一種新型海氣多參數測量浮標數據采集系統
2021-11-11 07:08:18孫寶楠梁冠輝丁軍航
海洋科學進展 2021年4期
關鍵詞:系統
王 斌,孫寶楠 ,梁冠輝,官 晟*,丁軍航
(1.青島大學 自動化學院,山東 青島 266071;2.自然資源部 第一海洋研究所,山東 青島 266061;3.青島海洋科學與技術試點國家實驗室 區域海洋動力學與數值模擬功能實驗室,山東 青島 266237;4.自然資源部 海洋環境科學與數值模擬重點實驗室,山東 青島 266061;5.山東省工業控制技術重點實驗室,山東 青島 266071)
海洋監測是海洋科學研究的重要組成部分。通過對海洋氣象和水文數據的監測,人們能夠及時地了解到海洋的環境變化,并為海洋科學研究、海洋災害預警和海洋資源開發提供實用資料。海洋觀測浮標作為廣泛應用于海洋監測的自主監測平臺,可通過錨定在海洋某一特定位置,利用其搭載的各種傳感器對海洋氣象水文諸多要素進行測量、處理、存儲和通信[1-2]。
海洋觀測浮標作為一種現代化海洋監測技術,正受到世界諸多國家的重視與研究。發達國家的海洋監測研究起步較早,開始于20世紀30年代末,并一直處于領先水平。最具代表性的是美國國家海洋和大氣管理局(National Oceanic and Atmospheric Administration,NOAA)研制的浮標,其終端設備技術先進,功能齊全,大部分都已經處于長期業務化運行階段,而且具有高觀測精度、長期穩定性、功能齊全和低功耗等特點[3]。海洋觀測浮標的觀測范圍已經擴展到深遠海,組成了業務化的觀測網,并且向著全球高密度布網發展[4];我國在20世紀60年代正式將海洋浮標納入國家發展規劃,之后也研制出了各種適用于不同海域的觀測浮標及其裝備,覆蓋了我國各海域。但就總體發展程度而言,目前我國海洋監測技術和網絡建設并不完善,在搭載的儀器設備的性能、測量精度和工作可靠性等方面,與國外還有較大的差距,這已成為制約我國海洋科技發展的重要因素之一[5]。
我國是一個海洋大國,發展海洋事業不僅對我國經濟、社會發展影響巨大,而且對國土安全和國家權益的保障具有極其重要的意義。近年來我國海洋監測技術不斷地發展,科技創新能力顯著提升,基本能夠滿足沿海海域業務化運行的需求。但是,隨著海洋環境監測要素的增多,數據處理復雜性加大,海洋監測系統也要應對越來越多的數據和復雜功能。因此,綜合各國海洋關注度的日益增加以及我國建設海洋強國戰略目標的實施,我們必須自主研發出具有穩定可靠、多參數、多功能的綜合海洋浮標數據采集監測系統。
本文的主要研究內容是設計一種新型海氣多參數測量浮標數據采集系統。通過構建數據采集系統,以獲取海洋環境監測數據,并利用衛星通信傳輸至地面接收端。除此之外,實現了系統的低功耗設計方案,并對系統進行相關聯調測試,以達到對海洋環境進行多參數長期監測的目的。
1 數據采集系統硬件設計
1.1 海洋資料浮標數據采集系統概述
數據采集是浮標系統的核心模塊,由搭載傳感器、電源系統、控制系統和通信系統組成,主要具有數據采集、處理、存儲、傳輸和過程控制等功能。浮標錨定于海洋中,通過太陽能供電,由數據采集系統根據系統工作時序,控制采集單元及各項傳感器的加斷電來采集傳感器的輸出信號,將其轉為數字信號并進行相關處理,之后,存入存儲單元并通過通信模塊與衛星進行實時傳輸,傳送給岸基接收中心進行后續的數據分析與處理[6]。系統組成框圖如圖1所示。
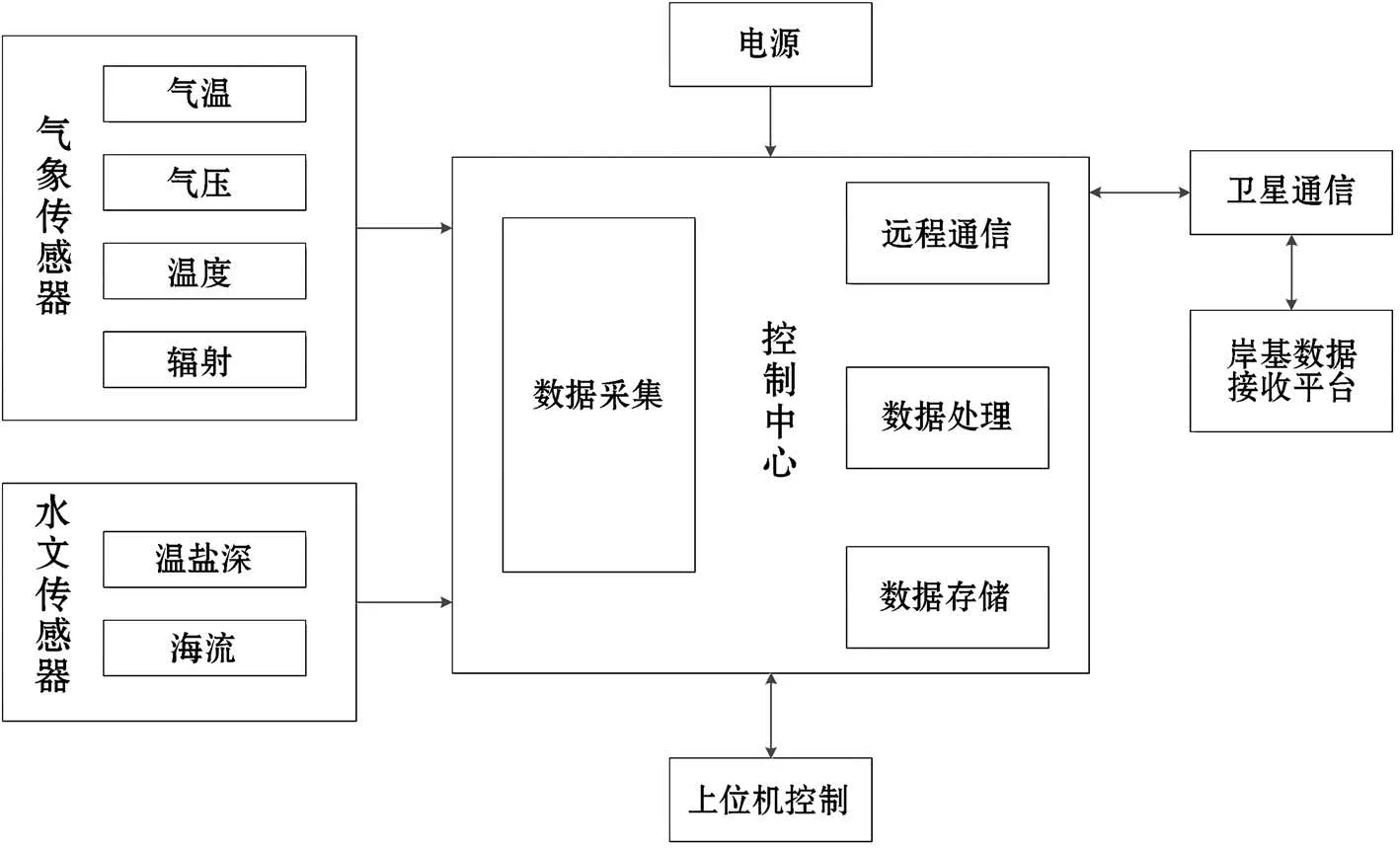
圖1 海洋資料浮標采集系統組成Fig.1 Composition of the acquisition system of marine buoy data
1.2 傳感器選型與安裝布放優化
若要實現數據采集系統,首先,需要了解需要采集的參數指標,根據參數選擇對應的傳感器種類以及傳感器接口;然后,根據傳感器的測量環境要求,為傳感器設置便于測量和安裝的布放位置;最后,利用數值模擬軟件對風力、水力等進行仿真計算,測試傳感器在惡劣環境干擾下是否能正常運作,若無法采集數據或數據異常,則對工作異常的傳感器進行硬件及安裝位置的分析,查找問題并進行安裝優化。浮標傳感器選型布放測試流程如圖2所示。

圖2 傳感器集成方案設計流程Fig.2 Flow chart of the design for sensor integration
觀測浮標采集的主要參數有氣溫、氣壓、濕度、風速、風向和輻射等氣象參數以及溫度、鹽度、深度和海流等水文參數。氣象傳感器采用鉑電阻RTD 進行氣溫的測量,其精度高且相對穩定,不會因高低溫引起物理或化學特性的變化;采用超聲風傳感器測量各個方向的風速分量,并通過合成得到風速風向,同時配合激光測風儀測量激光雷達垂向中軸線方向上不同高度的風速;氣壓采用硅諧振式氣壓傳感器測量,其不受被測流體密度的影響,通過固有振蕩頻率的變化來測得氣壓的大小;采用精度高、響應速度快的激光傳感器測量相對濕度,彌補了傳統濕度傳感器易受環境影響的缺陷;輻射測量方面采用速度快、檢測精準的熱電式太陽能輻射表,利用內置感光元件對太陽總輻射進行測量[7]。
水文傳感器選用定點式溫鹽深傳感器CTD測量水下溫度、電導率和壓力,通過計算得出剖面鹽度值,并用聲學海流計進行海流數據的測量。因水下數據傳輸距離較長,最深可到1 000 m,考慮到實時性、水密性以及價格因素,本文采用了感應耦合傳輸技術[8],通過包塑鋼纜進行數據傳輸,鋼纜一端裸露在海水中與海水形成閉合回路,水下傳感器獲得數據后,通過鋼纜回路產生的感應電流傳送至水上,并利用串口輸送給數據采集單元。
氣象傳感器由于數量較多,輸出信號類型和強度各不相同,采集單元處理起來較為不便,因此選擇一種通用的傳感器數據通訊接口,方便系統的集成。氣象傳感器統一選用標準RS485接口,組成RS485總線網絡進行數據傳輸。RS485總線是一種異步半雙工通訊方式,能進行多點數據的采集,相比RS232總線,其優點是采用平衡發送和差分接收、傳輸速率更快、抗干擾性更強、安裝方便、便于維護[9]。所選傳感器及相關參數如表1所示。
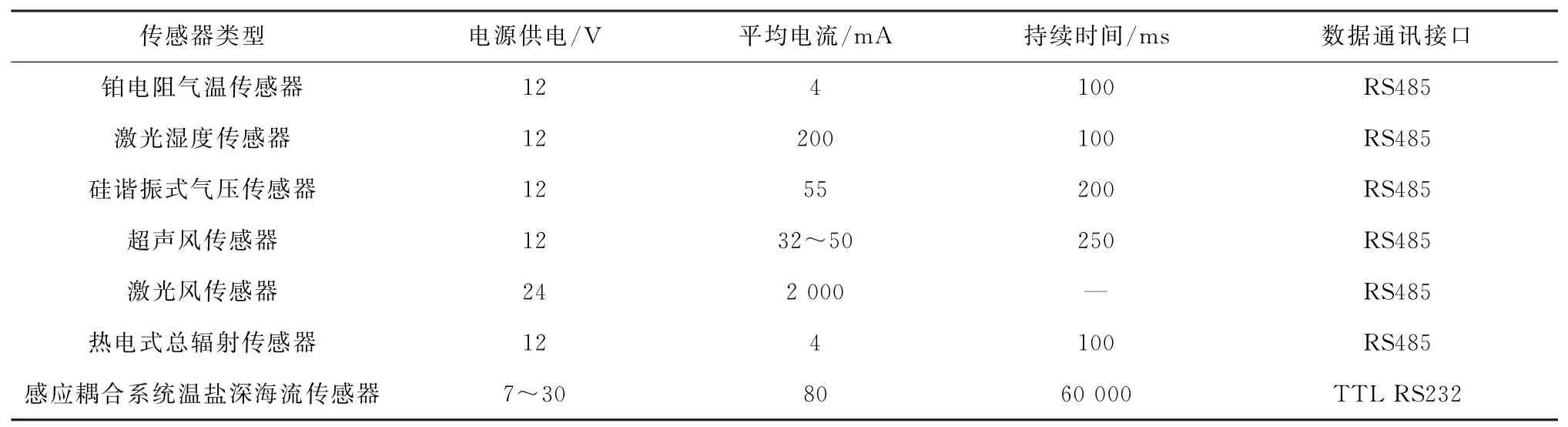
表1 浮標平臺傳感器電氣特性Table 1 Electrical characteristics of sensors
由于搭載的傳感器設備較多,浮標塔架平臺面積有限,設計塔架具有兩層安裝平臺(圖3),超聲測風、激光測風、太陽輻射需要防止遮擋,因此放置在第一層,其中激光測風需要一個廣闊的開角,因此將其置于中間位置,其他的分散在四周,以減小各個傳感器之間的相互影響,同時在第一層搭配避雷針和角反射器保證安全性;溫度、濕度傳感器等不怕遮擋的設備置于第二層。該安裝布放方法既能充分利用塔架空間,又能保證各個傳感器都具有安全和開闊的測量環境,極大地提高了采集系統的穩定性。
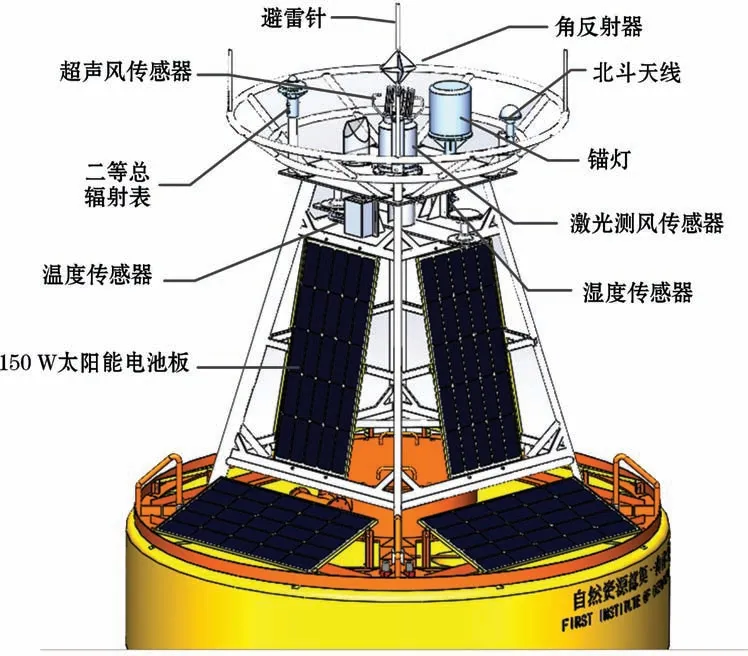
圖3 浮體塔架設備安裝布局Fig.3 Layout on buoy tower
1.3 遠程通信模塊選型安裝與通信流程
浮標傳感器所測得的所有數據都需要定時發送到岸站系統,這就需要專門的衛星通信系統對其進行數據傳輸。遠程通信系統通常采用GPRS、CD-MA 和北斗衛星等通信方式,將數據采集系統獲取的數據傳送至岸基接收站。
北斗衛星導航系統(BeiDou Navigation Satellite System,BDS)是我國自主研發的定位通訊系統,隨著北斗技術的不斷發展,衛星覆蓋海區逐漸擴大,天線結構安全可靠性增強,數據傳輸也更加安全穩定[10]。為支持國家北斗發展戰略,本文采用一套北斗通訊模塊,其具有標準的RS485數據接口,是采用模塊化一體式設計的,能夠滿足系統的數據傳輸要求。北斗通訊模塊安裝在浮標塔架立桿頂部,采用密封防水方式,通過RS485接口與數據采集單元進行傳輸。其中,北斗天線實物安裝照片如圖4所示。

圖4 北斗天線Fig.4 The Beidou antenna
海洋觀測浮標通過配置此套北斗天線將傳感器測量數據上傳至北斗衛星,北斗衛星將上傳的數據發送至岸基數據接收中心,由接收中心再將接收到的觀測數據進行進一步的顯示、處理和入庫,并通過以太網送入特定的計算機網絡[11-12]。系統通信平臺架構圖如圖5所示。
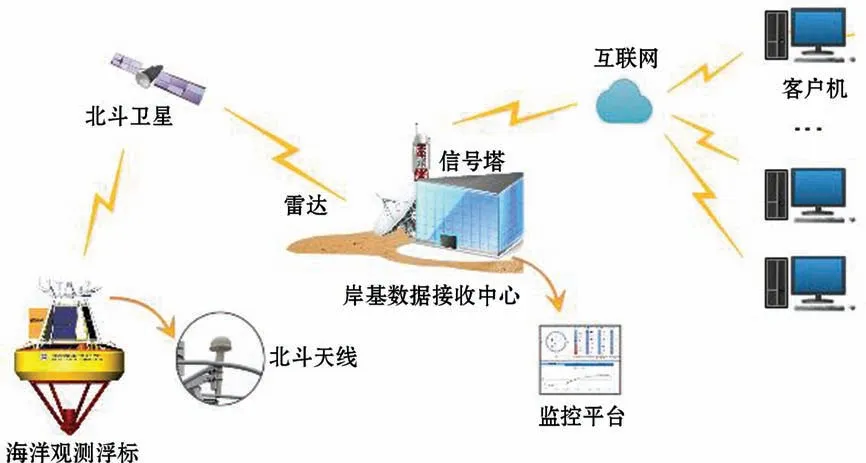
圖5 浮標遠程通信平臺架構Fig.5 Platform of the buoy telecommunication system
1.4 控制模塊處理器選型與功能設計
控制模塊是采集系統的大腦,在整個采集過程中起著至關重要的作用,其主要功能為:①根據相應時序和系統工作參數,對系統中的所有設備進行加斷電控制;②通過串口電路實現與搭載的串口接口的傳感器進行通信,定時采集傳感器數據;③在采樣過程結束后,將處理后的數據存入系統的存儲器;④與北斗通信單元通信,將數據按要求進行發送;⑤監測傳感器以及電源電壓,以監測系統工作狀態;⑥當浮標遭到破壞時及時報警等。
控制模塊需要有中央處理器CPU,其主要功能是負責處理和運算計算機內部的所有數據,是控制系統的核心。控制模塊原理圖與實物圖如圖6和圖7所示。本文按照模塊化、低功耗和高可靠的設計思想,綜合對比幾種常用處理器的技術特點,最終選用STM32F407RCT6作為控制模塊。STM32F407RCT6是一種嵌入式-微控制器的集成電路,它有著極高的性能、較低的功耗、合理的價格以及強大的軟件支持,簡單易用。其相關參數為:32位,速度72 MHz,程序存儲器容量256 k B,程序存儲器類型為FLASH,RAM 容量48 k B。該處理器接口數量滿足需求,同時也能保證系統所需的低功耗要求[13-14]。
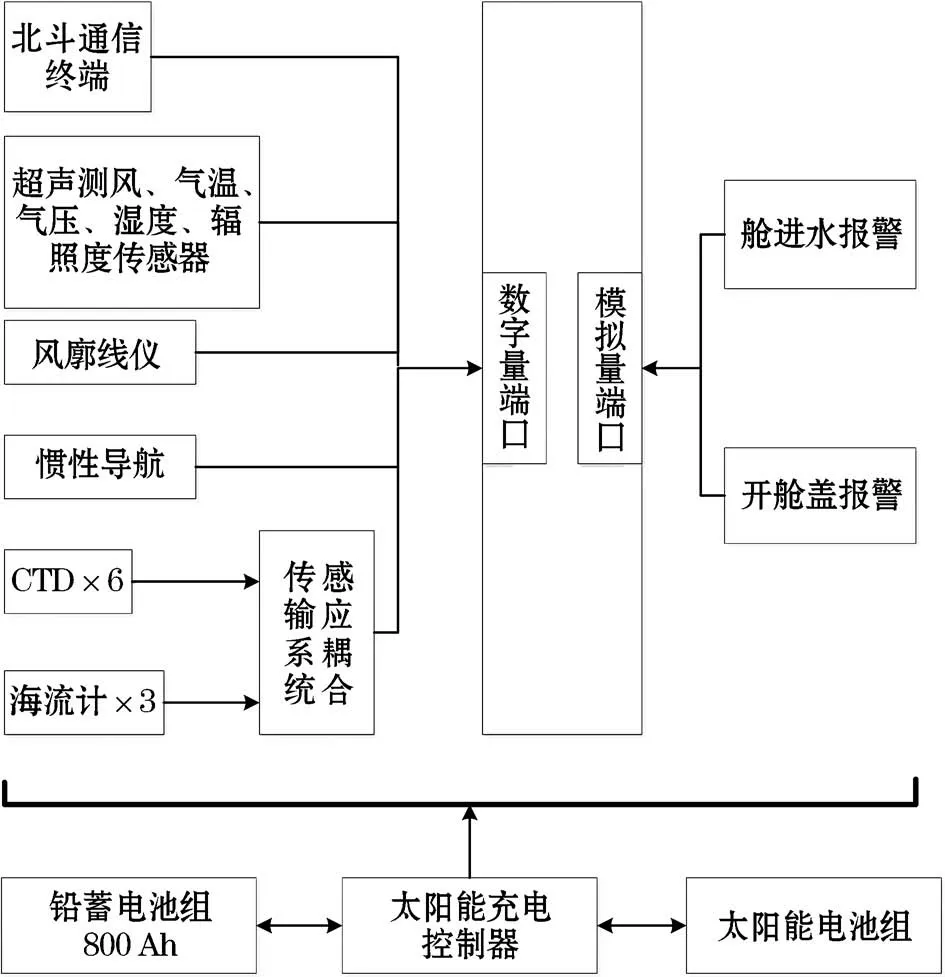
圖6 控制模塊原理Fig.6 Schematic diagram of the control module

圖7 控制模塊Fig.7 The control module
1.5 低功耗方案設計
浮標服役于海洋,工作周期長,電力補充能力較弱,因此數據采集控制系統的低功耗是系統的基本要求。根據本浮標實際工作需要,對本浮標系統做耗能假設:①正常工作模式下連續工作時間不小于1 a;②示范海域在南海北部,臺風天氣會出現連續降水天氣,必須滿足在連續15 d無法充電情況下提供設備正常工作電能;③各傳感器(除測風傳感器)每15 min采集一次數據,開機后連續采樣1 min;④激光測風雷達每15 min采集一次數據,開機后連續采樣5~10 min;⑤超聲測風傳感器,每15 min采集一次數據,開機后連續采樣10 min;⑥所有傳感器在風速大于20 m/s時做數據加密采集處理,連續采樣0.5 h;⑦衛星通訊模塊每小時開啟一次,持續傳輸數據15 min。
根據上述的耗能假設,本文采用如下低功耗方案:
①充分利用STM32F407RCT6提供的低功耗模式,在處理器完成主程序任務后,設置其進入低功耗待機模式。
②對電源進行有效管理,對于某時刻系統內暫不工作的部分,使其斷電或處于降耗狀態。如當采集數據時,只讓電源模塊和采集處理模塊工作,通信模塊暫不工作。在采集結束后,通信模塊再開啟,對數據進行傳輸。
③在滿足系統性能要求的基礎上,盡可能地選擇功耗較低的電子設備,降低功耗,延長電池工作時間。
本文所選設備以及功耗情況統計如表2所示。若要保證采集系統能在陰雨惡劣天氣無法充電的情況下連續15 d正常工作,根據設備總體功耗,采用8塊24V/125W 的太陽能電池板進行充電,采用4節250 Ah鉛酸電池儲能,其充放電性能穩定,價格較低,整體尺寸與重量相對較小,滿足系統的功耗要求[15-16]。
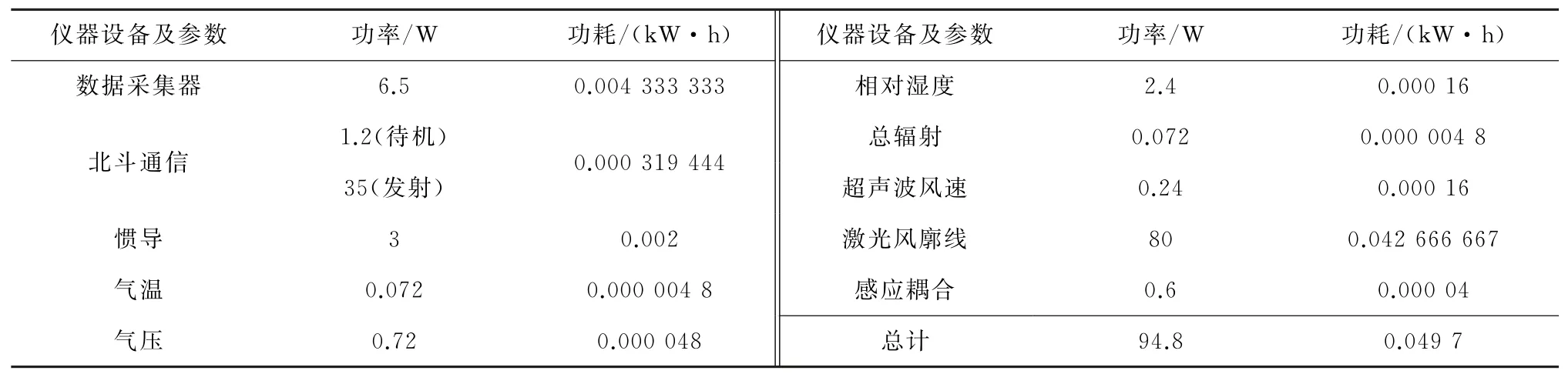
表2 儀器功率及功耗Table 2 Power and power consumption of instruments
2 數據采集系統軟件設計
軟件設計是浮標數據采集控制的重要內容,它控制著系統數據的采集過程、處理過程、發送過程和存儲過程等。本文軟件程序是基于Labview 圖形化編程語言在Windows XP Embedded系統進行開發的,該系統建立于Windows XP Professional的基礎之上,具有與之相同的應用程序編程模型,屬于精簡版的Windows XP系統,利于軟件快速開發;該系統還具有磁盤讀寫保護功能,可使浮標在長期海洋工作中突遇斷電時系統不會崩潰,隨后系統能夠自動重新開始觀測任務[17]。
2.1 數據采集控制程序設計
軟件的系統控制和數據采集流程如圖8所示。浮標既要高速地采集大量數據,又要對每次采集的數據進行操作,若將采集數據和操作數據放在同一循環周期內,會降低數據采集效率,甚至導致端口緩存區內的觀測數據可能未被及時讀取而被下一周期的觀測數據取代,進而造成數據缺失。為了避免以上情況發生,開發軟件時,采用了隊列操作模式,數據采集屬于入隊列循環,操作數據屬于出隊列循環,二者獨立運行互不影響。
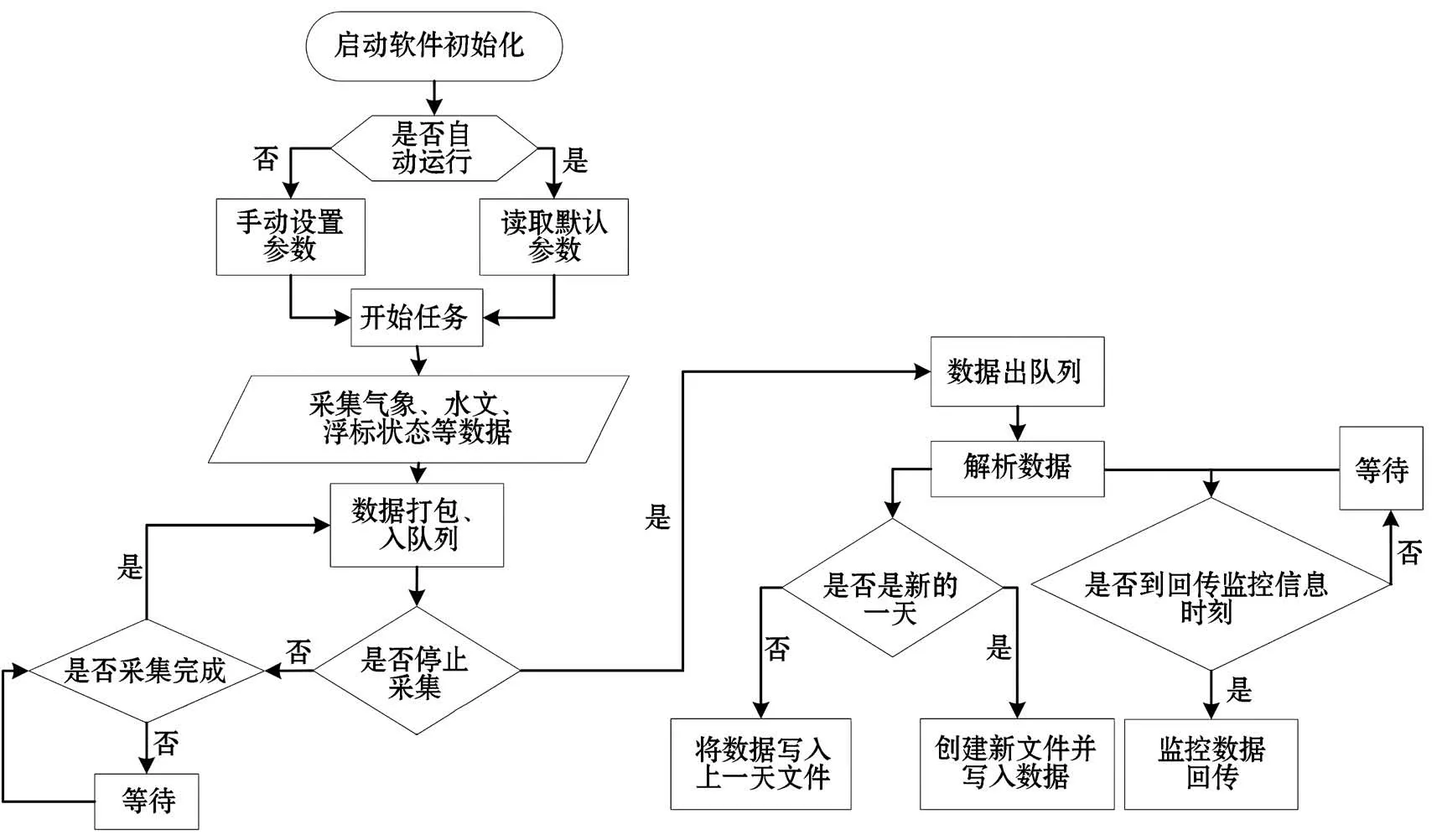
圖8 數據采集軟件流程Fig.8 Flow chart of the data acquisition software
觀測站軟件的主界面例如圖9所示。主界面包括控制參數設置窗口、狀態顯示窗口和錯誤監控窗口。通過控制參數設置窗口可對觀測站硬件工作參數進行設置,包括各模塊端口號、端口速率、采集模式、通信地址、通信頻率和數據文件路徑等;通過狀態顯示窗口可以查看各個模塊的工作狀態、數據采集器的運行狀態和通信狀態等;錯誤監控窗口的主要內容是顯示軟件各個子模塊的運行狀態。這些窗口可在調試系統時或者設備布放前進行系統設置、查看運行狀態,以保證研制工作和測量任務順利進行。該軟件界面簡潔易懂,操作方便,為用戶提供了便利。
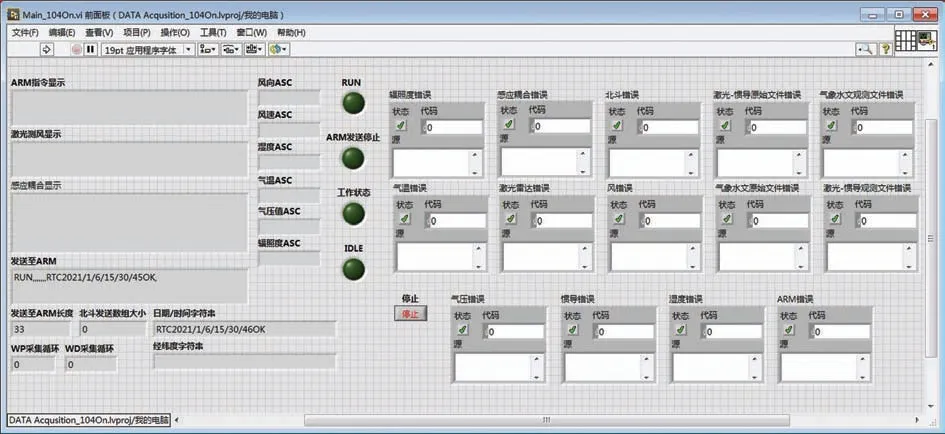
圖9 軟件主界面Fig.9 Main interface of the software
2.2 軟件時序及任務設計
根據不同的用戶需求,浮標可采用3 h、1 h、0.5 h和10 min工作模式,以常用的1 h工作模式為例,浮標數據采集控制系統工作時序如圖10所示。氣溫氣壓、風速風向、海流計、溫鹽等按照圖示進行定時上電、采集和斷電。
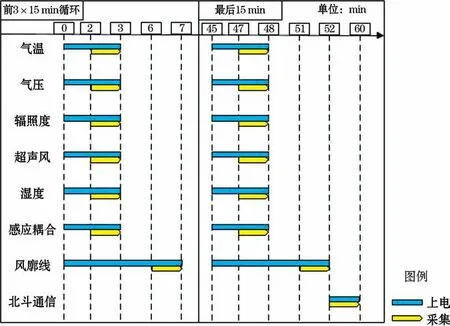
圖10 數據采集時序Fig.10 Sequence diagram of the data acquisition
3 數據采集系統實驗測試
根據系統時序,浮標數據采集軟件的任務組成主要包括風速風向采集任務、溫濕度采集任務、氣壓采集任務、海流采集任務、調試/顯示任務、衛星通信任務、網絡通信任務、文件操作任務和時間調度任務等。因采用了實時操作系統,做能保證各任務的實時性。
本文浮標海上示范運行擬選在某海域示范運行時間不少于1 a,以補充我國海上監測系統。在進行現場示范之前,需要先進行實驗室實驗,模擬現場環境,檢驗各部分設計制造的質量、電子部分的性能與參數以及軟件的性能等,盡可能地提前發現問題、解決問題。實驗測試總體流程如圖11所示。
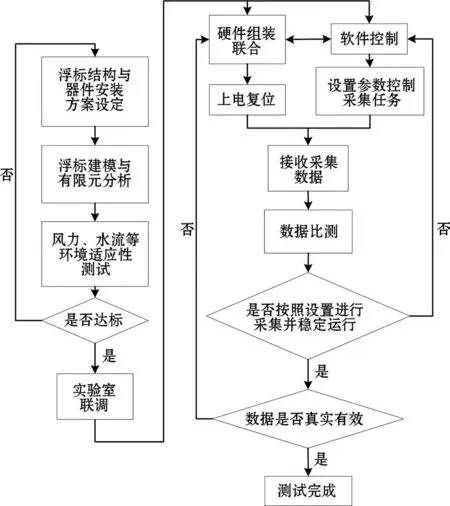
圖11 實驗測試流程[18]Fig.11 Flow chart of experimental test[18]
為保證浮標搭載器件安全穩定運行,浮標體自身需要有良好的漂浮穩定性,當遇到相對惡劣的風浪時,能避免出現較大的搖晃、旋轉。本文通過仿真計算浮標的靜穩性曲線和動穩性曲線來確定浮標的海上運動情況,2種曲線如圖12所示。
《國內航行海船法定檢驗技術規則》[19]中對于海洋浮體結構的大傾角穩性的要求為:橫傾角φ=30°處的復原力臂應不小于0.2 m,最大復原力臂對應的橫傾角應不小于25°,穩性消失角應不小于55°。從圖12a可以得出,該浮標的極限靜傾角約為41°,最大復原力臂約為0.58 m,穩性消失角超過90°,完全滿足技術要求。由圖12b可知,浮標的最小傾覆力臂為0.277 6 m。經過計算可得,文中浮標的風壓傾斜力臂為0.220 9 m,進而求得浮標的穩性衡準數K=1.26,這滿足《船舶與海上設施法定檢驗規則》[20]中要求浮體穩性衡準數大于等于1的要求。所以,該浮標完全滿足技術規則的要求,具備足夠的靜穩性與動穩性,即使在較為惡劣的海況下也能保持穩定姿態,確保了數據采集系統的各個器件能夠在安全穩定的環境下運行。
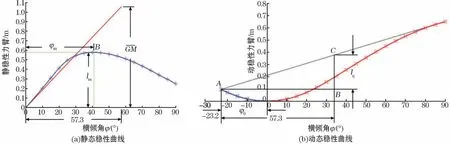
圖12 浮標穩性曲線[18]Fig.12 Buoy stability curve[18]
進一步對采集系統傳感器以及供電進行相關測試(表2)可知,在浮標搭載的各個器件中,激光測風儀功耗約占總功耗的85%,實驗中對激光測風儀進行功耗測試,連接一塊12 V 250 Ah蓄電池,用升壓模塊升至24 V 進行供電,實際測得穩定電流約為2.5 A,由電池的放電曲線可知,在電流小于0.05 C(7.5 A)時,可直接計算放電時長而不會達到電池欠壓值,因此通過計算得出一塊電池可供激光雷達持續運行約100 h。激光雷達與電源測試現場實物如圖13和圖14所示。

圖13 激光測風雷達Fig.13 Wind LIDAR

圖14 電源控制與升壓模塊Fig.14 Power supply and boost module
本系統使用8塊24 V/125 W 的太陽能電池板(圖15)對4塊蓄電池進行充電,為方便實驗,本文使用了兩塊電池板并聯,按照浮體安裝設計的角度置于陽關充足的地方,并對放電實驗中已放電的單塊電池進行充電,測得在光照充足時充電電流約為3 A。

圖15 太陽能電池板測試Fig.15 Solar panels test
激光雷達運行模式為每隔15 min啟動運行5~10 min。當出現陰雨天氣時,若電池中剩余電量按70%計算,則4 塊250 Ah電池能為激光雷達提供420~560 h的工作時間;其他器件雖工作時間與功耗各不相同,但總體占比較小,經過估算認為該系統能滿足在陰雨天氣下持續運行15 d的要求。
在進行電源供電實驗的同時,也為激光雷達數據采集做了測試,獲得垂直方向上1 000 m 以下的風速、風向相關數據,通過圖16所示軟件進行圖形化顯示,證明了采集模塊能正常運行并獲取到傳感器的測量數據。
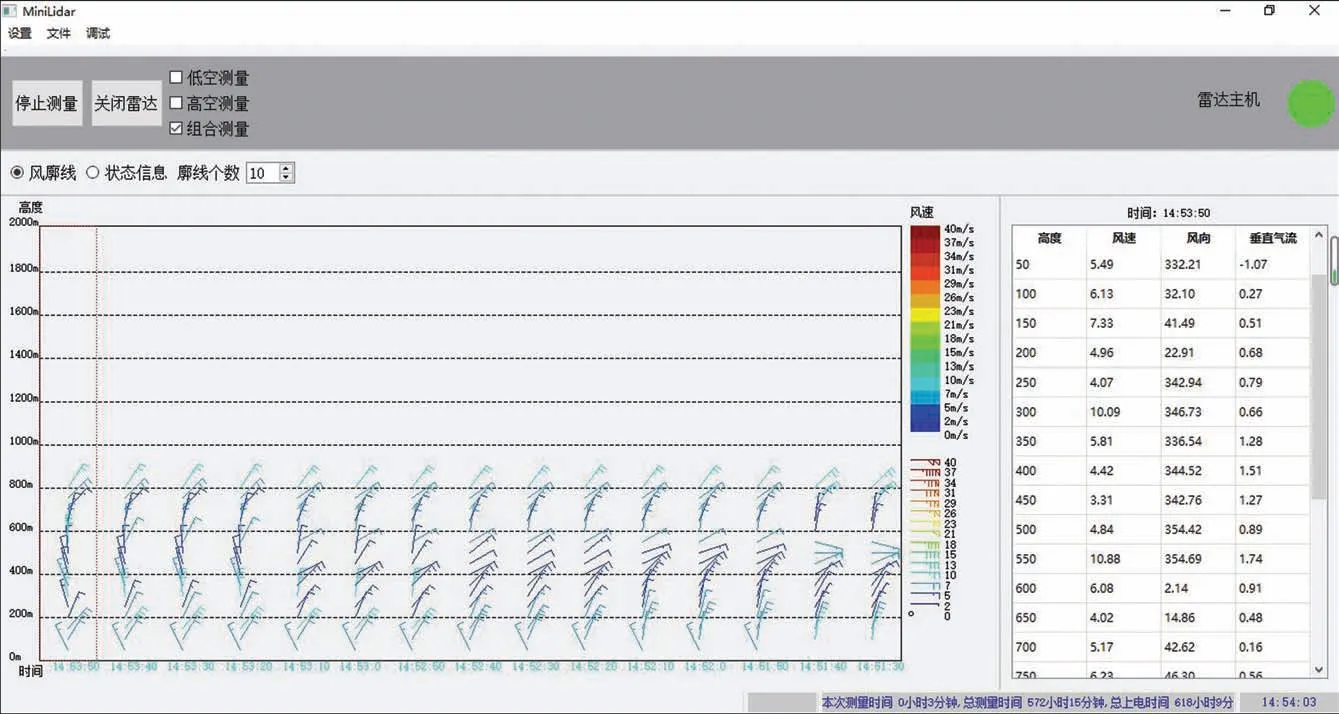
圖16 激光測風數據圖形化顯示Fig.16 Graphical display of wind measurement by LIDAR
4 結語
本文針對自主研制的新型海氣多參數測量浮標,設計了集成激光測風雷達等多種國產最新型海洋、大氣傳感器的數據采集系統。該系統對海氣觀測浮標全國產替代技術,進行了有益的探索,積累了大量設計與制造經驗。
本文以滿足各傳感器工作條件為前提,論述了傳感器布設、電源供電、太陽能補充、多源多類數據接口、衛星通信、主控模塊與控制軟件等功能單元的設計與實現方案。從選型與工作模式等多方面重點關注系統能耗優化,實現連續工作1 a及在南海北部特定海洋環境下連續工作15 d無能源補充的低功耗目標。此外,將傳感器布局設計與浮標風浪響應仿真融入傳統數采系統設計流程中,保障了浮標風壓傾斜力臂、穩性衡準數等指標符合相關檢測與設計規則要求,極大提高了數采系統設計結果的針對性與可靠性。理論計算、仿真實驗與系泊實驗結果,證實本文各項設計滿足了預定的設計目標要求。后續將通過海上試驗,對各部分設計形成反饋,以進一步提高其性能。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32