基于自然觀察數據的行人過街意圖預測模型研究
2021-11-30 06:15:36施雯趙彬劉艷娟
大學·社會科學 2021年10期
關鍵詞:機器學習
施雯 趙彬 劉艷娟

摘 ?要:車載行人預警系統在提高車輛的行車安全和行人保護方面發揮了重要的積極作用,但較高的誤報率導致該系統的接受度較低。為提高車載行人預警系統的準確率,本文利用激光雷達和高清攝像頭對行人過街時行人和車輛的行駛數據進行了采集,并對行人過街時的行為特性進行了分析,根據分析結果建立了基于隨機森林機器學習方法的行人過街意圖預測模型,模型的準確率達96.43%。結果表明,該預測模型能夠很好地對行人過街意圖進行預測,對提高車載行人預警系統的準確率具有重要意義,有助于交通安全的提高。
關鍵詞:行人預警系統;行人過街;機器學習;預測模型
中圖分類號:TP18 ? ?文獻標識碼:A ? ?文章編號:1673-7164(2021)37-0110-03
隨著智能駕駛輔助系統的不斷發展,車載行人預警系統對提高交通安全發揮了非常積極的影響[1-2]。但是該預警算法過于保守,誤報率較高,導致駕駛員對該系統的接受度不高,提高車載行人預警系統的準確率是目前亟須解決的問題。
行人作為城市道路交通中的弱勢群體,在發生交通事故時,往往會受到更為嚴重的傷害,據公安部2019年數據統計,僅在2019年,全國機動車與行人發生的事故數量就達53558起,占總交通事故數量的21.63%[3]。準確識別行人的過街意圖,幫助駕駛員制訂更加合理的駕駛策略,對行人事故的減少具有重要意義。
針對上述問題,本文選取了一段無信號燈的人行橫道路段作為研究對象,利用激光雷達和高清攝像機對該路段行人—車輛的交互數據進行了采集,包括行人特征參數、行人過街數據以及與行人過街存在交通沖突的相關車輛的行駛數據等。基于所采集到的數據,本研究分析行人過街時的行為特征,并確定了與行人過街意圖相關的的特征參數,基于分析結果建立了基于隨機森林機器學習方法的行人過街意圖預測模型,對路側行人是否過街進行了準確判斷。
一、試驗數據采集
行人過街包括有信號燈有人行橫道路段、無信號燈有人行橫道路段和無信號燈無人行橫道路段3種情況,由于有信號燈有人行橫道路段行人的過街意圖較為明顯,故本文僅對后兩種路段進行數據采集。
將激光雷達和攝像頭安裝在車上進行行人過街數據采集,存在實驗周期長,需要大量的人力物力且實驗結果容易受到駕駛人駕駛風格的影響等問題,故本文采用在路側進行行人過街數據采集實驗,該方法具有采集到的樣本量大,駕駛員駕駛風格全面且省時省力等優點。
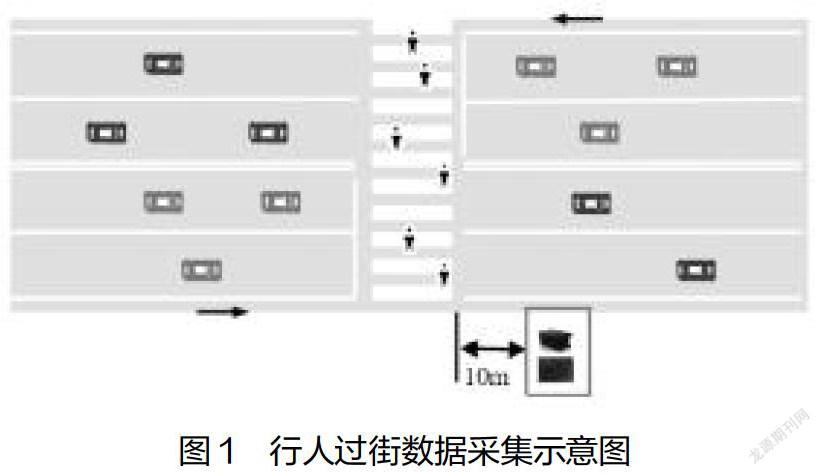
如圖1所示,將激光雷達和高清攝像頭安裝在路側距離人行橫線10m處對行人過街數據進行采集,其中紅色車輛為與過街行人存在交通沖突的車輛。
本文選取西安市碑林區文藝南路某人行橫道處作為試驗路段,一段時間內試驗路段由于重新鋪裝導致人行橫道線被覆蓋,故本文所采集的數據包括無信號燈有人行橫道路段和無信號燈無人行橫道路段兩類。試驗路段為雙向四車道,道路中間為雙黃線,限速60km/h,路面寬度約11m,人行橫道寬5.5m。
本文試驗設備主要為ibeo LUX 4線激光雷達和高清攝像頭。ibeo LUX 4線激光雷達探測距離可達200m,水平視角為110°,垂直視角3.2°,距離分辨率為4cm,測量精度滿足試驗需求;高清攝像頭為高清智能行車記錄儀,用來采集行人過街時行人與車輛的博弈過程,輔助激光雷達數據的采集和挑選。
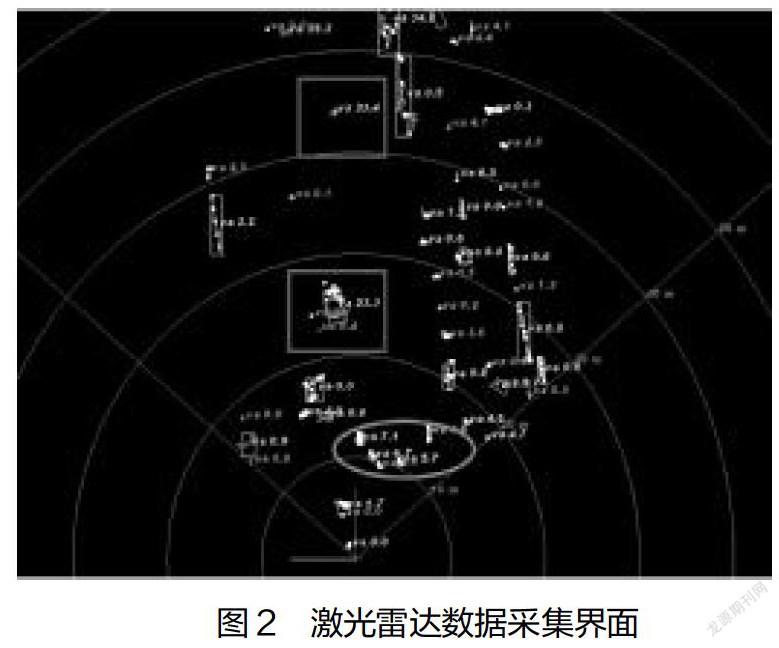
如圖2所示,紅色橢圓部分為行人的激光雷達點云數據,方框部分為與過街行人存在博弈的車輛的激光點云數據,此時車輛的速度為23.3km/h,與行人距離為24m,此時行人采取直接過街的決策。
通過數據挑選,本文可采集到行人性別、行人年齡分布、行人過街策略(等待過街/直接過街)、車輛行駛速度和車輛距離行人縱向距離等信息,如表1所示。
二、行人過街特性分析
在人—車混行的交通環境中,行人隨機性較大,給駕駛員的駕駛策略選擇,尤其是智能駕駛輔助系統的設計帶來了極大考驗。對混行交通模式下行人過街特性進行分析,對智能駕駛輔助系統的設計有十分積極的影響。
行人完整的過街過程可以分為6個步驟:過街位置選擇、過街觀察、過街環境感知、過街條件判斷、過街決策、實施過街行為,其中,可根據不同路況及不同的過街條件重復或省略部分步驟。
有研究表明,性別和年齡是影響行人過街決策的重要因素,故本文將研究不同年齡和性別對行人過街特性的影響。本文共采集了5432組不同年齡、不同性別的行人過街數據進行行人過街特性的分析。
數據顯示,行人過街時速度基本分布在0—8.0km/h范圍內,平均速度為2.82km/h,標準偏差為1.681km/h,數據分布范圍相對集中。女性過街時速度要略小于男性過街時的速度。造成這種結果的原因可能是男性在生理結構相較于女性更具有優勢,且男性心理上承受的安全閾值更低,更具有冒險精神。從圖中還可以看出,不論是男性還是女性都存在個別過街速度較大的行人,說明在行人過街時,存在一小部分行人與車輛博弈較為激烈,試驗結論與我們的認知保持一致。
為研究不同年齡對過街行為的影響,本文將行人為分為3類,即青年(15—30歲)、中年(30—50歲)和老年(50歲以上)。實驗結果表明,老年人的速度最低,且相對更為集中,青年和中年的行走速度相對較快且分散程度較大。試驗結論與人類認知基本吻合,不同年齡段行人的心理變化以及生理條件對過街速度的影響較為明顯。
車輛的行駛速度及車輛與行人之間的距離是影響行人制訂過街策略的重要因素。碰撞時間TTC(Time-To-Collision)能夠將兩者很好地結合起來,并普遍應用于車輛碰撞預警系統中。故本文在研究行人過街與行駛車輛的博弈問題時,TTC也是一項較為有研究價值的影響因素。在此情景下,可將過街行人模擬為跟車碰撞預警模型中的“前車”,此時行人的縱向速度可忽略不計,僅考慮橫向速度。
不同過街策略下TTC對比結果顯示,TTC對行人過街策略具有較大影響,當TTC較小時,行人往往采取等待過街的策略,此時TTC位于2.1—3.9s范圍內。當TTC較大時,即TTC大于4.4s時,行人往往會采取直接過街的決策。
通過上述分析可以看出,行人性別、年齡以及碰撞時間TTC都對行人過街的決策具有較大影響,故車載行人預警系統在設計時要綜合考慮這幾個影響因素,以便制訂出更加合理的預警算法,提高預警系統的準確率和接受度。
三、行人過街意圖預測模型
對路側行人是否過街進行準確預測對于提高駕駛輔助系統的安全性和準確率具有非常重要的意義。
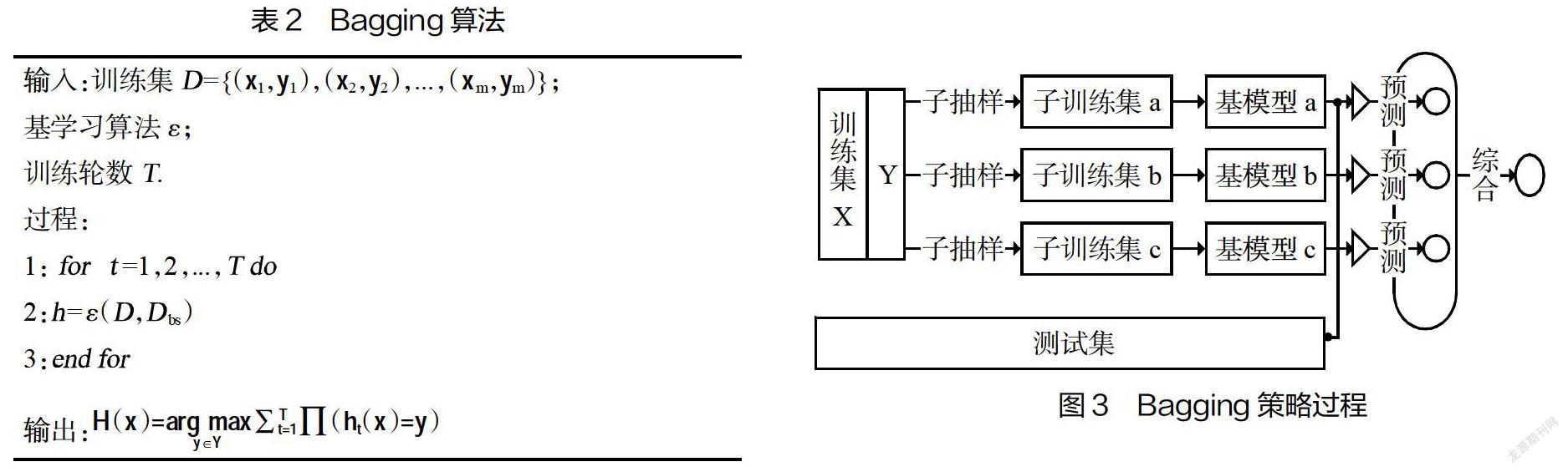
本文選取了隨機森林機器學習算法對行人過街意圖進行預測,算法具有效率高、可靠性高和魯棒性強等特點。隨機森林算法是將決策樹用作bagging中的模型,實際上是一種bagging方法。首先,m個不同的訓練集應用bootstrap方法來產生,每個不同的訓練集生成一顆決策樹,在節點上尋找特征分裂時,一部分特征隨機被抽取,找到最優解,應用于節點上實現分裂。由于bagging的思想,所以隨機森林實質上是對樣本和特征都進行了采樣,很好地解決了過擬合問題[4]。
Bagging算法是一種高效的算法,能適用于多分類和回歸等任務[5]。策略過程如圖3所示。
調用MATLAB函數TreeBagger,建立隨機森林模型,然后對對數據進行訓練。
Model=TreeBagger(ntree,train_data,train_label,‘Method’,‘classification’)
其中,train_data指訓練的樣本數據;train_label指訓練樣本數據對應的類別標簽,本文指等待過街或直接過街兩種行人過街策略。
構建好模型之后,帶入predict函數和待預測數據集就可得出預測結果。
[predict_label,scores] = predict(Model, test_data)
其中,test_data是待預測數據;predict_label指預測結果;scores為概率分布。
本文分別針對無信號燈有人行橫道路段和無信號燈無人行橫道路段兩類路段進行了預測。
(一)無信號燈有人行橫道路段
當有人行橫道時,本研究共篩選出2376組行人過街與車輛存在沖突博弈的數據,將數據集分為1900組訓練集及476組訓練集,進行隨機森林模型訓練預測。此時模型整體準確率為96.43%,即該模型在無信號燈有人行橫道路段能夠準確地識別行人的過街意圖,可用于車載行人預警系統的設計和優化。
(二)無信號燈無人行橫道路段
當無人行橫道時,本研究共篩選出1248組行人過街與車輛存在沖突博弈的數據,將數據集分為1000組訓練集及248組訓練集,進行隨機森林模型訓練預測,此時模型整體準確率為91.43%,即該模型在無信號燈無人行橫道路段仍能夠準確地識別行人的過街意圖,可用于車載行人預警系統地設計和優化。
參考文獻:
[1] 程如中,趙勇,王執中,等. 實時行人檢測預警系統[J]. 交通運輸工程學報,2012,12(05):110 -118+126.
[2] 公安部交通管理局. 中華人民共和國道路交通事故統計年報[R]. 北京:公安部交通管理局,2019.
[3] 韓亞雄,霍月英. 交叉口行人過街交通特性研究——以呼和浩特市為例[J]. 交通工程,2021,21(01):22-26+32.
[4] 呂紅燕,馮倩. 隨機森林算法研究綜述[J]. 河北省科學院學報,2019,36(03):37- 41.
[5] 王小川,史峰,郁磊,等. MATLAB神經網絡43個案例分析[M]. 北京:北京航空航天大學出版社,2013.
(薦稿人:郭應時,長安大學教授)
(責任編輯:鄒宇銘)
猜你喜歡
電子技術與軟件工程(2016年22期)2016-12-26 21:36:42
時代金融(2016年27期)2016-11-25 17:51:36
科教導刊(2016年26期)2016-11-15 20:19:33
活力(2016年8期)2016-11-12 17:30:08
科學與財富(2016年28期)2016-10-14 21:19:17
電腦知識與技術(2016年20期)2016-08-19 18:49:49
電腦知識與技術(2016年12期)2016-06-14 00:45:31
科教導刊·電子版(2016年10期)2016-06-02 19:17:03
科教導刊·電子版(2016年10期)2016-06-02 18:04:11
電腦知識與技術(2016年3期)2016-04-07 16:12:55
