地形勘探機器人設計
2021-10-25 12:56:58劉思敏李憲華汪璐璐從瑞青楊韜
科技信息·學術版 2021年19期
關鍵詞:設計
劉思敏 李憲華 汪璐璐 從瑞青 楊韜
摘要:針對復雜地形的勘察問題,結合仿生原理,本文設計了一種地形勘探機器人,用三維軟件進行了模型的建立,運用機器人運動學的基本知識進行了該機器人的運動學分析,最后給出了結論。
關鍵詞:地形勘探;仿生機器人;智能化;四足機器人
前言
中國科學技術大學成功研制出仿蜘蛛機器人,該機器人機械部分以蜘蛛為原型,在機械運動中實現自鎖,憑借其特殊結構使得一個電機能夠很好地控制多個自由度,進而在平地上能夠完成前進后退、轉彎等動作。
1 結構設計
本文運用仿生學原理,設計的地形勘探機器人三維模型如圖1所示:
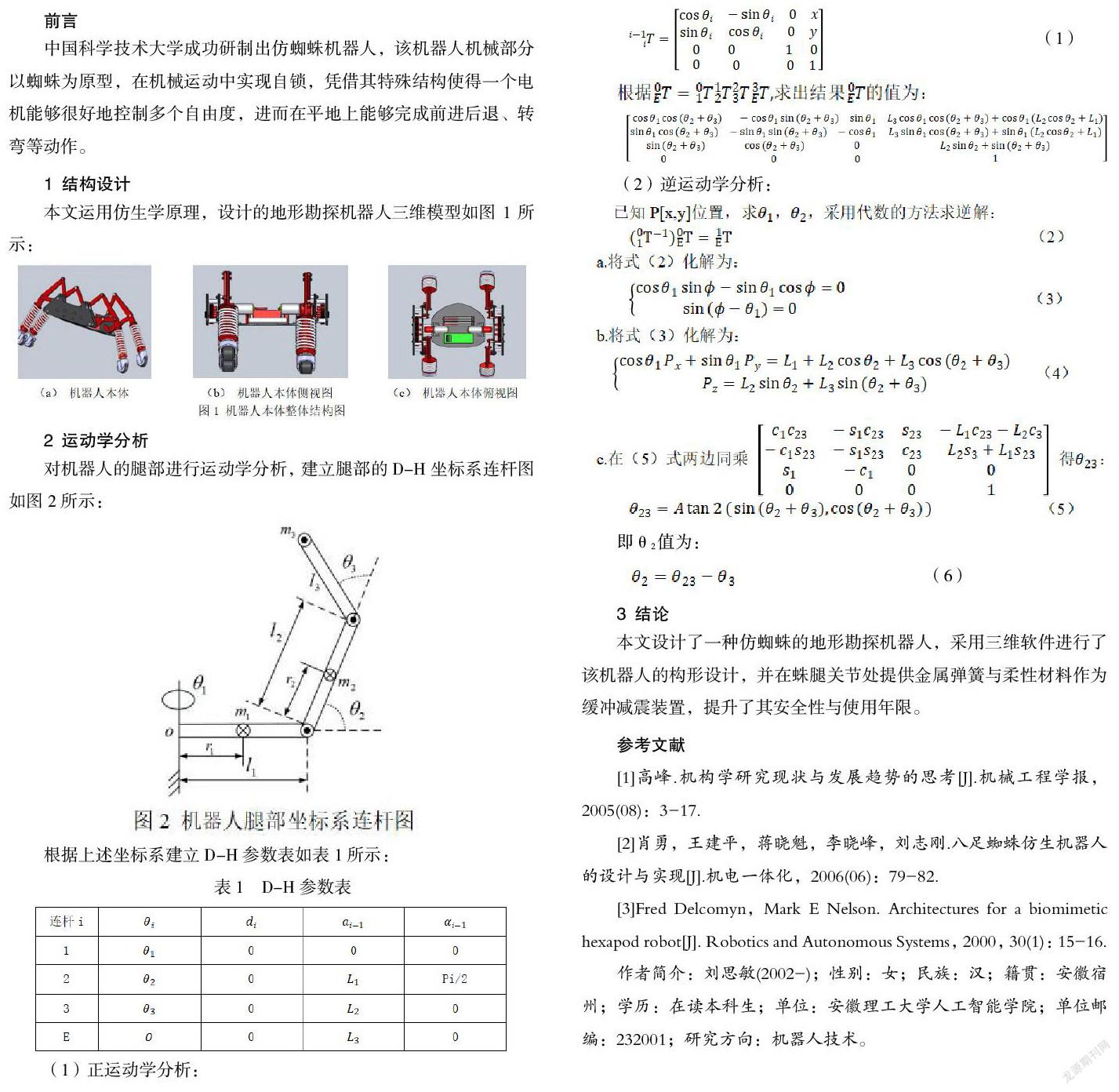
2 運動學分析
對機器人的腿部進行運動學分析,建立腿部的D-H坐標系連桿圖如圖2所示:
根據上述坐標系建立D-H參數表如表1所示:
3 結論
本文設計了一種仿蜘蛛的地形勘探機器人,采用三維軟件進行了該機器人的構形設計,并在蛛腿關節處提供金屬彈簧與柔性材料作為緩沖減震裝置,提升了其安全性與使用年限。
參考文獻
[1]高峰.機構學研究現狀與發展趨勢的思考[J].機械工程學報,2005(08):3-17.
[2]肖勇,王建平,蔣曉魁,李曉峰,劉志剛.八足蜘蛛仿生機器人的設計與實現[J].機電一體化,2006(06):79-82.
[3]Fred Delcomyn,Mark E Nelson. Architectures for a biomimetic hexapod robot[J]. Robotics and Autonomous Systems,2000,30(1):15-16.
作者簡介:劉思敏(2002-);性別:女;民族:漢;籍貫:安徽宿州;學歷:在讀本科生;單位:安徽理工大學人工智能學院;單位郵編:232001;研究方向:機器人技術。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
