,篩選最小值,將兩條路徑與中間節(jié)點(diǎn)連接起來(lái)構(gòu)成從起始節(jié)點(diǎn)至終止節(jié)點(diǎn)的最優(yōu)路徑,其權(quán)重值就是該條路徑的實(shí)際代價(jià)值[5]。
5 可視化路徑展示
對(duì)于BIM的操作應(yīng)用來(lái)說(shuō),其正常的開(kāi)展都是需要在三維可視化的環(huán)境中進(jìn)行的。
在BIM操作中,其應(yīng)用均是在三維可視化的環(huán)境下展現(xiàn)出來(lái)的,對(duì)于其漫游、旋轉(zhuǎn)、剖切、縮放等操作。通過(guò)對(duì)可視化平臺(tái)的利用,建筑物整體的形態(tài),室內(nèi)的路進(jìn)信息等數(shù)據(jù)會(huì)得以直觀表達(dá),并且還能夠根據(jù)其對(duì)應(yīng)的快速查詢(xún)?cè)O(shè)備來(lái)幫助運(yùn)維人員處理日常的巡檢任務(wù)。
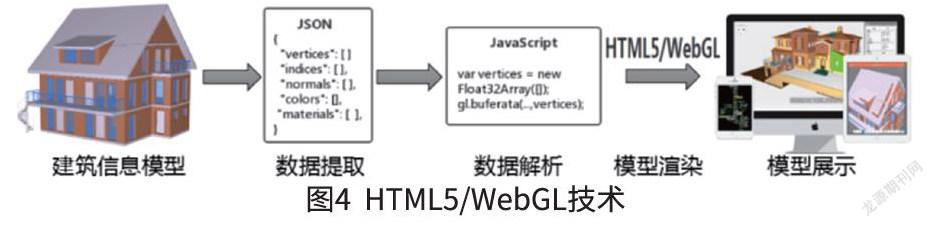
采用WebGL技術(shù)可實(shí)現(xiàn)路徑導(dǎo)航三維可視化展示,WebGL屬于一種3D繪圖協(xié)議,全稱(chēng)寫(xiě)為Web Graphics Library[6]。該繪圖協(xié)議中,將JavaScript和OpenGL ES 2.0結(jié)合到了一起,并通過(guò)讓兩者之間增加一個(gè)綁定,來(lái)使得WebGL能夠?yàn)镠TML5 Canvas提供對(duì)應(yīng)的硬件3D加速渲染。如此也省去了對(duì)相應(yīng)渲染插件的開(kāi)發(fā),通過(guò)借助系統(tǒng)顯卡對(duì)其中的3D場(chǎng)景以及模型進(jìn)行流暢的展示來(lái)創(chuàng)建出復(fù)雜的導(dǎo)航以及數(shù)據(jù)視覺(jué)效果。
在HTML5/WebGL技術(shù)的使用過(guò)程中,能將系統(tǒng)數(shù)據(jù)庫(kù)內(nèi)部如走廊、門(mén)、窗等的相關(guān)構(gòu)件數(shù)據(jù)通過(guò)以JSON的格式進(jìn)行提取解析,并在JavaScript中開(kāi)始對(duì)應(yīng)的圖形渲染,從而達(dá)到對(duì)室內(nèi)場(chǎng)景的可視化展示,如下圖4所示。
通過(guò)對(duì)光學(xué)元件6#樓模型按樓層進(jìn)行分解,完成Delaunay三角剖分,識(shí)別樓層內(nèi)障礙物,構(gòu)建室內(nèi)基礎(chǔ)路網(wǎng),選取Delaunay三角形的重心作為尋路節(jié)點(diǎn),計(jì)算出最優(yōu)點(diǎn)檢路徑,在路徑導(dǎo)航過(guò)程中可以通過(guò)點(diǎn)擊模型構(gòu)件查詢(xún)路徑所經(jīng)過(guò)的消防設(shè)備、自控設(shè)備等信息[7]。
6 結(jié)語(yǔ)
本文通過(guò)解析BIM模型語(yǔ)義,通過(guò)對(duì)其中的輕能量轉(zhuǎn)換問(wèn)題、樓層解析以及分解問(wèn)題以及三角網(wǎng)格劃分問(wèn)題的處理以此形成室內(nèi)的基礎(chǔ)路網(wǎng)。在此基礎(chǔ)上,優(yōu)化傳統(tǒng)的路徑規(guī)劃算法實(shí)現(xiàn)多樓層、障礙物自動(dòng)規(guī)避的路徑規(guī)劃。以HTML5/WebGL的操作技術(shù)為基礎(chǔ),通過(guò)瀏覽器可三維可視化展示其對(duì)應(yīng)的漫游路徑,為運(yùn)維業(yè)務(wù)提供場(chǎng)景支撐,因此具有一定的借鑒價(jià)值。
參考文獻(xiàn)
[1] 高媛,王勇,崔恒東,等.BIM與物聯(lián)網(wǎng)技術(shù)在綜合管廊設(shè)備運(yùn)維管理中的應(yīng)用[J].智能建筑與智慧城市,2020(11):101-104.
[2] 李謐,賀曉鋼,李博涵,等.基于BIM+GIS的市政工程規(guī)建管一體化應(yīng)用研究[J].地下空間與工程學(xué)報(bào),2020,16(S2):527-539.
[3] 張陽(yáng).基于國(guó)內(nèi)BIM運(yùn)維管理研究綜述[J].城市建筑,2020,17(30):191-193.
[4] 尹成福,陳小銳.BIM技術(shù)在526國(guó)道改建工程建管養(yǎng)全過(guò)程中的應(yīng)用[J].四川水力發(fā)電,2020,39(5):118-121+130.
[5] 唐多瓊.BIM技術(shù)在IDC數(shù)據(jù)中心的應(yīng)用[J].信息通信,2020(10):228-230.
[6] 王凡,李鐵軍,劉今越,等.基于BIM的建筑機(jī)器人自主路徑規(guī)劃及避障研究[J].計(jì)算機(jī)工程與應(yīng)用,2020,56(17):224-230.
[7] 何磊.基于BIM的建筑消防疏散路徑規(guī)劃分析[J].消防界(電子版),2019,5(12):16.
收稿日期:2020-11-21
作者簡(jiǎn)介:吉翔(1982—),男,四川成都人,本科,工程師,研究方向:電氣工程自動(dòng)化。
A Study on Path Planning of Operation and Maintenance Spot Inspection Based on BIM Technology
JI Xiang,PENG Yougang,LI Hai,JING Shaomin,PENG Fengjie
(Laser Fusion Research Center, China Institute of Engineering Physics,Mianyang Sichuan 621900)
Abstract: This article takes an optical component base as an example to study the indoor path planning technology based on the BIM model. First, establish a BIM parameterized model of the building, and form the basic indoor road network through lightweight conversion, model analysis, floor decomposition, and triangular grid division. On this basis, the traditional path planning algorithm is optimized to achieve multiple floors and obstacles. Based on HTML5/WebGL technology, the three-dimensional visual display of the roaming path is displayed on the Web browser to provide scene support for the operation and maintenance business, therefore,which is intuitive and practical.
Keywords: BIM;path planning;operation and maintenance;spot inspection
