PLC在農業智能電機保護系統中的設計應用
2021-09-25 08:45:26張新軍
農業技術與裝備 2021年7期
張新軍
(濟源職業技術學院,河南 濟源 459000)
1 PLC在農業智能電機保護系統中的設計
1.1 保護系統總體結構設計
農業智能電機保護系統的總體結構主要由主體模塊、顯示模塊和主體擴展模塊[1]三部分構成。另外,控制器是農業智能電機保護系統中的必選部分,主要作用是測量電流、控制電機運行、保護電機工作。顯示模塊與主體擴展模塊是可選模塊。顯示模塊不僅能夠顯示出多種信息,例如控制器故障、測量結果以及報警,還能修改保護定值、設定系統參數、控制電機運行等。主體擴展模塊可以測量電路電壓。
1.2 PLC模塊設計
農業智能電機保護系統的核心控制部分是PLC模塊,由超聲波測量設備、電機及其驅動器、PLC控制器、預警、按鍵、編碼器等硬件構成[2]。PLC控制器可直接獲取開關量信號,并且獲取和傳遞數字信號,同時接收傳感器轉換以后的信號。PLC控制器直接控制電機的運行與停止。控制功能可以控制電機的啟動方式、行為,還可及時停止農業電機作業,保障安全,快速排查故障。
1.3 軟件設計
農業智能電機保護系統中進行監控和測量工作的軟件設計。通常情況下,農業智能電機保護器在測量出電路的電流電壓數據時,會實施一些常規量保護,比如記錄5條故障信息,處理電路中常見的欠壓、過壓、欠流、過流等問題[3]。在設計保護系統軟件的過程中,根據檢測到的結果MCU及時更新寄存器信息,再計算出保護數據、分析故障情況、采取保護措施,最后顯示在HMI或上位機。
農業智能電機保護系統的遠程通訊軟件設計。在遠程通訊軟件中,把保護器設為MODBUS的從機,時刻記錄電機的運行狀態或控制命令的信息,并將具體數據存儲在系統設定的寄存器中。工業的通用標準協議逐漸增多,例如MODBUS、ETHERNET、UART等協議。其中MODBUS協議為通訊協議,應用于OSI七層網絡模型應用層,能夠完成控制器和控制器之間的通訊,借助網絡技術使PLC控制器與其他設備通信。雖然每個廠家生產出來的控制設備型號不一致,但在MODBUS協議的引導下已經構建成一個工業網絡,能夠實現對數據的集中監控。同時,MODBUS協議設置了統一的消息結構,便于農業機械產品間交換請求數據、偵測錯誤的記錄數據、響應數據等。
1.4 功能設計
農業智能電機保護系統測量功能設計。保護系統需要測量接地故障電流、線電流、線間電壓、功率、損耗、電機溫度傳感器等多種信息[4]。一切保護系統測量到的數據均需要儲存在指定的寄存器中,可被用于計算是否需要做出保護。電機電壓參數由系統擴展模塊測量。電壓測量項主要有相電壓、電壓負載脫落以及欠壓過壓。電流測量項主要有相電流、長時間啟動、短周期循環、超溫過載、地漏電流、欠載或過載電流等內容。功率測量項主要有低或高功率因素、欠功率與過功率。
農業智能電機保護系統保護功能設計。農業智能電機主要通過PLC控制器發揮保護作用,檢測整個電路的電壓和電流,計算各種保護閾值[5]。若系統處于保護狀態,則說明某一處的電壓或電流或其他保護參數值已經超出了事先設定的范圍。在這種情況下,PLC控制器會在控制面板上顯示故障信號提示用戶,并關閉輸出繼電器,使農業電機處于停止運行狀態。電壓保護功能主要表現為電壓缺相保護、電壓相不平衡保護、自動重啟(降壓管理)等。電流保護功能最主要是在發生電流反相、長啟動、過頻啟動、電流缺相等問題后,能夠有效保護系統及機器。功率保護功能主要為過功率或欠功率因素保護、過功率或欠功率保護。熱保護功能主要為定時限熱保護、反時限熱保護等。
農業智能電機保護系統控制功能設計。保護系統的關鍵在于控制,控制電機的操作方式、運行模式、解決故障等。電機運行狀態由PLC控制器顯示、控制與保護,確保電機可做出準備、運行、啟動及報警狀態。運行模式有雙步、過載、雙速、可逆形式、正轉獨立形式5種特定模式,與用戶自由編寫邏輯控制輸出模式。控制模式共有3種,分別是人機操作控制、本地端口控制、遠程網絡控制。處理故障的方式有手動復位、自動復位、遠程復位等。
2 試驗分析
2.1 FMEA風險檢測
FMEA風險檢測需要分析每項農業電機作業有可能產生的故障情況,并預測故障將對系統造成的影響。每種故障分類可依據嚴重程度、出現頻率、檢測與修復的難易程度等情況進行劃分。容錯性質表示部分組件會使系統在故障中繼續正常運行。保護系統可設置軟件機制或增加硬件設備,檢測可能產生異常的固件,并采取相應的保護措施,保障系統安全。系統內在固件產生錯誤數據或指令,將導致農業智能電機出現異常行為。因此,FMEA風險檢測需要對PLC控制系統進行評估,判斷失效模式和異常行為,預測對系統產生的影響并制定檢測機制與解決方案。
2.2 邏輯應用測試
通過實際操作檢驗保護系統的邏輯情況,重點測試邏輯文件能否有效控制農業智能電機的行為,并判斷系統是否與設計標準一致。第1項測試是FALLBACK模式測試,電機失去信號后會有4種運行模式,分別是HOLD、ON_OFF、OFF_ON、ON,通過獨立檢測發現電機行為與預期一致,表明系統FALLBACK能有效發揮控制功能。具體測試結果見表1。第2項測試是電壓跌落測試。系統瞬間啟動恢復的時間范圍在0~0.4 s,在電機突然掉電并持續運行時,如果電壓可以在設定時間內恢復正常,那么電機能夠立刻啟動運行。具體延時恢復啟動的時間范圍在0~300 s,重啟時間范圍是0~9 999 s。當農業智能電機在運行中突然掉電并依然保持運行時,若電壓在規定時間范圍內能夠恢復,那么電機會在規定重啟時間后啟動。若電壓沒有在規定時間范圍內恢復,那么系統啟動模式將轉換為手動重啟,人為的啟動電機。第3項測試是遠程測試與本地測試。系統在遠程模式下,若產品接線端口生效且啟動鍵無法發揮作用,那么可以通過停止鍵終止電機運行。在本地模式下,當遠程寄存器難以控制電機時,接線端口與HMI依然可以發揮作用。第四項測試是故障檢測。系統出現問題后,農業智能電機1將直接進入停止運行模式,農業智能電機2作為備用設備繼續執行命令。當用戶發出人為指令“復位”時,電機中的故障信息被消除并恢復系統的原本運行模式,直到下一個出現故障并停機時。
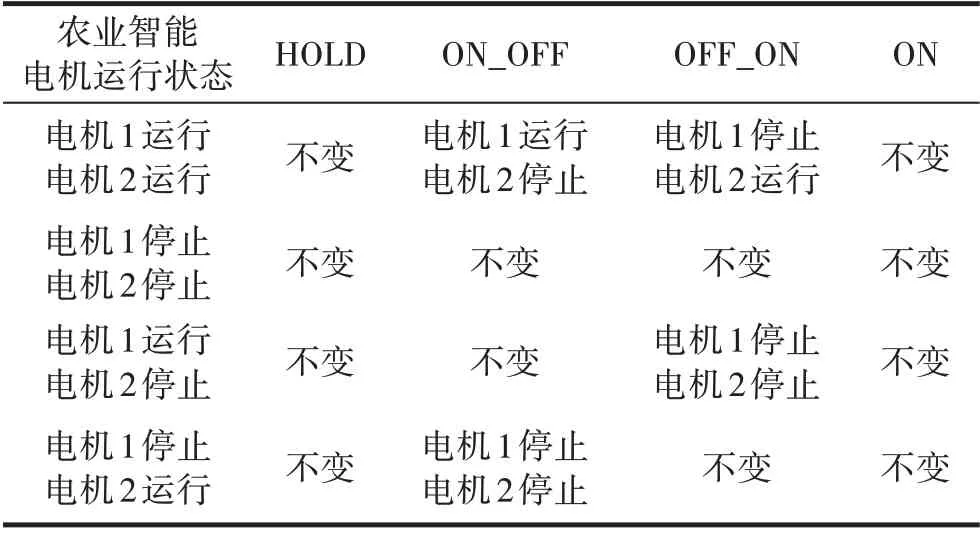
表1 FALLBACK模式測試Tab.1 The FALLBACK mode test
3 結語
針對PLC在農業智能電機保護系統中的設計與應用,本文提出了完整有效的系統設計、檢測用例以及測試結果。根據電機的實際運行需求,文章對PLC在農業智能電機保護系統中的總體結構、模塊、軟件及功能進行設計,在此基礎上提出可執行具有可行性的設計方案。此外,對系統進行FMEA風險檢測和邏輯應用測試,測試結果顯示試驗能夠為PLC在農業智能電機保護系統中的可靠運行提供科學依據,確保系統穩定工作且在農業智能電機實際運行中可以做到靈活可變。
猜你喜歡
今日農業(2022年1期)2022-11-16 21:20:05
今日農業(2022年3期)2022-11-16 13:13:50
今日農業(2022年2期)2022-11-16 12:29:47
今日農業(2021年14期)2021-11-25 23:57:29
汽車維修與保養(2019年7期)2020-01-06 03:30:42
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
汽車維護與修理(2016年10期)2016-07-10 08:17:41
