無人液體配比實驗室
2021-11-25 09:08:10張海國崔志亮楊豪曹蘇群
機械工程師 2021年11期
張海國,崔志亮,楊豪,曹蘇群
(淮陰工學院,江蘇 淮安 223000)
0 引言
目前在化工行業中,采用化學液體配比來得到需要的液體濃度,或者人為觀察調配時的反應情況是最為普遍的實驗現象,尤其在化學實驗室。可是,很多化學試劑對人體具有不可逆轉性的危害:例如硫酸的強烈刺激及腐蝕性作用;丙酮的易揮發性并且對人體中樞神經系統起到抑制麻醉作用[1];氯苯酚對眼睛、黏膜、呼吸道及皮膚有強烈刺激作用,吸入后可能發生喉、支氣管的炎癥、水腫、痙攣,以及化學性肺炎等[2]。對于人體近距離調配化學液體,稍有不慎很有可能會對人體造成不可逆的損害,造成非常嚴重的事故,實驗風險性大。因此,設計一種無人液體配比實驗室顯得非常必要,無人液體配比實驗室的設計致力于解放實驗人員的雙手,實現實驗員在試劑配比過程中與化學試劑達到“零”接觸的效果,提高化工液體配比工作的安全性,保障實驗人員的健康安全。
該方案設計了一種無人液體配比實驗室,將計算機視覺與化工實驗室結合,主要采用雙目視覺定位技術,完成對化學實驗室中器材的識別與定位,配合機械臂等現代智能化手段取代傳統的手工配比方式,以達到實現化學試劑無人化配比的目的。
1 需求分析
1.1 硬件需求
本方案設計的一種無人液體配比實驗室,實驗臺上應包括傳統化學配比實驗室所需的實驗設備,如燒杯、量筒等。除此之外,還應包括無人液體配比實驗室所需的其他設備,如攝像裝置、機械臂、運行車等。這些設備將代替實驗員進行具體的處理操作,完成試劑的配比工作。
1.2 功能需求
為實現無人液體配比實驗室的功能,本技術方案采用計算機視覺與化工實驗室結合設計方式。利用攝像裝置代替實驗人員的眼睛,對實驗室中的實驗器械及實驗環境進行監控,采集獲得實驗室數據。機械臂代替實驗人員的雙手,抓取實驗室中各種實驗器材,完成化學試劑的配比工作。上位機相當于實驗人員的大腦,用于處理各類數據信息,并完成各種信號的傳遞,達到無人化配比的目的。
2 實驗室環境搭建
該方案設計的一種無人液體配比實驗室的完整硬件結構應包括實驗臺、操作臺、器皿架、各種器皿、攝像裝置、滑軌、運行車、中控機、機械臂。其整體組成結構示意圖如圖1所示。
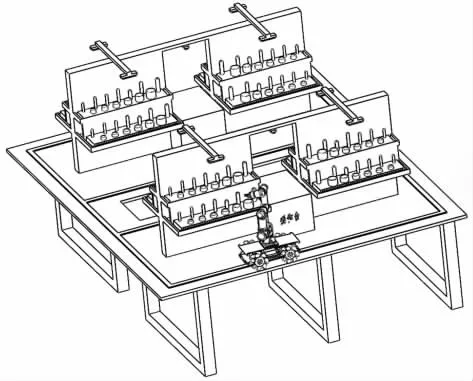
圖1 整體結構組成示意圖
為獲得實驗所需的圖像數據,本方案共采用8個雙目裝置。8個雙目裝置均勻地分布在兩排器皿架的正上方,分別通過支架固定在操作臺的頂部。攝像裝置的攝像范圍為器皿架、操作臺和實驗臺的臺面。雙目裝置包括雙目攝像頭和安裝在雙目攝像頭邊上的補光燈,補光燈為雙目攝像頭提供了亮度支持,有利于提高機械臂定位的準確度。
為了保障運行車能夠更加方便地實現全方位移動的功能,本技術方案中采用麥克納姆輪作為移動滾輪。麥克納姆輪可以保證在不改變機輪自身方向的前提下自由移動,同時在它的輪緣上斜向分布著許多小滾子,故輪子可以橫向滑移。麥克納姆輪結構緊湊、運動靈活,是很成功的一種全方位輪[3]。由此組裝而成的運行車可以更靈活方便。
3 核心技術
3.1 坐標系的建立與轉換
視覺定位系統的最終目的是為了從二維圖像中獲取現實世界中物體的三維坐標信息,也就是說,從圖像像素之間的相關關系轉換到物理世界之間的相關關系[4]。在進行攝像機標定的過程中涉及了像素坐標系、相平面坐標系、相機坐標系、世界坐標系的相互轉換[5]。相機投影過程的坐標系建立如圖2所示。
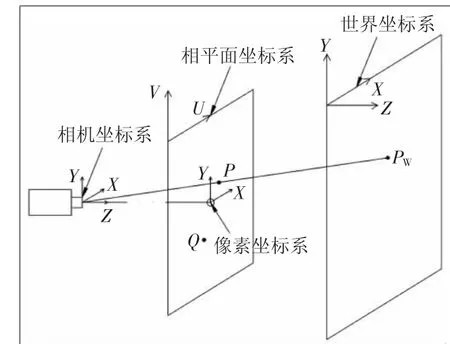
圖2 相機投影過程的坐標系建立圖
像素坐標系由橫坐標u,縱坐標v軸組建而成,其基本單位是像素點。相平面坐標系由x、y軸組建而成,其基本單位為mm。相機坐標系由Xc、Yc、Zc組建而成,相機模型光心作為原點,Z軸與成像平面是垂直關系,其基本單位是m。世界坐標系由Xw、Yw、Zw表示,描述攝像機的位置,根據情況可以表示任何物體,其基本單位是m。
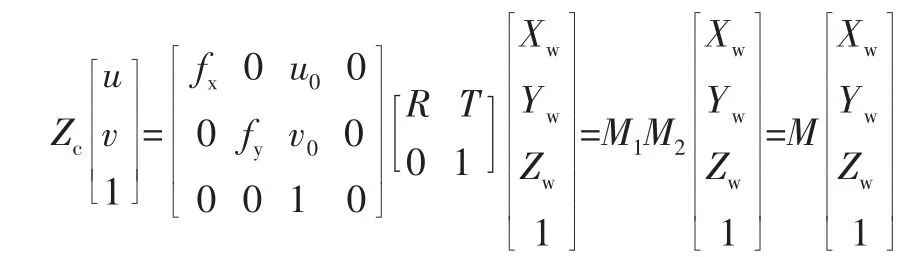
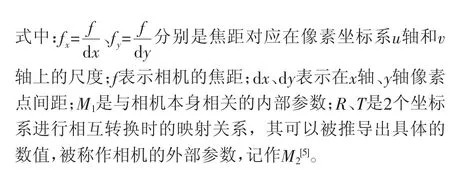
其任意一點在像素坐標系、相平面坐標系、相機坐標系、世界坐標下的轉換公式為
3.2 立體匹配
立體匹配的目標是從不同視點圖像中找到匹配的對應點。對雙目攝像頭采集到的圖像進行立體校準,分析立體匹配的對極線、唯一性、順序一致性、視差范圍等約束條件,運用SGBM算法求取目標物視差圖,恢復場景的深度信息。
半全局優化算法SGBM算法具有4個基本步驟:圖像預處理操作、代價值的獲取、動態規劃算法、圖像后處理[5]。
3.3 手眼標定
手眼系統是工業機器人視覺應用最廣泛的形式,在本方案設計的一種無人液體配比實驗室中手眼標定是必不可少的關鍵技術。手眼標定的目的是確定視覺坐標系與機器人坐標系的映射關系,從而獲取目標在機器人坐標系的位姿,進而實現視覺引導[6]。
按照機器人末端與視覺系統的安裝關系,手眼系統可歸結為兩大類:一種是視覺系統安裝在末端上,稱為眼在手上(Eye-in-Hand)模式;另一種視覺系統與末端分離,安裝在固定位置,不與末端隨動,稱為眼在手外(Eyeto-Hand)模式[7-8]。本方案設計的一種無人液體配比實驗室采用的Eye-to-Hand模式。在該模式下機器人末端和標定板末端2次運動保持不變,需求解相機與器械手臂末端的關系,從而得到雙目攝像頭在機器人基坐標系下的位姿信息[9-10]。
4 抓取系統
為實現無人液體配比實驗室的功能,本方案設計了一種基于雙目視覺定位的抓取系統。該系統主要由圖像獲取單元、中央控制單元及執行單元3個部分組成。該系統所需的如燒杯、試管等化學儀器的圖像數據由雙目攝像裝置采集獲取;中央控制單元處理雙目攝像裝置獲取的圖像數據及向執行單元發送執行指令;執行單元主要職能是驅動運行車的移動及操控機械臂完成化學試劑的配比工作。系統結構圖如圖3所示。
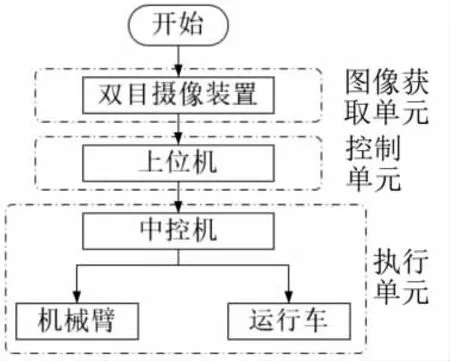
圖3 系統結構圖
圖像獲取單元獲取的圖像數據上傳至中央控制單元進行數據處理,對目標物進行定位。目標物定位流程圖如圖4所示。
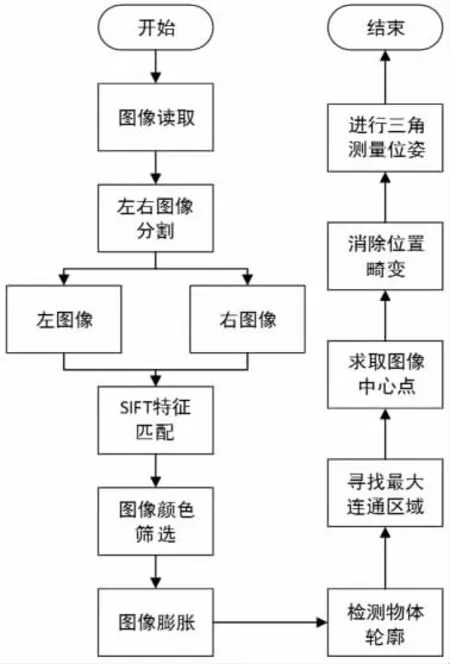
圖4 目標物定位流程圖
以燒杯作為定位目標為例,實驗中通過雙目相機采集左右圖像,對左圖像進行處理,右圖像加以輔助,實現目標的定位。圖5為目標物中心點圖。
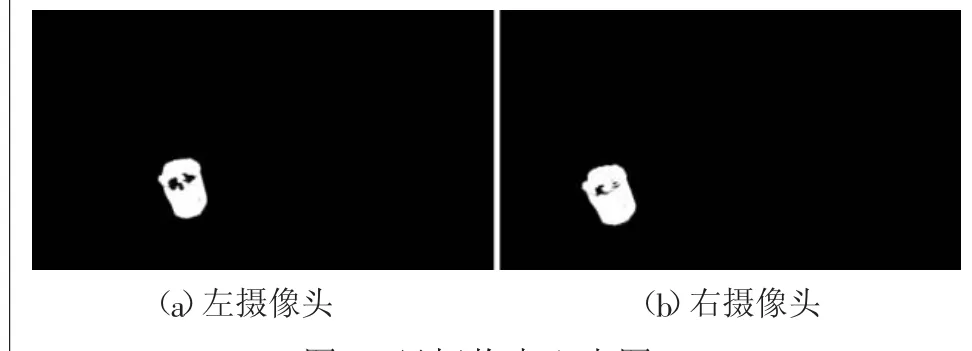
圖5 目標物中心點圖
之后中央控制單元向執行單元下達執行指令,操縱運行車和機械臂完成抓取工作。運行車的頂部安裝有用于抓取各種器皿的機械臂,機械臂包括固定在運行車頂部的底座,底座上固定連接有轉向銜接件,轉向銜接件上安裝有六自由度機械臂,六自由度機械臂的頂部安裝有抓取件,可對各種器皿進行抓取操作。執行單元結構圖如圖6所示。
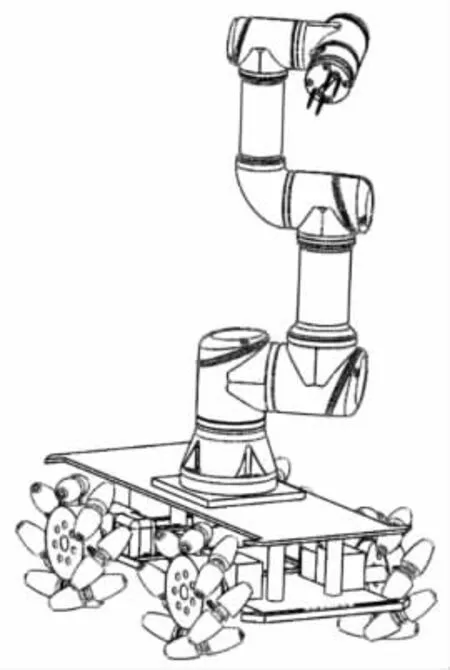
圖6 執行單元結構圖
工作原理:在實驗室外的上位機上輸入需要調配的液體,通過實驗室中的WIFI將信號傳送到運行車的中控機上,同時雙目攝像頭開始工作,雙目攝像頭將采集到的視頻實時地傳送給上位機,上位機通過接收到的視頻進行視覺識別與定位;小車沿著導軌運動,并根據雙目攝像頭定位到的器皿實現機械臂的定位抓取,并將空置器皿放置在操作臺上,機械臂再根據順序抓取所需的調配液體器皿,對準空置器皿移動一定的偏移角度實現定量配比,并將調配過的液體器皿放回原處。
5 結語
無人液體配比實驗室具有較強的使用價值,通過機械臂代替人手進行調配作業,可以減小在化學試劑配比過程當中產生的有害氣體對實驗人員的損害,對實驗研究人員具有很好的保護作用。本技術方案采用的雙目視覺定位技術發展已經相當成熟,大大提高了機械臂抓取的準確度,同時運行車采用的麥克納姆輪,增強了運行車的靈活性,大大提高了無人液體配比實驗室的可操作性。
為避免化工實驗室試劑調配過程中對研究人員的損害,本文設計了一種無人液體配比實驗室,采用雙目視覺定位技術方案,實現了化學器皿的抓取及試劑的配比,具有穩定性較好、結構簡單、易操作等特點。后續將進一步開展研究,以便滿足調配精細化要求。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
電子競技(2020年4期)2020-07-13 09:18:06
電子競技(2020年2期)2020-04-14 04:40:38
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
電子競技(2019年22期)2019-03-07 05:17:26
電子競技(2019年21期)2019-02-24 06:55:52
電子競技(2019年20期)2019-02-24 06:55:35
電子競技(2019年19期)2019-01-16 05:36:09
發明與創新(2016年38期)2016-08-22 03:02:52
