多目標分類智能垃圾箱電控設計研究
2021-10-13 10:24:54程軍曹鑫楠王中昊胡嘉格袁丹
電子制作 2021年19期
程軍,曹鑫楠,王中昊,胡嘉格,袁丹
(重慶交通大學,重慶,400074)
0 引言
隨著提倡環保的呼聲日益提高,社會對垃圾分類越來越重視,不少城市實行了垃圾強制分類措施。但隨之而來的是居民對垃圾種類的認識不夠清楚的問題。近年來,智能垃圾箱的使用受到廣泛關注,它可以在一定程度上代替人工,提高垃圾分類準確率。本裝置所具有的示教功能可以幫助提高居民垃圾分類意識,從源頭上解決現實生活中垃圾分類準確率低的問題。城市生活垃圾分類收集已經是大勢所趨、不能回避。為此設計了一種具有多目標分類和示教功能的智能垃圾箱。
1 系統硬件設計
本裝置是通過Linux嵌入式系統為核心的多目標分類智能垃圾箱。首先垃圾箱的圖像模塊通過調用OpenCV算法尋找圖像中目標垃圾的數量和位置,分別傳入模板識別和InceptionResNet V2神經網絡識別,最終可得出目標物所在的位置和種類。其次,通過語音模塊、顯示模塊播報目標物體所屬垃圾種類和顯示中英文名稱,然后通過控制模塊驅動各部分機械結構將目標垃圾投入對應容納桶中,最后通過超聲波測距傳感器對桶內剩余容量進行監測。電源模塊分為包括電池降壓模塊和鋰聚合物電池。電池提供整個裝置所需電源,電池降壓模塊準確地輸送各個模塊所需電流,保證各個模塊供電正常,實現穩定操作。
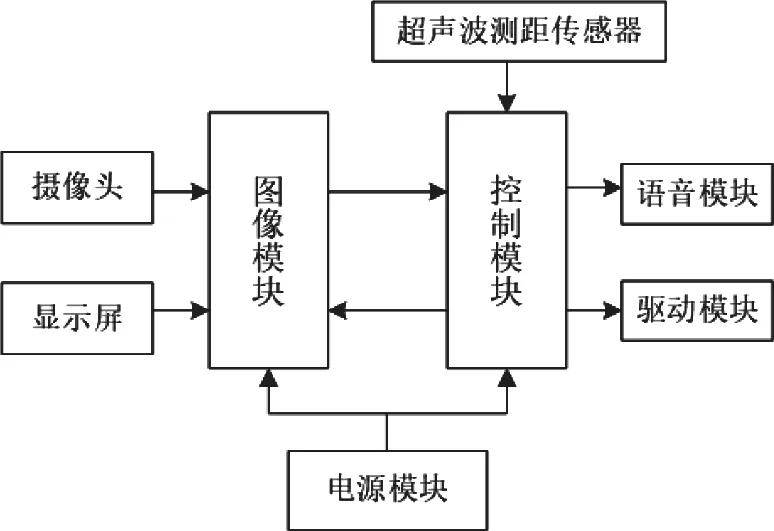
圖1 系統硬件原理框圖
2 系統主要模塊設計
2.1 圖像模塊
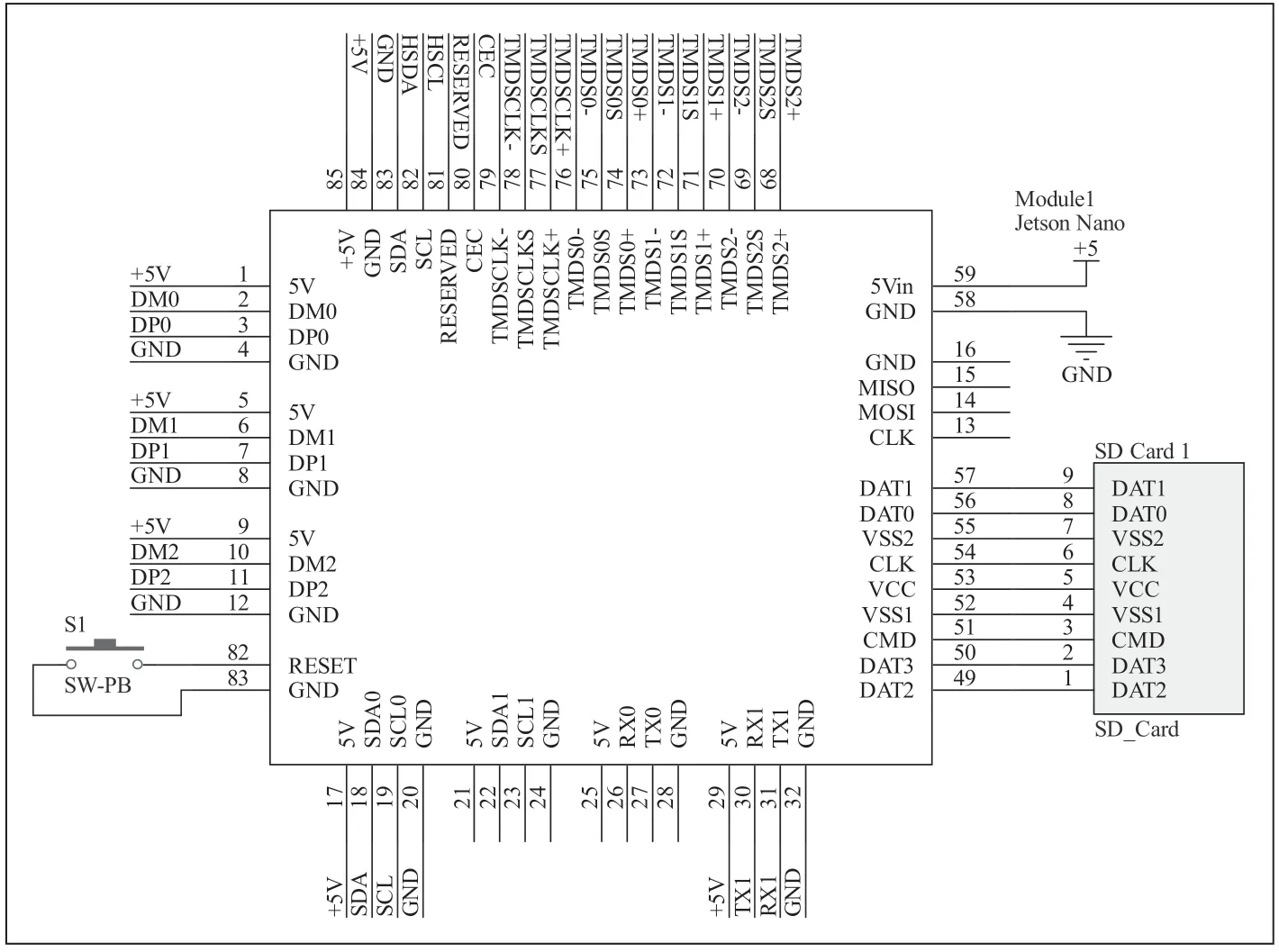
圖2 圖像模塊主控芯片電路原理圖
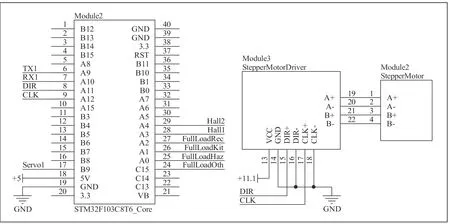
圖3 控制模塊電路原理圖
圖像模塊采用NVIDIA Jetson Nano作為主控芯片,其內部搭載四核ARM CORTEX-A57處理器、128核MAXWELL GPU和4GB LPDDR內存,能夠為裝置帶來足夠的AI算力,足以滿足本裝置圖像處理的性能需求。同時選用的Jetson開發板具有四個USB3.0和一個USB2.0 Micro-B接口,具有豐富的外設接口,因此帶來了較高的可拓展性。
攝像頭采用SCCB總線和主控芯片進行通信。主控芯片通過串口與控制模塊連接和通信。
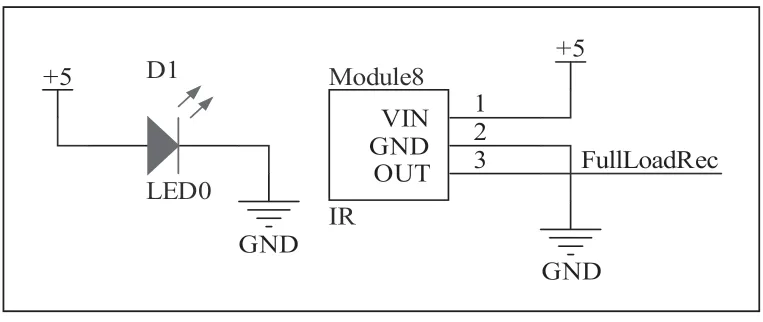
圖4 滿載檢測模塊電路原理圖
2.2 控制模塊
控制模塊主要由STM32實時控制系統組成,采用基于ARM Cortex-M內核的STM32F103C8T6微控制器。該STM32微控制器使用MircoUSB接口供電和連入相應的電路,方便USB設備的開發。
圖像模塊經過綜合處理后將控制命令發回STM32實時控制系統,控制系統通過控制驅動模塊以此實現對目標垃圾的分類。
2.3 滿載檢測模塊
本裝置對應現行城市垃圾分類制度,設置有四種包括干垃圾、濕垃圾、有害垃圾和可回收垃圾的容納桶。上述容納桶頂部均設有超聲波測距傳感器,選用HC-SR04超聲波模塊,其采用IO觸發測距,具有性能穩定,測度距離精確的優點。
所述超聲波測距傳感器可對上述容納桶進行滿容量檢測,若達到滿容量的75%,則通過與英偉達Jetson開發板電氣連接的蜂鳴器和LCD顯示屏發出聲光警。
2.4 顯示模塊
顯示模塊包括USB電容觸摸屏和LCD顯示屏,用戶可通過電容觸摸屏實現對智能垃圾箱模式和功能的選擇,通過顯示屏查看攝像頭畫面、垃圾分類結果、電池剩余電量、容納桶的剩余容量等。LCD屏幕采用常規LCD總線和Jetson開發板進行通信,Jetson開發板將實時處理后的圖像展示在LCD屏幕上,并將信息反饋給用戶。
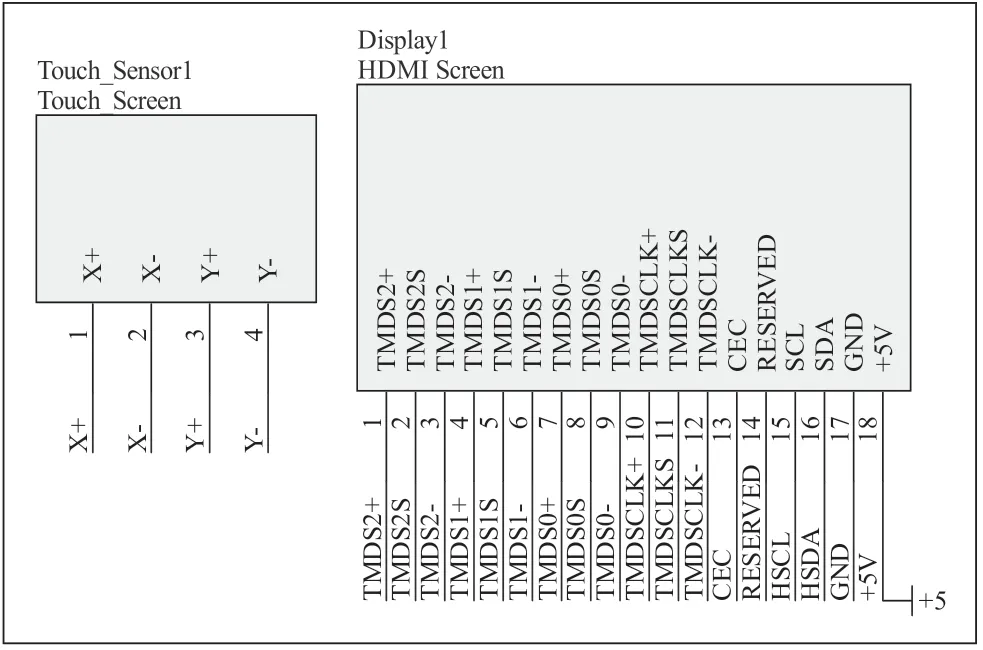
圖5 顯示模塊電路原理圖
3 系統軟件設計
系統開啟后,首先對程序進行初始化。將單個或多個目標垃圾從投放口投入,垃圾停留在輸送帶機構上,位于識別區頂部的攝像頭對垃圾進行拍攝,獲得多張垃圾圖像,英偉達Jetson開發板接受垃圾圖像并進行特征學習,并將其運算結果發送到STM32實時控制系統。通過語音模塊播報目標垃圾種類,通過顯示模塊顯示目標垃圾的中英文翻譯,并可通過點擊顯示屏進行英文跟讀,當智能垃圾箱處于等待垃圾投放狀態時將循環播放垃圾分類宣傳片,實現了本裝置的示教作用。
本裝置的圖像識別方法具體實施時,首先使用掩膜遮擋非傳送帶區域,然后對掩膜處理后的圖像進行閾值處理,消除大部分環境光干擾,再進行侵蝕操作,去除無關斑點干擾,最后使用Findcontours操作尋找圖像中有效垃圾輪廓,裁剪傳入神經網絡。
在圖像模塊完成對目標垃圾的識別后,驅動模塊開始工作,通過控制相應的機構將目標垃圾投入對應容納箱。接下來根據圖6和圖7詳細介紹本裝置的分類流程。
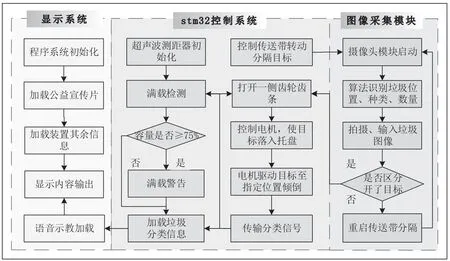
圖6 系統軟件原理框圖

圖7 智能垃圾箱模型示意圖
(1)若圖像模塊檢測到目標物為多種垃圾,則STM32實時控制系統通過控制齒輪齒條模塊將輸送帶前方區域阻隔,隨后電機正轉控制輸送帶設備將多個垃圾輸送至分隔擋板區域;此時攝像頭再次啟動采集多張垃圾圖像,檢查目標垃圾是否已經分開。
①若已分開則舵機控制其中一側齒輪齒條移開,使目標垃圾落入傳動區的托盤位置,通過同步帶機構和舵機云臺機構將垃圾正確投放至容納桶中;待一側的目標垃圾分類完畢后,再打開另一側的齒輪齒條機構完成對剩余垃圾的分類。
②若未分開則電機驅動輸送帶反轉,將垃圾在后置弧形擋板聚攏后再次分類,重復以上操作直至將所有目標垃圾均投放至所述容納桶中。
(2)若圖像模塊檢測到目標物為一種垃圾,則不運行齒輪齒條模塊,直接通過輸送帶機構將目標垃圾輸送到前方的托盤上,接著通過同步帶機構實現在托盤及目標物的前后運動,再通過舵機云臺機構實現翻轉運動,從而將目標垃圾正確投放到相應容納桶中。
最后滿載檢測模塊實時對容納桶的使用容量進行監測,若使用容量已經達到75%,則通過語音模塊和顯示模塊發出聲光警報。本裝置在應用到城市垃圾管理系統時,當容納桶內剩余容量不足時,可發信息給區域垃圾管理員,便于及時地對智能垃圾箱已分類的垃圾進行收集處理和進行對智能垃圾箱的清潔工作。
4 結語
本裝置是基于Linux嵌入式控制系統的多目標分類智能垃圾箱,很好地實現了對多個目標垃圾的識別并分類,解決了目前多數智能垃圾箱不能進行多目標分類的難點。通過語音模塊和顯示模塊實現了垃圾分類宣傳片循環播放、語音播報垃圾種類、英文跟讀,具有顯著的示教作用,能夠提高居民垃圾分類意識,同時為今后建立區域化垃圾管理系統[5]提供了一種可行的思路和可靠的保障。這種分類效率高,生產成本低的多目標智能分類垃圾箱滿足當前城市迫切需要對生活垃圾進行合理化回收,進行資源再利用的剛性需求,具有廣闊的市場前景。
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06