自動往復播種機的機械機構及電氣系統設計
2021-10-08 03:23:48繆彥
南方農機 2021年18期
繆 彥
(上饒幼兒師范高等專科學校,江西 上饒 334000)
1 機械機構設計
1.1 機械機構組成
系統機械機構設計如圖1所示,核心部分為種床整備裝置,位于整個機構前半部分,用于清除小麥秸稈和根茬,實施播種作業。機械機構運動牽引裝置可與拖拉機連接,由拖拉機提供自動往復播種動力。具體設計機構如下,1為地輪裝置,2為傳動系統,3為擋秸板,其中,地輪裝置和傳動系統可與拖拉機連接。在機構主機架上,安裝有肥箱、種箱、肥料分配器、開溝器等播種作業的輔助部件[1-4]。
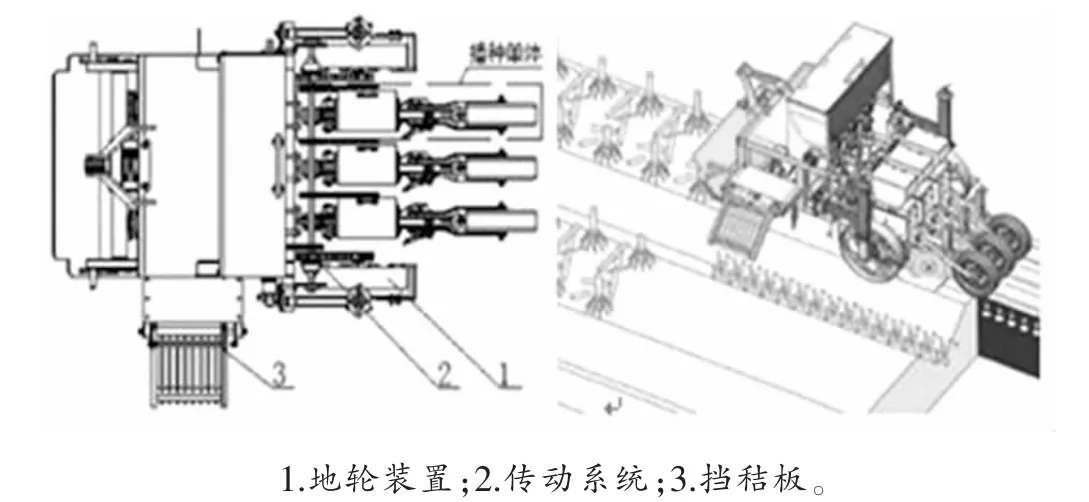
圖1 自動往復播種機機械機構及田間作業模型
1.2 工作原理
機械機構主要為系統執行自動往復播種作業提供必要的力學結構支撐和連接傳動能量。工作原理如下:機械機構與拖拉機進行三點懸掛作業,由拖拉機給系統機械機構提供作業動能,擋秸板用于分揀秸稈和根茬,機械機構底部能夠創造出大于50 cm的播種帶。在地輪裝置的驅動下,機械機構上的開溝器按照電氣系統參數設置進行破土開溝和排肥作業,高速精密排種器將小麥種子排入種溝中,之后在傳動系統帶動下,對完成排種的種溝進行填埋和壓實。上述作業過程中,通過調整開溝器間距、排種器排速、傳動系統運轉速率等參數,能夠調節機械機構排種作業動能、力學性能等物理參量,實現對播種作業的自動化調整。具體來說,本系統設計的播種行距調節范圍為15 cm~25 cm,播種深度調節范圍為2 cm~8 cm。
2 電氣系統設計
2.1 自動往復播種控制單元
以3次自動往復播種作業為例,對應控制示意圖如圖2所示。采用西門子S7-200型PLC[1]為核心構成自動往復播種控制單元。實際工作時,技術人員先設置好播種機的運行速率、播種頻率、開溝深度、播種行距等參數。開始工作后,播種機運行至傳感監測點0位置,PLC向播種機的傳動系統發送指令,控制播種機從傳感檢測點0位置向傳感監測點1直線運行。運行過程中,根據預設參數進行自動排種、開溝、施肥、填土、壓實等作業,完成傳感監測點0~1之間區域的播種作業。到達傳感監測點1后,PLC控制傳動系統轉向,播種機向傳感監測點2運行。到達傳感監測點2后,在PLC指令控制下,播種機向傳感監測點3運行,繼續完成傳感器監測點2~3之間區域的播種作業。之后循環往復完成剩下區域的播種作業。上述控制過程中,PLC可對傳感監測點的位置進行精確定位。
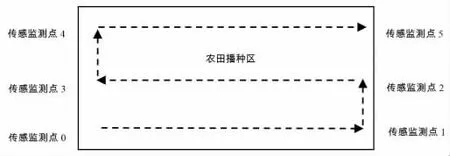
圖2 自動往復播種示意圖
2.2 往復監測傳感器單元
自動往復播種作業關鍵技術過程為:PLC對播種機在農田區域位置進行精確定位,并根據定位反饋值控制播種機傳動系統的速率、方向等參數。為確保上述過程的精準性,需設計往復監測傳感器單元,具體選用Telemecanique公司研發的XCKM102限位開關傳感器[2]。該款傳感器具有便攜且安裝、拆卸方便的特點,適合臨時安裝在農田播種區外圍的各傳感監測點。此外,該傳感器具有精密性好、抗沖擊、抗振動等特性,符合IEC60947-5-1等國際質量標準[3],可對大中型農機設備運動位置進行精準定位。
具體控制過程為:將各限位開關傳感器提前埋設在農田播種區各監測點,并與PLC之間建立起I/O連接關系,各傳感監測點默認為PLC梯形圖程序中的一個常開觸點。當播種機遠離傳感監測點0時,對應的常開觸點輸出0,PLC控制播種機進行播種運動作業。當播種機靠近傳感監測點1,并達到限位開關傳感器閥值時,對應的常開觸點閉合輸出1,PLC控制播種機傳動系統停止當前播種作業,并轉向運動至傳感監測點2位置。當到達傳感監測點2位置后,對應的常開觸點輸出1,PLC控制播種機向傳感監測點3運動并進行播種作業,之后循環往復。
2.3 物理株距監測單元
為實現物理株距合理控制,防止出現過密和過疏等問題,選用JCJM公司研發的U85-210224激光測距傳感器[4],設計物理株距監測單元模塊。該傳感器能夠在0.03 m~10 m范圍內精確測定兩個物體之間的距離,具有測量精度高、響應時間短等優點,且能與PLC連接通信,完成對播種物理株距的采集、傳輸、響應、監測控制[5-6]。具體控制過程為:將U85-210224激光測距傳感器安裝在播種機排種器上,并與PLC的I0.5端口連接。播種機進行排種作業時,傳感器實時檢測相鄰兩個播種坑之間距離,并與預設株距參數比較。若測距反饋值與預設值相同,則播種機繼續執行播種作業;反之系統發出報警提示信號,PLC向傳動系統發出停止指令,播種機停止運行。
3 軟件編譯及試驗結果
3.1 系統軟件程序編譯思路
本系統使用梯形圖程序編寫自動往復播種作業程序,具體編寫思路為:1)啟動系統后進行PLC自檢。2)檢測傳感監測0位置常開觸點是否閉合,若閉合,PLC發出高電平信號驅動播種機的傳動系統,使播種機向傳感監測1位置運行。3)播種機運行過程中,按照預設的參數執行開溝、施肥、排種、填土、壓實、轉向作業,且各傳感器實時檢測并向PLC反饋各作業環節的質量。若出現問題,PLC向報警系統發出高電平指令,同時向傳動系統發出低電平指令,停止播種作業。4)當播種機運動到農田播種區域的最后一個傳感監測N位置時,PLC向傳動系統發出低電平指令,整個系統停機運行。具體程序流程圖如圖3所示。
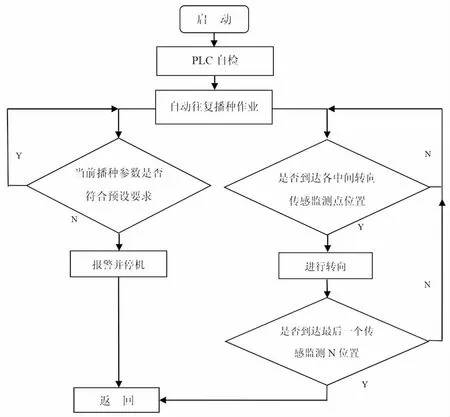
圖3 程序編譯流程圖
3.2 田間播種試驗結果
系統完成設計和組裝后,在寬150 m、長80 m的試驗田實施播種試驗。設定小麥播種往復循環次數5次,物理株距25 cm,收集各行播種株距平均值、往復播種完成情況兩項參數,允許株距誤差為±1 cm,測試結果如表1所示。
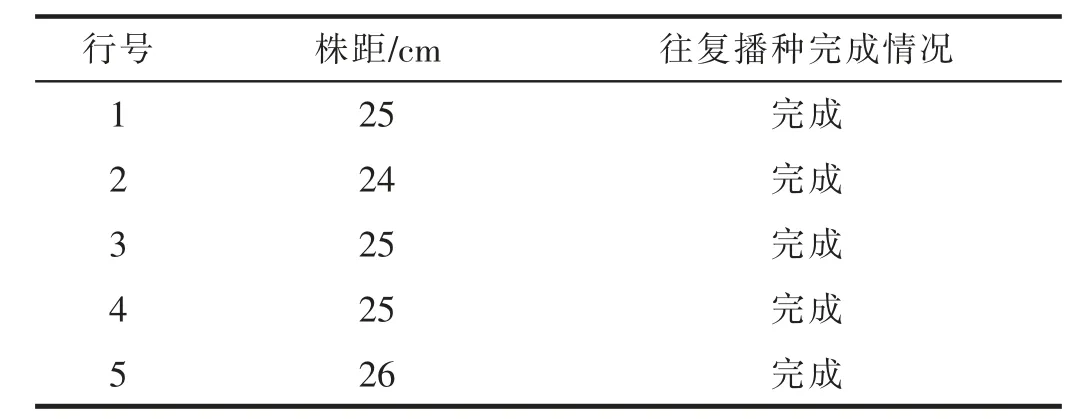
表1 自動往復播種試驗結果
4 結語
田間播種試驗結果發現:設定小麥播種循環次數5次、物理株距25 cm時,實際播種作業循環次數達標,播種物理株距合格率為100%,且無漏播和重播情況,說明所設計系統能夠滿足小麥自動往復播種作業需求。相信隨著農業機械自動化技術的不斷發展,自動往復播種技術在農業生產中的應用案例也將越來越多,對提升農業生產的自動化、智能化、先進性必將產生積極的效應。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
電腦報(2020年35期)2020-09-17 13:25:53
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
故事大王(2016年7期)2016-09-22 17:30:08
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
