基于視覺識別技術的醫藥品智能識別方法設計
2021-11-24 23:43:30倪秉軒袁鵬凱張慶旭陳學琪
科技信息·學術版 2021年21期
倪秉軒 袁鵬凱 張慶旭 陳學琪
摘要:在醫藥,食品,3C行業存在著大量輕小物料分揀存取的作業環境。為避免傳統用人方式中效率低下,用工難,成本高等問題,團隊主要針對于醫療用品及藥品分揀和發放設計出醫藥品智能分發機器人,機器人以STM32F103為主控芯片,運用機械臂在配合視覺識別的基礎上完成傳送帶上雜亂無章產品的快速分揀,搬運等環節,替代現場人工大量重復性勞動。設備端的MCU內置藍牙串口和WiFi模塊,可實現遠程操作、實時監控。
關鍵詞:STM32;視覺識別;機器人
1 引言
當今社會就醫面臨的突出矛盾和困難主要為“看病難”,由于優質醫療資源相對于居民需求的不足,造成患者去大醫院看專家“難”。突出表現為許多人看小傷小病也涌到大醫院,大醫院人滿為患。這形成了就醫等待時間長,看病困難的局面。在醫院藥房取藥時,人工操作需要醫護人員大量的時間及精力用于對患者的藥物藥品的分揀與發放。為提升基層醫療資源配置和服務能力,降低群眾就醫成本;規范醫療用品及藥品的分揀和發放,合理運用醫院人力資源;減少人員密集接觸,減少患者在醫院停留時間。設計基于視覺識別技術的醫藥品智能機器人,應用基于視覺識別技術的醫藥品智能識別方法,從減少醫療物資存取時間為切入點,解放醫院工作者勞動力,提供更多靈活性、提升成本效益,進而改善就醫環境、就醫效率,幫助改善“看病難”現狀。
設計也適用于小型快遞網點、倉庫等輕小物料分揀存取的工作環境。可解決生活中的難題,為大眾帶來便利,并結合新常態下產業轉型升級,順應當今產業發展由粗放型向集約型轉變的洪流趨勢,為經濟可持續發展貢獻力量。
2.系統總體設計
機器人存在的意義就是為人服務,其具備工具、經濟、技術、社會屬性。隨著運行、使用成本高等難題的解決,人工智能與機器人的融合正成為新趨勢。然而國內機器人產業發展包括研發試驗、機器人本體和零部件產業化、系統集成技術等每一個產業從整體來看,產品以低端為主,我國大部分機器人企業目前集中在集成領域,加工組裝企業占多數,國產六軸工業機器人占全國工業機器人新裝機量不足10%;在核心及關鍵技術的原創性研究、高可靠性基礎功能部件、系統工藝應用解決方案以及主機批量生產等方面,距發達國家還有相當大的差距。
醫藥品智能分發機器人項目的研究根據市面上的分揀機器人為對照,從造價及操作方式等方面進行改進,我們的醫藥品智能分揀系統能夠準確地將藥物識別并將其存放或取出于準確位置,控制系統通過選擇基礎單元元件來完成系統程序的初始化,機械關節的轉動、網上實時監視與控制,出色地完成操作人員指定任務要求,其本身有價格低廉、性價比高、體積小、易操作、普適性強等特點。
智能醫藥分揀機器人在軟件和硬件上均采用模塊化設計,根本是由主控模塊、圖像采集模塊、電機驅動模塊、電源穩壓模塊、機械臂模塊組成。
3.硬件設計與完成
3.1核心控制模塊
STM32F103 ARM最小系統:STM32F103芯片是由ST(意法半導體)公司推出的一種ARM芯片,其內核是ARM 32位的Cortex-M3,其內核最高72MHz工作頻率。閃存程序存儲器從16K到512K字節的,SRAM最大64K字節。STM32F103 ARM最小系統主要是由晶振電路、復位電路和電源電路組成。
在使用STM32和機械臂通訊時,其實就是控制舵機,給舵機輸入PWM信號,來控制其旋轉到不同的角度。PWM是一種對模擬信號電平進行數字編碼的方法,通過高分辨率計數器的使用,方波的占空比被調制用來對一個具體模擬信號的電平進行編碼。PWM 信號是數字的,因為在給定的任何時刻,滿幅值的直流供電要么完全有(ON),要么完全無(OFF)。電壓或電流是以一種通或斷的重復脈沖序列被加到模擬負載上去的。通的時候即是直流供電被加載到負載上的時候,斷的時候即是供電被斷開的時候。所以只要帶寬足夠,我們就可以使用PWM進行編碼。想要輸出PWM信號就得用上TIM定時器,而基本定時器沒有PWM信號的輸出功能,所以只能選用通用定時器和高級定時器。以通用定時器為切入口,除了基本的定時器的功能外,還具有測量輸入信號的脈沖長度( 輸入捕獲) 或者產生輸出波形( 輸出比較和PWM),通用定時器的時鐘來源有:內部時鐘(CK_INT)、外部時鐘模式1:外部輸入腳(TIx)、外部時鐘模式2:外部觸發輸入(ETR)、內部觸發輸入(ITRx):也就是使用一個定時器作為另一個定時器的預分頻器。我們可以通過“‘開啟該外設的時鐘’、‘配置初始化結構體(如果有對應的GPIO還需要初始化該GPIO)’、‘調用結構體初始化函數’”的方式輸出PWM信號編碼所需模擬值達到控制機械臂的目的。
3.2視覺識別模塊設計
運用視覺識別技術識別各種已有藥物藥品,根據指令通過機器人進行自動分析及分類。視覺識別采用MaixBit開發板,采用的芯片是k210。它的內核主要采用的是RISC-V Dual Core 64bitwith FPU,其主頻為400MHz。靜態處理器選用的是內置的8MByte。在圖像識別模塊,用到的是QVGA@60fps/VGA@30fps添加語音模塊,語音識別用到的是麥克風陣列(8mics)。可以通過視覺攝像頭拍攝到藥物藥品的圖像,識別后通過信息處理,再通過通信口進行視覺傳感器和STM32之間的通信,將信息傳輸給STM32。通過設置指令進行通訊,再通過指令進行數據的傳輸,接傳輸指令后STM32極速進行內部識別判斷,準確對指令進行數據傳輸,通過 STM32與機械臂通信,將正確的所需的藥物藥品進行分揀拾取。藥物藥品可以根據種類存放在相應的存儲空間或根據處方將藥物藥品發放到患者手中。還可以用視覺系統識別醫療用品,如手術刀、紗布、剪子等。
4.視覺識別算法設計
4.1識別底層算法
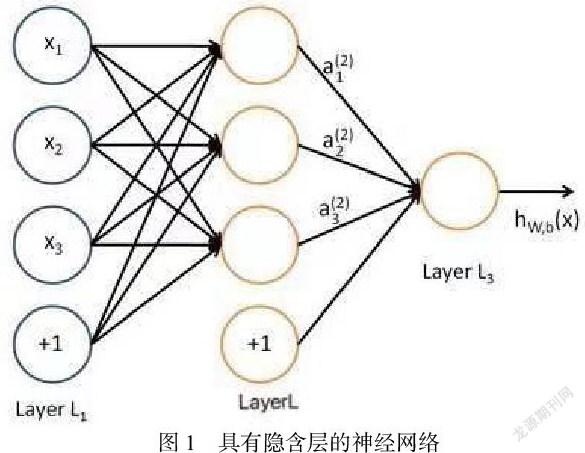
每一個底層單元也可以被稱作是Logistic回歸模型。當將多個單元組合起來并具有分層結構時,就形成了神經網絡模型。如圖1展示了一個具有一個隱含層的神經網絡。
在圖像處理時,往往把圖像表示為像素的向量,比如一個1000×1000的圖像,可以表示為一個1000000的向量。在上一節中提到的神經網絡中,如果隱含層數目與輸入層一樣,即也是1000000時,那么輸入層到隱含層的參數數據為1000000×1000000=10^12。所以圖像處理要神經網絡必先減少參數加快速度。
在局部連接中,每個神經元都對應100個參數,一共1000000個神經元,如果這1000000個神經元的100個參數都是相等的,那么參數數目就變為100。將這100個參數(也就是卷積操作)看成是提取特征的方式,該方式與位置無關。這其中隱含的原理則是:圖像的一部分的統計特性與其他部分是一樣的。所以對于這個圖像上的所有位置,都能使用同樣的學習特征。
4.2 控制算法設計
系統核心處理器選擇的是STM32的F103系列芯片。視覺識別模塊和STM32通信時,收發控制器根據寄存器配置,對數據存儲轉移部分的移位寄存器進行控制。當需要發送數據時,內核或DMA外設把數據從內存(變量)寫入到發送數據寄存器TDR后,發送控制器將自動把數據從TDR加載到發送移位寄存器,然后通過串口線TX,把數據一位一位地發送出去。對于K210芯片的訓練,使用MixHub平臺進行訓練,需要做的是目標檢測,并給出物體的具體位置信息。
5 結論
設計STM32F103 ARM芯片設計醫藥品智能識別控制系統,研究和應用基于視覺識別技術的醫藥品智能識別方法。系統采用模塊化設計,每個功能使用相應功能模塊電路,安裝調試方便。系統性能穩定,抗干擾能力強,搬運物品方便快捷。機械臂自動分揀系統的出現極大地解放人的雙手,機械裝置能夠替代人員去從事絕大部分繁重,重復性勞動,在保證貨物質量的情況下,大幅度提高工作效率。
隨著現代科學技術蒸蒸日上的發展和相關技術理論在面向對象過程中得到的實踐,機械臂操作系統技術方面的研究也得到了不斷的創新,并將為社會創造巨大的財富。
參考文獻:
[1]何惜琴.以技能競賽引領電子專業教學改革研究[J].信息系統工程,2020(11)
[2]戶碩.搬運機器人的設計與制作[J].煤礦機械,2015(8)
[3]紀利琴,王健,熊偉.基于藍牙模塊的單片機雙機通信的實現[J].科技視界,2019(19)
[4]黃樹琳,張鋒.基于視覺識別的物料分揀機器人設計[J].自動化與儀表,2019,34(11)
基金項目:國家級大學生創新創業訓練計劃項目“醫藥品智能分發機器人”(項目號:202110066024)
作者簡介:倪秉軒(2001-),男,本科生,自動化(電氣技術教育方向)專業。
