車輛主動(dòng)懸架系統(tǒng)LQR的多種群遺傳優(yōu)化算法*
2021-11-03 06:50:38王東云黃安穴平燕娜劉新玉
自動(dòng)化與信息工程 2021年5期
王東云 黃安穴,2 平燕娜 劉新玉
車輛主動(dòng)懸架系統(tǒng)LQR的多種群遺傳優(yōu)化算法*
王東云1黃安穴1,2平燕娜1劉新玉1
(1.黃淮學(xué)院智能制造學(xué)院,河南 駐馬店 463000 2.中原工學(xué)院電子信息學(xué)院,河南 鄭州 451191)
車輛主動(dòng)懸架系統(tǒng)的線性二次型調(diào)節(jié)器(LQR)因結(jié)構(gòu)簡(jiǎn)單、易于實(shí)現(xiàn)而得到廣泛應(yīng)用,但其目標(biāo)函數(shù)最優(yōu)參數(shù)確定的問(wèn)題還沒(méi)有公認(rèn)的解決方法。為此,利用遺傳算法的群體搜索特性,提出一種基于多種群遺傳算法的LQR參數(shù)優(yōu)化策略。仿真結(jié)果表明:與傳統(tǒng)遺傳算法優(yōu)化的LQR及無(wú)優(yōu)化LQR相比,多種群遺傳算法在懸架動(dòng)行程、輪胎動(dòng)位移和車身垂向加速度3個(gè)指標(biāo)的平均性能上,分別提高了2.26%和33.55%,增加汽車的運(yùn)行平順性、操縱穩(wěn)定性和乘坐舒適性。
車輛主動(dòng)懸架系統(tǒng);線性二次型調(diào)節(jié)器;多種群遺傳算法
0 引言
車輛懸架系統(tǒng)與汽車的運(yùn)行平順性、操縱穩(wěn)定性和乘坐舒適性相關(guān)[1]。根據(jù)懸架結(jié)構(gòu)形式可分為被動(dòng)、半主動(dòng)和主動(dòng)3種類型。目前已有研究證實(shí):在保證同樣車輪跳動(dòng)量的前提下,采用主動(dòng)懸架系統(tǒng)的車輛性能比被動(dòng)和半主動(dòng)懸架系統(tǒng)至多可提高20%[2-3]。這是因?yàn)橹鲃?dòng)懸架系統(tǒng)根據(jù)外部的行車環(huán)境和車身狀況,主動(dòng)產(chǎn)生所需的控制力并進(jìn)行調(diào)整。
懸架系統(tǒng)在理論上是一個(gè)受隨機(jī)路面激勵(lì)的非線性系統(tǒng)[4]。良好的控制策略是車輛主動(dòng)懸架系統(tǒng)獲得最優(yōu)性能的重要保證。目前,國(guó)內(nèi)外研究者提出的車輛主動(dòng)懸架系統(tǒng)的控制策略有最優(yōu)控制、魯棒控制、自適應(yīng)控制、模糊控制、H∞控制等[5-8]。其中,線性二次型調(diào)節(jié)器(linear quadratic regulator, LQR)因成本低廉、性能出眾、實(shí)現(xiàn)方法簡(jiǎn)單而得到廣泛應(yīng)用[9-10]。
一般采用懸架動(dòng)行程、輪胎動(dòng)位移和車身垂向加速度3個(gè)指標(biāo)的加權(quán)和作為車輛主動(dòng)懸架系統(tǒng)的LQR參數(shù)選擇的目標(biāo)函數(shù)[11]。目前,這3個(gè)指標(biāo)的加權(quán)系數(shù)主要憑設(shè)計(jì)者的經(jīng)驗(yàn)確定。盡管國(guó)內(nèi)外研究者提出一些不依賴于個(gè)人經(jīng)驗(yàn)的參數(shù)優(yōu)化算法[9],但結(jié)果并不令人滿意。
為此,利用經(jīng)典的1/4車主動(dòng)懸架模型,結(jié)合上述3個(gè)指標(biāo)構(gòu)建LQR參數(shù)優(yōu)化的目標(biāo)函數(shù),本文提出一種基于多種群遺傳算法的優(yōu)化策略。
1 車輛主動(dòng)懸架系統(tǒng)模型構(gòu)建
車輛主動(dòng)懸架系統(tǒng)的簡(jiǎn)化模型有1/4車模型、1/2車模型或整車模型。其中1/4車主動(dòng)懸架模型形式簡(jiǎn)單、易于實(shí)現(xiàn),本文選擇其作為簡(jiǎn)化模型,物理模型如圖1所示。
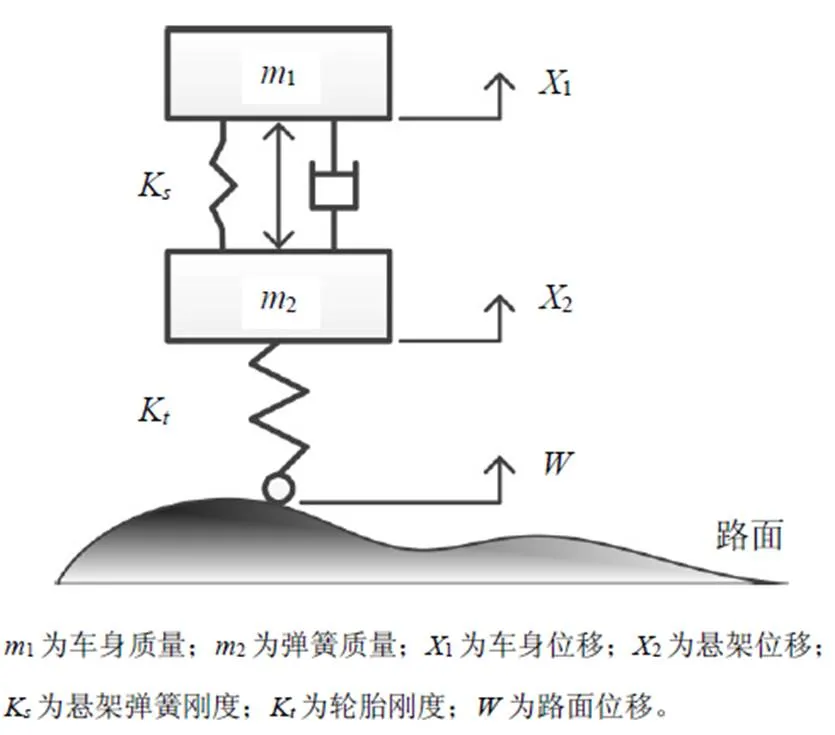
圖1 1/4車主動(dòng)懸架的簡(jiǎn)化物理模型
由圖1可知,1/4車主動(dòng)懸架簡(jiǎn)化物理模型可用一個(gè)二自由度的彈簧-阻尼-質(zhì)量系統(tǒng)進(jìn)行模擬[9]。
利用牛頓第二定律,1/4車主動(dòng)懸架系統(tǒng)的動(dòng)力學(xué)方程可表示為[9]
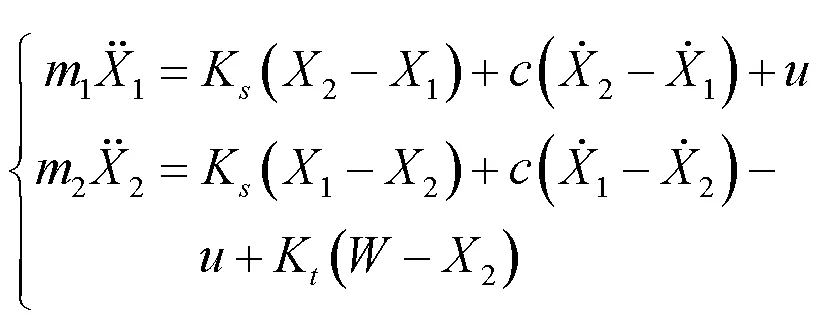
式中,為懸架阻尼系數(shù);為懸架動(dòng)力裝置施加的力,即主控制力。
2 車輛主動(dòng)懸架系統(tǒng)LQR優(yōu)化
2.1 LQR目標(biāo)函數(shù)
一般利用懸架動(dòng)行程表征汽車運(yùn)行平順性;輪胎動(dòng)位移表征汽車操縱穩(wěn)定性;車身垂向加速度表征乘坐舒適性。根據(jù)上述3個(gè)指標(biāo)可將控制的目標(biāo)函數(shù)表示為[9]


為獲得這3個(gè)指標(biāo)的最優(yōu)組合,根據(jù)LQR控制原理,將式(3)轉(zhuǎn)換為

LQR的最優(yōu)控制力為

LQR參數(shù)的確定取決于加權(quán)矩陣的選擇,而加權(quán)矩陣沒(méi)有固定的計(jì)算方法,往往基于使用者的個(gè)人經(jīng)驗(yàn),降低了獲得最優(yōu)解的概率。利用優(yōu)化算法獲得加權(quán)矩陣的最優(yōu)解是可行途徑之一。
2.2 LQR多種群遺傳算法
遺傳算法(genetic algorithm, GA)是一種具有群體搜索特性的全局優(yōu)化算法,其在迭代過(guò)程中采用交叉、變異等操作使種群朝最優(yōu)方向進(jìn)化,最終得到目標(biāo)函數(shù)的最優(yōu)解。GA直接以目標(biāo)函數(shù)值作為搜索目標(biāo),使用適應(yīng)度函數(shù)值來(lái)度量個(gè)體的優(yōu)良程度,不涉及目標(biāo)函數(shù)值的求導(dǎo)求微分過(guò)程,因此沒(méi)有應(yīng)用條件限制,擴(kuò)展了應(yīng)用范圍。但GA編碼時(shí)易出現(xiàn)不規(guī)范、不準(zhǔn)確等問(wèn)題,且容易過(guò)早收斂,進(jìn)入局部最優(yōu)。
為此,利用多種群GA算法(multiple population genetic algorithm, MPGA)對(duì)LQR進(jìn)行優(yōu)化。MPGA與傳統(tǒng)GA相比具有以下優(yōu)勢(shì):1)突破GA僅靠單個(gè)群體進(jìn)化的框架,引入多個(gè)種群同時(shí)優(yōu)化搜索,不同的種群賦以不同的控制參數(shù),實(shí)現(xiàn)不同的搜索目的;2)各個(gè)種群之間通過(guò)移民算子進(jìn)行數(shù)據(jù)交換,實(shí)現(xiàn)種群之間的協(xié)同進(jìn)化,最優(yōu)解則是種群之間協(xié)同進(jìn)化的綜合結(jié)果;3)通過(guò)人工選擇算子保存各種群進(jìn)化代中的最優(yōu)個(gè)體,并作為判斷算法收斂的依據(jù),避免傳統(tǒng)算法過(guò)早收斂的問(wèn)題。
MPGA具體步驟如下:
1)針對(duì)LQR的目標(biāo)函數(shù)產(chǎn)生3個(gè)初始種群,種群規(guī)模為100,迭代遺傳次數(shù)為20,交叉概率為0.4,變異概率為0.15,精英數(shù)目為10;
2)采用傳統(tǒng)GA流程把每個(gè)種群的每個(gè)個(gè)體的值依次賦值給1、2、3,計(jì)算主動(dòng)懸架的適應(yīng)度函數(shù)值;
3)在每個(gè)種群中選取一定數(shù)量的最優(yōu)個(gè)體組成精英種群,計(jì)算精英種群中各個(gè)個(gè)體的適應(yīng)度函數(shù)值,如果滿足遺傳算法的終止條件則退出迭代并輸出最優(yōu)個(gè)體,否則轉(zhuǎn)至步驟4);
4)依次對(duì)每個(gè)種群的個(gè)體進(jìn)行選擇、交叉和變異操作以產(chǎn)生新的種群,并轉(zhuǎn)至步驟2),再進(jìn)行循環(huán),直至獲得最優(yōu)加權(quán)系數(shù)組合。
2.3 優(yōu)化算法性能評(píng)估指標(biāo)
為有效評(píng)價(jià)MPGA的優(yōu)化性能,利用Matlab中的Simulink工具箱對(duì)LQR進(jìn)行建模,計(jì)算不同優(yōu)化算法獲得的懸架動(dòng)行程、輪胎動(dòng)位移和車身垂向加速度,并與傳統(tǒng)遺傳算法優(yōu)化的LQR及無(wú)優(yōu)化LQR相比,結(jié)果用均值±標(biāo)準(zhǔn)差的形式給出。
3 系統(tǒng)仿真與結(jié)果分析
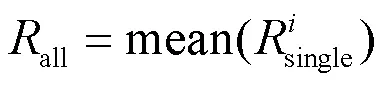
3.1 控制系統(tǒng)Simulink模型構(gòu)建
1/4車主動(dòng)懸架LQR的Simulink模型的實(shí)現(xiàn)如圖2所示。
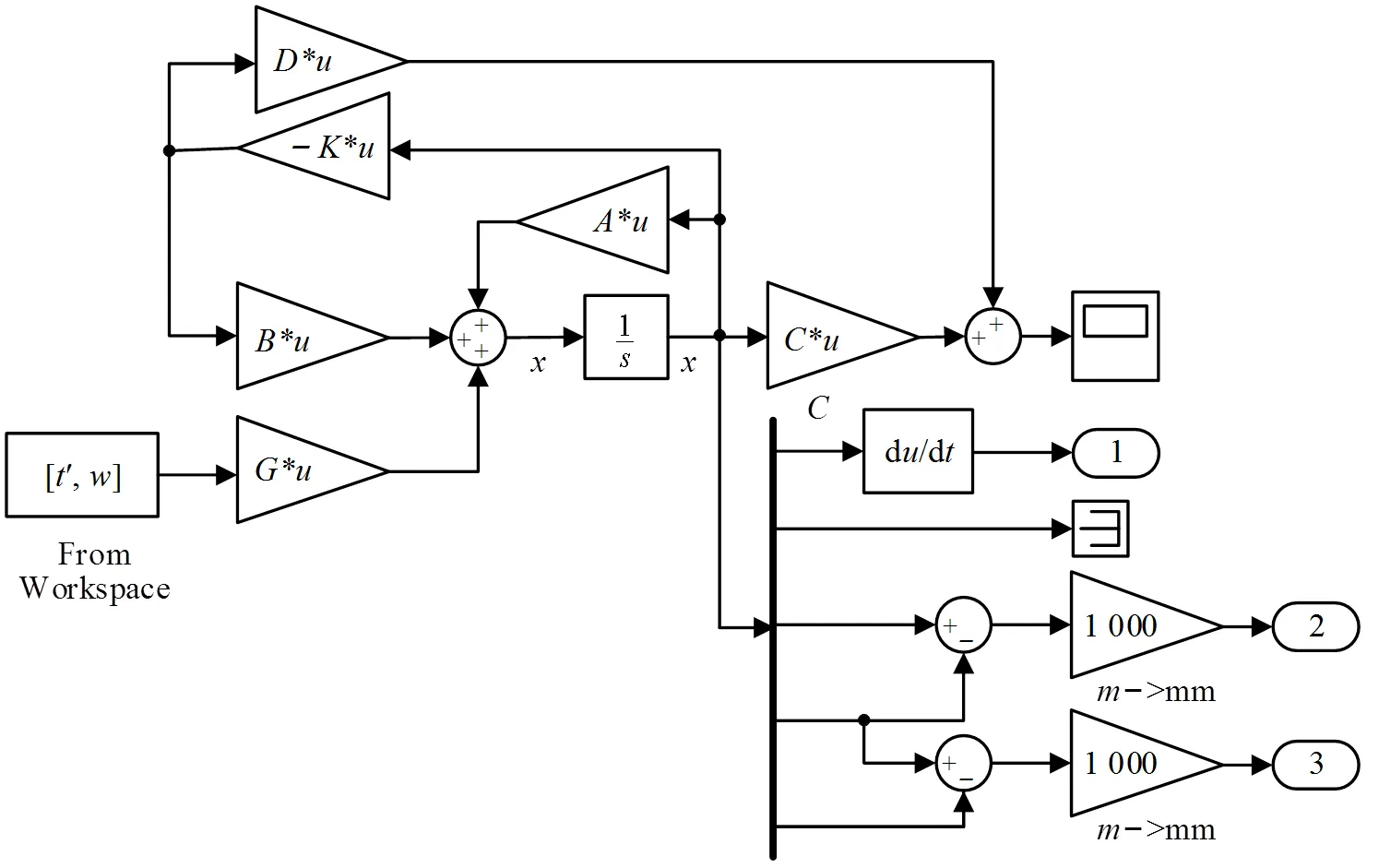
圖2 1/4車主動(dòng)懸架LQR的Simulink模型實(shí)現(xiàn)

3.2 不同算法控制性能對(duì)比
為驗(yàn)證MPGA的優(yōu)化性能,利用車身垂向加速度、懸架動(dòng)行程和輪胎動(dòng)位移3個(gè)指標(biāo)對(duì)比多種群遺傳算法的LQR(LQR_mpga)、傳統(tǒng)遺傳算法的LQR(LQR_ga)和無(wú)優(yōu)化LQR(LQR)的控制性能。這3個(gè)指標(biāo)值越小表示汽車的運(yùn)行性能越優(yōu)異。圖3給出了時(shí)長(zhǎng)為10 s的上述3個(gè)指標(biāo)的動(dòng)態(tài)變化曲線,其中下面小圖為上面圖形的其局部放大圖。由圖3可知,MPGA的優(yōu)化性能優(yōu)于GA和無(wú)優(yōu)化LQR。
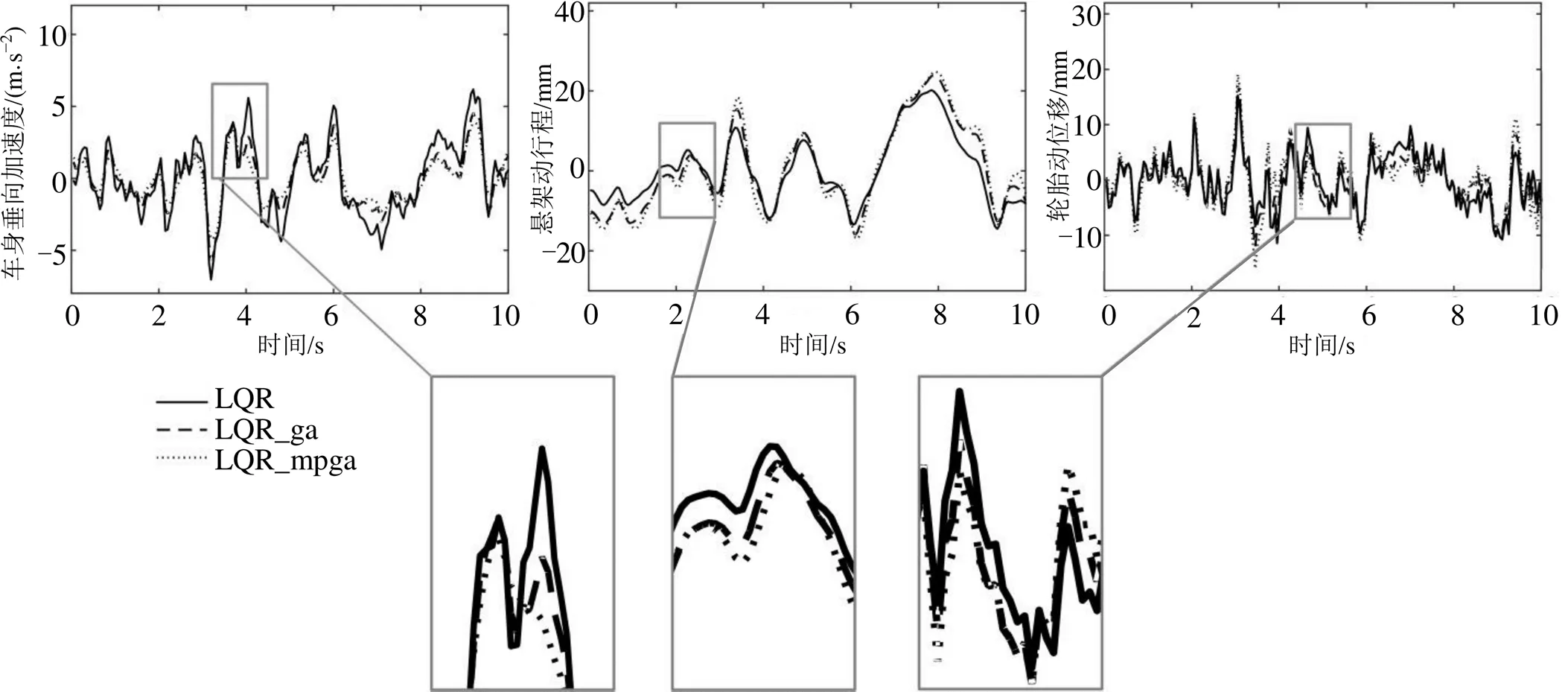
圖3 3種算法優(yōu)化性能對(duì)比
不同算法獲得的LQR參數(shù)的性能對(duì)比如表1所示。
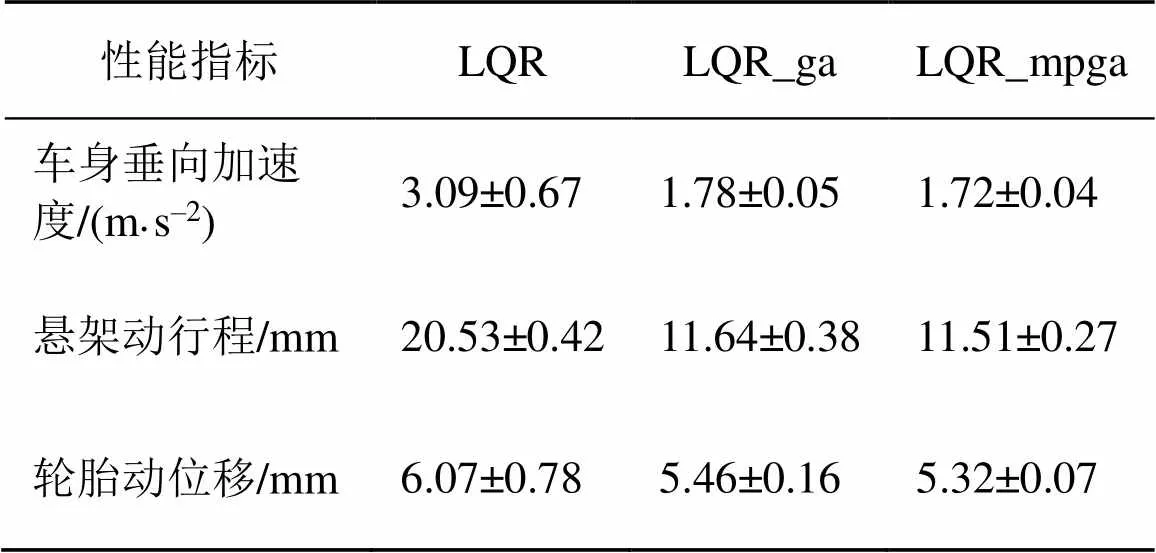
表1 不同算法獲得的LQR參數(shù)性能對(duì)比
由表1可知:MPGA的車身垂向加速度相比于傳統(tǒng)GA和無(wú)優(yōu)化LQR分別提高了3.37%和44.34%;懸架動(dòng)行程相比于傳統(tǒng)GA和無(wú)優(yōu)化LQR分別提高了1.12%和43.94%;輪胎動(dòng)位移相比于傳統(tǒng)GA和無(wú)優(yōu)化LQR分別提高了2.56%和12.36%;整體上,相比于傳統(tǒng)GA和無(wú)優(yōu)化LQR分別提高了2.26%和33.55%。
4 結(jié)論
本文針對(duì)車輛主動(dòng)懸架系統(tǒng)LQR優(yōu)化控制,構(gòu)建1/4車主動(dòng)懸架控制模型,建立LQR目標(biāo)函數(shù),并利用MPGA對(duì)其進(jìn)行優(yōu)化。仿真結(jié)果表明:MPGA具有更好的控制性能,車身垂向加速度、懸架動(dòng)行程和輪胎動(dòng)位移都有較明顯的減小,提高了汽車的運(yùn)行平順性、操縱穩(wěn)定性和乘坐舒適性。
[1] 來(lái)飛,胡博.汽車主動(dòng)懸架技術(shù)的研究現(xiàn)狀[J].南京理工大學(xué)學(xué)報(bào),2019,43(4):518-526.
[2] TSENG H E, HROVAT D. State of the art survey: active and semi-active suspension control[J].Vehicle System Dynamics, 2015,53(7):1034-1062.
[3] 趙旖旎,閻堃,葛栿松,等.車輛座椅減振系統(tǒng)的研究進(jìn)展[J]. 工程機(jī)械,2019,50(7):61-69,8.
[4] 王維強(qiáng),劉穎.車輛主動(dòng)懸架協(xié)調(diào)控制技術(shù)研究[J].機(jī)械設(shè)計(jì)與制造,2019(10):123-126.
[5] 李軍,方春杰.采用人群搜索算法的汽車半主動(dòng)懸架LQG控制[J].華僑大學(xué)學(xué)報(bào)(自然科學(xué)版),2017,38(4):446-451.
[6] 孟杰,陳慶樟,張凱.基于模擬退火算法的汽車懸架最優(yōu)控制研究[J].重慶交通大學(xué)學(xué)報(bào)(自然科學(xué)版),2013,32(3):497- 501.
[7] HAN Shiyuan, ZHONG Xiaofang, CHEN Yuehui, et al. Fuzzy guaranteed cost H∞control of uncertain nonlinear fuzzy vehicle active suspension with random actuator delay[J]. International Journal of Fuzzy Systems, 2019,21(7):2021-2031
[8] LONG Guimin, DING Fei, ZHANG Nong, et al. Regenerative active suspension system with residual energy for in-wheel motor driven electric vehicle[J]. Applied Energy, 2020,260: 114180.
[9] 劉曉培.基于遺傳算法的汽車行主動(dòng)懸架LQR控制器的優(yōu)化設(shè)計(jì)[J].組合機(jī)床與自動(dòng)化加工技術(shù),2013(6):78-80.
[10] 謝偉,趙波,蔣培露.基于遺傳算法的主動(dòng)懸架最優(yōu)控制研究[J].農(nóng)業(yè)裝備與車輛工程,2019,57(8):78-81.
[11] 李獻(xiàn),駱志偉.精通MATLAB/Simulink系統(tǒng)仿真[M].北京:清華大學(xué)出版社,2015.
[12] 李潔,劉耿碩.基于MATLAB的汽車懸架系統(tǒng)仿真研究[J].河北工程大學(xué)學(xué)報(bào)(自然科學(xué)版),2019,36(2):97-100.
Multi-population Genetic Optimization of LQR for Vehicle Active Suspension System
Wang Dongyun1Huang Anxue1,2Ping Yanna1Liu Xinyu1
(1.School of Intelligent Manufacturing, Huanghuai University, Zhumadian 463000, China 2. School of Electronic Information, Zhongyuan University of Technology, Zhengzhou 451191, China)
Linear quadratic optimal (LQR) control of vehicle active suspension system has been widely used because of its simple structure and easy realization, but there is no recognized solution to the problem of determining the optimal parameters of its objective function. Therefore, aiming at the problem of determining the optimal parameters of LQR controller for active suspension system, a LQR controller parameter optimization strategy based on multi population genetic algorithm is proposed by using the population search characteristics of genetic algorithm, in order to obtain the optimal values of parameters. The results show that, compared with the traditional genetic algorithm optimization and no optimization, the average performance of the multi population genetic algorithm is improved by 2.26% and 33.55% respectively in the three indexes of body vertical acceleration, suspension dynamic travel and tire dynamic displacement. The results show that the optimal parameters of LQR controller of active suspension system obtained by multi population genetic algorithm have positive significance for improving the ride comfort, handling stability and riding comfort of vehicles.
vehicle active suspension system; linear quadratic regulator; multi-population genetic algorithm
王東云,男,1964年生,博士,教授,主要研究方向:智能制造與控制。E-mail: wangdongyun@huanghuai.edu.cn
黃安穴,男,1992年生,碩士研究生,主要研究方向:智能制造與控制。
平燕娜,女,1986年生,碩士,講師,主要研究方向:自動(dòng)化。
劉新玉,男,1987年生,博士,講師,主要研究方向:智能腦機(jī)與人機(jī)系統(tǒng)。
基金項(xiàng)目:河南省駐馬店產(chǎn)業(yè)發(fā)展重大項(xiàng)目(2019ZDA01)
U461.4
A
1674-2605(2021)05-0003-05
10.3969/j.issn.1674-2605.2021.05.003
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
