空管自動化系統CFL高度保護參數設置方法研究
2021-10-12 07:58:32席佳睿
科學與信息化 2021年25期
席佳睿
中國民用航空華北地區空中交通管理局 北京 100621
引言
短期沖突告警(STCA)是空管自動化系統中重要的告警項之一,STCA告警是指當航跡之間的水平和垂直間距同時小于或者在設定的告警時間內將要同時小于設置的參數值時,系統產生的告警[1]。為了提高STCA告警在航空器垂直間隔告警計算中的精確性、合理性,需要考慮CFL高度保護參數的設置。目前空管自動化系統中CFL高度保護參數均為根據經驗設定的固定值。但在復雜多變的實際運行中,若CFL高度保護參數值設定不合理將嚴重影響STCA告警在垂直方向上的計算精度及準確性。因此,尋找一種合理的CFL高度保護參數設定方法是空管自動化系統迫切需要解決的關鍵問題之一。
針對上述CFL高度保護參數只能憑借經驗設定的問題,本文提出一種基于航空器升降率動態調節CFL高度保護參數的方法,該方法能有效降低STCA告警的虛警率并能提高STCA告警精度。
1 STCA告警原理
當兩航空器航跡之間的水平和垂直間距同時小于或者在設定的告警前探時間內將要同時小于設置的參數值時觸發STCA告警[2]。因此,根據兩航空器間的距離STCA告警可分為預警、告警兩個階段。當系統判斷在前探時間內,兩航空器間的距離將會小于門限距離時系統會觸發STCA預警,當系統判斷兩航空器間的距離已小于門限距離時系統會觸發STCA告警。
為了方便判斷兩航空器之間的距離及時向管制員發出STCA預警、告警信號,空管自動化系統根據STCA告警原理為每架航空器劃設了STCA預警、告警區。當系統發現有其他航空器進入到當前航空器的STCA預警區域內時觸發STCA預警,當系統發現有其他航空器進入到當前航空器的STCA告警區域內時觸發STCA告警。水平和垂直方向的STCA預警、告警區定義如下:
水平方向上STCA告警區域為:以航空器為圓心r1為半徑的圓形區域,其中r1表示STCA水平告警門限值。
水平方向上STCA預警區域為:以航空器為圓心r2為半徑的圓形區域。

其中,T表示系統設定的前探時間,一般設定為90s,v1表示當前航空器在水平方向的速度。水平方向STCA告警區及預警區如圖1所示。
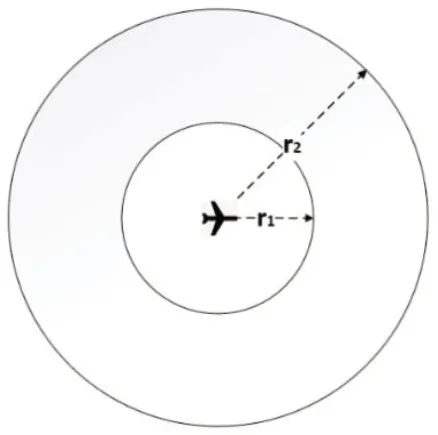
圖1 水平方向STCA預警及告警區域
垂直方向上STCA告警區域為:H±h1之間的區域,其中,H表示當前航空器所在高度,h1表示垂直告警門限值。
垂直方向上STCA預警區域為:

與垂直方向上STCA告警區之間的區域,其中,H表示當前航空器所在高度,h1表示垂直告警門限值,T表示系統設定的前探時間,一般設定為90s,v2表示當前航空器在垂直方向的升降速度。垂直方向STCA告警區及預警區如圖2所示。
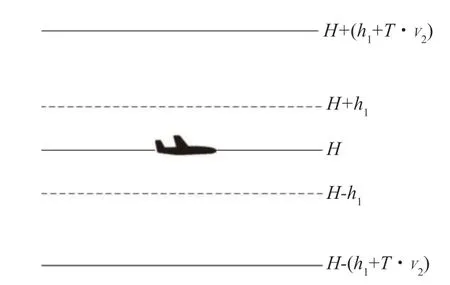
圖2 垂直方向STCA預警及告警區域
2 CFL高度保護機制
當管制員對航空器下達了CFL指令高度后,航空器開始爬升或下降,但由于系統設置了STCA告警前探時間,航空器在開始爬升或下降過程中極有可能進入STCA垂直方向預警區,從而觸發STCA虛預警。例如航空器A在航空器B的下方平飛,管制員向航空器B下達了新的指令高度,該指令高度低于航空器B的當前高度且高于航空器A的短期沖突告警區高度,假設系統設定的前探時間為90s,當航空器B開始下降時,系統經過推算發現90s后航空器B會進入航空器A的STCA告警區,于是系統判定航空器B觸發了STCA預警,但實際上航空器B下降30s后就到達了指令高度并由下降轉為平飛,屬于正常運行,不應出現STCA預警提示。
針對以上問題,《空中交通管制自動化系統最低安全高度告警及短期飛行沖突告警功能(MH-T_4022-2006)》規定STCA告警在垂直方向上進行垂直沖突探測時,對具有CFL數據的航空器采用CFL高度層保護計算,CFL高度保護如圖3所示。
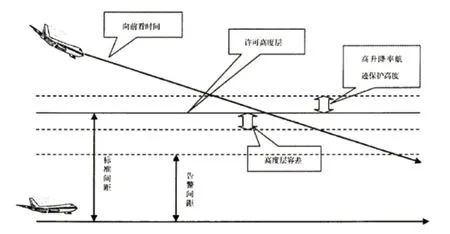
圖3 CFL高度保護示意
當航空器處于上升或下降狀態并具有有效的CFL值時,系統使用CFL加上(上升)或減去(下降)高度層容差值,作為航空器推測高度的上限(上升)或下限(下降),進行垂直沖突檢測。當航空器通過CFL,并已穿過高度層容差時,系統不再使用CFL容差高度作為推測高度的極限,探測垂直沖突。在航空器上升、下降率大于規定的升降率門限值時,同時航空器尚未達到CFL,但與CFL的高度差已小于升降率航跡保護高度值時,系統不再使用CFL容差高度作為推測高度的極限,探測垂直沖突。當用戶未輸入CFL數據,或已注銷成無效時,系統不采用CFL高度層保護計算。
此外,在(MH-T_4022-2006)中還規定了高度層容差、升降率門限、升降率航跡保護高度三個CFL高度保護參數的設置范圍。具體參數設置范圍如下:
CFL高度層容差值:(10~150)m;
CFL升降率門限值:(5~20)m/s;
CFL升降率航跡保護高度值:(10~150)m。
3 CFL高度保護參數設置方法
CFL高度層容差值和CFL升降率航跡保護高度值的設置對STCA告警在垂直方向上的計算較為重要。當航空器升降率較大時,若CFL高度層容差值及CFL升降率航跡保護高度值取值過小會導致垂直方向上的沖突探測過于靈敏,從而引起STCA虛預警;當航空器升降率較小時,若CFL高度層容差值及CFL升降率航跡保護高度值取值過大又會導致STCA預警遲鈍、告警精度較差,告警無法滿足管制員實際需求[3]。因此,為了降低STCA虛警率提高STCA告警精度,CFL高度層容差值和CFL升降率航跡保護高度值的取值需要充分考慮當前航空器的升降率大小。
然而空管自動化在用系統中CFL高度層容差值和CFL升降率航跡保護高度值均為憑人工經驗設定的固定值,并沒有考慮當前航空器升降率的大小對STCA告警在垂直方向上計算造成的影響,國內某機場空管自動化設備CFL高度保護參數設置如圖4所示。針對上述問題,下面介紹一種基于航空器升降率動態設定CFL高度保護參數的新方法。
圖4 國內某機場空管自動化設備
3 CFL高度保護參數
3.1 參數定義
為方便進行問題的數學描述,現對空管自動化系統動態設定CFL高度保護參數過程中用到的相關參數做如下定義:
3.1.1 CFL高度層容差值:X,單位為米,該值是根據當前航空器升降率計算得到的一個變量,根據(MH-T_4022-2006)中的規定X取值范圍為(10~150)m。
3.1.2 CFL高度層容差值最大值:X1,單位為米,該值為固定值且取值150m。
3.1.3 CFL高度層容差值最小值:X2,單位為米,該值為固定值表示管制員可接受的CFL高度層最小容差值,該值可根據管制需求進行設置,最小不可小于10m。
3.1.4 CFL升降率航跡保護高度值:y,單位為米,該值是根據當前航空器升降率計算得到的一個變量,根據(MHT_4022-2006)中的規定y取值范圍為(10~150)m。
3.1.5 CFL升降率航跡保護高度值最大值:Y1,單位為米該值為固定值且取值150m。
3.1.6 CFL升降率航跡保護高度值最小值:Y2,單位為米,該值為固定值表示管制員可接受的CFL升降率航跡保護最小高度值,該值可根據管制需求進行設置,最小不可小于10m。
3.1.7 航空器當前高度:h,單位為米,該值是根據航空器當前高度實時變化的一個變量。
3.1.8 航空器當前升降率:r,單位為米/秒,該值是根據航空器當前升降率實時變化的一個變量。
3.1.9 CFL升降率門限值:R,單位為米/秒,該值為固定值,可根據經驗進行設定,根據(MH-T_4022-2006)中的規定R取值范圍為(5~20)m/s。
3.1.10 指令高度:C,單位為米,該值為固定值,表示管制員下達的CFL指令高度。
3.2 動態參數計算方法
下面介紹根據航空器實時高度和升降率計算與該航空器相匹配的CFL高度層容差值及CFL升降率航跡保護高度值的方法(均以航空器下降時為例,航空器上升時計算方法類似)。
3.2.1 當航空器當前高度h高于C+Y1或低于C–X1時,不計算CFL高度層容差值X以及CFL升降率航跡保護高度值y。
3.2.2 當航空器當前高度h低于C+Y1高于C–X1且當前下降率r大于CFL升降率門限值R時,不計算CFL高度層容差值X以及CFL升降率航跡保護高度值y。
3.2.3 當航空器當前高度h低于C+Y1高于C且下降率r小于R時,系統計算針對該航班的CFL升降率的航跡保護高度值y,計算方法如下:

3.2.4 當航空器當前高度h低于C且高于C–X1且下降率r小于R時,系統計算針對該航班的CFL高度層容差值X,計算方法如下:

由式(3)、式(4)可知,當航空器下降率較大時,CFL高度層容差值、CFL升降率航跡保護高度值也隨之變大,航空器可得到足夠寬的CFL高度保護區,從而有效減少垂直方向沖突探測因CFL高度保護區不夠寬造成的虛預警;當航空器下降率較小時,CFL高度層容差值、CFL升降率航跡保護高度值也隨之變小,航空器可得到與當前下降率相匹配的CFL高度保護區域,從而有效提高垂直方向沖突探測的精度。
4 結束語
本文針對空管自動化系統短期沖突告警(STCA)在進行垂直方向的推測計算時因CFL高度保護參數設定不合理導致的虛警率較高、告警推測精度較差的問題,提出一種基于航空器升降率的CFL高度保護參數動態設定方法。該方法充分考慮了航空器實時升降率對STCA垂直方向沖突探測的影響,根據航空器的升降率動態調整CFL高度保護參數。通過與傳統憑經驗設定CFL高度保護參數的方法對比,該方法可有效降低STCA虛警率、提高告警精度,該方法在空管自動化系統告警參數設置中具有很高的工程價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
