新型電力鐵塔攀爬機(jī)器人的設(shè)計(jì)及攀爬步態(tài)分析
2021-10-20 10:48:48莊紅軍高宏力魯彩江
機(jī)械設(shè)計(jì)與制造 2021年10期
關(guān)鍵詞:機(jī)械
劉 帥,莊紅軍,高宏力,魯彩江
(1.貴州電網(wǎng)有限責(zé)任公司畢節(jié)供電局,貴州 畢節(jié)551700;2.西南交通大學(xué)機(jī)械工程學(xué)院,四川 成都610031)
1 引言
為確保高壓輸電線路穩(wěn)定運(yùn)行,需要定期檢測(cè)和維護(hù)電力系統(tǒng)。人工檢測(cè)輸電線路時(shí)需要攀爬電力鐵塔,該方法工作效率低,有高空墜落的風(fēng)險(xiǎn)[1,2]。因此,電力鐵塔攀爬機(jī)器人的研制迫在眉睫[3,4]。它不僅能提高效率、降低高空墜落風(fēng)險(xiǎn),而且可在不影響供電的情況下進(jìn)行作業(yè),具有廣泛的應(yīng)用前景。
目前,針對(duì)電力鐵塔攀爬機(jī)器人的研究都未能推廣應(yīng)用。四川大學(xué)的陸小龍等人對(duì)電塔攀爬機(jī)器人進(jìn)行了較多研究,設(shè)計(jì)了一種機(jī)械夾持機(jī)構(gòu)[5]。后期他們又設(shè)計(jì)了一種直線推桿機(jī)構(gòu)[1]。哈爾濱工業(yè)大學(xué)的科研團(tuán)隊(duì)模仿昆蟲蠕動(dòng)設(shè)計(jì)了一種電磁吸附攀爬機(jī)器人[6]。總的來(lái)看,運(yùn)動(dòng)方式主要為步進(jìn)式和蠕動(dòng)跨越式,靜態(tài)定位方式主要為機(jī)械夾持式和磁吸附式。機(jī)械夾持式能穩(wěn)定夾持,但結(jié)構(gòu)復(fù)雜,夾持器通用性差:磁吸附式結(jié)構(gòu)簡(jiǎn)單,但穩(wěn)定性有待提高。此外,如何跨越電力鐵塔上螺栓區(qū)等障礙物也是研究難點(diǎn)之一。現(xiàn)階段的設(shè)計(jì)中,機(jī)器人夾持對(duì)象都是電力鐵塔的角鋼,尚未將角鋼上的腳釘加以利用,利用腳釘攀爬能避開角鋼上的眾多障礙,具有研究?jī)r(jià)值。
這里參考了尺蠖攀爬步態(tài),創(chuàng)新性地以角鋼上的腳釘為夾持對(duì)象,采用機(jī)械電磁復(fù)合手爪的夾持方式,設(shè)計(jì)了一種新型電力鐵塔攀爬機(jī)器人并對(duì)攀爬步態(tài)進(jìn)行了分析。機(jī)械電磁復(fù)合手爪結(jié)構(gòu)簡(jiǎn)單,可以在不光滑的角鋼表面實(shí)現(xiàn)穩(wěn)定夾持。以腳釘為夾持對(duì)象的機(jī)器人遵循設(shè)計(jì)的攀爬步態(tài)進(jìn)行攀爬時(shí),可以避開螺栓區(qū)、節(jié)點(diǎn)板等障礙物,解決了避障這一難題。
2 機(jī)器人攀爬對(duì)象的選取
電力鐵塔一般由4根尺寸較大的主材角鋼和一些用于斜拉支撐的輔材角鋼構(gòu)造而成[7]。主材與地基常呈80°傾角布置,布局較為簡(jiǎn)單:而輔材為各種角度的斜拉布置。主材與輔材、輔材之間都采用螺栓直接連接或者通過(guò)節(jié)點(diǎn)板連接而成。
沿著角鋼棱線攀爬時(shí),機(jī)器人運(yùn)動(dòng)過(guò)程中重心落在角鋼上,運(yùn)動(dòng)較穩(wěn)定,因此,選擇棱線進(jìn)行攀爬。如圖1所示,電力鐵塔的一條主材上設(shè)有腳釘供電力工人攀爬,腳釘在角鋼兩側(cè)交替且均勻分布,腳釘伸出的長(zhǎng)度遠(yuǎn)大于障礙物高度,以腳釘作為夾持對(duì)象,將大大簡(jiǎn)化機(jī)器人結(jié)構(gòu),解決越障難題。

圖1 電力鐵塔Fig.1 Electric Power Tower
綜上,這里以主材角鋼為攀爬對(duì)象,以主材角鋼上的腳釘為夾持對(duì)象,沿角鋼棱線攀爬。
3 攀爬機(jī)器人的機(jī)械結(jié)構(gòu)設(shè)計(jì)
這里參考尺蠖攀爬步態(tài)設(shè)計(jì)了機(jī)器人主體,創(chuàng)新性地以鐵塔角鋼上的腳釘為夾持對(duì)象,設(shè)計(jì)了機(jī)械電磁復(fù)合手爪。
3.1 主體機(jī)械結(jié)構(gòu)設(shè)計(jì)
攀爬機(jī)器人主體,如圖2所示。包括前腕關(guān)節(jié)、中間關(guān)節(jié)、后腕關(guān)節(jié)三個(gè)轉(zhuǎn)動(dòng)關(guān)節(jié),依照關(guān)節(jié)將其分為前手爪、前臂、后臂、后手爪。前臂裝有攝像頭用來(lái)觀察工作環(huán)境并將其傳輸至地面,后臂上的電池可以為機(jī)器人提供電能,實(shí)現(xiàn)機(jī)器人離地工作。

圖2 攀爬機(jī)器人模型Fig.2 Model of Climbing Robot
如圖3所示,前、后腕關(guān)節(jié)分別由單獨(dú)的電機(jī)直接驅(qū)動(dòng),調(diào)節(jié)前、后手爪的俯仰角度。中間關(guān)節(jié)的運(yùn)動(dòng)由安裝在后臂內(nèi)部的電機(jī)驅(qū)動(dòng),電機(jī)通過(guò)齒輪帶動(dòng)絲桿轉(zhuǎn)動(dòng),螺母沿著絲桿上下移動(dòng),中間關(guān)節(jié)驅(qū)動(dòng)桿位置的變化可以改變兩臂的夾角,即利用電機(jī)的正反轉(zhuǎn)調(diào)節(jié)中間關(guān)節(jié)的角度大小。

圖3 攀爬機(jī)器人內(nèi)部結(jié)構(gòu)Fig.3 Internal Structure of Climbing Robot
3.2 機(jī)械電磁復(fù)合手爪的設(shè)計(jì)
現(xiàn)階段靜態(tài)定位主要分為機(jī)械夾持和磁吸附兩種方式,機(jī)械夾持穩(wěn)定性好,但結(jié)構(gòu)復(fù)雜,電磁鐵吸附結(jié)構(gòu)簡(jiǎn)單,但夾持不穩(wěn)定。綜合兩者的優(yōu)點(diǎn),這里設(shè)計(jì)了一種機(jī)械電磁復(fù)合手爪。
手爪主要包括糾偏裝置、足架、電磁鐵和機(jī)械爪,結(jié)構(gòu)如圖4所示。足架一端與機(jī)器人的前后臂相連,另一端連接電磁鐵和機(jī)械爪。手爪前端的糾偏裝置呈90°,可與角鋼兩側(cè)面完全貼合起到導(dǎo)向作用,當(dāng)手爪輕微偏離角鋼棱線時(shí),也可起到糾偏作用。電磁鐵選用條形電磁鐵,兩電磁鐵呈90°且與角鋼兩側(cè)面貼合。手爪兩側(cè)各有一個(gè)機(jī)械爪,左右完全對(duì)稱。因?yàn)橹鞑慕卿撋系哪_釘左右交替分布,對(duì)稱設(shè)計(jì)可保證必有一側(cè)的機(jī)械爪夾持在腳釘上,同電磁鐵與角鋼的兩個(gè)接觸點(diǎn)共同構(gòu)成一個(gè)三角形,保證了夾持的可靠性。手爪夾持狀態(tài),如圖5所示。

圖4 機(jī)械電磁復(fù)合手爪Fig.4 Mechanism-electromagnetism-combined Gripper

圖5 手爪夾持狀態(tài)Fig.5 Clamping State of Gripper
機(jī)械爪由齒條、齒條外殼、夾爪、連桿和定位桿組成,采用對(duì)稱設(shè)計(jì),如圖6(a)所示。機(jī)械爪的開合由齒輪齒條機(jī)構(gòu)實(shí)現(xiàn),安裝在足架上的電機(jī)帶動(dòng)齒輪轉(zhuǎn)動(dòng),齒輪帶動(dòng)兩個(gè)齒條同時(shí)向外移動(dòng),夾爪張開松開腳釘,反之則夾爪閉合夾住腳釘:連桿和定位桿的主要作用是對(duì)腳釘進(jìn)行定位,定位桿一端與夾爪鉸接,另一端與連桿通過(guò)銷連接,連桿另一端與齒條外殼鉸接,銷能在定位孔中自由滑動(dòng)。如圖6(b)所示,夾爪閉合過(guò)程中,銷沿定位孔向外滑動(dòng),帶動(dòng)定位桿向內(nèi)閉合,夾爪夾住腳釘時(shí),定位桿的圓弧狀末端剛好與腳釘完全貼合并將其定位。
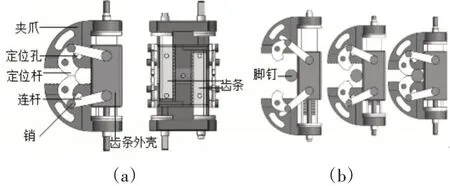
圖6 手爪上的機(jī)械爪Fig.6 The Clamper on the Gripper
3.3 關(guān)鍵受力部件有限元分析
為了保證機(jī)器人安全可靠地工作,對(duì)足架和中間關(guān)節(jié)驅(qū)動(dòng)桿兩個(gè)關(guān)鍵受力部件利用Workbench進(jìn)行有限元分析。兩個(gè)部件均采用6061鋁合金,取安全系數(shù)為2,則許用應(yīng)力為27.6MPa。網(wǎng)格劃分采用四面體法并指定網(wǎng)格大小為1mm。
足架:在足架與機(jī)械爪的接觸面添加固定約束,在足架與臂連接的孔內(nèi)施加重力載荷。如圖7所示,足架最大形變量為0.009mm,最大應(yīng)力4.814MPa<27.6MPa,滿足強(qiáng)度要求。

圖7 足架位移云圖及應(yīng)力云圖Fig.7 Deformation and Stress Figure of Gripper Frame
中間關(guān)節(jié)驅(qū)動(dòng)桿:在驅(qū)動(dòng)桿下端孔添加固約束,在上端的孔內(nèi)施加重力載荷。如圖8所示,最大形變量為0.550mm,可以安全工作:最大應(yīng)力19.433MPa<27.6MPa,滿足強(qiáng)度要求。

圖8 中間關(guān)節(jié)驅(qū)動(dòng)桿位移云圖及應(yīng)力云圖Fig.8 Deformation and Stress Figure of Connecting Rod
根據(jù)有限元分析結(jié)果,可以看出機(jī)器人的機(jī)械結(jié)構(gòu)設(shè)計(jì)滿足強(qiáng)度要求,可以安全工作,設(shè)計(jì)合理。
4 機(jī)器人攀爬步態(tài)分析
攀爬機(jī)器人的首要任務(wù)就是攀爬電力鐵塔,以腳釘為攀爬對(duì)象可以避開螺栓區(qū)、節(jié)點(diǎn)板等障礙物,故只需考慮攀爬步態(tài)。機(jī)器人需要調(diào)整前腕關(guān)節(jié)、中間關(guān)節(jié)、后腕關(guān)節(jié)三者協(xié)調(diào)運(yùn)動(dòng)才能實(shí)現(xiàn)機(jī)器人的攀爬功能,因此有必要對(duì)機(jī)器人的攀爬運(yùn)動(dòng)進(jìn)行運(yùn)動(dòng)學(xué)建模,并且進(jìn)行相應(yīng)的運(yùn)動(dòng)學(xué)分析與仿真。
4.1 攀爬步態(tài)設(shè)計(jì)
攀爬步態(tài)的設(shè)計(jì)是機(jī)器人運(yùn)動(dòng)學(xué)分析的基礎(chǔ),機(jī)器人攀爬步態(tài)如圖9所示。

圖9 機(jī)器人攀爬步態(tài)示意圖Fig.9 Climbing Gait of Climbing Robot
Step1:機(jī)器人前后手爪電磁鐵通電,機(jī)械爪閉合,前手爪緊緊夾持在2號(hào)腳釘上,后手爪夾持在1號(hào)腳釘上;
Step2:后手爪夾持狀態(tài)不變,前手爪電磁鐵斷電且機(jī)械爪張開,前、后腕關(guān)節(jié)以及中間關(guān)節(jié)協(xié)調(diào)配合運(yùn)動(dòng),使得前手爪松開2號(hào)腳釘,離開電力鐵塔并向上邁動(dòng);
Step3:前手爪夾持到3號(hào)腳釘上,前手爪電磁鐵通電且機(jī)械爪閉合,此時(shí),機(jī)器人前后手爪緊緊夾持在腳釘上;
Step4:前手爪夾持狀態(tài)不變,后手爪電磁鐵斷電且機(jī)械爪張開,前、后腕關(guān)節(jié)以及中間關(guān)節(jié)協(xié)調(diào)配合運(yùn)動(dòng),使得后手爪松開1號(hào)腳釘,離開電力鐵塔并向上邁動(dòng);
Step5:后手爪夾持到2號(hào)腳釘上,后手爪電磁鐵通電且機(jī)械爪閉合,此時(shí),機(jī)器人前后手爪緊緊夾持在腳釘上;
至此,機(jī)器人完成了一個(gè)攀爬步驟,以此循環(huán)。
4.2 攀爬運(yùn)動(dòng)學(xué)模型的建立
攀爬過(guò)程中,典型姿態(tài)為后手爪夾持在角鋼上,前手爪騰空,以機(jī)器人后腕關(guān)節(jié)為基坐標(biāo)系進(jìn)行D-H建模[8]。這里采用改進(jìn)D-H參數(shù)法建立連桿坐標(biāo)系[9],如圖10所示。

圖10 攀爬機(jī)器人D-H模型Fig.10 D-H Model of Climbing Robot
通過(guò)建立連桿坐標(biāo)系得到D-H參數(shù)表,如表1所示。

表1 D-H參數(shù)表Tab.1 D-H Parameter Table
4.3 攀爬運(yùn)動(dòng)學(xué)分析
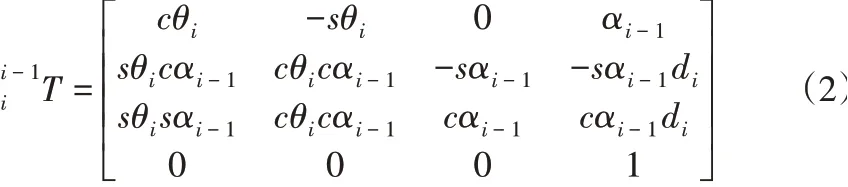
根據(jù)圖10連桿坐標(biāo)系建立連桿i對(duì)連桿i-1相對(duì)位置的齊次變換矩陣

展開,得
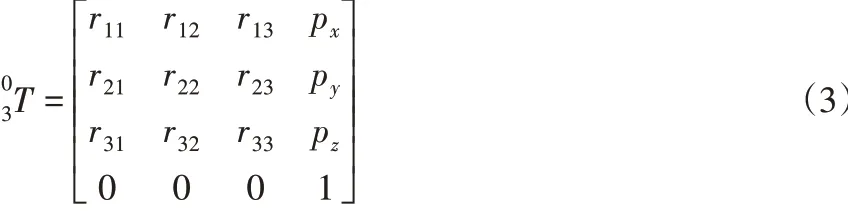
其中,

方程(3)構(gòu)成攀爬機(jī)器人的運(yùn)動(dòng)學(xué)方程。
4.4 攀爬運(yùn)動(dòng)學(xué)模型的驗(yàn)證
采用的驗(yàn)證方法為給定關(guān)節(jié)的變量值,代入運(yùn)動(dòng)學(xué)方程中求解相應(yīng)位姿坐標(biāo),再代入Robotics Toolbox求解相應(yīng)位姿坐標(biāo),若結(jié)果相等,則運(yùn)動(dòng)學(xué)模型正確,否則模型錯(cuò)誤。
對(duì)各關(guān)節(jié)變量賦值:θ1=π/3,θ2=-2π/3,θ3=-π/6,代入式(3)得出機(jī)器人前手爪相對(duì)于基坐標(biāo)系的位姿r11=0,r12=1,
在Robotics Toolbox中建立一個(gè)3自由度機(jī)械臂模型,命名為“攀爬機(jī)器人”。定義初始位姿為[π/3,-2π/3,-π/6],得到如圖11(a)所示的運(yùn)動(dòng)學(xué)模型。調(diào)用fkine()函數(shù)進(jìn)行正運(yùn)動(dòng)學(xué)分析,可得機(jī)器人前手爪相對(duì)于基坐標(biāo)系的位姿矩陣為:

圖11 攀爬機(jī)器人運(yùn)動(dòng)學(xué)仿真Fig.11 Kinematics Simulation of Climbing Robot

式(4)與運(yùn)動(dòng)學(xué)方程求得的解一致,故運(yùn)動(dòng)學(xué)模型正確。
4.5 攀爬運(yùn)動(dòng)學(xué)仿真
機(jī)器人初始位置的關(guān)節(jié)變量為[π/3,-2π/3,-π/6],終止位置關(guān)節(jié)變量為[π/6,-π/3,-π/3]。在Robotics Toolbox生成3個(gè)關(guān)節(jié)的位移、速度、加速度曲線[10],如圖11(b)、(c)、(d)所示。
可以看出:攀爬機(jī)器人在攀爬過(guò)程中各個(gè)關(guān)節(jié)運(yùn)行平穩(wěn),曲線平滑,不存在奇異點(diǎn)。而且,機(jī)器人各關(guān)節(jié)在攀爬過(guò)程中沒有剛性沖擊和柔性沖擊,滿足機(jī)器人的控制要求,設(shè)計(jì)合理。
5 結(jié)論
針對(duì)危險(xiǎn)系數(shù)高的電力鐵塔作業(yè),這里設(shè)計(jì)了一種新型電力鐵塔攀爬機(jī)器人并且分析了攀爬步態(tài)。創(chuàng)新性地將電力鐵塔角鋼上的腳釘作為夾持對(duì)象,采用機(jī)械電磁復(fù)合手爪,簡(jiǎn)化了機(jī)械結(jié)構(gòu)。然后通過(guò)Workbench對(duì)關(guān)鍵受力部件進(jìn)行有限元分析,利用MATLAB里的Robotics Toolbox驗(yàn)證了改進(jìn)D-H參數(shù)法所建攀爬運(yùn)動(dòng)學(xué)模型的正確性并且進(jìn)行了運(yùn)動(dòng)學(xué)仿真,結(jié)果證明了機(jī)器人機(jī)械結(jié)構(gòu)以及攀爬步態(tài)設(shè)計(jì)合理,為軌跡規(guī)劃和動(dòng)力學(xué)研究奠定了基礎(chǔ)。新型電力鐵塔攀爬機(jī)器人提高了夾持穩(wěn)定性,解決了避障難題,在攀爬過(guò)程中各個(gè)關(guān)節(jié)運(yùn)行平穩(wěn),無(wú)剛性沖擊和柔性沖擊。攀爬機(jī)器人可以保障電力工人的人身安全,提高電力檢測(cè)的效率,具有廣泛的應(yīng)用前景。
猜你喜歡
機(jī)械工程材料(2022年10期)2022-11-21 12:08:44
小學(xué)科學(xué)(學(xué)生版)(2021年9期)2021-11-02 05:26:46
電腦報(bào)(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電腦報(bào)(2019年40期)2019-09-10 07:22:44
建材發(fā)展導(dǎo)向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機(jī)械與施工機(jī)械化(2017年6期)2017-07-10 11:54:50
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
