Android智能手機雙頻GNSS偽距差分動態定位性能分析
2021-09-28 06:37:32王穎喆陶賢露劉萬科
導航定位與授時 2021年5期
王穎喆,胡 捷,陶賢露,劉萬科,朱 鋒
(武漢大學測繪學院,武漢 430079)
0 引言
智能手機具有普遍性、易攜帶性和低成本等優良特性,使得基于其所衍生出來的位置服務移動應用深受大眾的歡迎。精準的時空信息是位置服務的基礎,在城市復雜環境下,利用手機獲取穩定的米級甚至亞米級高精度位置信息仍是目前亟需解決的問題。Google公司于2016年開放了Android 7.0及以上版本的操作系統中原始全球導航衛星系統(Global Navigation Satellite System,GNSS)觀測值的獲取接口,包括偽距、載波相位、多普勒和信噪比等[1],使得開發者基于GNSS觀測值對手機的導航定位算法做更深層次的優化成為可能。此外,智能手機GNSS天線和芯片從單頻單模向多頻多模方向快速發展,例如小米公司于2018年發布了全球首款雙頻GPS定位手機Mi8,內置BCM47755雙頻GNSS芯片;華為公司于2020年發布了支持北斗三頻信號的HUAWEI P40手機,內置海思Hi-1105自研GNSS芯片。GNSS原始觀測值的開放和硬件模塊性能的提升,極大促進了低成本終端與高精度定位算法的有機結合,這給基于手機等大眾智能終端的GNSS精密導航定位研究帶來了機遇與挑戰[2]。
目前,國內外學者針對手機GNSS觀測值特性和定位性能開展了一系列研究工作。在數據質量分析方面,由于普遍采用體積小的線性極化天線和低功耗的GNSS芯片,使得智能手機GNSS觀測值的特性受到顯著影響,具體表現為信號強度低、偽距多路徑誤差大、半周及整周周跳頻繁、模糊度不具有整數特性等[3-6],從而給手機精密定位研究帶來挑戰。在基于GNSS觀測值的定位性能方面,吳瓊等分析了Mi8雙頻無電離層組合精密單點定位性能,在開闊環境下的靜態定位精度可達米級甚至分米級,但收斂時間較長,難以滿足行人實時獲取位置的需求[7-8];劉萬科等提出了一種通過相位歷元差分約束載體歷元間位置變化的單機濾波算法,有效平滑了Mi8偽距觀測噪聲,在開闊和較遮擋環境下平面精度可達1.5~2m[9-10];R.Eugenio等對Google Nexus 9平板和三星S8+等多款手機相位差分定位性能進行了測試,在開闊環境下通過快速靜態的方式獲得了分米級甚至厘米級精度的浮點解[11-12];耿江輝等將Google Nexus 9平板外接測量型天線,并校準其初始相位偏差,得到了厘米級精度的固定解[13]。
由以上研究現狀可知,目前國內外學者針對手機GNSS定位算法和性能的研究多集中在理想環境和靜止狀態下,而在城市復雜環境中對行人和車載這兩種常見應用場景的動態定位性能評估較少;其次,在實際動態環境下,GNSS相位觀測值連續性差、周跳頻繁,導致基于載波相位的定位算法存在模糊度收斂慢、難以固定的問題。因此,本文利用Mi8手機的雙頻相位歷元差分觀測值和多普勒觀測值獲得了高精度的位置變化信息,避免了對模糊度的估計,聯合雙頻偽距觀測值構建了濾波定位模型,并引入偽距差分數據,以提升手機定位的連續性和精度。在武漢市開展了較復雜場景下的行人和車載測試,驗證了雙頻信號和偽距差分改正數對手機定位性能的提升效果。
1 偽距差分定位算法
1.1 偽距差分定位模型
GNSS偽距差分定位的觀測方程如式(1)所示
(1)
δRTD=δtrop+δion+δeph+δisc
(2)

當不存在差分信息時,流動站的對流層延遲和電離層延遲分別使用Saastamoinen和 Klobuchar模型改正,L1/E1/B1I/R1/E5a信號在衛星端的硬件延遲誤差可以使用廣播星歷提供的群延遲參數加以改正,而對L5信號的硬件延遲誤差δisc,L5,則需要單獨使用民用導航電文(Civil Navigation, CNAV)星歷提供的L5信號時延參數ISCL5加以改正,如式(3)所示[14]
δisc,L5=TGD-ISCL5
(3)
其中,TGD為廣播星歷播發的群延遲參數。
多頻多系統GNSS偽距差分定位函數模型如式(4)所示
(4)
其中,G代表全球定位系統(Global Positioning System, GPS),E代表歐洲伽利略衛星系統(GALILEO),J代表日本準天頂衛星系統(Quasi-Zenith Satellite System, QZSS),C代表中國北斗衛星導航系統(BeiDou Navigation Satellite System, BDS),R代表俄羅斯衛星系統GLONASS,i為衛星編號;P代表改正衛星鐘差后的偽距觀測值;ρ代表衛地距;δRTD為偽距差分改正數;mx、my、mz代表各衛星的線性化參數;(dxdydz)代表手機位置參數;dtG1、dtG5、dtE1、dtE5、dtJ1、dtJ5、dtC1、dtR1分別表示GPS L1、GPS L5、GALILEO E1、GALILEO E5a、QZSS L1、QZSS L5、BDS B1I和GLONASS R1頻點的接收機鐘差;ε為偽距觀測噪聲,手機的偽距觀測噪聲與載噪比相關性較強[5-6],因此采用載噪比定權模型[7-9]。
1.2 濾波定位模型
在本文的偽距差分卡爾曼濾波導航模型中,待估狀態包含載體三維坐標(xyz)以及接收機鐘差δtR,狀態向量可表示為
(5)
狀態更新方程如下
Xk=Φk,k-1·Xk-1+Bk-1·uk-1+Wk-1
(6)
其中,Φk,k-1為第k-1歷元到第k歷元的狀態轉移矩陣,本模型中為單位陣;Bk-1為輸入系數矩陣,分別表示為
Φk,k-1=I4×4
(7)
Bk-1=I4×4·Δt
(8)
uk-1為系統方程的控制輸入,本算法中為相位歷元差分測速或多普勒測速計算出的歷元間位置變化量(dxdydz)和接收機鐘速velclk,表示為
uk-1=[dxdydzvelclk]T
(9)
Wk-1為系統噪聲向量,其協方差的設置取決于歷元間狀態變化量的計算精度。
雙頻偽距差分濾波算法流程如圖1所示。首先,對手機GNSS原始觀測值進行粗差剔除和周跳探測等驗前質量控制;其次,通過多普勒測速(Standard Point Velocity, SPV)和相位歷元差分(Time-Differenced Carrier Phase,TDCP)測速得到狀態變化量,完成狀態更新;最后,利用手機偽距觀測值與基站提供的偽距差分改正數完成量測更新,從而得到濾波結果。在城市復雜環境下,手機GNSS信號易發生中斷且周跳頻繁,使得模糊度參數難以準確估計,這給基于載波相位的GNSS定位算法帶來了嚴峻的考驗。因此,本文使用歷元間載波相位差分觀測值,以避免對模糊度參數的估計,且與時空相關的誤差如大氣誤差等在歷元差分時得以有效削弱,其殘余誤差可忽略不計[15]。當存在4個及以上連續跟蹤的載波相位觀測值時,即可估計出高精度的載體狀態變化量,即位置變化量和接收機鐘速;當處于惡劣環境時,由于難以探測出所有周跳或連續跟蹤的載波相位觀測值數少于4,因此TDCP失效,此時選擇多普勒測速方法可以得到較穩定的狀態變化量。通過狀態變化量對絕對位置的約束可以有效平滑偽距定位的噪聲,從而提高位置結果的連續性。
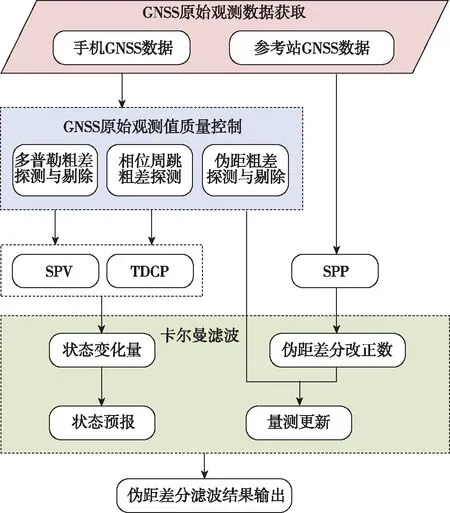
圖1 偽距差分濾波算法流程圖
2 偽距差分定位性能
2.1 數據說明
本文實驗所用設備為雙頻手機Mi8,支持GPS L1+L5、GLONASS R1、GALILEO E1+E5a、BDS B1I和QZSS L1+L5五系統雙頻的GNSS原始觀測值輸出。采用課題組研制的大眾行人手機導航軟件Walker,分析了2組具有代表性的實測數據,分別為較復雜場景下的行人和車載動態數據,旨在對比分析單頻定位和雙頻定位、單點定位和偽距差分定位在多場景、多模式下的定位性能。具體數據信息如表1所示,解算策略如表2所示,各算例均采用1.2節給出的濾波定位算法處理。

表1 數據基本信息
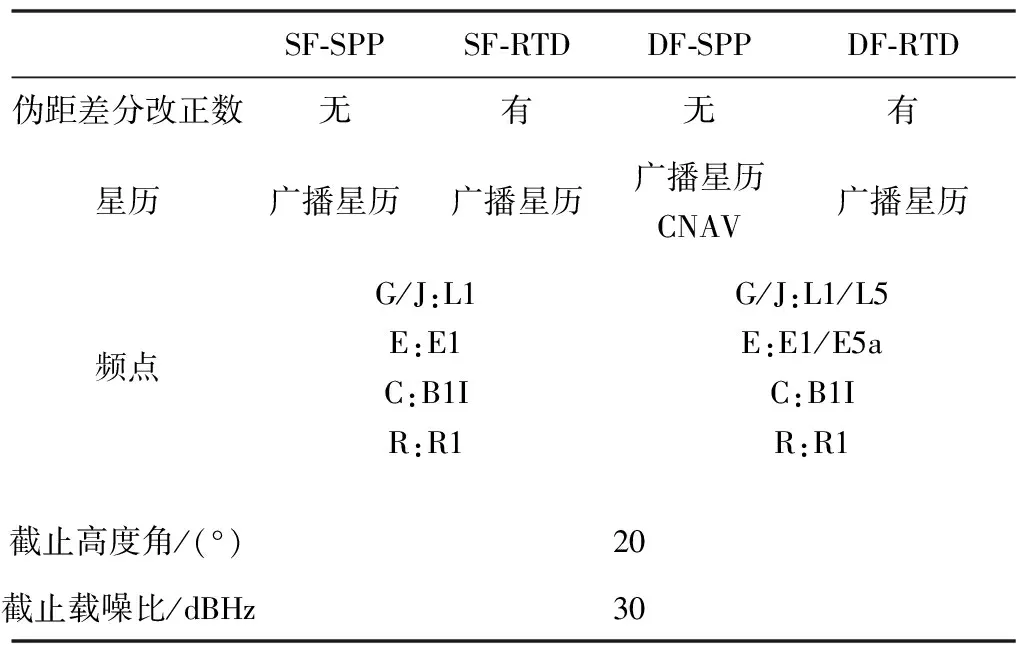
表2 解算策略
其中,SF-SPP為單頻單點定位,SF-RTD為單頻偽距差分定位,DF-SPP為雙頻單點定位,DF-RTD為雙頻偽距差分定位。
2.2 行人動態算例定位分析
行人動態實驗的設備和環境分別如圖2和圖3所示,操場外側有樹蔭遮擋,參考軌跡由NovAtel組合導航定位系統SPAN提供。衛星數和PDOP值序列如圖4所示,經粗差探測與剔除后,能夠參與定位解算的有效衛星總數大部分歷元在20顆左右,其中L5/E5a頻段的衛星數在7顆左右。圖5和圖6分別給出了單頻、雙頻定位誤差序列,可以發現:雙頻解算結果相比于單頻解算更連續、平滑,粗差點明顯減少,體現了L5/E5a信號偽距精度高、抗多路徑能力強的定位優勢;偽距差分定位由于削弱了大氣延遲誤差殘余、星歷誤差和硬件延遲等系統誤差,因此在定位結果上改正了單點定位在各方向上約0.5m的系統偏差,使得誤差序列整體更接近于零,但由于無法削弱與測站環境相關的多路徑等誤差,因此偽距差分定位結果的誤差序列與單點定位的波動幅度一致。表3給出了平面和高程方向的定位誤差RMS統計值,對比單雙頻定位結果可知,DF-SPP的3D精度相比于SF-SPP提升了26%,DF-RTD相比于SF-RTD提升了18%;對比單點定位和偽距差分定位結果可知,SF-RTD相比于SF-SPP提升了21%,DF-RTD相比于DF-SPP提升了13%。單頻單點定位的平面精度為1.43m,在加入L5/E5a信號和偽距差分改正數后,平面精度提升至0.65m。
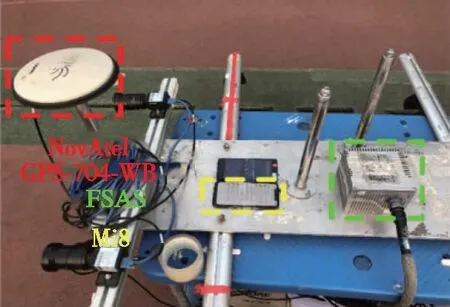
圖2 行人實驗設備安裝示意圖
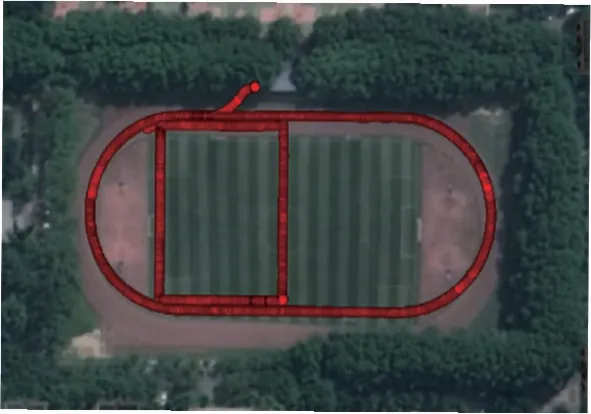
圖3 行人實驗路線
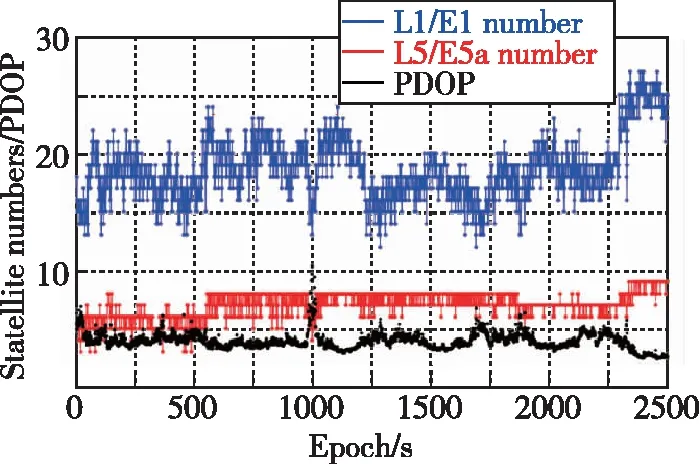
圖4 行人算例的有效衛星數和PDOP序列
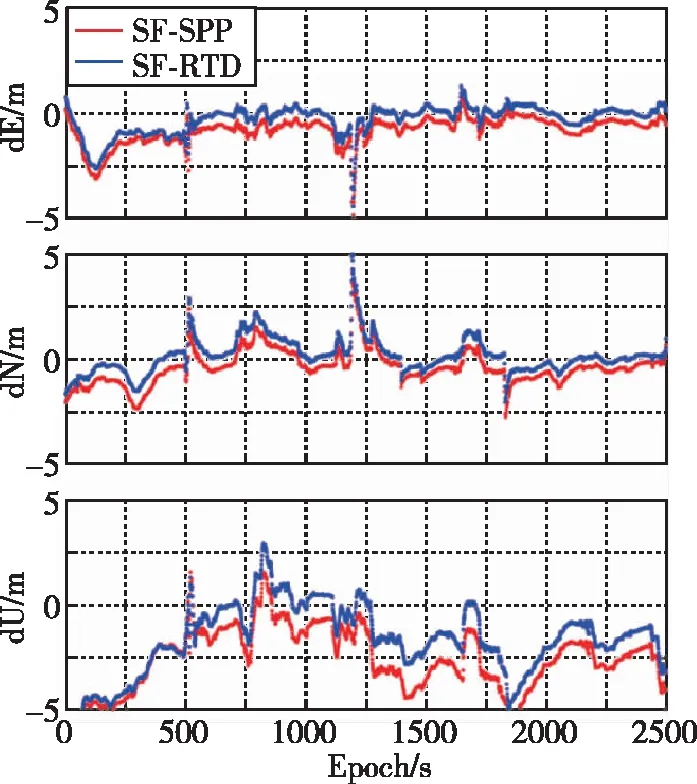
圖5 行人單頻定位誤差序列
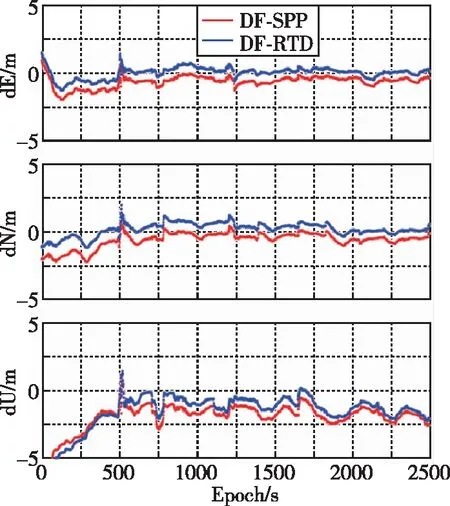
圖6 行人雙頻定位誤差序列

表3 行人動態定位誤差RMS統計
2.3 車載動態算例定位分析
車載動態實驗設備、路線和環境分別如圖7、圖8和圖9所示,其中A、B為途徑高樓、樹蔭等遮擋環境的場景,C、D為城市公路、郊區等一般場景。為模擬大眾用戶使用手機進行車載導航的實際應用場景,將Mi8放置于車內,參考軌跡由NovAtel組合導航定位系統SPAN提供。首先對Mi8在城市環境下的衛星數、PDOP和偽距噪聲進行分析。如圖10所示,0~800s和2400~3600s歷元(黃色框)存在較嚴重的高樓和樹蔭遮擋,衛星數下降5~10顆,PDOP值明顯增大。由圖11和圖12可知,L1頻段偽距噪聲偏大,粗差數較多,而L5頻段由于抗多路徑能力更強,偽距噪聲無明顯增大趨勢,其偽距精度更高。

圖7 車載實驗設備安裝示意圖

圖8 車載實驗路線
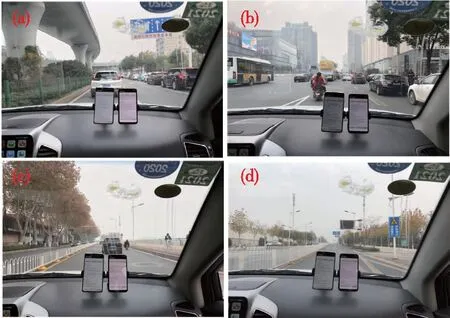
圖9 車載實驗場景
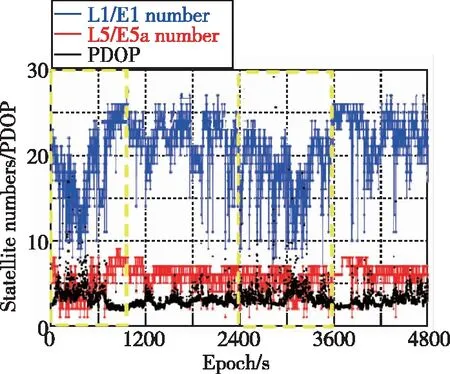
圖10 車載算例的有效衛星數和PDOP序列
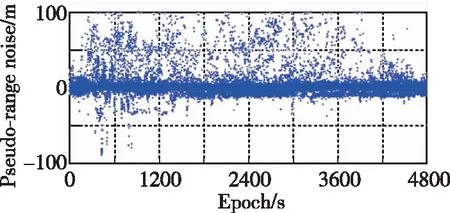
圖11 L1/E1偽距噪聲序列
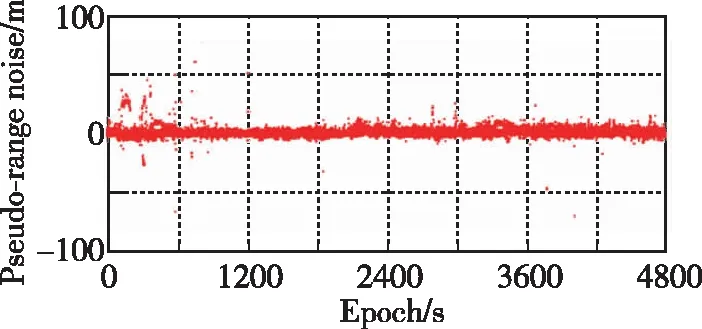
圖12 L5/E5a偽距噪聲序列
圖13和圖14分別給出了單頻、雙頻定位的誤差序列,可以發現,雙頻定位結果的連續性和平滑性更好,誤差序列波動整體更小。而對比單點定位和偽距差分定位可知:當采用單頻解算時,由于偽距差分改正數的量級較小,弱于L1/E1頻段的偽距噪聲,因此對系統偏差的削弱效果不明顯,SF-RTD在E/N/U方向上的誤差序列與SF-SPP基本重合;當使用雙頻解算時,偽距差分改正數進一步提高了L5/E5a頻段的精度,削弱了0.2~0.4m的系統偏量,U方向的改正效果最明顯。
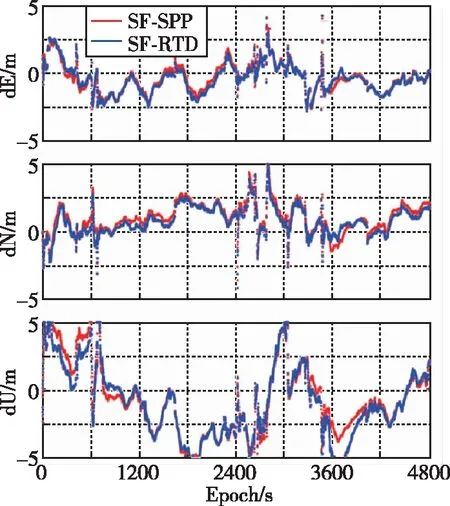
圖13 車載單頻定位誤差序列圖

圖14 車載雙頻定位誤差序列圖
表4給出了遮擋環境和全程車載動態定位誤差RMS統計值。DF-SPP在遮擋和全程路段對SF-SPP分別提升了31%和19%,DF-RTD對SF-RTD分別提升了27%和52%。在環境較遮擋時,更能突出L5/E5a信號偽距精度高、抗多路徑能力強的定位優勢。SF-RTD在遮擋環境下與SF-SPP的3D精度相比提升了14%,在全程路段下提升了3%,DF-RTD對DF-SPP在遮擋和全程路段中分別提升了10%和42%。在環境較遮擋時,偽距差分改正數淹沒在手機的偽距噪聲中,對定位結果中的系統偏差改正作用不大,而在較開闊的環境中更能發揮其作用。針對全程的解算情況來看,車載動態定位平面精度為1.03m,基本可以實現車道級導航定位精度。但是,由于在車載狀態下,觀測環境變化顯著,并且手機放置于車內,其GNSS觀測值質量受到影響,因此車載定位精度整體差于行人定位精度。
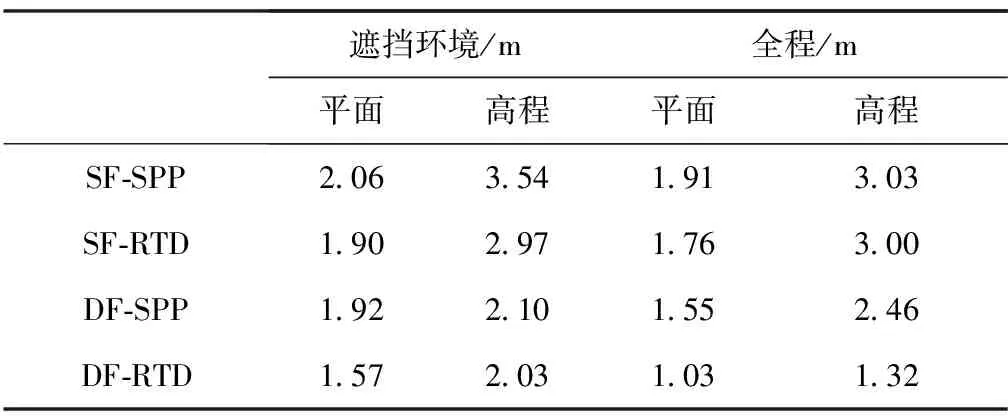
表4 車載動態定位誤差RMS統計
3 結論
由于偽距單點定位算法無法滿足Android智能手機用戶對其所提供的導航定位服務越來越高的需求,且遮擋環境下相位連續性差、周跳頻繁等因素,使得基于載波相位的定位算法穩定性較差。本文聯合歷元間載波相位差分觀測值、多普勒觀測值和偽距觀測值構建了雙頻偽距差分濾波定位模型,行人和車載動態定位平面精度分別達到0.65m和1.03m。同時,對比分析了單頻定位和雙頻定位、單點定位和偽距差分定位的性能,雙頻定位精度與單頻相比提升了15%~30%,有效提高了定位結果的連續性和平滑性;偽距差分定位精度和單點定位相比提升了5%~20%,有效削弱了單點定位結果的系統性偏差。