石墨烯驅動器的設計及性能研究
2021-09-15 02:43:56王可勝姜心成
科技視界 2021年23期
李 潤 李 亨,* 王可勝 姜心成
(1.合肥工業大學航空結構件成形制造與裝備安徽省重點實驗室,安徽 合肥230009;2.合肥中南光電有限公司,安徽 合肥231600)
0 引言
柔性智能驅動器能將外部能量轉換為機械能輸出,在人工肌肉、仿生軟體機器人、生物醫學設備等領域具有廣泛的潛在應用,因而受到了極大的關注[1]。到目前為止,已經實現了利用各種外部刺激,包括電、光以及磁場等驅動的柔性智能驅動器。其中,驅動器通過光或電驅動的方式因其獨特的特點而引起廣泛的研究。對于電響應驅動器,電刺激很容易獲得,操作簡單可控。對于光響應驅動器,可以實現無線通信驅動,遠程控制,且豐富的光源尤其是自然界無盡的太陽光彌補了電驅動的缺點。因此這兩種類型的驅動器可以相互補償進一步擴大實際應用。然而,大多數驅動器通常只能響應其中一種刺激,這表明了對雙響應驅動器的探究是非常重要的。
材料成分是柔性驅動器設計的重要因素。石墨烯具有二維結構[2],優異的電熱轉換以及光熱轉換特點,已經得到了廣泛的研究和應用。盡管石墨烯可以通過能量轉換產生的熱效應使自身產生機械變形,但它們需要結合熱膨脹材料來制備柔性驅動器。此外,在含聚合物的雙層薄膜復合結構中,聚合物通常作為軟質材料在復合結構中作為膨脹層,起到受熱膨脹的作用。在這項工作中,利用石墨烯的電熱轉換特性、聚合物的熱膨脹性能與雙層結構設計相結合,制備了一種石墨烯基驅動器。通過滴涂法制備石墨烯膜,接著將石墨烯粘貼在PET膜上。該制備方法快速易操作,且制備的石墨烯/聚合物雙層薄膜驅動器可以對電和光刺激產生雙響應變形。該雙層薄膜驅動器可以將電能和光能轉換成熱能,電刺激下能夠快速的響應變形,在8秒內可以產生約5 mm的變形位移,同時該驅動器也實現了光照刺激下,在8秒內產生約6 mm的變形位移。由于該驅動器優良的驅動性能,該類型的雙層薄膜驅動器可以用于設計仿生智能器件。我們設計了一朵人造花,在光刺激下展開,撤掉光源回復到原始形狀。這些結果表明石墨烯雙層薄膜驅動器在人工肌肉,軟體機器人領域具有潛在的應用前景。
1 驅動器制備及表征
1.1 石墨烯/聚合物雙層薄膜驅動器的制備過程
還原氧化石墨烯薄膜的制備:氧化石墨烯溶液購自南京先豐納米材料科技有限公司,購得厚度為60μm的PET自黏膜。氫碘酸是購自國藥化學試劑有限公司。氧化石墨烯膜是通過滴加10 ml氧化石墨烯溶液(2 mg mL-1)在玻璃片上,然后在60°C下干燥。所得氧化石墨烯膜浸入氫碘酸溶液中1小時,獲得還原的氧化石墨烯膜。接著,將還原的氧化石墨烯膜用乙醇反復清洗,以去除殘留的氫碘酸,得到所需的石墨烯膜。
石墨烯聚合物雙層薄膜驅動器的制備:在還原的氧化石墨烯膜上直接復合黏性的聚合物膜(PET)。然后將石墨烯聚合物雙層薄膜驅動器切割成預先設計的形狀,以滿足在實驗中的需求。
1.2 石墨烯膜的表征
氧化石墨烯具有和石墨烯相似的單分子層的二維網絡結構。不同的是,在氧化石墨烯表面存在大量的極性含氧官能團如羥基、環氧基和羧基等,這些含氧官能團的存在增加了石墨烯結構的復雜性。石墨烯膜擁有很好的層狀結構,且呈波紋狀。這種結構與含氧官能團的引入有很大關系。基團間通過氫鍵相連,所以其在縱向可以形成很好的層狀結構。石墨烯膜具有和氧化石墨烯相同的層狀結構,其表面粗糙,原因可能是氫碘酸進入氧化石墨烯夾層發生氧化還原反應,導致表面出現大量褶皺。
2 驅動器驅動機理
雙層薄膜驅動器產生彎曲變形的原因是由于兩層薄膜材料的熱膨脹系數差異所導致的,熱膨脹系數差異越大,整體的彎曲變形越大。為了使雙層薄膜結構的驅動器實現較大的彎曲變形,理想的設計是使其中一層具有正的熱膨脹系數,能夠受熱膨脹,而另一層具有受熱后收縮的性能,這種結構設計可以使熱膨脹系數差異最大化,最終的機械變形輸出也最大。根據此驅動機理,我們設計了石墨烯/聚合物雙層薄膜驅動器,在此雙層薄膜結構中,聚合物(PET)的熱膨脹系數(CTE≈60×10-6K-1)較大,而另外一層石墨烯薄膜熱膨脹系數為負且擁有獨特的熱收縮性能,由不同熱膨脹系數材料組成的雙層薄膜結構在受熱時雙層薄膜之間產生熱變形失配,最終雙層薄膜結構整體向石墨烯層彎曲。
對石墨烯聚合物雙層薄膜驅動器的電驅動性能進行了研究。為了形成電流流通回路,雙層薄膜結構被切割成U型形狀。U型石墨烯聚合物雙層薄膜驅動器的開口端用導電銀膠連接并固定到電極上,使另一端可自由變形。其中,石墨烯作為電熱轉換元件,使施加于雙層薄膜驅動器電極兩端的電壓通過石墨烯層的電阻轉化為焦耳熱,同時,由于聚合物層與石墨烯層之間良好的界面結合,石墨烯層所產生的熱量可以快速有效地傳遞到聚合物層,導致聚合物層受熱膨脹。在收縮層與膨脹層的協同作用下,石墨烯聚合物雙層結構在電刺激下向石墨烯側彎曲。當電輸入中斷后,熱量停止產生并且逐漸向周圍環境消散,導致雙層結構逐漸恢復到初始的位置。
3 實驗結果分析
3.1 電響應驅動
我們探究了石墨烯/聚合物雙層薄膜驅動器的電驅動性能。當對石墨烯/聚合物雙層薄膜驅動器施加12 V的驅動電壓,在U型回路中能夠產生約60 mA的電流,導致雙層薄膜驅動器產生焦耳熱。因此,驅動器向石墨烯側彎曲。電刺激8秒后,這種雙層薄膜驅動器的位移變化約為5 mm,當關閉電源后7秒后驅動器回復原形,隨著施加的驅動電壓從4V增加到12 V,驅動位移也在逐漸增大。圖1a和圖1b表示在驅動電壓4 V、6 V、8 V、10 V、12 V下,驅動器的最大彎曲位移與最大溫度之間的關系。由圖可知,驅動器的溫度變化與變形位移的變化基本一致。在電熱效應中,輸出的熱能取決于輸入電源的大小,該驅動器在增加驅動電壓的同時溫度的升高可以清楚地觀察到,進一步揭示當電壓施加在電極上時的電熱效應。隨著電壓的增加,導致雙層薄膜驅動器產生更大的熱響應變形,驅動器的變形位移也越大,因此可以通過調整驅動電壓來控制變形位移的大小。
3.2 光響應驅動
為了實現光驅動,在驅動之前將驅動器裁剪成矩型形狀,此驅動器的上端固定在玻璃片上,另一端可以自由變形。當模擬太陽光的光源從右側照射,驅動器向石墨烯側彎曲,并在8秒內產生約6 mm的彎曲位移,撤掉光源時在6秒內完全回復到原始形狀,展示了該驅動器的光學驅動也是完全可逆的。該驅動器的變形幅度可以通過調節光照強度來進行調控。圖1c和圖1d給出了光驅動過程中詳細的位移與溫度的變化,驅動器的位移變化隨著光照強度從73 mW cm-2增加到208 mW cm-2,彎曲位移也逐漸變大,彎曲位移的變化和溫度變化一致,證實了該驅動器的驅動主要是因為光熱效應。在石墨烯/聚合物的雙層薄膜驅動器上,石墨烯吸收光并轉化為熱能,由于良好的介面接觸導致聚合物膜可以快速地接收到石墨烯的熱能使得雙層膜的溫度升高,石墨烯/聚合物雙層薄膜驅動器整體產生彎曲。
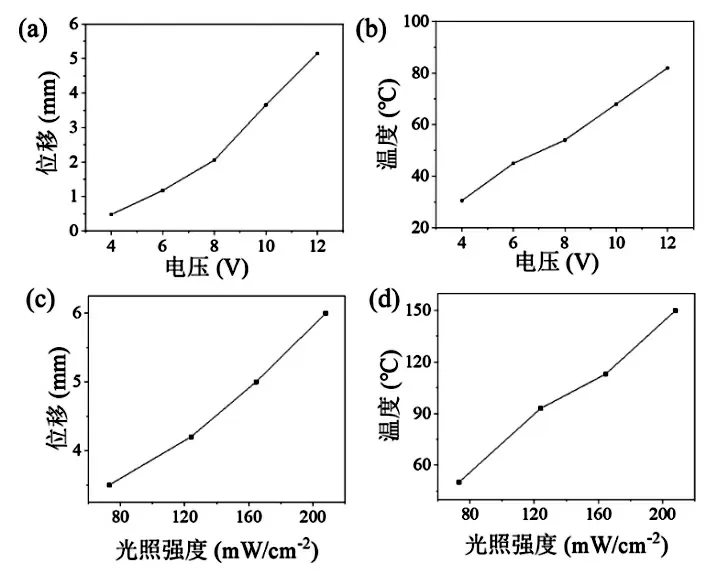
圖1 驅動器的電/光驅動性能
由于石墨烯/聚合物雙層薄膜驅動器具有響應速度快,相對較低的工作溫度以及光/電刺激雙響應的特點,特別是該驅動器的雙響應特性在仿生領域可以進一步擴大其應用范圍。為了證明其在仿生領域的應用,在這里,我們設計了一種具有光響應特點的人造花。如圖3所示,這朵花由四塊石墨烯/聚合物雙層薄膜驅動器組成,在無任何外部刺激的情況下是處于閉合狀態。當施加光照刺激,在2秒內快速響應,花瓣展開,當撤銷光照刺激時,在3秒內快速回復到原始形狀。

圖2 光驅動下花朵的開放
4 結論
本文利用具有優異的電熱和光熱轉換性能的石墨烯和具有良好的熱膨脹系數的聚合物制備了雙響應的薄膜驅動器。該類型的柔性驅動器響應速度快且變形可逆,歸因于石墨烯的電熱和光熱轉換能力,聚合物的熱膨脹特性以及雙層薄膜結構。施加12 V的低電壓刺激,該驅動器能夠在8秒內產生5 mm的彎曲位移,光照后,該驅動器能夠在8秒內產生6 mm的位移。基于這種雙響應驅動器,設計了一朵人造花,它能夠在光刺激下開花,并且在撤銷外部的光照刺激后,能夠回復到原始形狀。這些結果顯示了石墨烯/聚合物雙層薄膜驅動器在先進的智能仿生器件中具有良好的應用前景。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2020年1期)2020-09-21 09:24:52
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
