采用混合遺傳算法的敏捷衛(wèi)星自主觀測任務規(guī)劃
2021-12-13 02:03:26高新洲郭延寧馬廣富張海博李文博
哈爾濱工業(yè)大學學報 2021年12期
關鍵詞:規(guī)劃
高新洲,郭延寧,馬廣富,張海博,李文博
(1.哈爾濱工業(yè)大學 航天學院,哈爾濱 150001; 2.北京控制工程研究所,北京 100190)
敏捷對地觀測衛(wèi)星(agile earth observation satellite, AEOS)擁有良好的姿態(tài)機動能力,在民用和軍用領域都有著廣闊的應用前景,比如環(huán)境保護、國土普查、抗震減災以及制空權、制天權、制海權等。在AEOS的運行過程中,對AEOS提前根據(jù)目標點特性進行任務規(guī)劃至關重要,可有效發(fā)揮AEOS性能,獲取更多的觀測收益[1]。而在任務規(guī)劃過程中,AEOS需要對多個目標點進行規(guī)劃,同時也要考慮到衛(wèi)星在觀測過程中所面臨的多種狀態(tài)、控制等復雜約束條件,因此,國內外越來越多的學者開始進行衛(wèi)星任務規(guī)劃方面的研究。
Michel等[2]提出了對點目標以及區(qū)域目標的分割和觀測方法,綜合分析了時間約束、姿態(tài)機動約束、存儲容量和能量的約束,同時考慮到了天氣的不確定性,并提出了相應的優(yōu)化目標函數(shù)。他們分別對比了貪婪算法、動態(tài)規(guī)劃算法、局部搜索算法這幾種算法的求解效率。趙琳等[3]對敏捷衛(wèi)星的單星單軌任務規(guī)劃問題進行了研究,引入了任務—姿態(tài)協(xié)同規(guī)劃思想,并根據(jù)任務—姿態(tài)協(xié)同規(guī)劃數(shù)學模型設計了自適應偽譜遺傳算法(APGA),用以求解滿足調整時間最優(yōu)的任務規(guī)劃問題。耿遠卓等[4]利用團劃分算法對多個點目標進行了聚類,考慮了衛(wèi)星的時間窗口約束以及最大加速度約束,在傳統(tǒng)的蟻群算法的基礎上引入了啟發(fā)式尋優(yōu)策略和新的信息素更新策略,加快了算法的收斂性。丁祎男等[5]面向單星的任務規(guī)劃問題,在綜合分析遺傳算法與禁忌搜索算法優(yōu)缺點的基礎上,提出了遺傳禁忌混合算法,該算法能夠解決算法的早熟問題,同時能夠加快算法收斂速度。王海蛟等[6]針對敏捷衛(wèi)星的調度問題,采用了二進制與實數(shù)雜合的編碼方式,將量子優(yōu)化機制引入了遺傳算法中,提出了改進的量子遺傳算法,提高了搜索效率。Tangpattanakul等[7]針對單星的任務規(guī)劃問題,提出了一種基于知識的多目標局部搜索方法(IBMOLS),該方法實質上是局部搜索算法與遺傳算法的綜合方法,能夠比遺傳算法更快地收斂。Chu等[8]研究了由低分辨率和高分辨率的衛(wèi)星組成的雙星任務規(guī)劃問題,對雙星協(xié)同任務規(guī)劃問題進行建模,提出了分支限定的求解方法。Lee等[9]面向多星任務規(guī)劃問題,主要考慮了衛(wèi)星能源以及存儲容量的約束,利用遺傳算法進行求解,就不同的應用場景進行了仿真。Zheng等[10]將多星的星上任務規(guī)劃問題建模為約束優(yōu)化問題,同時在現(xiàn)有的用于衛(wèi)星任務規(guī)劃的遺傳算法的基礎上,提出了求解速度更快的混合動態(tài)變異遺傳算法(HDMGA)。黃生俊等[11]對知識定義、知識更新規(guī)則和任務沖突處理策略做了詳細描述,并綜合蟻群算法的反饋特性和模擬退火算法的局部搜索特性,設計了一種基于知識的改進模擬退火算法。何磊等[12]考慮了光學成像敏捷衛(wèi)星中的云層遮擋問題,采用了預判和二分法進行云層遮擋時間窗口的計算,并針對這一問題提出了相應的蟻群算法進行求解,提高了光學成像衛(wèi)星的成像效率。Tipaldi等[13]結合了規(guī)劃系統(tǒng)和動態(tài)重規(guī)劃的能力深入分析了馬爾科夫決策過程(MDP)模型的自主規(guī)劃方法,驗證了該方法在實際應用中的性能。郝會成等[14]將免疫遺傳算法與蟻群算法等相結合,提出了基于混合遺傳求解算法,同樣提高了算法的求解速度。Xu等[15]考慮了衛(wèi)星的資源約束條件,在此基礎上提出了基于優(yōu)先權的結構算法,用于最大化觀測收益。董軒鴻[16]研究了對觀測目標的條帶劃分策略,設計了改進的遺傳算法。
綜合來看,目前已有很多文獻應用遺傳算法等智能優(yōu)化算法來解決衛(wèi)星的任務規(guī)劃問題[3,5,7,10]。雖然應用遺傳算法可以求解出衛(wèi)星的最優(yōu)觀測序列,但是傳統(tǒng)的遺傳算法在交叉、變異等尋優(yōu)過程仍有許多值得改進的地方,因此有必要對遺傳算法的變異過程做出改進,進而提升算法的求解效率。同時,如果規(guī)劃問題的適應度函數(shù)過于簡單[17],往往不能真實地反映衛(wèi)星的實際觀測情況,因此有必要對適應度函數(shù)做出改進。
基于上述考慮,本文提出了禁忌退火遺傳混合算法,并將其應用于求解AEOS的任務規(guī)劃問題。首先提出了本文的適應度函數(shù).此函數(shù)綜合考慮了衛(wèi)星在觀測過程中的多種約束條件,能夠較為真實地反映衛(wèi)星的實際觀測情況。其次介紹了禁忌退火遺傳混合算法。此算法對遺傳算法的變異過程做出了改進,將禁忌搜索算法與模擬退火算法的尋優(yōu)過程的優(yōu)勢引入到了遺傳算法的變異過程,提升了遺傳算法的鄰域搜索能力,節(jié)省了算法的運行時間,適用于AEOS的任務規(guī)劃問題。
1 任務規(guī)劃問題建模
1.1 任務規(guī)劃問題描述
AEOS在運行過程中,主要通過橫滾軸和俯仰軸進行姿態(tài)機動。星上攜帶有攝像頭,可以對地面實施觀測任務。如圖1所示,衛(wèi)星沿滾動軸的最大姿態(tài)機動角度為θmax/2,沿俯仰軸的最大姿態(tài)機動角度為ξmax/2。當衛(wèi)星經過目標點上空時,需要提前對目標點的觀測序列做出規(guī)劃,得到滿足觀測約束下的最優(yōu)/次優(yōu)觀測序列。

圖1 AEOS觀測示意
衛(wèi)星觀測目標點時,會獲得相應的收益,在對單目標的持續(xù)觀測和目標間的姿態(tài)機動過程中,衛(wèi)星需要消耗一定能量。因此,構建的目標優(yōu)化函數(shù)必須綜合考慮觀測收益及觀測代價(即能量消耗),在滿足各種約束條件情況下,通過優(yōu)化算法獲得衛(wèi)星對目標點的觀測序列。
1.2 適應度函數(shù)的建立
定義如下變量:M為目標點集合,M={m1,m2,…,mn},其中mi為第i個目標點,n為目標點總數(shù);ttwsi為衛(wèi)星對mi可見的時間窗口的開始時間;ttwei為衛(wèi)星對mi可見的時間窗口的結束時間;tsi為衛(wèi)星對mi的實際開始觀測時間;tei為衛(wèi)星對mi的實際結束觀測時間;di為衛(wèi)星對mi的實際觀測的持續(xù)時間,即di=tei-tsi;trij為衛(wèi)星從觀測mi到觀測mj轉過的姿態(tài)機動角度;pi為mi的任務優(yōu)先級,pi取值越大,意味著mi的優(yōu)先級越高;wi為衛(wèi)星觀測mi獲得的收益,即wi=di·pi;posi=(lgti,lati)為mi的經、緯度坐標,其中l(wèi)gti為mi的經度;lati為mi的緯度,決策變量si和Fij的定義如下:
(1)
(2)
基于上述定義的變量,考慮如下適應度函數(shù):
(3)
上式表示的函數(shù)由觀測收益與衛(wèi)星姿態(tài)機動的能量消耗兩部分組成. 式中:si·wi為衛(wèi)星觀測某一目標點所帶來的收益,收益與目標點優(yōu)先級成正比;f1+si·di為衛(wèi)星觀測過程中消耗的能量,其中si·di為持續(xù)觀測某一目標點的能耗,f1為衛(wèi)星姿態(tài)機動的能耗,與衛(wèi)星姿態(tài)機動過程中勻加速與勻減速的時間Δt有關;η為衛(wèi)星的能耗系數(shù),是一個常數(shù)。Δt的計算方法如下。
本文假設衛(wèi)星在目標點之間姿態(tài)機動時,每個軸均以最大力矩Tmax進行機動,根據(jù)衛(wèi)星需要轉過的角度大小分為兩種情況考慮,如圖2的兩種情況所示。圖2(a)對應大角度機動情況,圖2(b)對應小角度的情況。
綜上所述,考慮f1為
(4)
式中,Δt為衛(wèi)星進行勻加速與勻減速過程的總時間。綜合式(3)、(4)可得
(5)
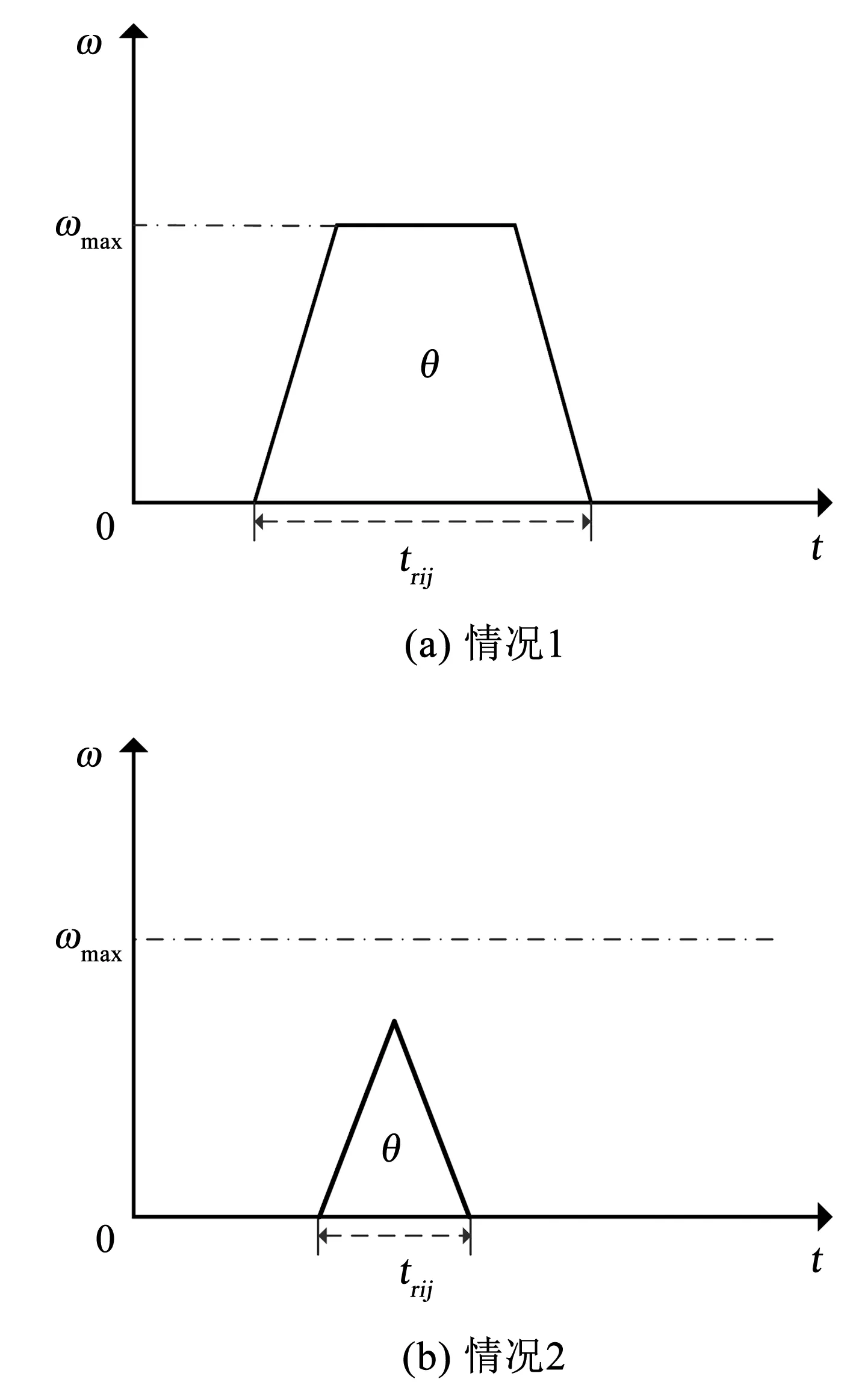
圖2 求解衛(wèi)星姿態(tài)機動角度示意
從式(5)可以看出,f取得最大值是本文的優(yōu)化目標,即在考慮到衛(wèi)星的能量消耗的情況下盡可能多地獲得觀測收益。
1.3 AEOS任務規(guī)劃的約束條件
下面給出AEOS任務規(guī)劃的約束條件。
如果目標點mi被觀測,那么觀測的持續(xù)時間區(qū)間必須被包含在衛(wèi)星對mi可見的時間窗口內,即
ttwsi≤tsi,ttwei≥tei,若si=1
(6)
衛(wèi)星結束觀測mi以后,必須在mj的時間窗口結束之前完成姿態(tài)機動才可以觀測mj,即
tsi+trij+di≤ttwej,若Fij=1
(7)
考慮如下衛(wèi)星軌道動力學約束:
(8)
以及如下衛(wèi)星姿態(tài)角約束、姿態(tài)角速度約束、姿態(tài)角加速度約束:
|θ|≤θmax,|ξ|≤ξmax
(9)
ωθ≤ωθmax,ωξ≤ωξmax
(10)
αθ≤αθmax,αξ≤αξmax
(11)
此外,還需要考慮如下衛(wèi)星姿態(tài)轉移時間約束:
trij=f(rs,posi,posj,Tmax)
(12)
式中,時間trij與兩個目標點的經緯度以及AEOS的最大機動力矩Tmax相關,計算方法如圖2所示。其中AEOS需要機動的角度θ的求解采用了文獻[17]的方法,如圖3所示。
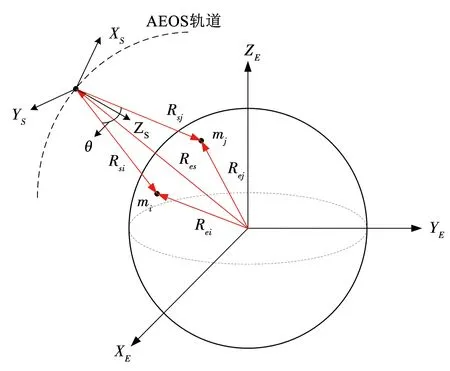
圖3 AEOS姿態(tài)機動角度的求解
在圖3中,Rei和Rej分別為mi和mj在地心慣性坐標系(ECI)中的坐標,具體公式為
(13)
式中:ω為地球自轉角速度,Re為地球半徑。
圖3中Res為衛(wèi)星在ECI中的坐標,可通過下式求得:
(14)
式中:Rs為衛(wèi)星的軌道半徑,Ω為升交點赤經,ψ為近地點幅角,α為衛(wèi)星轉過的角度,可由下式確定:
α=E+ωst
(15)
式中:E為衛(wèi)星開始觀測時刻的真近點角,ωs為衛(wèi)星的角速度,t為當前的時刻。
由圖3中可得下式
(16)
因此,衛(wèi)星從觀測mi姿態(tài)機動到mj所需轉動的角度θ可通過下式求得:
θ=arccos
(17)
綜合式(17)與圖2,即可最終求得衛(wèi)星的姿態(tài)機動時間trij。
2 禁忌退火遺傳混合算法
對于大規(guī)模的衛(wèi)星任務規(guī)劃問題,傳統(tǒng)的遺傳算法很難在較短的運算時間內給出最優(yōu)的觀測序列。因此,有必要對遺傳算法的尋優(yōu)過程做出改進。相對于傳統(tǒng)的遺傳算法變異方法,本文提出的禁忌退火變異方法能夠有效提高算法的求解搜索效率,節(jié)省算法的運行時間。
2.1 初始種群生成
本文采用整數(shù)編碼來解決衛(wèi)星的任務規(guī)劃問題。整數(shù)編碼與二進制編碼等其他編碼方式相比,能夠更直觀地表示衛(wèi)星的觀測序列,也便于算法搜尋鄰域解。
采用整數(shù)編碼方式的每個染色體(也稱作解、個體)分別代表一種可行的觀測序列。染色體上的每個基因所對應的數(shù)字即為目標點,如圖4所示。

圖4 整數(shù)編碼的染色體
圖4代表一條長度為6的染色體,表示衛(wèi)星需要觀測6個目標點,且最先5號目標點,最后觀測6號目標點。
設地面上目標點總數(shù)為n,AEOS需要從n個目標點中選取N個目標點進行觀測,種群規(guī)模為M。種群初始化的方法為,隨機生成M個觀測序列,其中每個觀測序列都是N個不大于n且互不重復的正整數(shù),即同一個目標點不會重復被觀測。在此后算法的每一次迭代過程中,都會首先計算種群中每一條染色體所對應的適應度函數(shù)值。
2.2 適應度函數(shù)計算
適應度函數(shù)值的大小是衡量種群中每個個體優(yōu)劣程度的重要指標。對于每一個給定的觀測序列,為了計算此序列所對應的適應值,需要首先確定衛(wèi)星能否依次觀測此序列所有的目標點。過程如下:
Step1比較當前的時間t與mi的時間窗口結束時間ttwei。如果t>ttwei,則mi無法被觀測,令si=0,i=i+1,繼續(xù)執(zhí)行step1。如果t Step2比較t與ttwsi。如果t>ttwsi,則執(zhí)行step3。如果t Step3計算trij。如果t+trij>ttwei,則mi無法被觀測,令si=0,i=i+1,執(zhí)行step1。如果t+trij Step4計算trij。如果t+trij Step5如果t+trij 從i=1起,重復執(zhí)行上述過程,直至i=N,即可得到每個觀測序列所對應的si以及Fij。將si、Fij以及關于每個目標點的wi等變量帶入式(5)即可求得每個觀測序列所對應的適應值的大小,每個個體的優(yōu)劣程度也就可以依次確定。 本文采用精英保留策略以及輪盤賭法對種群進行選擇、交叉操作。精英保留策略將第g代種群中的若干優(yōu)秀個體當做父本直接傳遞到第g+1代種群。隨后根據(jù)輪盤賭法從父本中選擇父本進行交叉運算,生成若干子代,使得第g+1代的種群規(guī)模為M。 輪盤賭法的計算過程如下所示: (18) (19) 式中:Fi為第i個父本對應的適應值,Qi為第i個父本被選擇的概率,Pi為從第1個父本直至第i父本的累加概率。其中,各父本按照適應度從大到小的順序排列。 第i個父本被選中參與交叉過程的方法如下:產生一個介于0和1之間的隨機數(shù)r,如果該隨機數(shù)滿足Pi-1 圖5 交叉操作 經過交叉操作得到的子代往往都含有相同的基因。比如圖5中,子代1的6和3都是重復出現(xiàn)的元素。因此,需要進行去重復操作,使每個子代的各個基因之間都兩兩互不重復。去重復操作是將每個子代中重復的基因隨機用沒有出現(xiàn)在該子代染色體中的基因替代,如圖6所示。 圖6 去重復操作 本文給出了禁忌退火變異(tabu search-simulated annealing mutation,TSSAM)。首先給出了禁忌搜索算法和模擬退火算法的相關定義;其次介紹了TSSAM的具體過程;最后分析了TSSAM對于傳統(tǒng)的變異方法的改進之處。 2.4.1 禁忌搜索算法 禁忌搜索算法(tabu search algorithm,TS)尋優(yōu)策略為,從初始解的鄰域解集中選取最優(yōu)解或者是未被禁忌的最優(yōu)解作為新的初始搜索解,直至算法收斂。禁忌搜索算法通過不斷更新禁忌表來避免在一個鄰域內重復搜索,進而提高算法的全局搜索能力,加快算法收斂速度。禁忌搜索算法的一些定義如下。 1)初始解。參與禁忌搜索的最開始的解,在本文中即為參與變異的個體x0。 2)鄰域解集。初始解x0的鄰域解構成的集合。對于采用整數(shù)編碼方式的染色體來講,鄰域解采用2-opt形式,即通過互換兩個基因位上的元素來產生鄰域解,如圖7所示。鄰域解集的規(guī)模與染色體的長度有關。 圖7 產生鄰域解 3)候選解。x0產生的鄰域解集中的最優(yōu)解或者是未被禁忌的最優(yōu)解,用于同x0比較,決定是否要用候選解替換x0。 4)禁忌表。用于記錄被禁忌的前若干次的操作。對于采用整數(shù)編碼的染色體來講,禁忌表是一個N×N的矩陣。其中N為染色體長度。禁忌表中第i行第j列的數(shù)字ai,j表示交換i,j兩個位置上元素的操作當前被禁忌的次數(shù)。如果禁忌表中該位置上元素為0,則表示此操作當前未被禁忌。在算法最開始的時候,禁忌表初始化為零矩陣。 5)禁忌長度。被禁忌的操作不允許被選取的最大次數(shù)。禁忌長度與染色體長度有關。禁忌長度記為Ltabu。 2.4.2 模擬退火算法 模擬退火算法(simulated annealing algorithm,SA)的尋優(yōu)過程為,假定一個著火物體,其溫度隨迭代過程指數(shù)下降。每次迭代時,在當前解的鄰域內隨機搜尋可行解,利用Metropolis法則判斷是否接受鄰域內可行解,循環(huán)此過程直至算法收斂。 1)退火溫度。SA中物體的溫度,記為T。物體的退火溫度T從初始溫度T0開始,隨迭代過程指數(shù)下降。 2)退溫率。物體的退火溫度的衰減速度K。物體溫度的退溫策略為T(n+1)=K·T(n),其中n為迭代次數(shù)。K滿足0 3)Metropolis法則。如果在當前解s0的鄰域內搜尋到的可行解s1優(yōu)于當前解,則以概率1接受s1作為新的當前解。如果s1劣于s0,則以一定概率p接受s1作為新的當前解。此概率p與當前的溫度T以及s1,s0適應值的差有關,計算公式如下: p=exp(ΔE/T) (20) 式中:ΔE為s1與s0適應度函數(shù)的差值,且ΔE<0;T為當前系統(tǒng)的溫度。 2.4.3 禁忌退火變異算法(TSSAM) 決定種群中某一個體是否參與變異的方法如下:生成隨機數(shù)r,如果變異率大于r,那么對當前個體執(zhí)行TSSAM操作。TSSAM步驟如下: Step1對于每一個參與變異的個體x0,首先產生此個體的鄰域解集。x0也稱作禁忌搜索的初始解。隨后將x0產生的鄰域解按照從優(yōu)到劣的順序進行排列,記最優(yōu)鄰域解為x1。先將x1作為候選解。 Step2將候選解x1與初始解x0進行比較。如果x1的適應度函數(shù)值大于x0,執(zhí)行step3。如果x1的適應值小于x0,執(zhí)行step4。 Step3將x1作為x0變異后的個體傳回到種群中,同時更新禁忌表。記由x0得到x1的方法為互換第i1,j1個基因位上的元素。更新禁忌表的方法為:對禁忌表中所有非零元素執(zhí)行如下操作: (21) 隨后考慮下一個參加變異的個體,執(zhí)行Step1。 Step4搜索x0的鄰域解集中未被禁忌的最優(yōu)解,將此最優(yōu)解記為新的候選解x2。將x0與x2的目標優(yōu)化函數(shù)值的差記為ΔE,ΔE<0。產生一個隨機數(shù)r,如果滿足exp(ΔE/T)>r,則接受x2作為變異后的個體傳回到種群中,同時更新禁忌表,隨后考慮下一個參加變異的個體,執(zhí)行step1。記由x0得到x2的方法為互換i2,j2基因位上的元素。更新禁忌表的方法為對禁忌表中所有非零元素執(zhí)行如下操作: (22) 生成隨機數(shù)r,如果滿足exp(ΔE/T) 重復執(zhí)行上述過程,直至種群完成變異。 當種群中的所有參與變異的個體變異完成以后,更新退火溫度,即令T(n+1)=K·T(n),開始種群下一代的迭代進化過程。 傳統(tǒng)遺傳算法的變異過程本質是從參與變異的個體的鄰域解集內隨機選擇一個解作為變異后的個體,而這一變異過程往往具有隨機性。與傳統(tǒng)的變異過程相比,TSSAM引入禁忌搜索算法中的鄰域解集,在鄰域解集中尋找可行解。如果變異個體的鄰域解集中的最優(yōu)解優(yōu)于此個體,那么接受最優(yōu)解為變異后的個體;反之,則通過Metropolis法則以一定概率接受未被禁忌的最優(yōu)解作為變異后的個體。 綜上分析,TSSAM兼具禁忌搜索算法與模擬退火算法的優(yōu)點,既能夠擴大解的搜索范圍,又能夠利用Metropolis法則提升算法的尋優(yōu)能力,極大改善了遺傳算法的變異過程,加快了算法的收斂過程。 本文設計的TSSAM算法的流程圖如圖8所示。 圖8 TSSAGA流程圖 本文通過仿真驗證了禁忌退火遺傳混合算法提出的禁忌退火遺傳混合算法在AEOS任務規(guī)劃問題中的有效性。 考慮AEOS如下參數(shù),見表1。 表1 衛(wèi)星參數(shù) 通過STK建立上述衛(wèi)星的場景,在場景中隨機生成若干個衛(wèi)星可見的目標點,并為這些目標點隨機指定1~10的任務優(yōu)先級。這些目標點的范圍為20°N~50°N,110°E~130°E。仿真時間從2020年3月24日04∶00∶00開始,到2020年3月25日04∶00∶00結束。通過STK可以解算出衛(wèi)星對目標點可見的時間窗口。 為了充分驗證算法的有效性,將禁忌退火遺傳混合算法(TSSAGA)分別與禁忌遺傳算法(TSGA)、退火遺傳算法(SAGA)以及普通的遺傳算法(GA)進行對比仿真實驗。 綜上所述,目前可確定的各算法參數(shù)見表2。 表2 確定的參數(shù) 本文設置了2組不同規(guī)模的對比仿真實驗來驗證TSSAGA在AEOS任務規(guī)劃中的性能。第1組實驗為從50個目標點中選20個目標點進行觀測,即染色體長度N=20。上文中未給出的各個算法其他參數(shù)見表3。 表3 未確定的參數(shù)(目標點個數(shù)∶50) 第2組實驗為從100個目標點中選50個進行觀測,染色體長度N=50。各算法其他參數(shù)見表4。 表4 未確定的參數(shù)(目標點個數(shù)∶100) 為了盡可能詳盡全面地比較算法的求解能力,每組對比實驗中,每種算法進行50次蒙特卡洛仿真實驗,隨后比較算法的平均適應度函數(shù)值以及算法達到收斂的總耗時。算法收斂的判斷標準為,連續(xù)15次迭代的最優(yōu)解相同。對50個目標點進行規(guī)劃的對比試驗結果見表5。 表5 任務規(guī)劃結果對比(目標點個數(shù)∶50) 為了進一步驗證算法的有效性,將每種算法分別運算10組,每組進行50次蒙特卡洛仿真實驗并取平均值,對比試驗結果如圖9所示。最優(yōu)的觀測序列見表6。對100個點進行規(guī)劃的對比實驗結果見表7。同樣地,將每種算法分別運算10組,每組進行50次蒙特卡洛仿真實驗并取平均值,對比試驗結果如圖10所示。最優(yōu)的觀測序列見表8。 圖9 算法對比結果(目標點個數(shù)∶50) 表6 任務規(guī)劃結果(目標點個數(shù)∶50) 表7 任務規(guī)劃結果對比(目標點個數(shù)∶100) 圖10 算法對比結果(目標點個數(shù)∶100) 表8 任務規(guī)劃結果(目標點個數(shù)∶100) 綜合表5與表7可知,求解相同規(guī)模的任務規(guī)劃問題,TSSAGA收斂最快,且收益高于其他算法。相比于GA,TSAG和SAGA節(jié)省了20%~30%的運算時間,TSSAGA節(jié)省了約40%的運算時間。相比于傳統(tǒng)遺傳算法的變異過程,TSSAGA在變異過程中引入了禁忌搜索的方法以及Metropolis法則,極大地提升了算法的搜索效率以及尋優(yōu)能力,節(jié)省了算法的收斂時間,有較高的工程應用價值。 1)面向敏捷對地觀測衛(wèi)星觀測大規(guī)模地面點目標這一實際工程問題,考慮了衛(wèi)星面臨的多種約束條件,建立了對應的適應度函數(shù)。 2)改進了傳統(tǒng)遺傳算法的變異過程,提出了禁忌退火變異方法,此方法兼具了禁忌搜索算法與模擬退火算法的有點,提高了整個算法的尋優(yōu)能力,加快了算法的收斂速度。 3)仿真結果表明,禁忌退火遺傳混合算法與傳統(tǒng)的遺傳算法相比,節(jié)省了約40%的算法優(yōu)化時間,大幅提高了智能優(yōu)化算法求解敏捷對地觀測衛(wèi)星任務規(guī)劃問題的求解效率。2.3 選擇、交叉操作


2.4 禁忌退火變異


3 典型AEOS任務規(guī)劃問題驗證
3.1 仿真參數(shù)設置



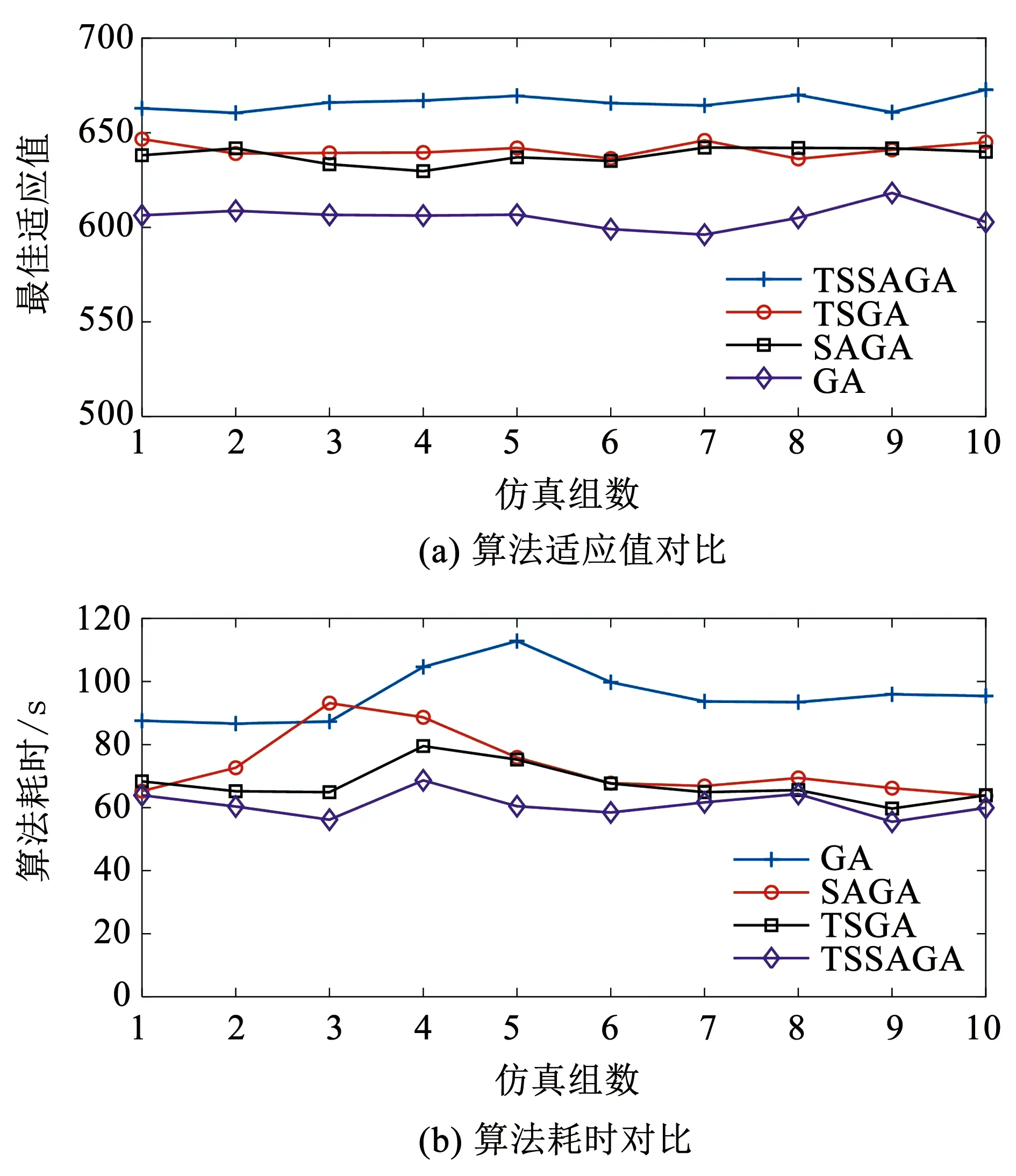
3.2 仿真結果分析






4 結 論
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46中國石油石化(2021年9期)2021-07-17 09:24:00中國農民合作社(2020年12期)2020-12-18 09:09:58公民與法治(2020年11期)2020-07-25 02:02:06河南水利年鑒(2020年0期)2020-06-09 05:43:30領導決策信息(2018年50期)2018-02-22 06:17:16商周刊(2017年5期)2017-08-22 03:35:26制造技術與機床(2017年3期)2017-06-23 08:11:34中國衛(wèi)生(2016年2期)2016-11-12 13:22:16華東科技(2016年10期)2016-11-11 06:17:41