MIMU/GPS 緊組合系統(tǒng)在車輛導(dǎo)航中的應(yīng)用
2021-10-11 03:16:06劉新源
關(guān)鍵詞:系統(tǒng)
◎劉新源
(三門峽職業(yè)技術(shù)學(xué)院智能制造學(xué)院,河南三門峽 472000)
車輛方便了人們的出行,導(dǎo)航在車輛的重要性也日益凸顯,研究人員對(duì)其研究也越來(lái)越多。目前對(duì)車輛的導(dǎo)航使用最多的是全球定位系統(tǒng)(GPS),其能夠提供高精度的位置、速度,但是在高樓區(qū)、山區(qū)、隧道等環(huán)境下,GPS 信號(hào)容易失效導(dǎo)致不能定位[1,2]。研究人員對(duì)組合導(dǎo)航在車輛上應(yīng)用開始研究,如衛(wèi)星導(dǎo)航/地圖匹配組合[3]、衛(wèi)星導(dǎo)航/MIMU 組合[4]等方式來(lái)補(bǔ)充GPS 信號(hào)失效時(shí)對(duì)車輛的導(dǎo)航。衛(wèi)星導(dǎo)航/微慣性組合導(dǎo)航又分為松散組合和緊組合兩種方式[5]。松散組合僅僅利用GPS 提供的位置和速度信息對(duì)MIMU系統(tǒng)進(jìn)行校正,而微慣導(dǎo)系統(tǒng)不能反過(guò)來(lái)對(duì)GPS進(jìn)行修正且需要四顆衛(wèi)星同步觀測(cè)。緊組合是利用GPS 的多普勒速度和載波相位等原始信息與MIMU 系統(tǒng)進(jìn)行組合導(dǎo)航,兩者的信息可以相互校正且在極端的情況下有一顆衛(wèi)星信息即可進(jìn)行導(dǎo)航解算,利用兩種導(dǎo)航誤差的獨(dú)立性、不相關(guān)性能夠使組合導(dǎo)航輸出更高精度的導(dǎo)航信息。筆者采用MIMU/GPS 系統(tǒng)緊組合方式組合導(dǎo)航,設(shè)計(jì)利用GPS 接收機(jī)接收衛(wèi)星信號(hào)的原始信息(多普勒速度和載波相位)與微觀性系統(tǒng)提供的姿態(tài)信息、電子羅盤提供的姿態(tài)信息進(jìn)行組合導(dǎo)航,建立緊組合導(dǎo)航系統(tǒng)的狀態(tài)方程和量測(cè)方程,利用卡爾曼濾波輸出車輛的姿態(tài)信息。
1 GPS 載波相位和多普勒速度的數(shù)學(xué)模式
緊組合導(dǎo)航系統(tǒng)需要利用GPS 接收機(jī)接收衛(wèi)星信號(hào)的偽距、多普勒速度和載波相位信息,因此要首先建立其數(shù)學(xué)模型,以供緊組合系統(tǒng)的量測(cè)方程使用。首先根據(jù)GPS 載波相位測(cè)量的基本原理[6],得到GPS 衛(wèi)星到接收機(jī)的偽距ρ,其線性化的載波相位方程為:

其中方程式是在地球坐標(biāo)系下計(jì)算求得的,c 是衛(wèi)星位置到估測(cè)接收機(jī)位置的距離;h 是從衛(wèi)星到GPS 接收機(jī)的單位向量;P 是接收機(jī)的真實(shí)位置是估測(cè)得到的接收機(jī)位;λ 是載波波長(zhǎng);N 是載波的整周數(shù)dP(ti)是廣播軌道偏差,△ts是衛(wèi)星鐘差、△tR是接收機(jī)R 鐘差、datm(ti)是載波信號(hào)傳播的大氣層延遲、MP 是多路徑效應(yīng),η 是由噪聲等誤差源引起的量測(cè)噪聲誤差[7]。
根據(jù)GPS 測(cè)速基本原理得到多普勒測(cè)速方程[5],其線性化的測(cè)速方程為:
其中方程式是在地球坐標(biāo)系下計(jì)算得到的,Vs是 GPS 衛(wèi)星真實(shí)的速度;是估測(cè)得到的GPS 接收機(jī)的速度;VR是GPS 接收機(jī)的真實(shí)速度是對(duì)時(shí)間相關(guān)誤差量求導(dǎo);
利用兩臺(tái)接收機(jī)接收到的數(shù)據(jù)并結(jié)合式(1)和式(2)分別得到接收機(jī)1、接收機(jī)2 的GPS 載波相位方程和多普勒測(cè)速方程,并對(duì)其進(jìn)行作差處理,得到站際單差的相位差方程和速度差方程,即為:
其中,χ(ti)=datm(ti)+MP 是大氣層延遲與多路徑效應(yīng)誤差之和,再進(jìn)一步的求差,能夠?qū)⑵浜雎缘簟I蠘?biāo)(m)是該量為衛(wèi)星m 的量,下標(biāo)1或2 表示的是接收機(jī)l 或2 的量。
在得到的站際單差的基礎(chǔ)上,進(jìn)行星際單差。根據(jù)式(3)與式(4)將衛(wèi)星 m 和 q 衛(wèi)星的站際單差的相位方程和速度方程分別作差可以得到站際、星際雙差的相位差方程和速度差方程,即為:
2 緊組合系統(tǒng)的狀態(tài)方程和量測(cè)方程
筆者設(shè)計(jì)的緊組合導(dǎo)航系統(tǒng)是利用GPS 接收機(jī)提供的多普勒速度和載波相位原始信息與微觀性系統(tǒng)提供的姿態(tài)信息、電子羅盤提供的航向信息進(jìn)行組合導(dǎo)航,因此選取微觀性系統(tǒng)的平臺(tái)失準(zhǔn)角、速度誤差、位置誤差、慣性器件誤差以及電子羅盤誤差作為狀態(tài)變量,并采用東北天坐標(biāo)系,則其緊組合系統(tǒng)的狀態(tài)方可以表示為:

其中,X 為18 維的狀態(tài)變量,即
其中下標(biāo)e、n、u 表示的是東北天向,即東北天地理坐標(biāo)系,Φe、Φn、Φu是東北天地理坐標(biāo)系的平臺(tái)失準(zhǔn)角,δVe、δVn、δVu是東北天地理坐標(biāo)系的速度誤差,δφ、δλ、δh是東北天地理坐標(biāo)系的緯度、經(jīng)度和高度位置誤差,εx、εy、εz是東北天地理坐標(biāo)系的各軸向上的陀螺漂移,△x、△y、△z是東北天地理坐標(biāo)系的各軸向上的加速度計(jì)零偏,ΦEx、ΦEy、ΦEz是東北天地理坐標(biāo)系的電子羅盤的測(cè)量誤差。
W 為系統(tǒng)的噪聲向量,即

A 為18×18 維的系統(tǒng)狀態(tài)轉(zhuǎn)移矩陣,其形式為:
B 為18×9 維的系統(tǒng)噪聲矩陣,其形式為:
其中,T3×3為捷聯(lián)矩陣 Tbn,A1,A2,A3,A4,A5,A6,A7,A8,A9的具體表達(dá)式如下:
筆者設(shè)計(jì)的緊組合導(dǎo)航系統(tǒng)的量測(cè)方程由兩部分組成:一是微觀性系統(tǒng)提供的姿態(tài)誤差與電子羅盤提供的姿態(tài)誤差之間的差值作為組合導(dǎo)航的量測(cè)量,二是利用GPS 接收機(jī)接收衛(wèi)星信號(hào)的原始信息,多普勒速度與載波相位數(shù)學(xué)模型作為量測(cè)量。首先是建立微觀性系統(tǒng)提供的姿態(tài)誤差與電子羅盤提供的姿態(tài)誤差之間的差值作為量測(cè)量[8],可表示為:
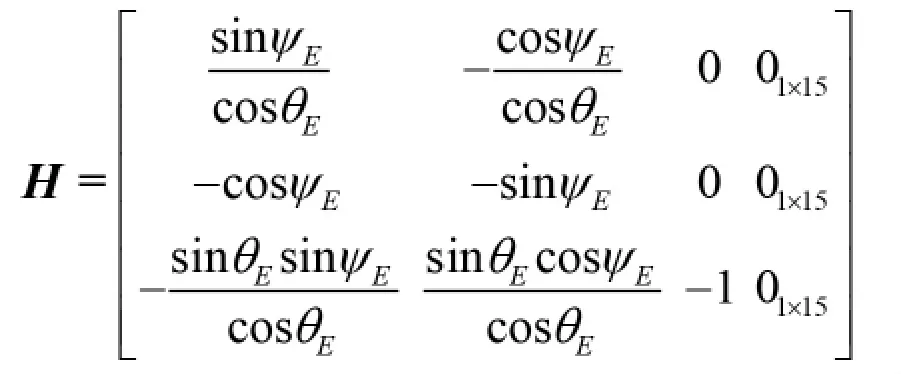
其中 δγ、δθ、δψ 是橫搖角、縱搖角和航向角的誤差角,γM、θM、ψM是微慣性輸出的橫搖角、縱搖角和航向角,γE、θE、ψE是電子羅盤輸出的橫搖角、縱搖角和航向角。
X 為18 維的狀態(tài)變量,W 為三維的量測(cè)噪聲矩陣,H 為量測(cè)矩陣,其表達(dá)形式為:
建立利用GPS 接收機(jī)提供原始信息的量測(cè)量,根據(jù)筆者在第2 部分得到的式(5),是在地球坐標(biāo)系下的載波相位雙差方程,將其轉(zhuǎn)換到導(dǎo)航坐標(biāo)系下[9],并整理改寫為:

同理,根據(jù)筆者在第2 部分得到的式(6),將其轉(zhuǎn)換到導(dǎo)航坐標(biāo)系下[9],并整理改寫為:

根據(jù)前面的介紹,式(9)和式(10)的組合即為GPS 部分量測(cè)方程:

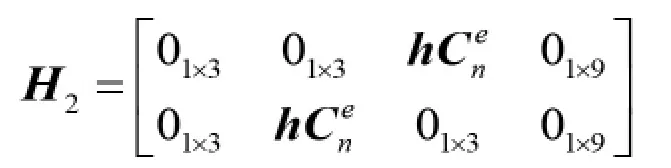
其中,W2為GPS 部分的量測(cè)噪聲矩陣, 可以表示為 W2=[μ μ']T,H2為量測(cè)矩陣,其表達(dá)形式為:
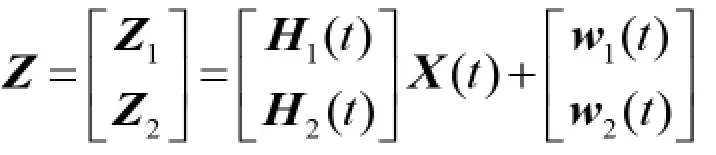
將上述兩部分的量測(cè)方程合并,得到微慣性/電子羅盤/GPS 緊組合系統(tǒng)的量測(cè)方程,即為:
3 試驗(yàn)與分析
為了驗(yàn)證筆者設(shè)計(jì)的緊組合系統(tǒng)性能,進(jìn)行跑車試驗(yàn)。試驗(yàn)過(guò)程采用實(shí)驗(yàn)室購(gòu)置的法國(guó)iXSEA 公司生產(chǎn)的PHINS 捷聯(lián)慣導(dǎo)系統(tǒng)作為參考基準(zhǔn),在試驗(yàn)車上固定安裝好MTi-G 航姿系統(tǒng)和PHINS 捷聯(lián)慣導(dǎo)系統(tǒng),同時(shí)利用自編軟件實(shí)現(xiàn)串口為100Hz 的采樣頻率,同步采集各個(gè)系統(tǒng)輸出數(shù)據(jù)。主GPS 天線處于固定位置,為了更好接受衛(wèi)星信號(hào),移動(dòng)GPS 天線位于靠車窗位置。
完成跑車試驗(yàn)數(shù)據(jù)采集之后,截取1 小時(shí)車載試驗(yàn)數(shù)據(jù),利用微慣性/GPS/電子羅盤緊組合算法進(jìn)行離線處理,所繪制姿態(tài)估計(jì)曲線與PHINS 捷聯(lián)慣導(dǎo)系統(tǒng)輸出的參考姿態(tài)曲線對(duì)比圖如圖1 所示,兩者之間的姿態(tài)誤差曲線如圖2所示。
根據(jù)圖1 可以看出,筆者提出MIMU/GPS 緊組合系統(tǒng)的組合姿態(tài)與捷聯(lián)慣導(dǎo)參考的姿態(tài)之間誤差很小,可以說(shuō)明本算法跟蹤效果良好,圖2 所示的姿態(tài)誤差曲線直接描述了本系統(tǒng)算法的誤差:縱橫搖誤差為±0.2°,航向誤差則為±2°。綜上分析可知,筆者設(shè)計(jì)的緊組合系統(tǒng)算法對(duì)車輛的姿態(tài)具有較好的精度。
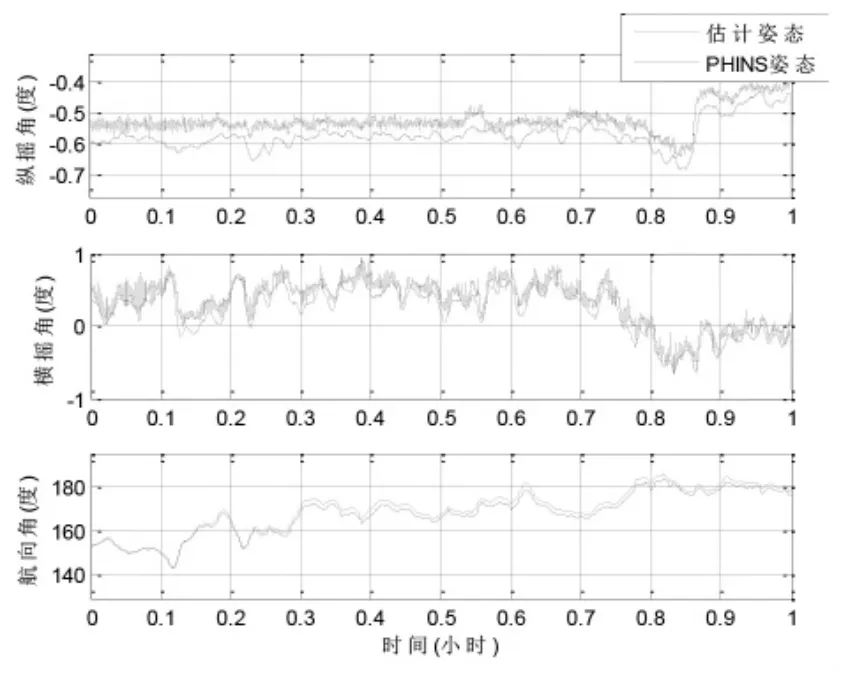
圖1 緊組合導(dǎo)航系統(tǒng)輸出姿態(tài)與PHINS 慣導(dǎo)輸出姿態(tài)對(duì)比圖
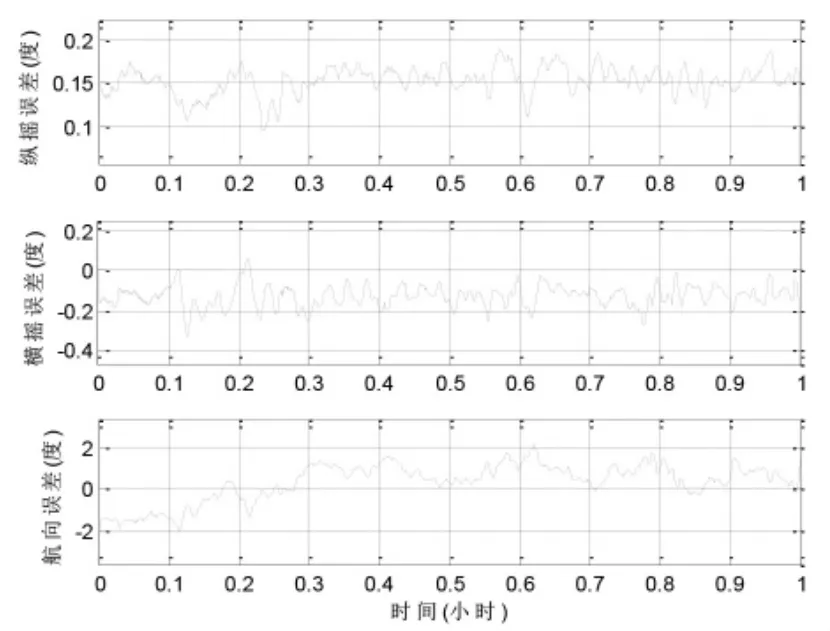
圖2 緊組合導(dǎo)航系統(tǒng)輸出姿態(tài)誤差曲線圖
4 結(jié)語(yǔ)
筆者設(shè)計(jì)了在車輛導(dǎo)航中的MIMU/GPS 緊組合導(dǎo)航系統(tǒng)。詳細(xì)推導(dǎo)了GPS 系統(tǒng)的載波相位雙差方程和速度雙差方程的數(shù)學(xué)模型,在此基礎(chǔ)上建立緊組合導(dǎo)航系統(tǒng)的狀態(tài)方程和量測(cè)方程,并利用卡爾曼濾波輸出車輛導(dǎo)航的姿態(tài)信息。最后,通過(guò)車載采集各個(gè)系統(tǒng)輸出數(shù)據(jù),系統(tǒng)算法離線處理的實(shí)驗(yàn)證明了該組合方案有效地控制了車輛姿態(tài)的誤差,車輛導(dǎo)航精度得到提高。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32