水上清理工設計
2021-10-25 02:43:22徐洪波陳瑩王涌霖馮煥程
科技信息·學術版 2021年19期
徐洪波 陳瑩 王涌霖 馮煥程
摘要:隨著工業化、城市化加快,世界面臨著水資源短缺、污染嚴重的挑戰。而其中港口、湖泊、河流、海洋均受到不同程度的垃圾污染。機器控制方便、行動作靈活,可以實現復雜的空間軌跡控制,針對機器人的這種特性,我們生活中很多高難度繁重的工作都漸漸由機器人代替了。針對這一現象,設計了水上清理工,即水上垃圾收集船。水上清理工的垃圾清理主要是基于計算機視覺系統,STM32作為主要控制單元的控制系統,擁有太陽能充電系統。具有工作效率高、集裝置空間大、作噪音小、能環保等優點。
關鍵詞:垃圾;水上;收集船
1 引言
水是生命之源,生命搖籃。然而,水受到的污染正愈發嚴重,目前許多國家的河流、水域漂浮物污染十分嚴重,給人們的生存環境、投資環境和開發利用旅游資源等帶來負面影響。傳統的水面垃圾清理,主要是通過人為打撈,效率比較低,同時又消耗了大量的人力和財力,這些是僅靠人力是很難完成的。
水上清理工,即水上垃圾收集船的設計目的在于針對性的解決景區小面積水域以及不適合現有大型垃圾收集船工作的水面垃圾清理問題,代以往在這些水域使用的人工打撈方式。通過小型化設計和遙控器操縱實現簡便高效的清理工作。以抗風浪能力強的小水線面雙體船作為載體,電機驅動傳送網帶,網帶上的勾臂可以確實有效的打撈漂浮垃圾,垃圾最終落入收集箱。為使船上有限的空間能夠得到充分的利用,創新性的將機械伸縮機構應用在垃圾收集箱,使浸泡過水后有很強粘附性的輕薄垃圾,可以堆放到垃圾箱的底部,使垃圾箱逐步堆滿而不會局部堆積。
2 系統總體設計
水上清理工的控制部分主要由覺子系統(即機器人的眼睛)、決策子系統(即機器人的大腦)、執行子系統(即機器人的神經網絡)組成。通過視覺子系統把圖像信息傳給決策子系統,經決策子系統分析決策,把指令傳給執行子系統,由執行子系統控制各機械機構執行動作。
水上清理工船體選擇現今在船舶設計領域較為先進的小水線面雙體船型,可以在提供相同浮力的情況下獲得更大上層空間,且寬度比單體船大得多,其穩定性明顯優于單體船,同時具有承受較大風浪的能力,還具有良好的操縱性,還具有阻力峰不明顯、裝載量大等特點。在船體兩側上放置太陽能電池板,在安裝螺旋槳,而作業系統主要位于中間的船體,這樣的設計不僅外觀漂亮,而且結構合理,有利于船的平衡。船體采用工程塑料為外殼,外質較輕,質量較好,抗水面風險能力較強,并且可以減輕船體的重量,減輕船體的負擔,還可以提高船的情形速度,此外,工程材料價格較低廉,大大降低了船的成本。
太陽能電池板位于側邊的兩個船體表面,可以節約空間,利用電池板進行發電,電存儲在蓄電池中從而進行利用,為了防止太陽能電池的壽命,增強其防腐,防雨,防污等能力,其材料采用玻璃合金,密封在表面增加玻璃板,而背面增加合金薄片。
打撈機械裝置使用網狀傳送網帶與網狀勾臂,可以打撈絕大部分種類的水面垃圾,打撈過程中就可以過濾水份,減少船載質量,從而減少航行阻力。
水上清理工主控采用ST公司研制的STM32F1系列單片機,船身采用電機帶動槳葉作為的動力輸出和四軸上的舵機作為動力輸出的輔助裝置。輔助其實現更好、更靈活的運動模式。
水上清理工船身內安裝兩個步進電機,一個用來推進船體前進,通過步進電機的轉動來帶動螺旋槳的轉動,給船提供前進的動力;另一個電機控制控制螺旋槳的轉向,讓船體實現轉彎。步進電機在超載的情況下,電機的轉速和所停的位置取決于脈沖信號的頻率和脈沖數,它的旋轉以固定角度進行,可以通過控制脈沖個數來控制角位移量,從而達到準確的目的,這樣就可以通過控制步進電機來控制船體所停位置。
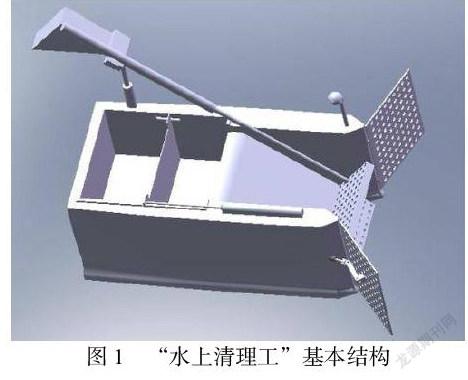
“水上清理工”基本結構如圖1所示。
3 系統硬件結構
3.1 管理員模塊:船體內設有報警功能,當設備出現問題時,可以給管理人員發出報警信號,這樣可以在第一時間內將信息傳達給管理人員,減少了等待的時間消耗,也防止問題因擴大化而產生的不必要的影響,同時管理人員可以遠程監視設備的運行情況,遠程視頻監控,知道水上清潔工的具體位置。
3.2控制單元:當攝像頭拍攝到垃圾時,將畫面傳送到相連的計算機或手機上,便可以手柄直接控制或者計算機通過藍牙控制船行進到垃圾周圍停止,遠程控制船上的打撈機械裝置垃圾收集行動,將垃圾收集上后放置在船身后方的收集裝置中。收集裝置滿后,控制裝置回到岸邊,將收集的垃圾清理,即完成操作。船亦可自動運行,在水面尋找垃圾并自動處理,當電量不足時會發出警報信號。
3.3主控單元:水上清理工以STM32單片機為核心,它是一款高性能、低成本、低耗能的嵌入式控制系統,內核采用的是ARM32位Cortex-M3CPU,最高頻率可以達到72 MHz,存儲器采用6-64 k B的SRAM存儲器,具有3個12位μs級的A/D轉換器,最多高達112位的快速I/O端口,是集藍牙控制和無線控制于一體的單片機控制系統。
3.4視覺系統:視覺系統是由海康威視ICS-IOT-TJ型號的視覺工業攝像頭和控制器組成,通過視覺攝像頭拍攝到存取碼,識別后通過信息處理成為 ASCII碼,再通過 RS232通信口進行視覺傳感器和 計算機之間的通信,將 ASCII碼傳輸給計算機,由 RS指令進行通訊。
3.5動力系統:為了實現環保、節能、高效的水上垃圾清理裝置設計,水上清潔工采用磷酸鐵鋰電池作為動力源,同時配置光伏電池板收集太陽能。鋰電池具有以下功能:
(1) 為船體的電機提供動力,能夠實現船體在水上的前進及轉向
(2) 為打撈機械裝置收集垃圾提供動力。
利用太陽能電池板轉化成電能存儲蓄電池,提供電能,讓電動機轉動推力式采用雙螺旋槳推動獨立電機,分別位于船體兩級架的后部,這樣,控制就靈活,而且也有足夠的動力。
3.6垃圾清理系統:垃圾清理系統主要由打撈機械裝置和垃圾收集裝置組成。垃圾收集裝置采用硬塑料,在減輕質量的同時也防止腐蝕,機械裝置可各方位收集垃圾。
4 結論
此裝置為解決日益嚴重的水體固體垃圾而設計,水體垃圾的危害極大,清除垃圾刻不容緩,通過攝像頭確定哪里垃圾多變停在哪,停下后可以開展工作。該作品適用于景區小面積水域以及不適合現有大型垃圾收集船工作的水面垃圾清理問題,可打撈大部分水面漂浮垃圾,如樹葉,包裝物等基于無線電遙控技術操控簡單機動性,十分適用于公園或景區小面積水域內水面垃圾的清理工作。
參考文獻
[1]孫強,王莎莎,荊世翔,等. 基于光伏發電技術的水上清理機器人動力系統設計[J]. 微計算機信息,2018,000(014):122-123.
[2]李金方,司麗麗,楊慶文. 螺旋漸進式水上清潔機器人設計方案研究[J]. 現代制造技術與裝備,2009,000(003):13-15.
[3]陳玲. 無人駕駛技術在水面垃圾清理船上的應用分析[J]. 船舶物資與市場,2020(1):50-51.
[4]謝家興,邱冠武,陳武瑞,等. 基于景區湖泊污染的多功能水域清理船設計[J]. 環境工程學報,2014,8(006):2371-2375.
[5]胡壽松. 自動控制原理(第四版)[M]. 科學出版社,2001.
基金項目:國家級大學生創新創業訓練計劃項目“水上清理工”(項目號:202110066019)
