無人機升降舵位移異常分析與改進設計
2021-10-14 10:34:04楊竣博
西安航空學院學報 2021年3期
吳 斌,閆 修,楊竣博
(中國電子科技集團公司第三十八研究所 浮空平臺部,合肥 230088)
0 引言
升降舵作為無人機的主操縱舵面,主要用于控制無人機俯仰運動來實現無人機的下降或爬升,在飛行過程中起到極其重要的作用。升降舵一旦失去舵效,將很難維持正常飛行,只能結束飛行任務,嚴重時甚至會危及飛行安全,造成巨大損失[1]。因此,升降舵操縱性能的優劣關系到無人機的飛行性能和安全性[2-3]。
某型無人機在飛行試驗結束后,進行飛行參數分析時發現升降舵驅動舵機的實際位移與理論值相比存在過大和變化過快的現象。本文對升降舵驅動舵機位移異常的原因進行分析,對舵機支撐結構做出改進設計,并進行了試驗驗證。
1 試驗現象
無人機在空中飛行時,為保持高度,升降舵一般會向下偏轉較小角度。受空中復雜環境影響,偏轉角度會不斷調整,但變化不會太大。
某型無人機在完成飛行任務后,進行數據分析時,發現升降舵的位移在平飛階段波動過大,位移峰值超出設計要求,嚴重影響了飛行穩定性,某時間段內升降舵位移隨時間變化曲線如圖1所示。
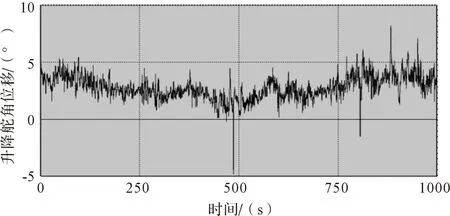
圖1 升降舵位移隨時間變化曲線
2 原因分析
2.1 操縱機構組成
該型無人機是用四桿機構來操縱升降舵的上下偏轉,操縱機構組成如圖2所示。電動舵機支撐結構與平尾的主梁和后梁緊固連接;搖臂安裝在電動舵機的輸出軸上;連桿的一端通過前銷軸與搖臂鉸接,另一端通過后銷軸與升降舵鉸接。當電動舵機工作時,搖臂在扭轉力矩的作用下,可繞輸出軸進行旋轉運動,從而完成升降舵的偏轉或復位。

圖2 操縱機構組成
2.2 位移異常原因分析
對升降舵及其操縱機構進行檢查,未發現結構有損傷和永久變形,說明結構的強度滿足使用要求。因此,升降舵位移異常可能與舵機故障、各關節的間隙、操縱機構的剛度有關。
(1)將舵機進行返廠檢測,結果顯示輸出力矩和傳動誤差滿足指標要求,排除舵機故障造成位移異常[4];
(2)采用三坐標激光跟蹤儀測量升降舵空載下的行程,排除了各關節間隙造成位移異常[5];
(3)通過地面對升降舵施加配重的方式來測量操縱機構的剛度,發現平飛當量載荷下,升降舵有較大位移,表明操縱機構剛度較弱[6]。
因此,初步斷定操縱機構剛度不足是造成升降舵位移異常的主要原因。
3 仿真分析
為了驗證操縱機構剛度不足是造成升降舵舵機位移偏大的原因,開展仿真分析,結果發現舵機安裝結構剛度不足,會產生較大傳動誤差。
3.1 建立有限元模型
依據操縱機構的結構形式和各構件的受力情況,僅對變形敏感部位的結構建立有限元分析模型,對操縱機構在無人機平飛工況下的結構強度和剛度進行仿真分析。變形敏感部位的有限元模型如圖3所示。

圖3 變形敏感部位的有限元模型
3.2 各構件材料及力學參數
升降舵舵機為成品,其力學特性已在試驗室測得,滿足技術指標要求,分析時作為剛體計算,其余構件的材料型號及力學參數見表1所示。

表1 其余構件的材料型號及力學參數
3.3 仿真結果
操縱機構應力云圖如圖4所示。結果顯示,在平飛狀態下操縱結構的最大應力為298.3 MPa,位于支撐結構上的升降舵舵機安裝孔附近,搖臂的最大應力為20 MPa。由此得出,改進前的操縱機構強度滿足使用要求。

圖4 操縱機構應力云圖
操縱機構變形云圖如圖5所示。可知,在極限載荷下操縱機構的最大位移為1.54 mm,位于搖臂與連桿的交匯點。變形后的操縱機構導致傳動誤差過大,控制系統要加大出舵量,并不斷調整升降舵的位移,由此出現位移波動過大現象。經過計算得出由于操縱機構的變形產生約為1.8°的傳動誤差,不滿足技術指標要求。

圖5 操縱機構變形云圖
將搖臂與舵機輸出軸固定,施加相同載荷,得出在極限載荷下搖臂的最大變形量為0.014 mm,搖臂變形云圖如圖6所示。經計算,因搖臂變形產生約為0.014°的傳動誤差,滿足傳動誤差分配指標。由此,排除搖臂剛度不足是導致升降舵位移異常現象的原因。

圖6 搖臂變形云圖
支撐結構變形云圖如圖7所示。可知,在極限載荷下支撐結構的最大位移為0.78 mm,位于支撐結構上升降舵舵機安裝孔附近。經計算,因支撐結構變形產生約為1.5°的傳動誤差,不滿足傳動誤差分配指標。由此,確定支撐結構剛度不足是導致升降舵位移異常現象的主要原因。
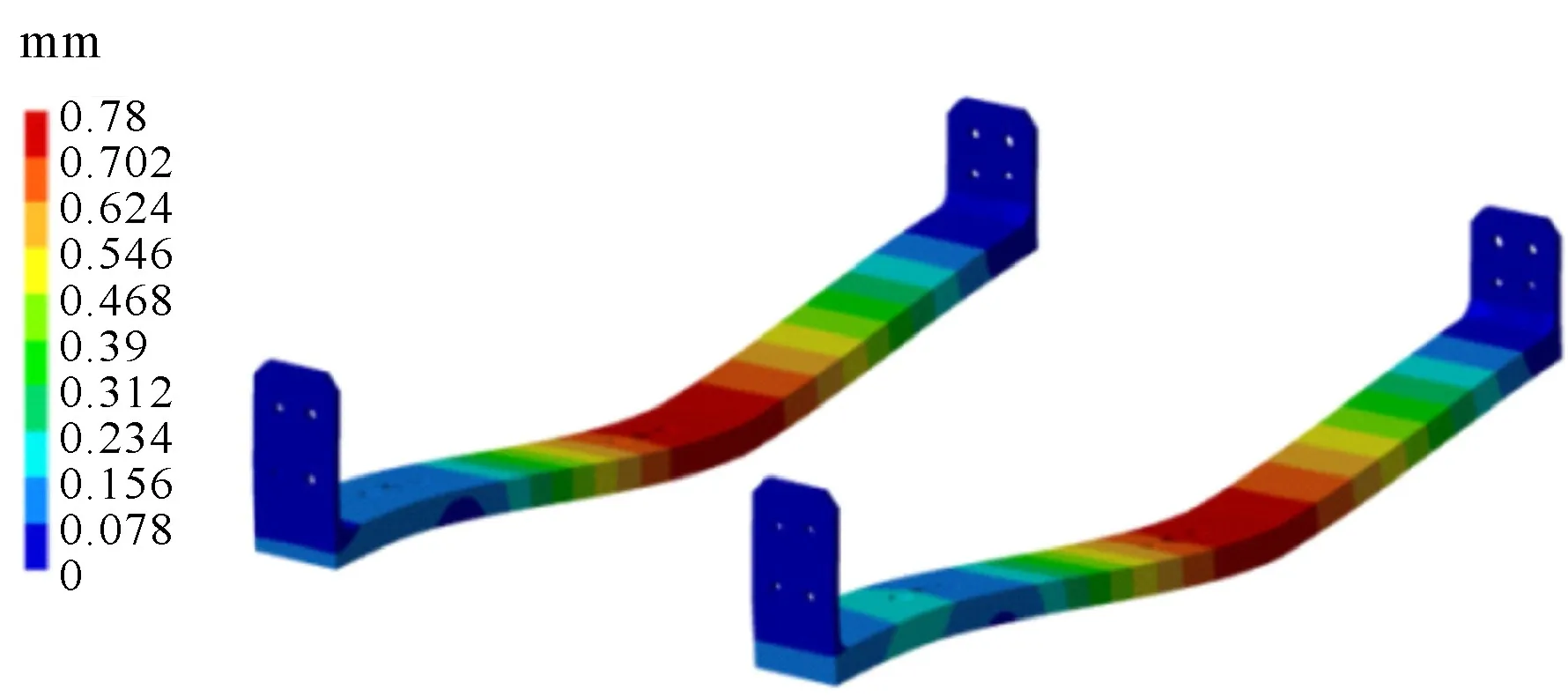
圖7 支撐結構變形云圖
4 改進設計及驗證
針對某型無人機升降舵出現的位移偏大現象,對升降舵舵機支撐結構進行改進設計并加裝,換裝后對操縱機構的剛度進行仿真分析和飛行試驗驗證[7]。
4.1 改進設計
舵機支撐結構由兩個U形梁組成,改進前的舵機支撐結構如圖8所示。為增強支撐結構的剛度,在每個U形梁上加裝一個工形梁,兩者采用平圓頭不銹鋼抽芯鉚釘連接,工形梁結構示意圖如圖9所示,U形梁與工形梁的連接示意圖如圖10所示。工形梁采用彈性模量較高的1Cr18Ni9Ti不銹鋼,改進后的舵機支撐結構如圖11所示。

圖9 工形梁結構示意圖

圖10 U形梁與工形梁的連接示意圖

圖11 改進后的舵機支撐結構
4.2 仿真驗證
將工形梁的數模網格劃分后,代入改進前的有限元模型,約束條件和載荷保持不變,然后進行分析。掛架應力云圖(平飛)如圖12所示,掛架變形云圖(平飛)如圖13所示。從圖12可以看出,與改進前相比,搖臂的應力水平和分布趨勢沒有較大變化,支撐結構的應力水平有較大改善,最大應力降為149.6 MPa,工形梁的最大應力為117.3 MPa,強度滿足要求。由圖13可知,操縱機構的最大位移由1.54 mm降為0.422 mm,較原先設計,變形量降低了1.118 mm,系統剛度得到明顯的改善。

圖12 掛架應力云圖(平飛)
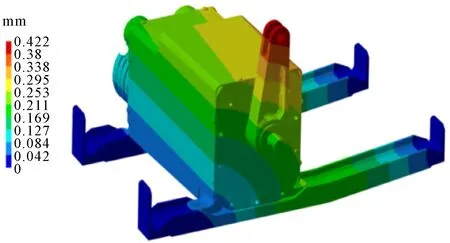
圖13 掛架變形云圖(平飛)
4.3 試驗驗證
將改進后的升降舵操縱機構裝機使用,結合飛行任務同步進行多次驗證試驗,并對使用情況進行持續跟蹤。改進后的升降舵位移曲線如圖14所示。試驗數據表明改進后的升降舵操縱機構剛度得到增強,工作正常、穩定。
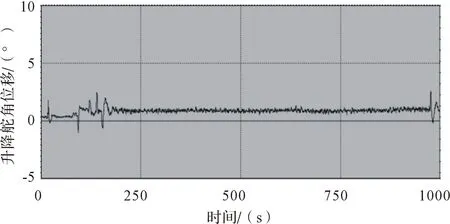
圖14 改進后的升降舵位移曲線
5 結論
針對某型無人機升降舵出現的位移偏大現象,對升降舵舵機安裝結構進行改進設計并加裝使用。加裝后對系統的剛度進行了仿真分析,并進行飛行試驗驗證。仿真和試驗結果表明改進后的升降舵操縱機構剛度符合技術要求,解決了升降舵位移偏大的問題。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2020年1期)2020-09-21 09:24:52
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
