不同路況下復合型機器人設計計算及仿真分析
2021-09-25 09:35:20陳邦印王建生李慈心王宏民
機械工程師 2021年9期
關鍵詞:分析
陳邦印,王建生,李慈心,王宏民
(五邑大學 智能制造學部,廣東 江門 529020)
0 引言
復合型機器人是一種集移動機器人和通用工業機器人兩項功能于一體的新型機器人。它主要用在企業生產車間,實現搬運、上下料等基本功能和不同工裝、夾具的快速切換及實現物料的智能分揀,能夠為人們省出很多時間和精力,還有利于解決目前企業出現的招工難及招工成本上漲的問題[1-3]。
1 復合型機器人總體設計
本文設計的復合型機器人機械結構由機械臂、行走機構、車架、懸架系統構成,如圖1所示。行走機構是由2個直徑為200 mm驅動輪和4個直徑為100 mm的萬向輪組成的6輪結構模式進行對稱安裝。考慮負載和減輕移動平臺質量,整體平臺尺寸為1200 mm×800 mm×600 mm,車體設計采用的是框架結構,骨架采用的是鋁合金拼接而成,底盤承接板采用的是厚度為15 mm的鋼板,這樣有利于保證驅動輪和萬向輪的裝配精度,確保復合型機器人的運行過程中不出現變形或者側翻。采用差速驅動的6輪式底盤,但這種多輪結構設計存在不共面的現象,為了解決這一問題,通過對車輛中不同的懸掛系統進行分析,得出解決復合型機器人不共面問題。設計一款類似麥佛遜的簡式獨立懸架系統。該懸架系統是在螺旋彈簧力套個減震筒來組成的,其總體結構簡單,占用空間小,滿足機器人簡潔設計理念。懸掛系統的彈簧彈性系數又決定了其對地面適應能力的大小,因此根據小車質量等信息,選用C級碳素彈簧鋼絲,線徑為6 mm,外徑為54 mm,長度為100 mm,有用圈數為5圈。通過計算確定了彈簧剛度系數為2.344×104N/m。
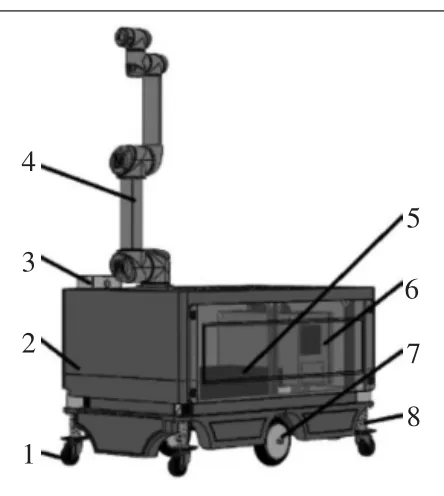
圖1 復合型機器人
2 不同路況下的分析
2.1 越障分析
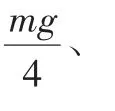
圖2 越障分析
對于萬向輪來說,臺階直角A0點處不發生滑動是越障的條件,此時可知驅動輪給萬向輪提供的轉動力矩為
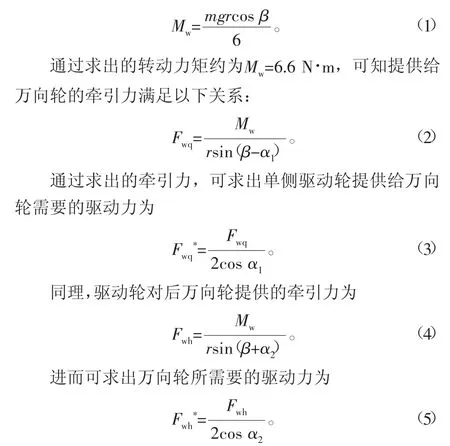
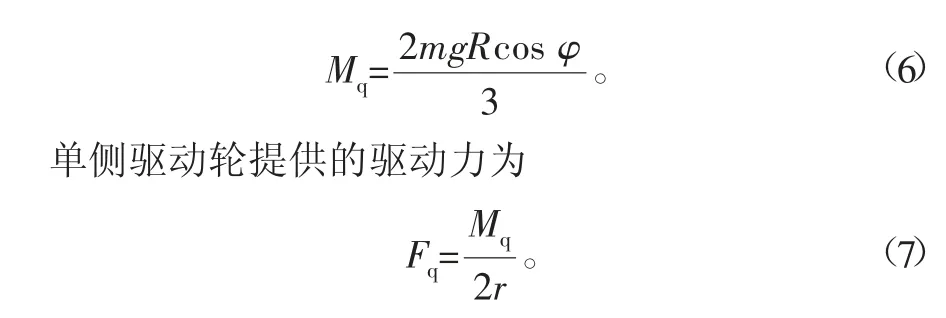
對于驅動輪來說,當遇到障礙物時,具備跨過的條件是在臺階直角A0點處不發生滑動,則驅動輪需要提供的驅動力矩為
2.2 爬坡運動分析
爬坡能力是作為移動機器人一項重要的評價指標,本研究想要達到爬10%的坡度。假設不計空氣阻力和加速阻力的作用下,機器人以最大的速度進行勻速爬行,則受力分析如圖3所示。
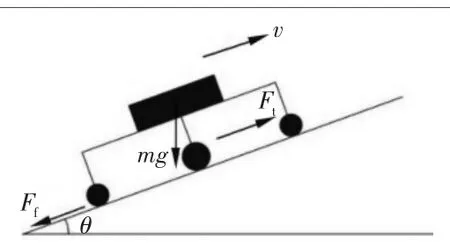
圖3 受力分析圖
爬坡過程中,移動平臺受到來自空氣的阻力、輪子與地面接觸造成的滾動摩擦力、坡度產生的阻力及加速阻力。

式中:Ft為驅動力;Ff為滾動摩擦力;Fi為坡度阻力;Fw為空氣阻力;Fa為加速阻力。
由于采用的6輪結構的小車,萬向輪材料是聚氨酯,驅動輪材料是橡膠,安全系數b為2,則滾動摩擦力Ff計算公式為
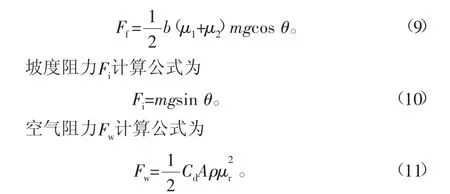
式中:Cd為空氣阻力系數;A為小車在行駛方向投影面積;ρ為空氣密度;μr為車身與空氣的相對運動速度。由于復合型機器人行駛速度較慢,因此不計空氣阻力,則Fw=0。
加速阻力計算公式為

由于以最大的速度勻速爬坡,因此不計加速阻力的作用,則Fa=0。
聯立式(1)~式(6),可得轉矩與坡度間的關系:

2.3 轉彎分析
本文研究的機器人采用的是中間驅動輪前后萬向輪的差速轉向的驅動方式。機器人底盤的轉彎受力分析如圖4所示。在進行受力分析前,對轉向工況進行了簡化處理,使機器人底盤上的一個驅動輪為恒速,另一個為減速運行在平坦地面上;4個萬向輪在轉彎過程中相對中心的姿態相同;對轉彎過程中造成的離心力影響進行忽略。
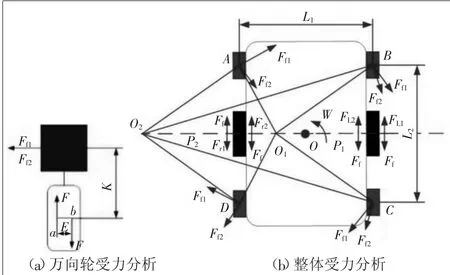
圖4 機器人底盤轉彎受力分析圖
已知在平坦路面上,中間的每個驅動輪與前后每個萬向輪所承載荷分析如下:
對于驅動輪分析,在進行轉彎的過程中,驅動輪做的是純滾動,則在該過程只受滾動摩擦力和垂直輪面的靜摩擦力,因此可根據每個驅動輪所受的重力求出其滾動摩擦力為

對于萬向輪分析,在進行轉彎的過程,做的是純滑動,如圖4(a)所示,設萬向輪左右對稱的a、b兩個點與地面均勻接觸,ab長度是萬向輪寬度的一半。則萬向輪ab兩點處所受的滑動摩擦力為

根據萬向輪受力分析,可求萬向輪與地面接觸中心點的力矩平衡:

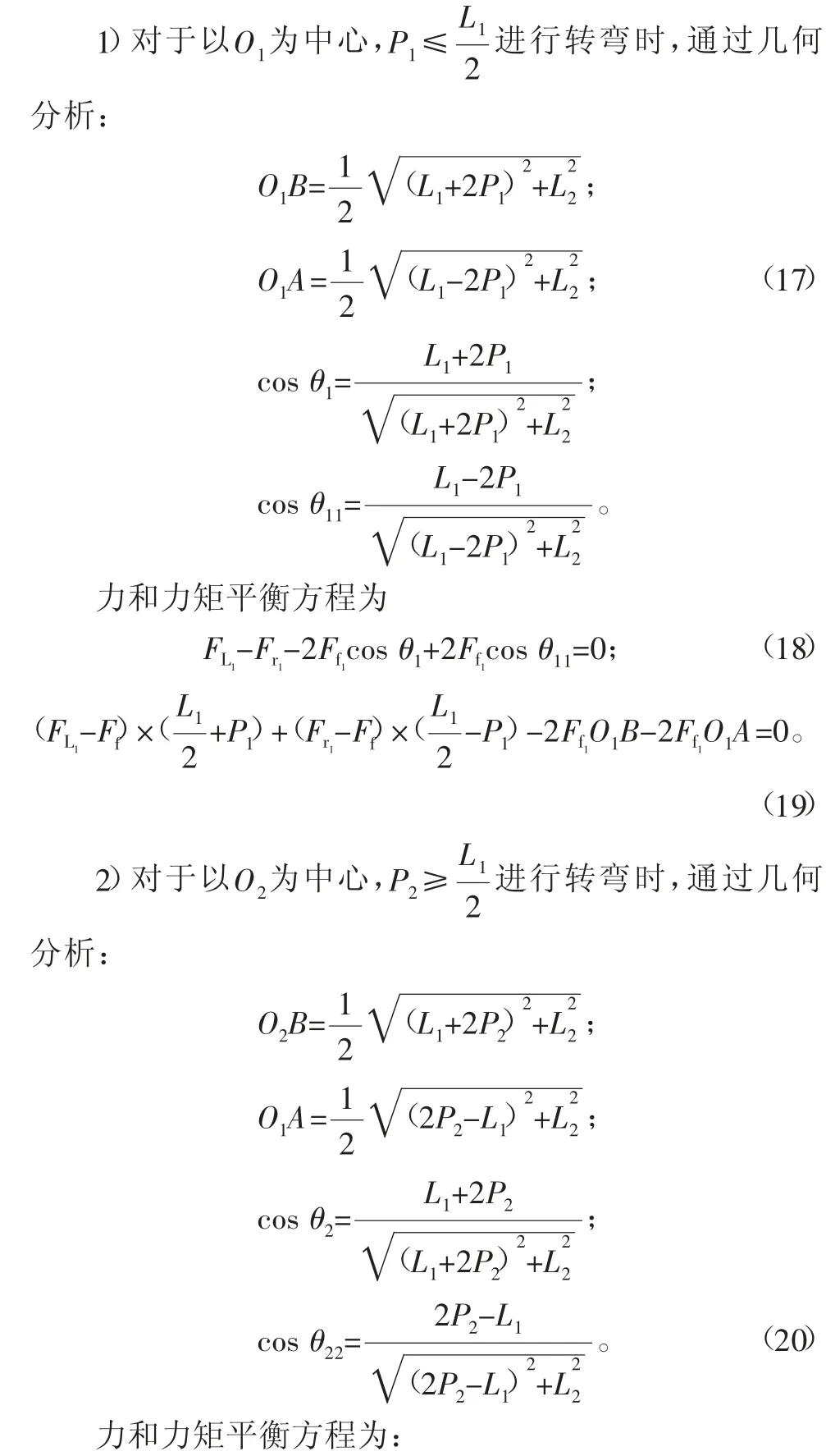
如圖4(b)所示,為機器人底盤的轉彎受力分析,圖中FL1、FL2為左驅動力,Fr1、Fr2為右驅動力,則可以對機器人底盤進行幾何分析,列出力和力矩平衡方程:
3 基于ADAMS的運動仿真及分析
3.1 復合型機器人模型建立
通過三維建模軟件SolidWorks建好復合型機器人簡化模型后,另存為x_t格式的Parasolid文件,將另存為x_t格式文件導入ADAMS,但導入到ADAMS里的模型文件裝配關系已經失效,需要先對各零部件之間的裝配關系進行重新定義,定義完后需要進行工作環境設置,主要的設置為單位、重力和工作棚格等。由于復合型機器人整體尺寸較大,則尺寸單位設置為Milimeter;工作棚格設置為X=750、Y=500;設置復合型機器人重力方向為實際工作時的重力方向。接著添加零件特性、約束和運動副、彈簧力與接觸力及驅動。最后設置好的復合型機器人模型如圖5所示。

圖5 虛擬樣機模型
3.2 路面模型建立
對于凹凸坑,查閱相關資料,發現國家標準GB/T 20721-2006(自動引車通用技術條件)對路面環境有具體要求;路面高度最大值為10 mm。為了綜合分析驗證設計是否合理,在SolidWorks建立12000 mm×2000 mm×100 mm的方形板,并在表面建立一系列凹凸障礙物,凹凸障礙物深度為h、H,以每1.5 mm為標準變化,最后凹凸坑為22.5 mm,且每個障礙物之間的距離為1100 mm,如圖6(a)、圖6(b)所示;對于爬坡,模型設計以每3°進行疊加,且每個坡度之間的距離為4000 mm,最高坡度達到90°。對于轉向路面,模型設計為一個水平面。
將這些路面分別導入ADAMS中,接著調整好路面與復合型機器人的位置關系,使驅動輪剛好與路面接觸或者有一點小縫隙。然后進行路面和輪子之間添加關系、添加靜摩擦力與滾動摩擦力。復合型機器人通過不同路面如圖6所示。
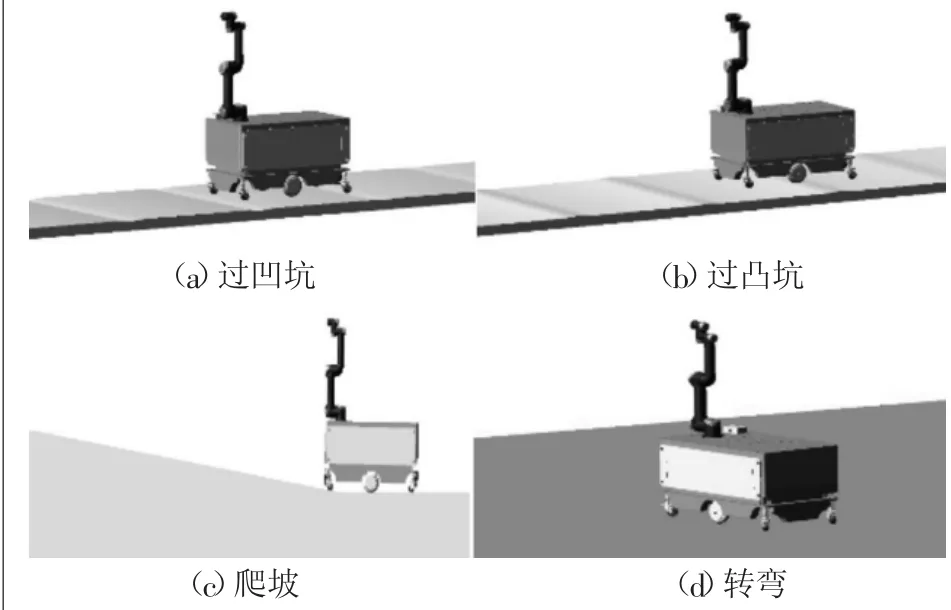
圖6 不同路況模型
3.3 仿真結果及分析
3.3.1 平地條件下的仿真結果
如圖7所示,顯示了復合型機器人在平面地形上行駛的6個輪和地面的接觸力,以及小車質心加速度的變化,仿真開始的較短時間內,由于小車車輪沒有完全與地面接觸產生接觸力,重力的作用造成向下的運動趨勢,使小車與地面壓實變形,所以看到了一個突變的接觸力,當時間到了0.13 s左右,小車已經基本處于平衡狀態了,最后兩個驅動輪和地面接觸力基本保持在421 N左右,4個從動輪與地面接觸力基本保持在100 N左右。對于小車質心加速度在豎直方向上的變化,由于在0.13 s之前受到向下的重力趨勢,導致質心加速度有個突變,之后由于減震系統和車輪阻尼的作用,0.13 s后出現了穩定收斂,接著行駛過程中質心加速度在豎直方向上一直處在0左右小幅度的徘徊。通過以上可以說明復合型機器人在平面地形行駛具有較好的穩定性。
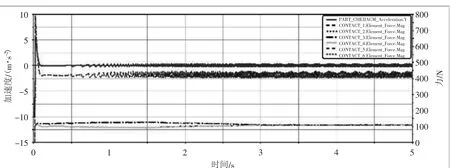
圖7 在平面地形上的接觸力和加速度
3.3.2 凹凸坑下的仿真結果
1)凹坑下的仿真結果。本文設定恒速為1 m/s進行爬坡,仿真時間為25 s、仿真步長為2000步。如圖8所示為復合型機器人依次通過凹坑時質心速度變化,以及驅動輪在豎直方向上的接觸力變化曲線和豎直方向位移變化曲線。
分析圖8(a)可以看出,在0.13 s之前由于受到向下的重力趨勢,導致質心速度有個突變,然后在3 s內加速到1 m/s,并保持勻速運動,此后隨著凹坑的變深速度波動也變大。分析圖8(b)可知,驅動輪越過前9個障礙物時(L≤13.5 mm),驅動輪和地面時刻有接觸,因此保證了行駛的穩定性,但驅動輪越過第10個障礙物,驅動輪出現零接觸力狀態,因此造成較大的波動,當路過第12個凹坑后(L≥18 mm),整體質心已經突變了,這時候復合型機器人前后晃動比較厲害了。仿真結果表明,理論設計的復合型機器人結構能夠穩定地跨過13.5 mm的凹坑,達到設計要求。

圖8 凹坑仿真結果
2)凸坑下的仿真結果。本文設定恒速為1 m/s進行爬坡,仿真時間為25 s、仿真步長為2000步。圖9所示為復合型機器人從底到高依次路過凸坑時,整車的行駛速度變化,以及從動輪和驅動輪在豎直方向的位移,通過圖9(a)可以看出,在0.13 s之前由于受到向下的重力趨勢,導致質心速度有個突變,然后在3 s內加速到1 m/s,并保持勻速運動,經過障礙物時有微波動狀態,但是整體速度還是很平穩。從圖9(b)可以看出,驅動輪越過前11個凸坑障礙物時(H≤16.5 mm)時,從動輪和驅動輪在豎直方向的位移是交錯的,且在過坑時從動輪豎直方向上的位移都小于對應凸坑高度,因此從動輪和驅動輪總能接觸到地面,保證了行駛過程的穩定性。當越過 障礙物高于16.5 mm時,發現從動輪豎直方向上位移的變化已經超過障礙物高度了,出現了離地狀態,因此這時候行駛穩定性較差,出現了顛簸現象。
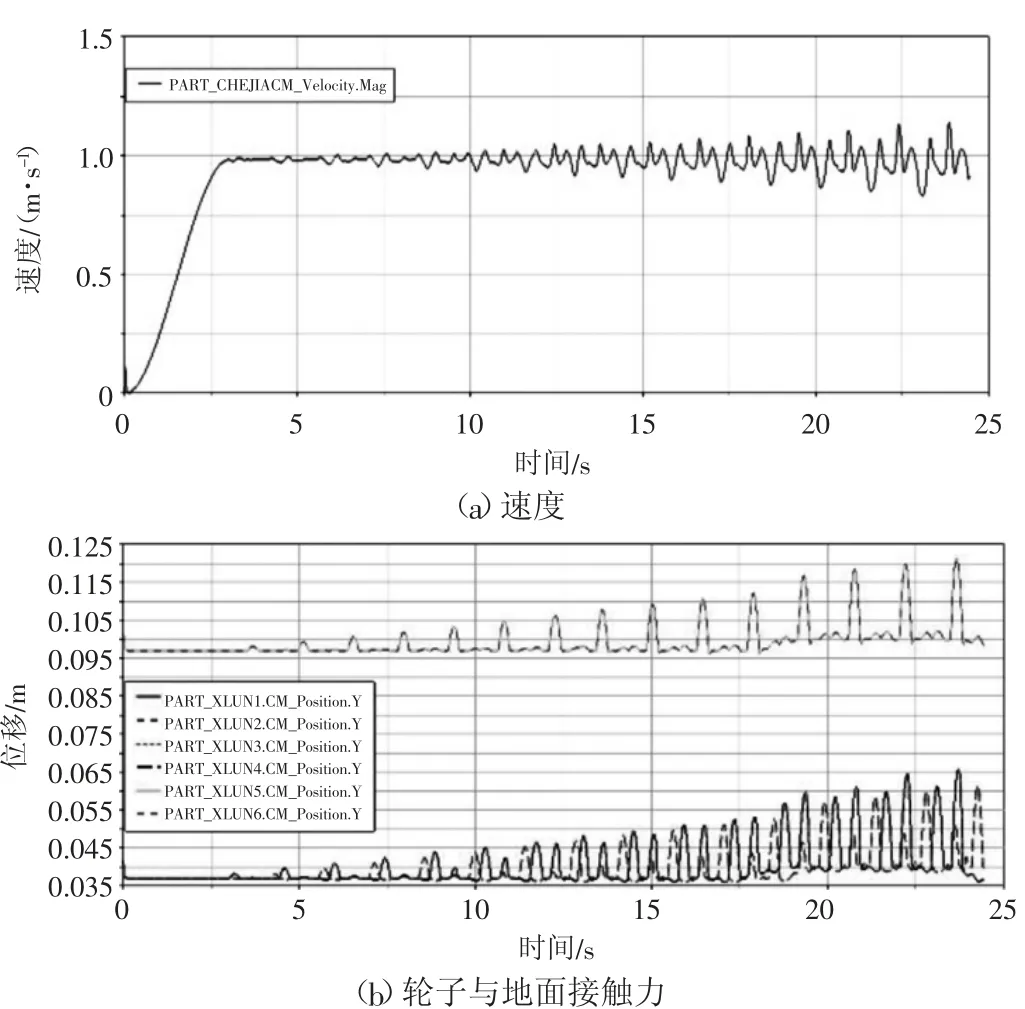
圖9 凸坑仿真結果
3.3.3 爬坡的仿真結果
本文設定恒速為1 m/s進行爬坡,仿真時間為35 s、仿真步長為2000步。如圖10所示為復合型機器人爬坡過程中質心的位移、速度、加速度及6個輪子與地面的接觸力曲線圖。從圖10(a)可以看出,在3 s內速度加速到1 m/s,在5.0~10.3 s和13.2~19.6 s時間段復合型機器人處于爬坡狀態。在前從動輪開始進坡時,中間驅動輪由于慣性作用出現短暫懸空現象,因此速度出現下降,驅動輪恢復與地面接觸后,速度和加速度出現上升,最后回到平穩狀態。當剛好爬上坡時,前從動輪脫離地面,中間驅動輪和后從動輪承擔總體重力,因此出現了速度和加速度的上升,當脫離地面的前從動輪與地面接觸后,速度和加速度出現了下降,最后回到平穩狀態。而22.1~27.9 s時間段為開始爬第三個坡度,由于坡度大出現嚴重打滑和后溜現象,最終小車在第二坡度上原地打滑。圖10(b)為輪子與地面的接觸力曲線圖,在前從動輪開始進坡時,中間驅動輪由于慣性作用出現短暫離開地面現象,因此驅動輪出現了下降到零接觸力狀態,從動輪上的接觸力達到最大值。當剛好爬上坡時,前從動輪脫離地面,此時前從動輪接觸力出現零接觸力狀態,中間驅動輪接觸力達到最大值。當爬上第三個坡度時,由于坡度過高,出現打滑現象,各個輪子與地面接觸力出現波動,最后趨于平衡狀態。綜上所述,復合型機器人最高能爬第二個坡,通過坡度計算公式為
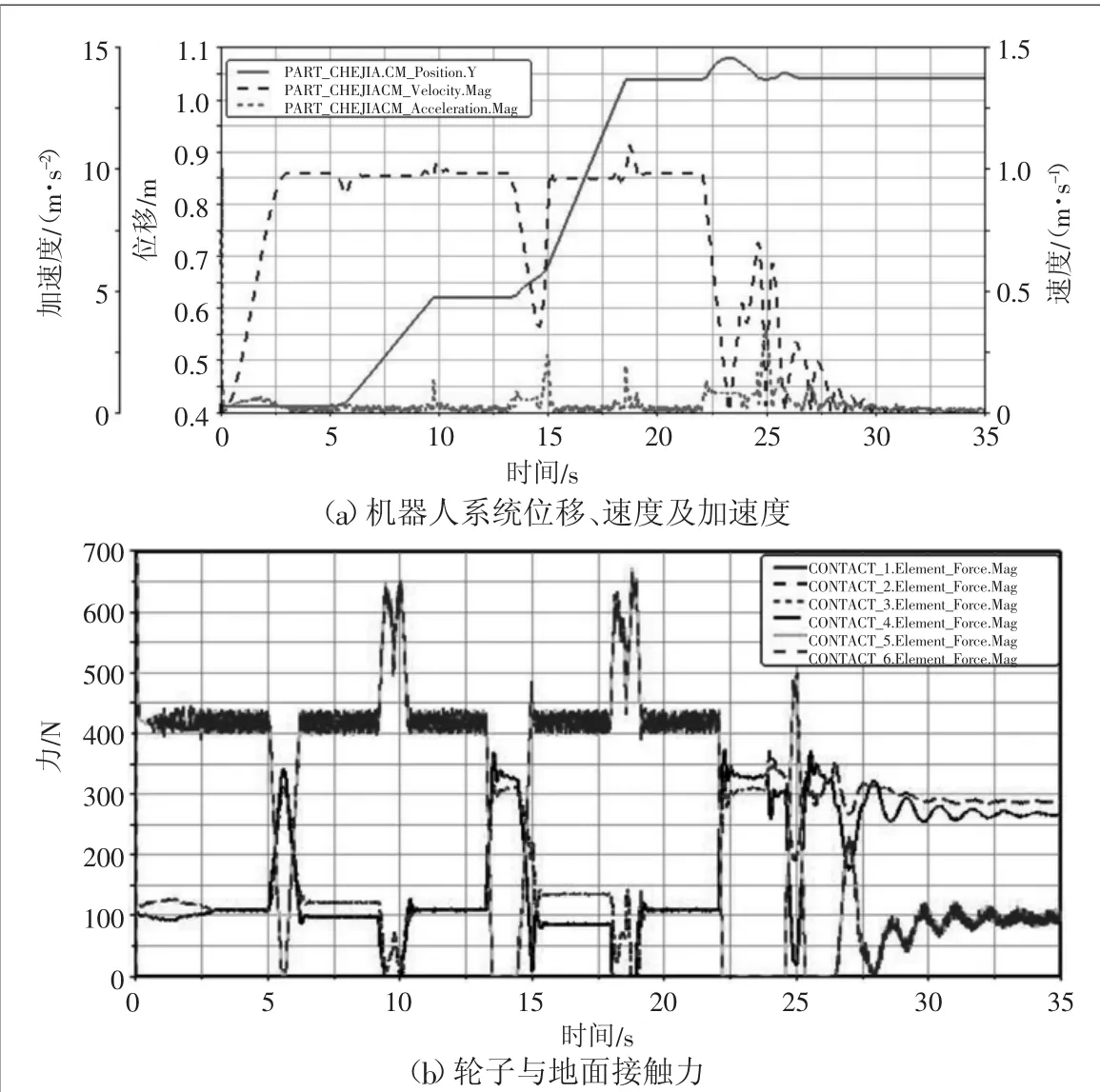
圖10 爬坡仿真結果

式中:I為坡度;H為高程差,第二個坡高程差為418 mm;L為水平距離,第二個坡水平距離為3978 mm。
代入求出坡度I為10%,符合要求。
3.3.4 轉向的仿真結果
復合型機器人轉向是依據左右兩個中間驅動輪不同轉速而實現的,本文設定一側恒速為1 m/s,另一側減速進行仿真,仿真結束時間為40 s、仿真步長為2000步。仿真得出速度隨時間變化曲線如圖11所示。3 s內速度從0加速1 m/s,3 s后,右輪速度保持不變,左輪速度逐漸下降到零。仿真得出的驅動力矩和在X、Z方向的位移如圖11所示,在前3 s,由于存在加速狀態,驅動力矩會達到最高4.95 N·m,接著就顯一定規律波動。當行駛半徑逐漸減到左右兩輪距離的一半,穩定性會有點波動。通過圖11(c)的轉彎半徑與驅動力矩曲線更能清楚看到,在轉彎半徑很小時,驅動力矩波動比較大,有點不穩定,半徑在5 m以上呈現一定規律。圖11(c)為提取圖11(b)曲線數據導入Matlab進行數據濾波處理并繪制出來的。
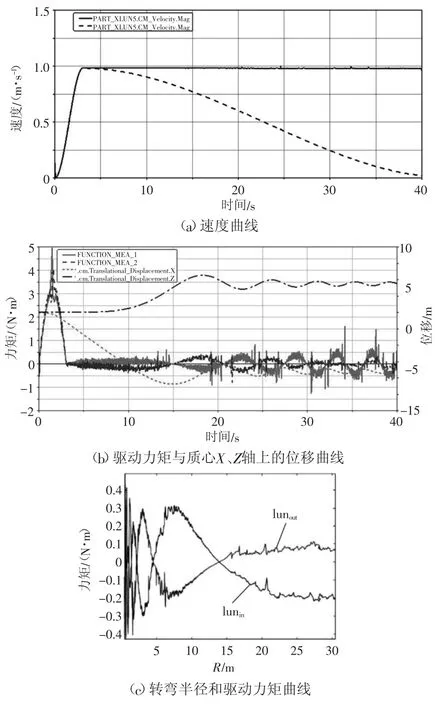
圖11 轉彎仿真結果
4 結語
對于在不同工況下復合型機器人的穩定性分析,運 用三維軟件SolidWorks進行模型建立和ADAMS軟件進行動力學仿真。仿真結果表明,在彈簧剛度系數為2.344×104N/m的減震裝置下,復合型機器人在一定工況下,能夠保證足夠驅動力,質心波動平穩和速度穩定,從而認證設計的復合型機器人結果的合理性。
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
