多曝光星敏感器的全運動參數建模及優化設計
2021-11-18 06:28:06于文波武佩宣傳忠張春慧江潔
北京航空航天大學學報 2021年10期
于文波,武佩,宣傳忠,張春慧,江潔
(1.內蒙古農業大學 機電工程學院,呼和浩特 010018;2.北京航空航天大學 儀器科學與光電工程學院,北京 100083)
星敏感器是目前已知的最高精度姿態測量儀器,其以高精度、自主性和無漂移等優點,在航天、航空、航海等各類導航任務中均獲得了廣泛應用[1-3],舉世矚目的北斗導航衛星即采用星敏感器作為自身核心導航部件[4]。傳統星敏感器主要工作于靜態或低速運動場合,且姿態更新率較低;但是,隨著航空航天技術的不斷發展,某些快速機動導航任務,如敏捷衛星、空間武器或彈道導彈等,不僅要求星敏感器具有高動態性能[5-7],還要求其必須具有高姿態更新率特性[8]。這是因為隨著載體機動性提高,其姿態變化率增大,星敏感器的姿態更新率必須同步提高,才能實現從離散測量數據到載體連續變化姿態數據的精準刻畫與有效恢復。
為了提升星敏感器的姿態更新率,鐘紅軍[9]與毛曉楠[10]等將星敏感器工作過程大體分為星圖曝光成像、星圖像素數據傳輸與處理、星跟蹤與姿態解算3個階段,并提出一種并行流水線處理方法,使得更新率大小由上述三者中耗時最長的階段決定,從而提高星敏感器的姿態更新率。對于傳統星敏感器,由于所用圖像探測器的恒星探測靈敏度較低,必須以長曝光時間獲得足夠靈敏度,曝光時間是其姿態更新率的主要瓶頸;為了減小曝光時間,有學者將高靈敏度圖像探測器(如電子倍增電荷耦合器、像增強型圖像探測器等)引入星敏感器領域,曝光時間的縮短在一定程度上提高了星敏感器的姿態更新率[11-12],此時,星圖像素數據傳輸與處理時間成為姿態更新率的新瓶頸。為了減小星圖像素數據處理時間,筆者提出了一種多路星點質心提取方法[13],利用并行處理思想對星圖像素數據進行處理、提取星點質心結果,有效減小了像素數據處理時間,進而提高姿態更新率,但像素數據傳輸時間受到圖像探測器本身輸出能力的制約,無法顯著減小。
為了全面提升姿態更新率,筆者在前期研究中,提出了一種基于像增強型圖像探測器的多曝光成像方法[14]。該方法能夠根據載體機動角速度大小自適應插入N次短時間曝光,從而實現在單幀星圖中記錄N個時刻的星點位置信息,當分別按照N個成像時刻進行星跟蹤與姿態解算時,可以得到N個時刻對應的姿態信息,從而等效為將姿態更新率提高N倍。盡管上述方法的應用前景較為可觀,但其在實際應用中存在如下問題:隨著星敏感器的運動角速度及角加速度增大,多曝光成像的星點軌跡長度增加,若星敏感器的極限敏感星等、視場大小等光學參數與角速度及角加速度等運動參數不匹配,則相鄰軌跡出現相互交叉問題的概率顯著增大,這將嚴重影響后續的星點質心提取及姿態跟蹤解算,從而影響多曝光成像方法的性能。
為此,本文進一步對多曝光成像方法進行深入研究。首先,建立了復雜運動條件下全像面星點成像位置模型;然后,據此對星敏感器的極限敏感星等、視場大小等光學參數與角速度及角加速度等運動參數進行最優化匹配設計與仿真分析;最后,基于上述優化參數設計星敏感器,進行外場觀星實驗,實驗結果驗證了所提方法的有效性。
1 多曝光星敏感器的基本工作原理
多曝光星敏感器的基本工作原理如圖1(c)所示,為了對照說明,圖1(a)、(b)分別給出了傳統星敏感器與現有像增強型星敏感器的基本工作原理[14]。圖1中,階段1、階段2、階段3分別對應星敏感器的3個流水線工作階段,即星圖曝光成像、星圖像素數據傳輸與處理、星跟蹤與姿態解算,Te、Tp和Tq分別為上述3個階段所需的處理時間,T為星敏感器的工作周期,F為星敏感器的姿態更新率。
對于傳統星敏感器,如圖1(a)所示,由于圖像探測器靈敏度較低,必須以長曝光時間獲得足夠的靈敏度。因此,長曝光時間Te是傳統星敏感器姿態更新率F的主要瓶頸。對于現有像增強型星敏感器,像增強器的引入,能夠對微弱的星光信號進行顯著放大,從而極大縮短了星敏感器的曝光時間Te,在一定程度上提高了姿態更新率F。然而,如圖1(b)所示,曝光時間縮短后,星圖像素數據傳輸與處理成為流水線中耗時最長的階段。特別的,當大面陣圖像探測器應用于星敏感器領域時,這一階段的耗時Tp更長,極大限制了姿態更新率F的進一步提高。
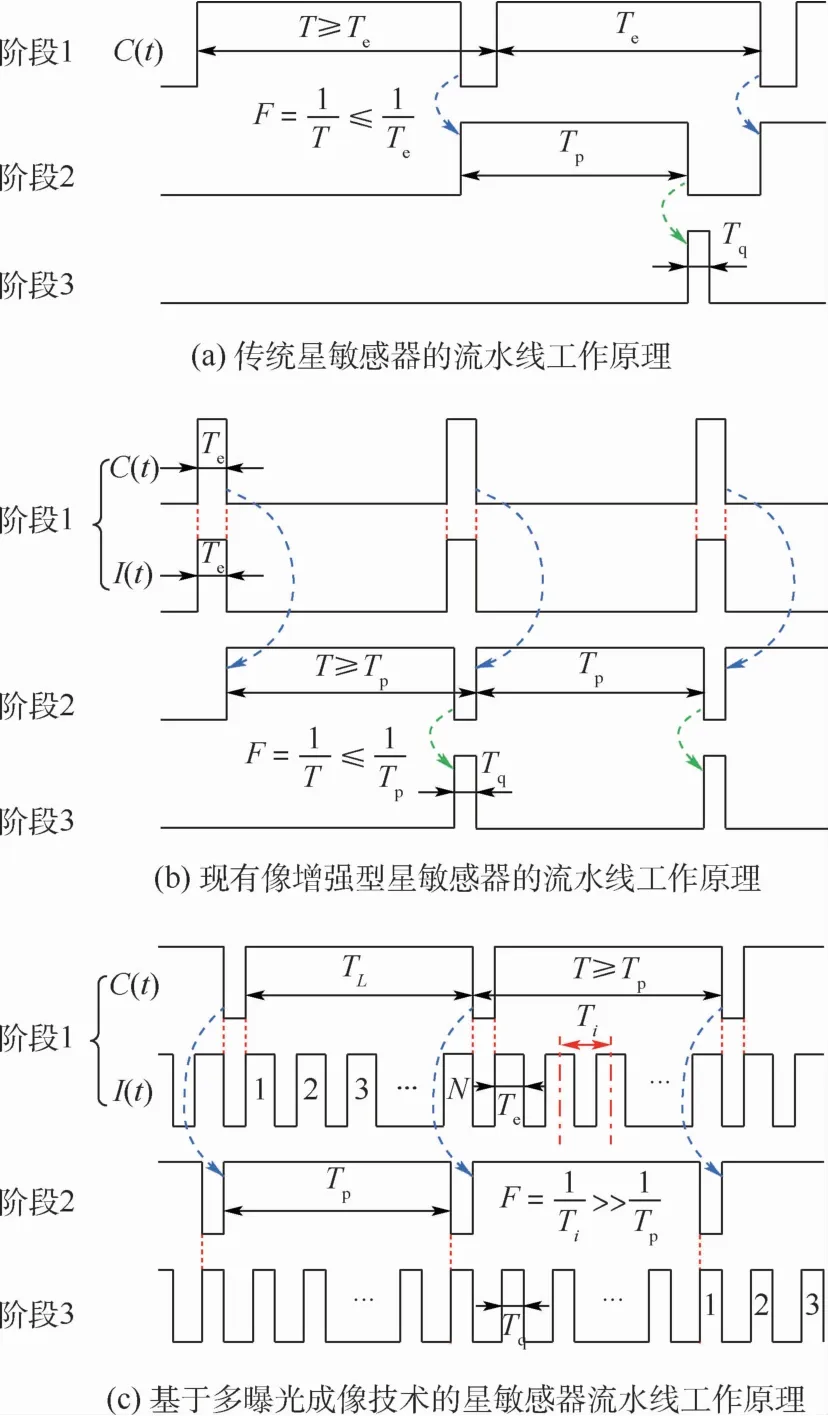
圖1 不同曝光工作模式下的星敏感器流水線示意圖Fig.1 Schematic diagram of workflow of star trackers in different exposure modes
為了突破星圖像素數據傳輸與處理時間Tp對姿態更新率F的制約,筆者提出了一種像增強型星敏感器的多曝光成像方法[14],其流水線工作原理如圖1(c)所示。由于像增強型星敏感器的曝光時間Te遠小于處理時間Tp,在較長的時間Tp內不只可以進行一次短時曝光,而是可以插入N個短時間采樣曝光Te,N為多曝光成像次數。此時,單幀星圖實際上記錄了星點在N個時刻的成像信息,當分別按照成像時刻對其進行星跟蹤與姿態解算時,可以得到N個時刻對應的姿態信息,從而等效為將星敏感器的姿態更新率F提高N倍。
需要注意的是,多曝光成像方法主要適用于動態場合,當星敏感器處于靜態時,將導致多曝光成像星點混疊,從而無法利用混疊星點信息解算出星敏感器對應時刻的姿態。仿真實驗表明[14],隨著星敏感器運動角速度逐漸增大至20(°)/s,相應的姿態更新率F最高可達210 Hz,遠高于現有更新率技術的10 Hz水平。
然而,上述方法在實際應用中存在如下問題:隨著星敏感器的全運動參數(包括運動角速度及角加速度)逐漸增大,多曝光成像星點的運動位移增加,若全運動參數與星敏感器的極限敏感星等、視場大小等參數不匹配,則相鄰星點軌跡相互交叉情況的發生概率顯著增大,這將嚴重影響后續的星點質心提取及姿態跟蹤解算,從而影響多曝光成像方法的性能。為此,下面對多曝光星敏感器的全運動參數進行定量建模分析。
2 全運動參數建模分析
圖2為單顆導航星的多曝光成像示意圖。若A(t)表示t時刻星敏感器的姿態矩陣,vi(t)和ri分別表示視場內第i顆恒星的單位觀測矢量和參考矢量,則三者滿足如下關系:
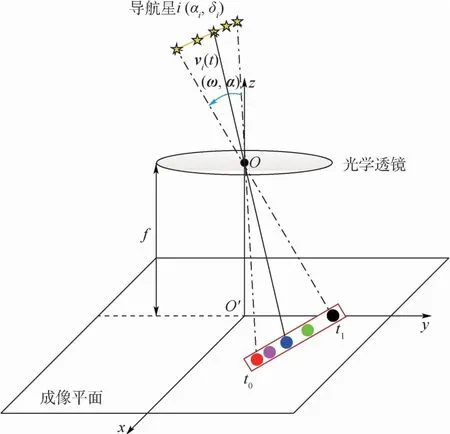
圖2 單顆導航星多曝光成像示意圖Fig.2 Schematic diagram of multiexposure imaging of single guide star

式中:vi(t)和ri在星敏感器坐標系和天球坐標系下的表達式為
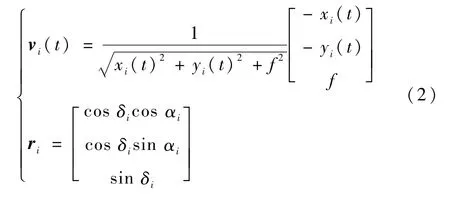
其中:(xi(t),yi(t))為第i顆導航星在像面上的成像星點的橫縱坐標;f為星敏感器的焦距;(αi,δi)為第i顆導航星在天球坐標系下的赤經和赤緯。
如圖2所示,在一個星敏感器工作周期內,第i顆恒星的成像星點自t0時刻位置運動至t1時刻位置,由式(1)可知:

由于參考矢量ri不隨時間變化而發生改變,由式(3)可得

式中:A(t0)T為t0時刻星敏感器坐標系到天球坐標系的旋轉矩陣;為星敏感器坐標系自t0時刻到t1時刻的轉移矩陣。
當運動時間Δt=t1-t0足夠小時,轉移矩陣近似滿足如下表達式[15]:
式中:I3×3為3×3單位矩陣;Δξ=[ΔξxΔξyΔξz]T為運動時間Δt內的旋轉角;[[Δξ]]為旋轉角Δξ的反對稱矩陣。
在較小的Δt時間內,對角速度變化情況進行一階近似,其表達式為

式中:ω0=[ωx(t0)ωy(t0)ωz(t0)]T和α0=[αx(t0)αy(t0)αz(t0)]T分別為t0時刻的角速度和角加速度。
此時,由式(6)可得,旋轉角Δξ的表達式為

將式(2)和式(8)代入式(4),并考慮到焦距f是時不變的,則t0時刻和t1時刻對應的單位觀測矢量之間關系的二維簡化表達式為
式(9)中,根據星敏感器的參數進行計算可知,通常(-xi(t0)Δξy+yi(t0)Δξx)/f<0.01,相比于分母具有的常數項“1”可以忽略不計。因此,式(9)可以近似簡化為

式(10)即為基于全運動參數的星點成像位置模型,表明了星敏感器在復雜運動條件下,t1時刻的星點成像位置坐標(xi(t1),yi(t1))由t0時刻的位置坐標(xi(t0),yi(t0))、焦距f、運動時間Δt及全運動參數(角速度ω0與角加速度α0)完全確定。
由式(10)可得,星敏感器工作周期(運動時間)Δt內,成像星點運動位移L表達式為
式(11)表明,星點運動位移L與全運動參數直接相關,星敏感器全運動參數越大,位移L越大,相鄰星點軌跡相互交叉情況的發生概率越大,對多曝光成像方法性能影響越大。
3 全運動參數的仿真分析及優化
為了定量研究星敏感器全運動參數對星點軌跡交叉問題的影響,下面進行仿真分析。若星敏感器像面分辨率為A×A,工作周期Δt內星點運動位移為L,N(x)表示星點像面間距為x的星對數量,則相鄰星對發生交叉的概率Po可以表示為
式(12)中,像面總長度A為常數,則相鄰星對交叉概率Po由運動位移L確定,而由式(11)可知,運動位移L由星點初始位置坐標(xi(t0),yi(t0))、焦距f、工作周期Δt及全運動參數(角速度ω0與角加速度α0)完全確定。
式(11)中,考慮到初始位置坐標(xi(t0),yi(t0))與焦距f分別對視軸方向角位移Δξz與垂直視軸方向角位移Δξx、Δξy產生作用,為深入分析各自作用效果,下面分2類進行討論。
3.1 垂直視軸方向
若星敏感器僅存在垂直視軸方向的角位移,則由式(11)可知,運動位移L僅與焦距f有關,而與初始位置坐標(xi(t0),yi(t0))無關。為簡化運算,不妨假設星敏感器角速度ω=[ωx0 0]T和角加速度α=[αx0 0]T,則在不同焦距f下,當ωx或αx變化時,交叉概率Po的變化規律分別如圖3和圖4所示,仿真中涉及的其他參數如表1所示。圖3、圖4中,焦距f為42.78,31.94,25.40,21.02 mm時,對應的星敏感器視場大小分別為15°×15°,20°×20°,25°×25°,30°×30°。
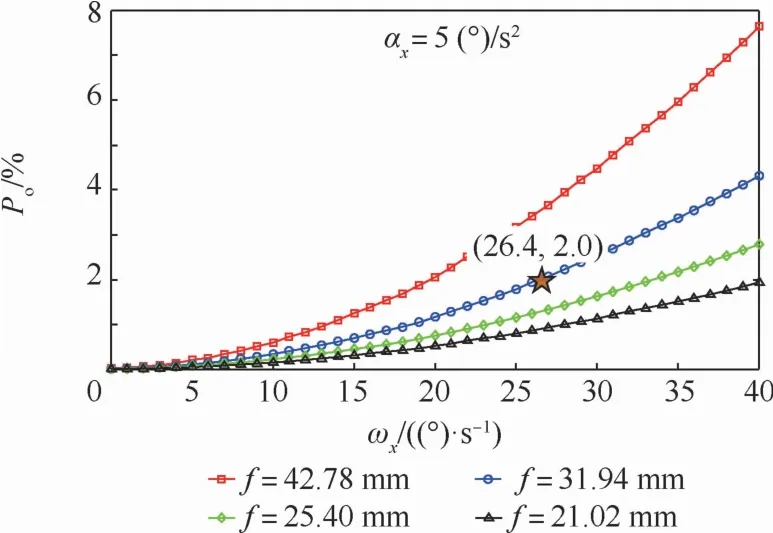
圖3 交叉概率隨角速度ωx變化Fig.3 Cross probability versus angular velocityωx
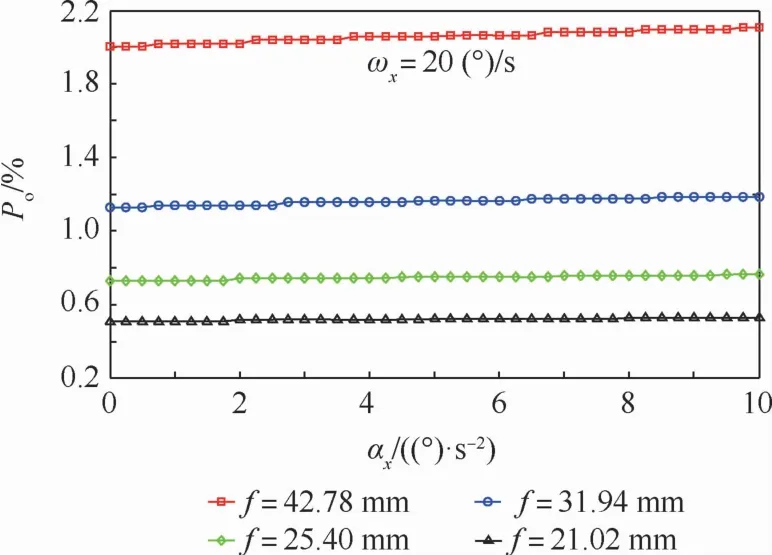
圖4 交叉概率隨角加速度αx變化Fig.4 Cross probability versus angular accelerationαx
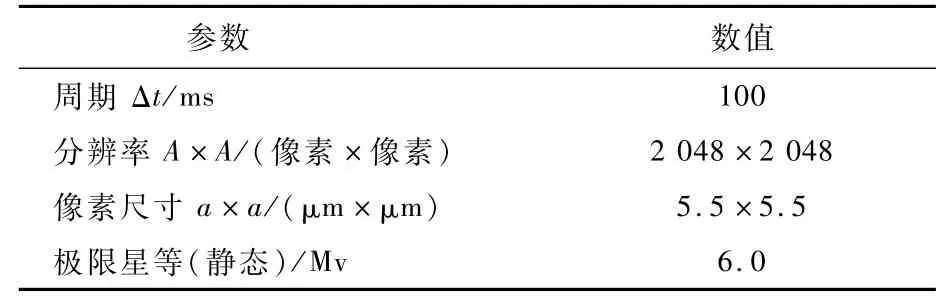
表1 星敏感器部分仿真參數Table 1 Part of simulation parameters of star tracker
由圖3可知,當固定角加速度大小αx=5(°)/s2,角速度大小ωx由0(°)/s逐漸增大至40(°)/s時,交叉概率Po顯著增大,同時,隨著焦距增大,交叉概率Po同樣逐漸增大。由圖4可知,當固定角速度大小ωx=20(°)/s,角加速度大小αx由0(°)/s2逐漸增大至10(°)/s2時,與圖3相比,交叉概率Po變化較為緩慢,這是因為角加速度α通過工作周期Δt的平方影響角位移Δξ,α大小變化對Δξ影響不大;但是,隨著焦距增大,交叉概率Po顯著增大。需要注意的是,盡管焦距減小有利于交叉概率降低,但是焦距變化還會影響光學鏡頭的口徑大小,若焦距過小,則會使得鏡頭口徑減小,不利于收集微弱恒星信號,因此,最終選擇f=31.94 mm。
3.2 視軸方向
由式(11)可知,若星敏感器僅存在視軸方向的角位移Δξz,則運動位移L的表達式為

式中:rz為初始位置坐標(xi(t0),yi(t0))與坐標原點的距離。
由式(13)可知,此時L僅與初始位置坐標(xi(t0),yi(t0))有關,而與焦距f無關。
設星敏感器角速度ω=[0 0 ωz]T和角加速度α=[0 0 αz]T,則在不同距離rz像素下,當ωz或αz變化時,交叉概率Po的變化規律分別如圖5和圖6所示。
由圖5和圖6可知,交叉概率Po隨著角速度ωz或角加速度αz的增大而增大;同時,Po還與星點初始位置有關,星點越靠近成像平面邊緣,即距離rz越大,則交叉概率Po越大。
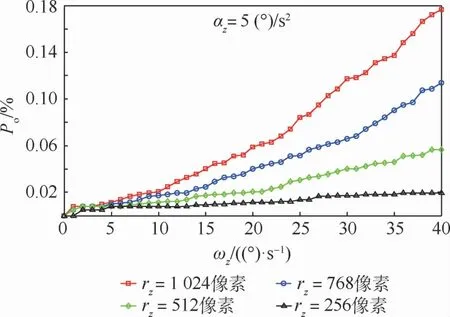
圖5 交叉概率隨角速度ωz變化Fig.5 Cross probability versus angular velocityωz
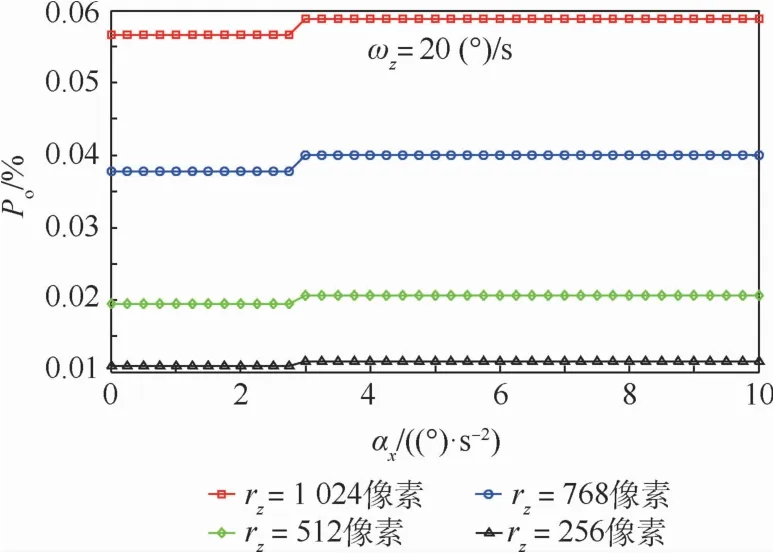
圖6 交叉概率隨角加速度αz變化Fig.6 Cross probability versus angular accelerationαz
對比圖3、圖4和圖5、圖6可知,交叉概率Po受到垂直視軸方向角速度、角加速度變化的影響比視軸方向角速度、角加速度變化的影響更為顯著,前者的交叉概率Po比后者至少大一個數量級,因此,相比于垂直視軸方向影響,視軸方向對Po的影響可以忽略不計。考慮到工程實際應用,設定Po≤2%為星點不出現交叉情況的安全范圍,則如圖3所示,在角加速度大小為5(°)/s2情況下,確定角速度大小的極限安全值為26.4(°)/s。
4 外場觀星實驗
為了驗證本文方法的有效性,進行了真實外場觀星實驗。圖7為真實外場觀星的實驗裝置示意圖,圖中實驗裝置主要包括多曝光星敏感器、便攜式高精度轉臺及三角架等。多曝光星敏感器牢固安裝在便攜式高精度轉臺上,并隨轉臺一起運動,轉臺的角速度與角加速度在理論仿真的極限安全值范圍內變化(即角速度≤26.4(°)/s,角加速度≤5(°)/s2)。

圖7 夜晚外場觀星實驗裝置示意圖Fig.7 Night star observation out-field experiment setup
實驗拍攝了大量多曝光成像星圖,任意選取其中2幅星圖,如圖8所示。圖8(a)中,多曝光次數N=3,圖中共包含10顆導航星的全部3次曝光星點信息;圖8(b)中,多曝光次數N=5,圖中共包含7顆導航星的全部5次曝光星點信息。上述星圖中均未出現相鄰星點軌跡交叉問題,因而不對多曝光成像性能產生影響。進一步,實驗拍攝的大量多曝光成像星圖,當星敏感器的角速度與角加速度在理論仿真的極限安全值范圍內變化(即角速度≤26.4(°)/s,角加速度≤5(°)/s2)時,均未出現相鄰星點軌跡交叉問題,表明相鄰星點交叉情況為小概率事件(即滿足Po≤2%),這與前述理論分析及仿真結果一致,從而驗證了本文方法的有效性。
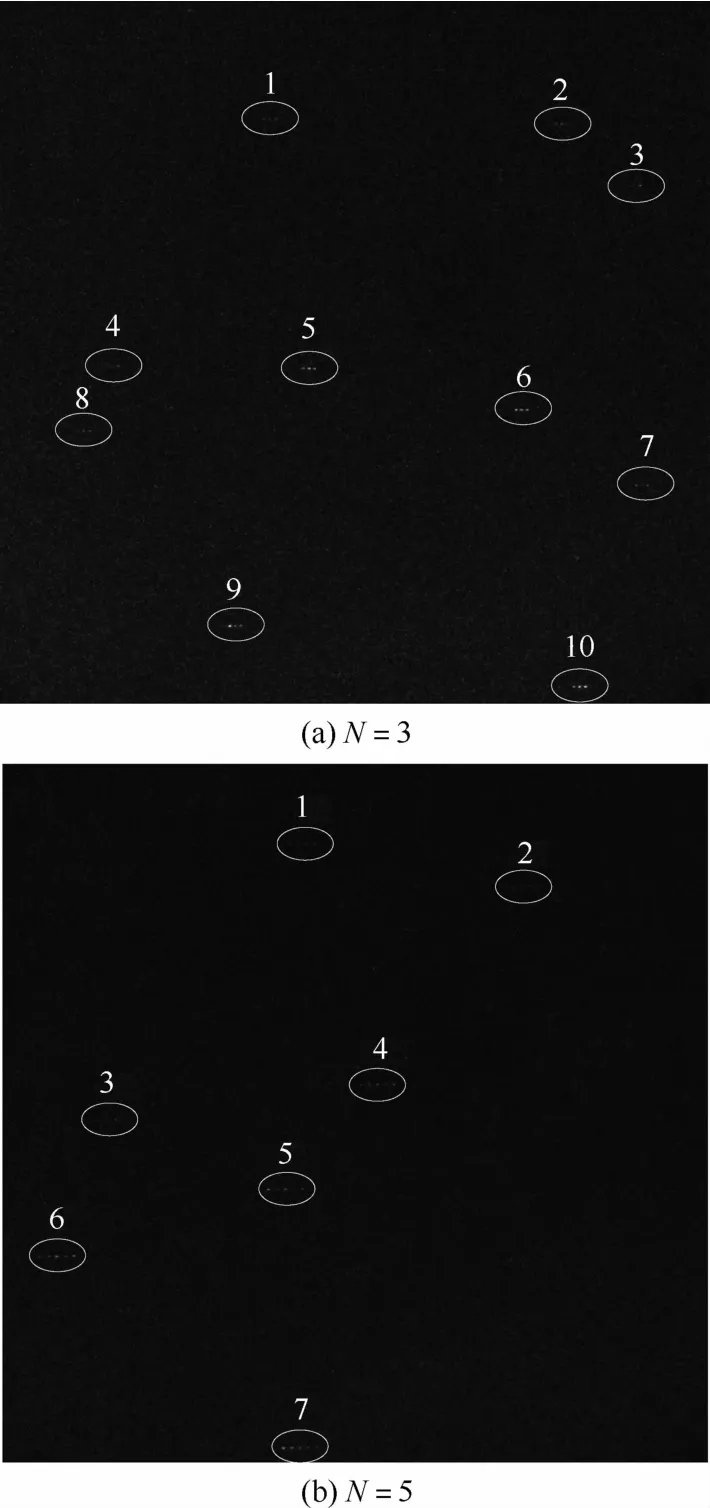
圖8 不同多曝光次數的成像星圖Fig.8 Star images with different multiexposure times
5 結論
1)在星敏感器全運動參數分析基礎上,結合星敏感器的工作原理,對星點成像位置進行了建模。
2)根據星點成像位置模型,對交叉概率大小進行理論分析與數值仿真,仿真結果表明,在設定交叉概率不超過2%的安全范圍下,角速度與角加速度的極限安全值分別為角速度≤26.4(°)/s,角加速度≤5(°)/s2。
3)外場觀星實驗結果與理論分析及數值仿真結果一致,驗證了本文方法的有效性。