融合多特征因素的像素級裂縫檢測
2021-12-01 05:26:34賀福強紀家平
智能計算機與應用 2021年8期
關鍵詞:檢測
謝 丹,賀福強,何 昊,紀家平
(貴州大學 機械工程學院,貴陽550025 )
0 引言
混凝土建筑結構中裂縫所產生的危害極大,主要有滲漏危害、碳化危害以及腐蝕危害等[1]。例如:中國柘溪大頭壩、江蘇無錫橋梁、意大利斯塔弗大壩坍塌等[2]。為了減少此類事故的發生,工程中常利用監測采集手段,捕捉裂縫信息,根據檢測到的信息,及時研究混凝土裂縫的成因,并修補危害性較大的裂縫[3]。
目前,許多基于圖像處理的自動裂縫無損檢測方法已被提出,并應用于工程檢測中。由于裂紋與背景之間存在明顯的強度差異,強度閾值分割是最常用的方法。文獻[3]中提出,利用形態濾波器預處理圖像,通過基于熵的閾值分割檢測確定裂縫;文獻[4]中提出移動平均自適應閾值分割方法,通過全局尺度的圖像灰度均值與局部裂縫的線性關系,確定自適應閾值實現裂縫的分割。從特征檢測上來說,文獻[5]中,通過分析裂縫輪廓的長度和曲率,初步判別裂縫邊緣,隨后采用模板搜索方法檢測真實裂縫。文獻[6]中通過對裂縫脊邊緣特性分析,采用高斯函數及導數,檢測脊邊緣的原理進行推導,基于最小生成樹算法連接斷裂裂縫。上述算法的優點是檢測快速,在良好的條件下,檢測結果一般合理可靠。但在光照條件不均勻、紋理背景復雜的情況下,噪聲仍然是要面臨的艱巨挑戰。
近年來,一些研究人員專注于像素分類,以實現裂紋分割。在文獻[7]中,提出了基于自由形式各向異性(FFA)的像素級裂紋檢測方法;文獻[8-9]中選擇端點的最小路徑,以代價函數為約束條件檢測裂紋。該方法提高了實時性和抗干擾性能,通過將像素與其周圍的上下文信息相結合,像素級檢測算法在裂縫的一般拓撲紋理中表現出魯棒性和可用性。然而,受自然環境因素影響的基礎設施裂縫,往往伴隨著滲水、混凝土表面剝落等情況。由于裂紋與這些擾動具有相似的強度值,因此在特征提取時,則會有大量的錯誤區域信息被帶入。事實上,如何實現高效、全局、準確的自動裂紋檢測,仍然是一個艱巨的挑戰。
本文提出了一種基于最小路徑的像素級裂紋檢測方法。通過分析不同尺度裂紋的特征,成功地將全局尺度裂紋的連通性和像素級像素特征的差異結合起來。優化了FFA 方法,提出了一種融合多特征的像素級裂紋檢測算法。
1 基于紋理測度的FFA 裂縫檢測
裂縫是不規則的連續線狀結構,根據整體建筑結構表面破損程度的差異,不同位置上的裂縫呈現不同的灰度強度,且裂縫具有一定的方向性。圖像背景周邊與裂縫主導方向上有明顯的對比度差異,這種局部范圍內,主導方向上紋理特征的顯著性為檢測裂縫目標提供了強有力的依據[10]。文獻[11]中提出基于圖形理論自由搜索不同方向上的最小路徑(如圖1),利用自由形式路徑上的紋理特征,凸顯裂縫主導方向上的顯著性。根據紋理自由形式各向異性原理(Free-Form Anisotropy,FFA)可知,在自由形式路徑上裂縫主導方向的紋理特征,能突出顯現裂縫的特征信息。
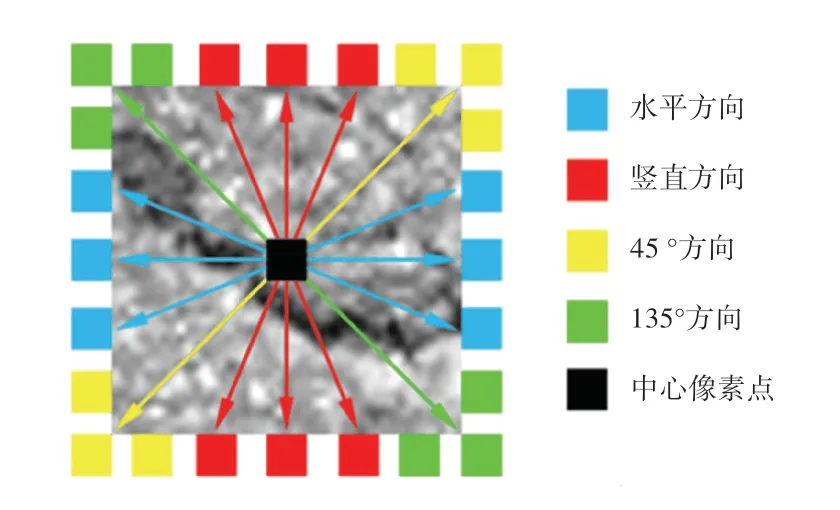
圖1 自由形式路徑方向上紋理特征提取Fig.1 Texture feature extraction in free form path direction
利用FFA 裂縫檢測原理,不同紋理測度對圖像中的裂縫結構進行檢測,實驗結果如圖2 所示。其中,Ground Truth 為根據裂縫真實寬度繪制的裂縫提取圖。從圖中可見,FFA 對圖像背景噪聲有一定的抑制作用,提高了背景與裂縫的對比度。但在此次裂縫檢測實驗中也發現,FFA 在增強裂縫結構的同時,融入了裂縫邊緣周邊的背景像素點,拓寬了裂縫的寬度。從圖3 中可以看出,當裂縫主導方向上出現干擾情況時,FFA 測度會將地面或墻面圖像(非裂縫處)①誤檢為裂縫②。
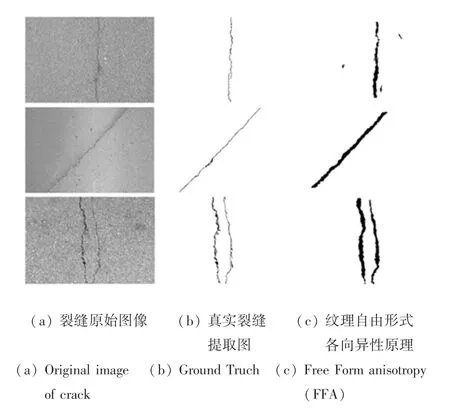
圖2 FFA 描述裂縫結構Fig.2 FFA describes the fracture structure
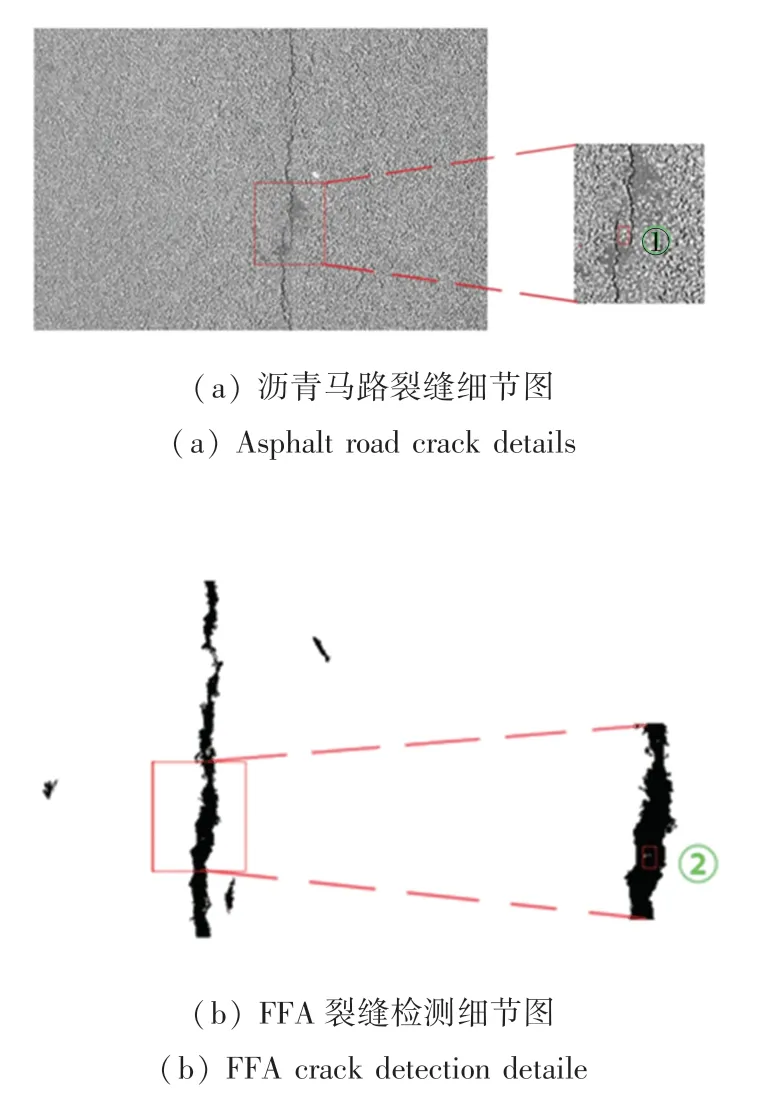
圖3 FFA 裂縫檢測缺陷Fig.3 FFA crack detection defect
在描述裂縫結構的過程中,FFA 測度出現融入裂縫邊緣背景非裂縫點情況的主要問題,在于該方法忽略了裂縫點本身顯著的灰度強度特征,以及裂縫邊緣梯度變化,只考慮了圖像像素點各方向最小路徑上紋理一致性程度。為了準確地檢測出裂縫點,本文提出結合鄰域信息的最小路徑像素級裂縫檢測方法,實現了融合裂縫的灰度強度特征測度PI,以及邊緣梯度特征測度PG的多特征描述裂縫特性的方法。
2 基于最小路徑的像素級裂縫檢測方法
2.1 像素灰度強度特征PI 測度
裂縫檢測中最突出、最易識別的特征之一就是灰度強度。裂縫的灰度強度與圖像背景的灰度強度存在明顯差異,但僅靠圖像灰度強度差異,對識別裂縫有一定的局限性,需要提高像素點在局部范圍內的辨別度。若將周圍環境的紋理與像素本身的灰度特性相結合,以更寬闊的視野來描述像素點的灰度強度特征,可提高像素點在局部范圍內的辨別度。根據FFA 紋理測度方法可知,在不同方向上最小路徑的權值差異,反映了圖像像素中周圍區域的灰度強度變化程度。當FFA 測度越大時,該點不同方向上的紋理結構差異則越大,灰度強度變化越明顯;反之,說明該點周邊區域紋理相似,灰度強度比較均勻。本文提出采用像素點最小路徑中最小權值和最大權值的比率作為波動因子,調節像素點灰度強度特征,增強裂縫點與背景點之間的對比度。
在基于自由形式紋理各向異性方法上,搜索像素點各方向上長度為d的延伸路徑,路徑中心為其中心像素點。將同一方向上的延伸路徑合并,得到各方向上長度為2d-1 的最小路徑,記為Pj。其中,j表示方向,分別取值為0°、45°、90°、135°。儲存最小路徑Pj上各像素點(其中,i為最小路徑Pj上第i個像素)的灰度值。計算Pj中最小權值與最大權值的比值,并作為中心像素的調節系數,得到像素級灰度強度特征PI:
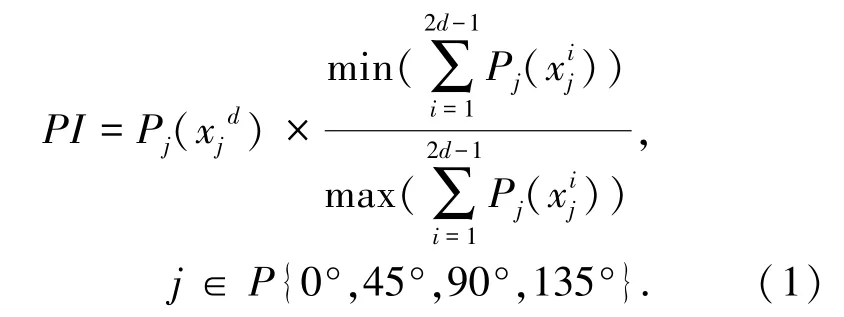
裂縫點的紋理各向異性的一致性程度低,圖像灰度權值最小處延伸路徑方向與裂縫生長方向一致,而灰度權值最大處延伸路徑沿著圖像背景方向生長。由公式(1)計算可得,裂縫點本身灰度強度低,則裂縫點的波動因子遠小于1,導致強度縮減;背景點紋理各向異性一致性程度高,則其波動因子趨近于1,調節后其強度值基本保持不變,且裂縫和背景的區分度更為明顯。
2.2 像素邊緣梯度特征PG 測度
由于裂縫全局灰度不一致以及裂縫周邊表皮脫落和滲水等噪聲影響,裂縫邊緣呈現多種形式,基于單一形式的邊緣檢測方法識別裂縫結構的效果不佳。通常邊緣檢測算子(如Sobel 算子[12]、Canny 算子[13]以及Prewitt 算子[14]等)對于單一紋理、噪聲少、對比度高的圖像,識別效果理想。但由于道路或墻面等混凝土建筑結構裂縫周邊紋理復雜多變,多種多樣的邊緣形式,使用常規邊緣檢測方法檢測裂縫邊緣,會出現不同程度的偏差。通常檢測算子的共性,都是根據少量像素強度變化,描述物體邊緣的梯度特征,基于邊緣兩側局部鄰域像素內的灰度信息確定物體邊緣的梯度,其適用范圍受到很大局限。
通過延伸式搜索和統計分析,得出自由形式紋理各向異性方向上的紋理結構,更具代表性地反映出像素的特征。本文結合最小路徑上的紋理結構,提出像素級的梯度測度,以像素本身灰度信息與周邊環境的相似性,來確定裂縫與背景的分割線。像素點最小路徑由同一方向上的兩條延伸路徑合并而成,本文將最大權值路徑Pmax和最小權值路徑Pmin由中心像素P(xd)拆分為4 條延伸路徑,并進行統計分析,如圖4 所示。
圖4 裂縫點的路徑示意圖Fig.4 Path diagram of crack point
由于最大權值路徑Pmax具有抑裂縫性,最小權值路徑Pmin具有親裂縫性,所以裂縫點的Pmin路徑總是沿著裂縫方向,Pmax路徑則背馳裂縫,朝著背景區域生長。根據像素邊緣梯度的計算原理,需將鄰域像素灰度差異轉化為路徑均值與中心像素灰度的相似度。首先,根據紋理測度FFA 方法,搜索出像素點Pmax和Pmin方向上長度為d的延伸路徑,求出延伸路徑上的像素點灰度均值。然后對比延伸路徑的均值,選取出Pmax中較大者和Pmin中較小者,最后得出路徑均值與中心像素灰度的相似度,運用公式(2)得出像素點的梯度測度PG:
若檢測像素為裂縫鄰近區域的背景點,則該點較大的延伸路徑均值與本身灰度相似性高,較小的延伸路徑均值與本身灰度相似性低,故其梯度測度PG?1。若檢測像素為裂縫邊緣點,則該點較大的延伸路徑均值與本身灰度相似性低,較小的延伸路徑均值與本身灰度相似性高,故其梯度測度PG?1。在實驗過程中可得,裂縫整體的梯度測度具有較高的辨別度,雖存在個別噪聲像素點的干擾,但整體性能穩定,檢測效果良好。
2.3 融合多特征的裂縫提取
像素級灰度強度特征、像素級邊緣梯度測度以及像素點的紋理結構各向異性,從不同角度有效地描述出裂縫的顯著性。強度特征突出了裂縫整體在圖像全局內的辨別度、梯度測度和紋理結構各向異性刻畫了裂縫點在局部區域的對比度。為了從復雜背景紋理的橋梁裂縫圖像中準確提取出裂縫,同時兼顧算法的實時性能,本文將兩種裂縫特征描述子進行融合,取其精華去其糟粕,結合各描述子的優點對像素點進行檢測。根據像素級灰度強度描述子判斷像素點與裂縫之間的空間距離,剔除相隔較遠的絕大部分背景點,減少了算法的運算量。基于像素級邊緣梯度測度描述子,確定裂縫與鄰域背景的分界線,像素點的紋理結構各異向性描述子,用于抑制孤立噪聲點的干擾。像素點檢測算法總體框架流程如圖5 所示。
圖5 裂縫檢測流程圖Fig.5 Flow chart of crack detection
3 方法驗證
本文提出的最小路徑像素級裂縫識別算法由MATLAB r2020b 軟件編程語言實現,所有實驗均在配置為Intel(R)Xeon(R)CPU E5-1630v4@ 2.80GHz 2.80GHz 和8GB RAM 的PC 機上進行。為了客觀地評價所提算法的性能,分別與基于自適應濾波方法AFM、基于像素級檢測方法的MPS[12]和FFA[11]進行了對比實驗。實驗所使用的裂縫圖像來源于瀝青馬路裂縫AigleRN 數據集和墻面裂縫ESAR 數據集。AigleRN 數據集由38 張分辨率為991×462 的圖像組成,ESAR 數據集由15 張分辨率為768×512 的圖像組成。這些圖像數據集中含有大量的光照不均勻、油斑、滲水、混凝土表皮脫落等噪聲,對裂縫檢測算法提出了極大的挑戰。
在AigleRN 數據集ESAR 數據集上選取具有代表性的裂縫圖像進行對比實驗,圖6 和圖7 展示了各對比算法的可視化測試結果。從圖6 和圖7 中可以直觀地觀察到,AFM 算法檢測到的裂縫邊緣區分不明顯,背景噪點難以剔除掉,對噪聲過于敏感,容易產生較明顯的誤差;FFA 方法檢測部分裂縫鄰近區域像素點誤判為裂縫點,導致裂縫寬度增加;MPS算法的檢測結果存在較多毛刺,對于噪聲較為敏感,裂縫容易斷裂,導致裂縫提取不完整。本文所提算法提取的裂縫結構連續且平滑,抑制噪聲能力強,能準確區分裂縫與背景,檢測效果好。
圖6 AigleRN 數據集上的對比實驗Fig.6 Comparison experiment on aiglern data set
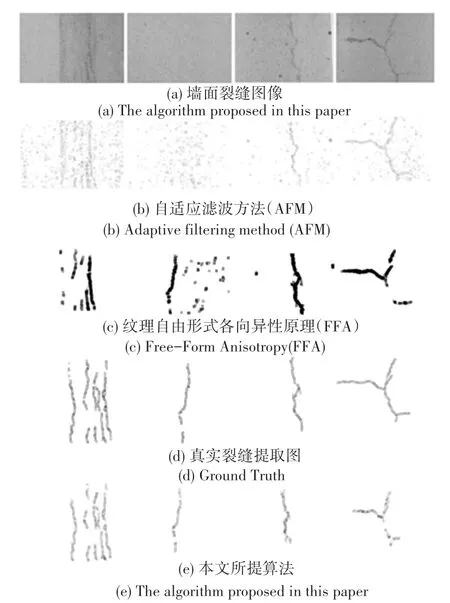
圖7 ESAR 數據集上的對比實驗Fig.7 Comparative experiment on Esar data set
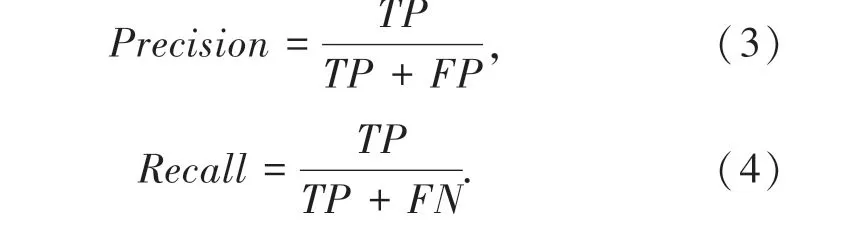
為客觀評估所提算法檢測裂縫的有效性,將檢測結果與人工標識的Ground Truth 裂縫圖像進行了比較。設:正確檢測為裂縫的像素為真陽性(True Positive)TP,正確檢測為背景的像素為真陰性(True Negative)TN,錯誤檢測為裂縫的像素為假陽性(False Positive)FP,錯誤檢測為背景的像素為假陰性(False Negative)FN。則算法檢測結果的精確率(Precision)和召回率(recall)可表示為:
本文將各算法在AigleRN 數據集和ESAR 數據集的圖片進行了統計。表1 統計的實驗數據分別為各算法(除自適應濾波AFM 算法外)檢測圖6 和圖7 中裂縫圖像的檢測結果。
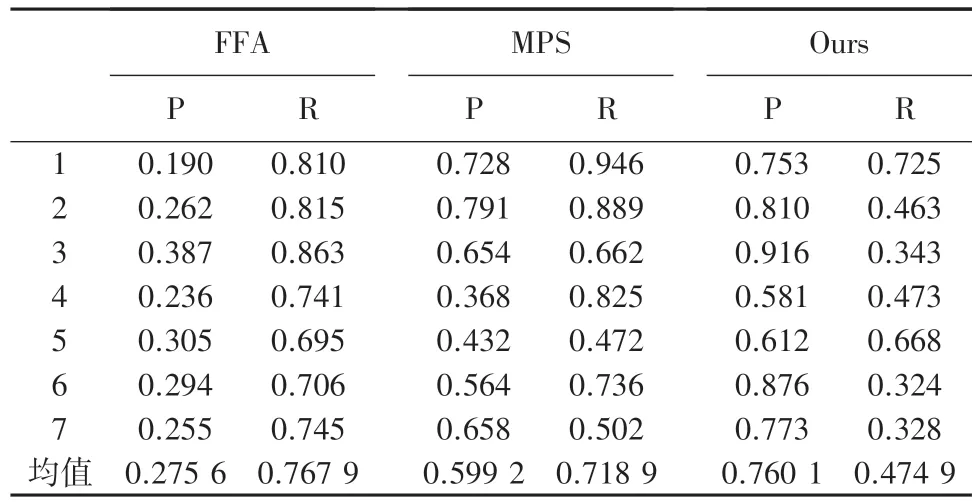
表1 AigleRN 數據集上的實驗對比結果Tab.1 Experimental comparison results on aiglern data set
在對圖像進行像素級逐一客觀、科學的定量分析中,對比算法在各數據集上的檢測結果,從圖8 及圖9 中可以直觀地看出,本文所提算法應對多種不同紋理結構的裂縫圖像均表現出良好的性能,識別裂縫的精準率更高,檢測結果更加接近真實裂縫。為保證裂縫與背景準確劃分,但還存在召回率未達到最佳期望值且不穩定的問題,但差距甚微,對于目前裂縫檢測算法已有較大提升。
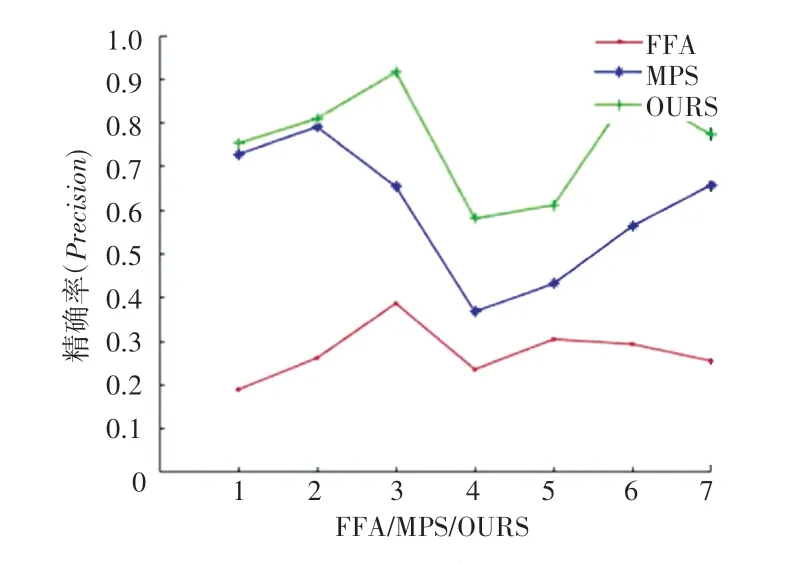
圖8 基于FFA/MPS/OURS 算法邊緣檢測的精準率Fig.8 Accuracy of edge detection based on FFA / MPS / ours algorithm
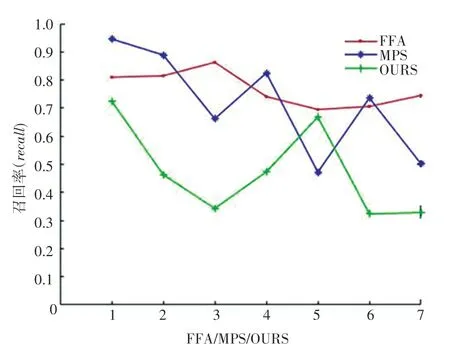
圖9 基于FFA/MPS/OURS 算法邊緣檢測的召回率Fig.9 Recall rate of edge detection based on FFA / MPS / ours algorithm
4 結束語
為了解決現有裂縫分割算法存在拓寬實際裂縫的寬度引起測量誤差、易丟失部分低對比度低淺層裂縫等問題,提出基于紋理各異向性的最小路徑像素級裂縫識別方法。通過分析裂縫的紋理和結構,提出基于紋理各異向性的像素級強度和梯度特征,融合多特征裂縫檢測。最后在兩個具有挑戰性的公共裂縫圖像數據集上進行實驗驗證。實驗結果表明:所提算法在保證裂縫檢測效果具有較高精確度的前提下,有效提高了檢測效率,算法能擁有較高的精準率和較低的召回率,平均精準率能達到60%以上,整體性能良好。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
