深遠海養殖工船最小推進功率研究
2021-12-18 13:07:50陳作鋼
海洋工程 2021年6期
關鍵詞:方法
呂 磊,陳作鋼, 3,代 燚, 3
(1. 上海交通大學 海洋工程國家重點實驗室,上海 200240; 2. 上海交通大學 船舶海洋與建筑工程學院,上海 200240; 3. 高新船舶與深海開發裝備協同創新中心(船海協創中心),上海 200240)
深遠海養殖近年來獲得了廣泛的關注。在深遠海海域開展水產養殖,現代化、工業化、機械化的養殖裝備是關系到養殖成敗的關鍵因素[1]。深遠海養殖工船作為深遠海養殖的一個發展方向,集成了繁育、養殖、加工、冷凍冷藏等魚貨物供給的一條龍功能,有效地推進海洋漁業的轉型發展[2]。養殖工船通常系泊工作于水質和風浪條件合適的深遠海海域,并汲取海水至養殖液艙[3]。當收到惡劣海況預報時,養殖工船可依靠其自航能力提前撤離危險區域,達到防風避臺的目的。為了在設計初期確保養殖工船具有惡劣海況下的生存能力,最小推進功率的校核是必不可少的關鍵設計步驟。
2009年國際海事組織(IMO)海洋環境保護委員會(MEPC)提出船舶能效設計指數(EEDI)[4],旨在提高船舶能效水平,減少船舶業的溫室氣體排放。船舶的設計建造者為了滿足EEDI的要求,較為有效的方法就是降低船舶裝機功率和航速。這種方法同時也使得船舶在惡劣海況下可能會出現因功率不足而影響操縱性能的情況,容易導致航行安全問題。針對這一問題,MEPC 第64屆會議通過了“惡劣海況下船舶維持操縱性的最小推進功率臨時導則”[5],并于第65屆會議對其進行了完善,即MEPC.232(65)決議(以下簡稱為決議)。決議明確要求船舶主機推進功率應不小于在惡劣海況下保持船舶操縱性所需要的最小推進功率。
根據決議的說明,最小推進功率有兩種評估方法:等級1的線評估法和等級2的簡化評估法。線評估方法較為嚴苛,對于肥大型船舶來說一般難以滿足[6]。簡化評估方法則通過計算惡劣海況下船舶在迎風迎浪時以最小前進速度航行時的阻力,進而間接得到所需的最小推進功率。這種方法將阻力分為4部分:靜水阻力、空氣阻力、附體阻力和波浪增阻,并給出了惡劣海況的風浪參數。其中,前3項阻力分量都可由決議推薦的經驗公式計算得到,波浪增阻的計算則需要通過模型試驗或其他可靠的方法得到。綜合來看,波浪增阻的準確預報是最小推進功率校核的關鍵。
除了船模試驗外,波浪增阻的研究方法有理論計算法和經驗公式法。理論計算法在勢流理論框架下分為遠場法和近場法。遠場法基于船體繞輻射波能在遠場總動量變化得到定常二階力,近場法是通過直接積分船體濕表面二階壓力得到[7]。經驗公式方法從理論推導出發,通過試驗數據對公式局部修正。這些方法對船型和航速都有一定的適用范圍,且無法考慮各種復雜流動現象導致的強非線性因素。計算流體力學方法(computational fluid dynamics, 簡稱CFD)不僅可以充分考慮流體的黏性作用,還可以將流體的非線性因素計算在內。CFD方法與試驗流體力學(experimental fluid dynamics,簡稱EFD)方法相比,成本更低,又可以給出船體周圍復雜流場的信息,近年來成為求解船舶與海洋工程水動力問題的一種重要手段。
沈志榮等[8]利用naoe-FOAM-SJTU求解器計算分析了Wigley III型船模在迎浪中的運動響應及波浪增阻,并與試驗數據和勢流計算結果進行了對比。方昭昭等[9]基于FLUENT求解器建立數值波浪水池,就規則波頂浪中航行船舶的運動與波浪增阻進行數值模擬計算,計算結果和試驗值吻合較好。曹陽等[10]使用重疊網格方法對KVLCC2船型迎浪航行進行了數值模擬研究,證明了CFD方法能夠在全波長范圍內更準確地預報船舶在波浪上增阻。這些研究使用不同的數值模擬方法計算了各類船型在模型尺度下的波浪增阻問題,表明使用CFD方法計算波浪增阻問題是切實可行的。但針對養殖工船最小推進功率校核的實際問題,模型尺度的計算將會帶來尺度效應的影響,若進行尺度修正又會帶來誤差,更合適的方法是直接進行波浪增阻的實尺度數值模擬計算。
以十萬噸級深遠海養殖工船為研究對象,使用STAR-CCM+商業求解器,以實尺度CFD方法得到了其在規定海況下的波浪增阻計算結果,并對其最小推進功率進行了計算校核。為驗證計算方法的可靠性,進行了該船型在迎浪航行狀態下的EFD船模試驗,并與幾組模型尺度下的CFD數值計算結果進行了對比。最終結果表明實尺度CFD數值模擬方法可以用于養殖工船最小推進功率的校核,該船型使用簡化評估方法校核最小推進功率更容易滿足規范要求。
1 EFD試驗準備和CFD計算的前處理
1.1 模型參數
研究對象為十萬噸級深遠海養殖工船,主要船型參數見表1。

表1 主要船型參數Tab. 1 Main ship parameters
EFD模型試驗及與其對照的CFD模型尺度計算所用的船模縮尺比為1∶80,船體模型嚴格依據型線圖按上述縮尺比加工,模型幾何尺寸誤差不超過2 mm,吃水誤差不超過1 mm。直接用于最小推進功率校核的CFD實尺度算例則使用實際船型參數。圖1為試驗模型及CFD計算模型。
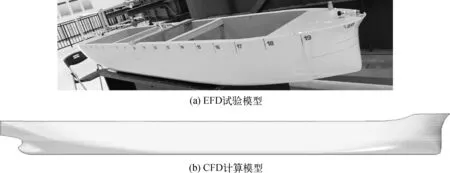
圖1 試驗模型和計算模型Fig. 1 Test model and calculation model
1.2 模型試驗和模擬計算海況
根據MEPC.232(65)決議要求,最小推進功率等級2的簡化評估方法基于這樣的原則:如果船舶具有足夠的裝機功率在迎風迎浪中以一定的前進速度移動,則船舶也能夠在任何其他方向的波浪和風中保持航向,即滿足最小前進速度要求也就是滿足航向保持要求[11]。
首先需要確定船舶在迎風迎浪時保證航向穩定性的最小航速。最小前進速度定義為:
VS=max{2.058 m/s,Vref-5.144(AR%-0.9)}
(1)
(2)
ALS=LppTm[1+25(BWL/Lpp)2]
(3)
式中:VS和Vref分別為最小前進速度和最小基準速度,Vref由表2線性插值得到。AR%為舵面積AR占船體側面浸水面積ALS的百分比,又稱為舵面積系數。
表2中AF為船體縱向受風面積,AL為船體橫向受風面積。經計算,此養殖工船最小前進速度VS為2.953 m/s,對應的弗勞德數為0.061。

表2 最小基準航向保持速度定義Tab. 2 Definition of minimum reference course keeping speed
設置6組不同波長的波浪參數進行EFD模型試驗,并選取其中3組參數進行CFD模型尺度計算并與之進行對比,以驗證CFD實尺度計算方法的可靠性。為試驗的方便,采取等波高的方法設計波浪參數。再設置5組實尺度CFD計算海況進行數值計算,采用等波陡的方法設計波浪參數,得到的波浪增阻計算結果直接用于最小推進功率的校核。所有的EFD模型試驗和CFD模擬計算波浪參數如表3所示。
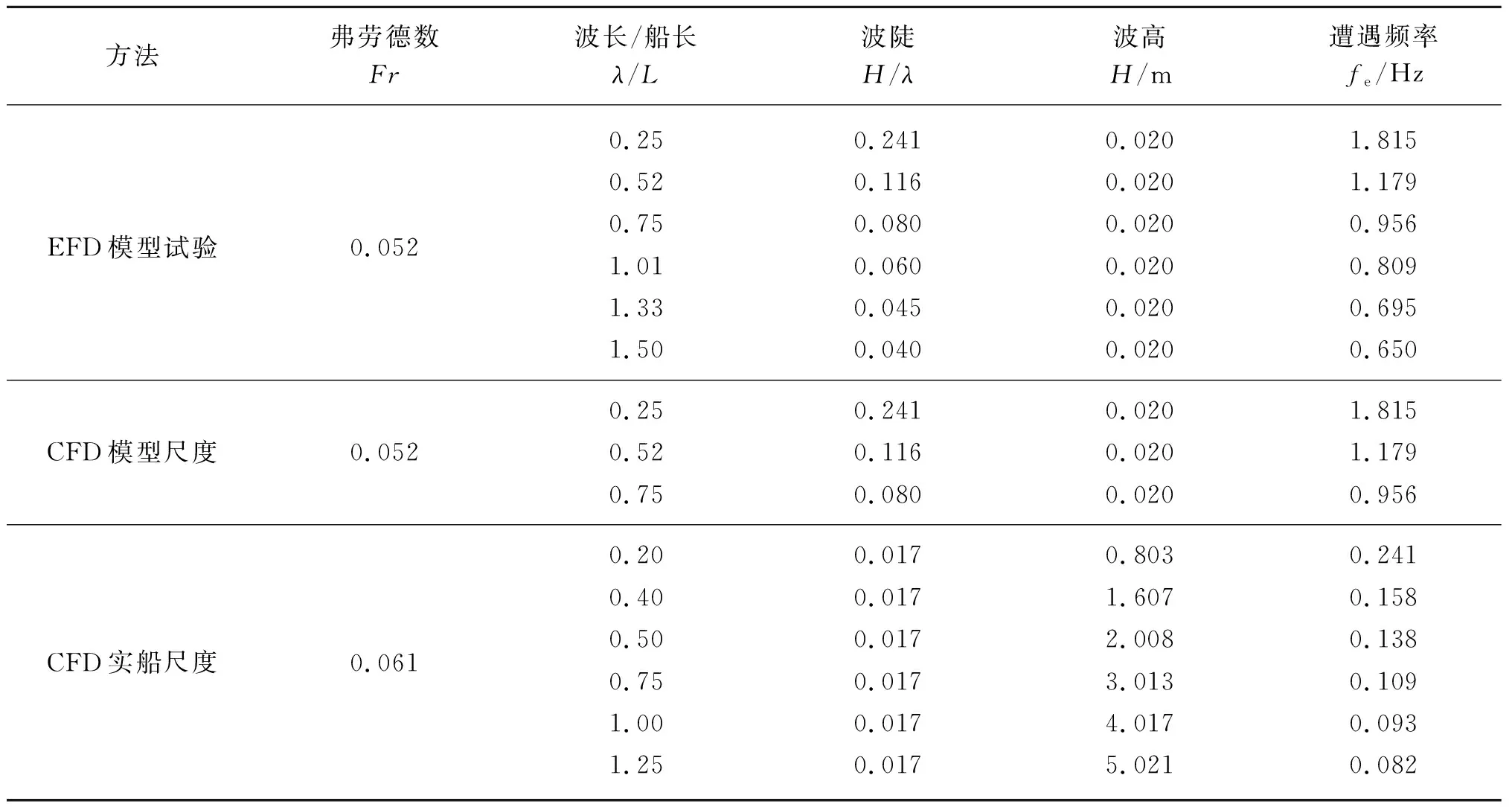
表3 EFD模型試驗和CFD模擬計算的波浪參數Tab. 3 Wave parameters of EFD model test and CFD simulation
1.3 EFD模型試驗設置
EFD模型試驗在風洞循環水槽實驗室進行,圖2為風洞循環水槽試驗裝置總體布局及循環水槽全景。試驗中使用的主要試驗設備有:循環水槽、隨動式4自由度適航儀、日章電機LMC-1541單分量天平、慣量調節架等。其中循環水槽試驗段長8.0 m,寬3.0 m,水深1.6 m,最高流速3 m/s;配備4座葉輪泵,可進行分層流試驗;具有造波、消波能力,可生成波高0.1 m的規則波、不規則波和內波;試驗段上游裝有表面流加速裝置,彌補了邊界層速度虧缺;配備了水自動過濾裝置和水位自動調節裝置。該試驗設施可完全滿足試驗要求。
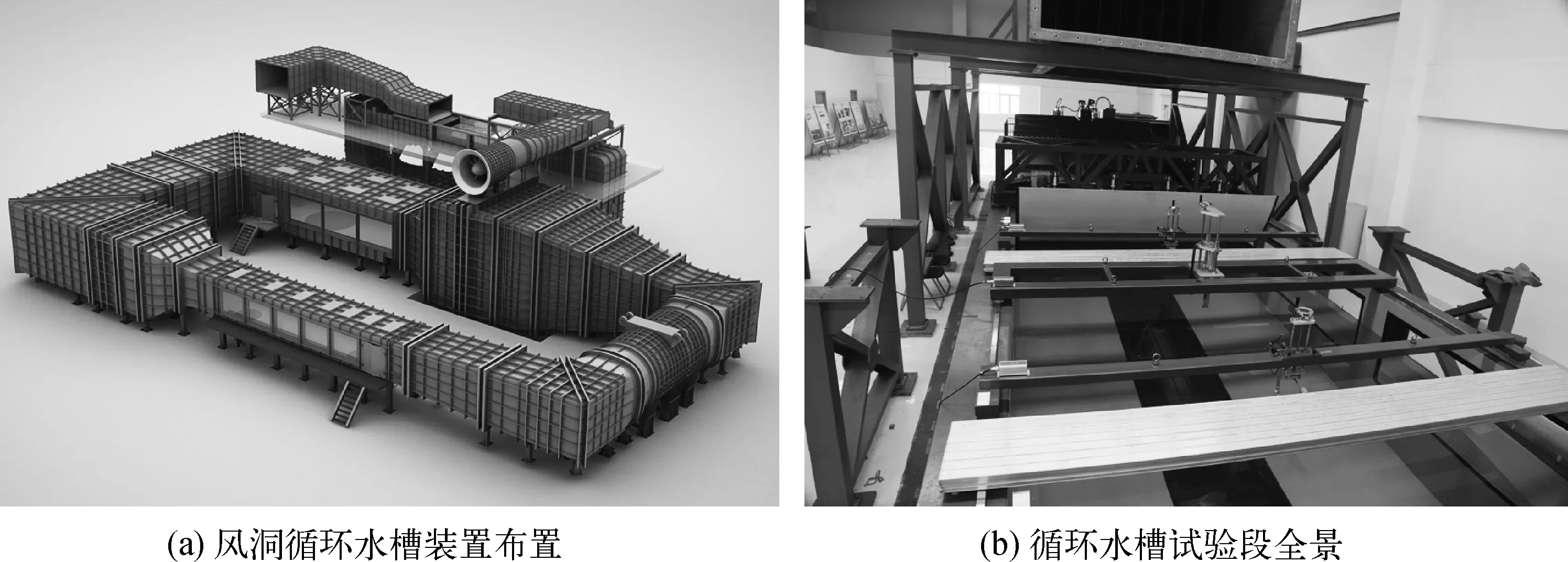
圖2 主要試驗裝置全景Fig. 2 Panorama of the main test device
試驗原理需保證模型與實船在幾何學上保持幾何相似,運動學上保持弗勞德數相似。試驗進行之前,先使用慣量調節架對試驗船模的重心位置和慣量進行調節,使其與設定參數相一致。試驗時將模型置于水槽中線處,與來流方向一致。水槽測試段前端造波機運動,形成浪流聯合條件。隨動式4自由度適航儀自動控制調節電機扭矩大小,使得模型在波浪中隨動,得到模型垂蕩和縱搖的運動幅值時歷變化。
1.4 CFD模擬計算設置
1.4.1 控制方程和物理模型
模擬計算的控制方程為連續性方程和雷諾平均Navier-Stokes方程(RANS):
(4)
(5)
(6)
(7)
(8)
其中,體積分數aq表示單元內第q相流體占總體積的比例分數。流體體積的輸運方程為:
(9)
為了求解雷諾應力項,引入可實現K-Epsilon模型來封閉控制方程。造波方法采用邊界輸入法,根據Stokes五階波的解析解,在計算域的邊界直接設定水質點速度和波面瞬時高度。定義縱向坐標x對應于波浪傳播方向,垂向坐標z為鉛垂向上的方向。根據Stokes五階波的解析解,在計算域的邊界分別設定水質點x方向速度ux、z方向速度uz和波面瞬時高度ηw為:
(10)
(11)
(12)
式中:ω、d和k分別為圓頻率、水深和波數。其余各項系數可參考文獻[12]。在出口邊界設置寬度為兩倍波長的消波區,使用阻尼消波法消除反射波的影響。此外,使用HRIC(high-resolution interface capturing)高分辨率接觸面捕捉方法提高自由液面的捕捉精度。
使用有限體積法(FVM)將控制方程離散化。所有數值插分、微分和積分都是基于二階近似。所得的耦合方程組被線性化,并由隱式非定常求解器求解。計算時使用SIMPLE方法以獲取壓力值并校正速度。
1.4.2 計算域和網格設置
為減少計算量,根據船舶在迎浪狀態下流場特征和運動響應的對稱性,只取船中縱剖面一側的流域進行研究。坐標原點設在船體重心處,計算域大小及各邊界條件如圖3所示。
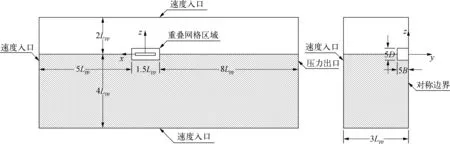
圖3 計算域設置Fig. 3 Computing domain settings
使用重疊網格方法及DFBI (displaying dynamic fluid body interaction)模型實現對船體迎浪時的垂蕩與縱傾運動的模擬。重疊區域和背景區域的網格采用切割體非結構網格形式,基礎尺寸設為1/10LPP;船體邊界層采用棱柱層網格進行捕捉,棱柱層增長率設為1.2。模型尺度計算時需調整近壁面第一層網格的高度以使船體表面Y+在30至100之間,確保壁面函數方法可以較好地求解出近壁面區域的流動情況。實尺度模擬計算的雷諾數相較模型尺度來說要大715倍,為避免第一層網格高度過小,放寬Y+到300至500范圍內,并適當增加棱柱層數。在背景網格區域設置多層嵌套的加密區,使網格尺寸平滑過渡。在船艏和船艉槳軸等流場變化較快的區域設置適當的加密區,以精確捕捉流場特征。此外,為保證波浪的多周期穩定傳播,還需對自由液面處網格進行加密。在波浪起伏范圍內,Z方向網格尺寸設為0.05H,H為波高,保證20個網格的解析度;X方向的網格尺寸設為0.4H;Y方向網格尺寸設為4H,并設置多層加密區進行過渡。由于自由液面處加密區以及棱柱層設置的不同,模型尺度算例的網格數在9×106至12×106之間,實船尺度算例的網格在11×106至17×106之間。圖4為實船尺度算例中縱對稱面船體附近的網格示意,船體表面Y+的值也顯示在圖中。
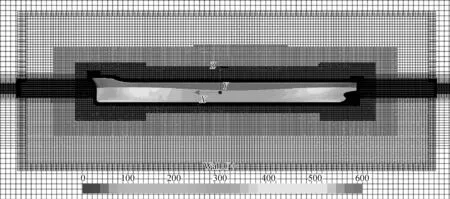
圖4 實尺度CFD計算網格設置和船體表面Y+分布Fig. 4 Full scale CFD calculation grid setting and hull surface Y+ distribution
2 EFD試驗結果和CFD計算的后處理
為了定量分析和比較計算結果,采用傅里葉級數展開的方式對數據進行分析處理。某一物理量的時域φ(t)可表示為:
(13)
式中:ωe為船模遭遇頻率,γi為第i階系數對應的初始相位。將船舶運動中垂蕩和縱搖時歷曲線依據公式(13)進行傅里葉級數展開,可以得到不同階數的幅值以及相位。取傅里葉級數中的一階響應系數,可以將船舶的垂蕩運動z和縱搖運動θ表示成如下形式:
z=zacos(ωet+εz)
(14)
θ=θacos(ωet+εθ)
(15)

(16)
(17)
(18)
其中,a是入射波波幅;k=2π/λ是波數;Rwave為規則波中的波浪增阻,Rwave=FX,wave+FX,calm,FX,wave和FX,calm為船體在波浪和靜水中阻力的平均值。其中垂蕩和縱搖以船體重心為參考點。

(19)
式中:FX為沿X方向總阻力,S為船體在靜水中的濕表面面積。此外,在中縱剖面船艏2LPP處設置數值探針,以監測入射波波幅隨時間的變化情況,確保波浪參數的準確。
2.1 EFD阻力試驗結果和模型尺度CFD計算結果
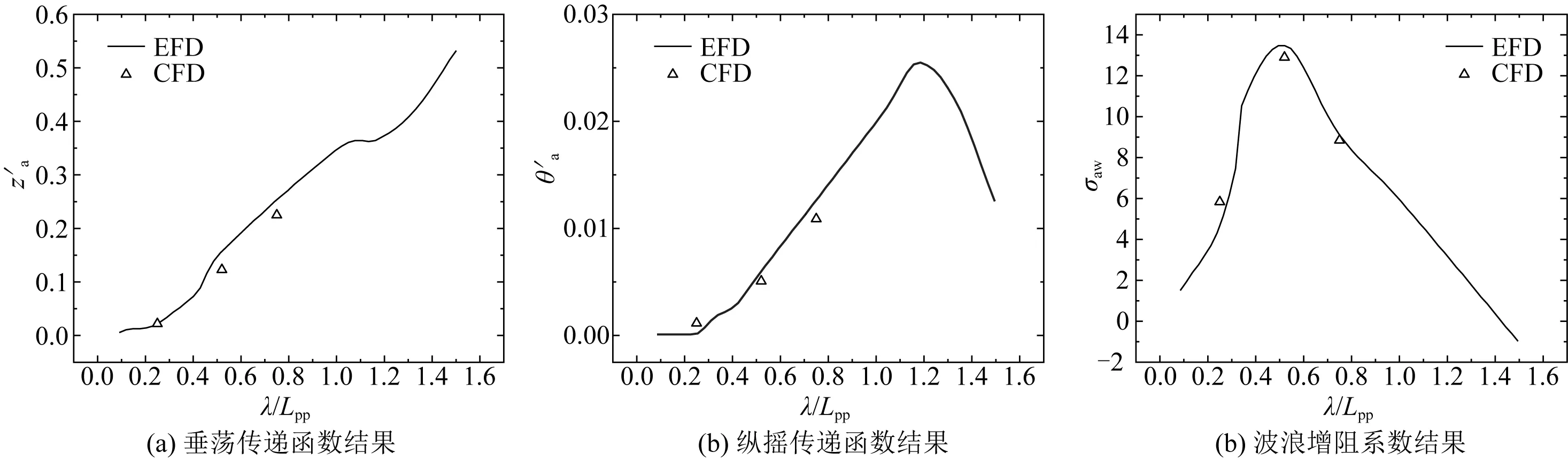
圖5 EFD與CFD結果對比Fig. 5 Comparison of EFD and CFD results
3組模型尺度CFD計算結果與EFD試驗結果相比,在λ=0.2LPP的入射波激勵下3個參數的計算值略大于試驗值。隨著入射波波長的增大,CFD計算結果均小于試驗值。除了λ=0.2LPP入射波對應的波浪增阻系數以外,其余數據點計算值和試驗值的誤差均在10%以內,符合工程精度要求,說明使用CFD方法計算船在波浪中的運動響應和阻力是可行的。
2.2 實尺度CFD計算結果
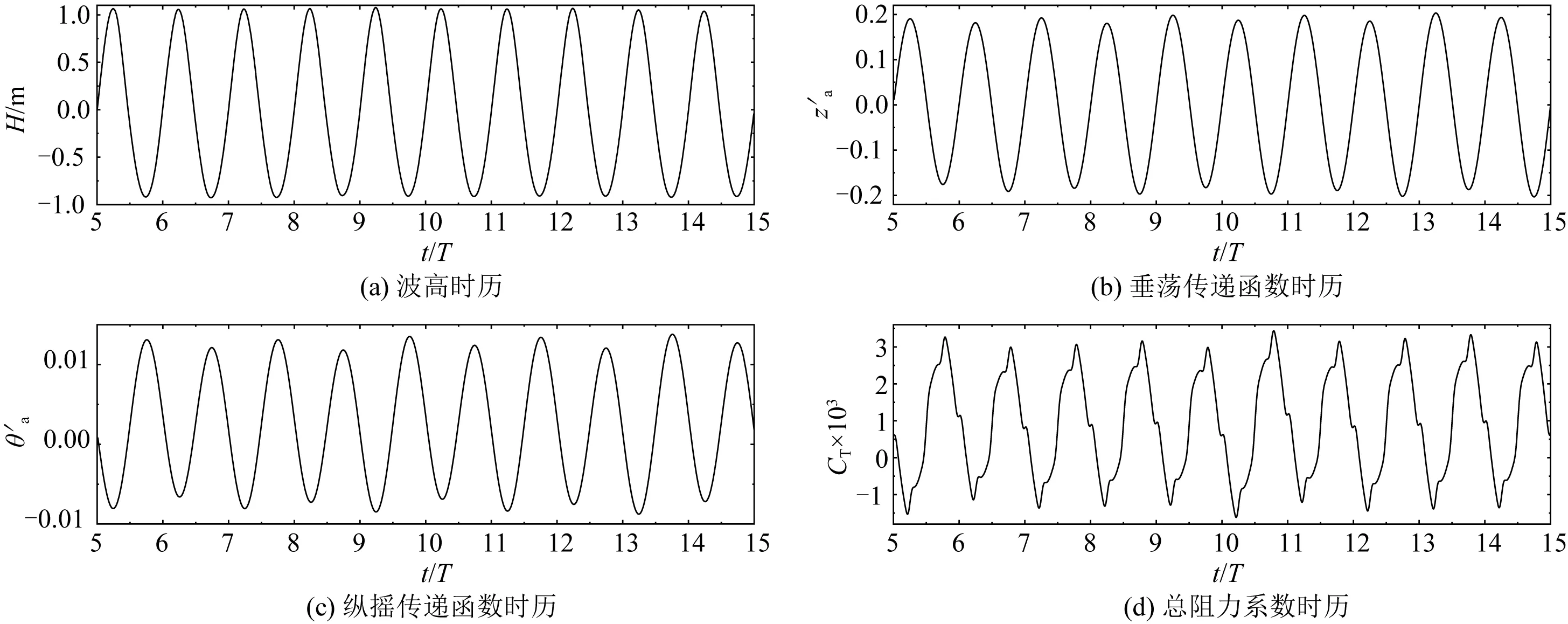
圖6 入射波波長0.5LPP算例監測結果Fig. 6 Monitoring results of the incident wave wavelength 0.5LPP case
從監測結果可知,當計算穩定后,各參數時歷值呈周期性變化。其中入射波最大波幅的平均值為1.061 m,與斯托克斯五階波理論值1.085 m相比小2.30%,衰減幅度在可接受范圍內。升沉和縱搖運動傳遞函數變化趨勢接近線性,總阻力系數時歷曲線則有明顯的非線性特征。圖7為自由液面波形圖,由于船型較為肥大且航速較低,在船艏可看出明顯的堆水現象,顯示出非線性特征。同時在重疊網格和背景網格的交界處,可以看出流場有一定的不連續,這是由于重疊網格的插值和網格大小的變化造成的,說明在網格的設置方面還有改進空間。
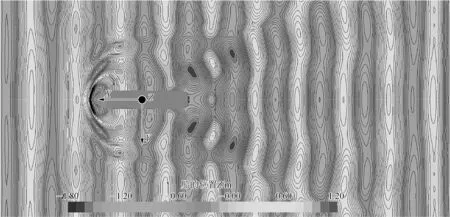
圖7 自由液面波形Fig. 7 Free surface wave pattern
將所有算例的波浪增阻系數σaw進行匯總,如圖8所示。
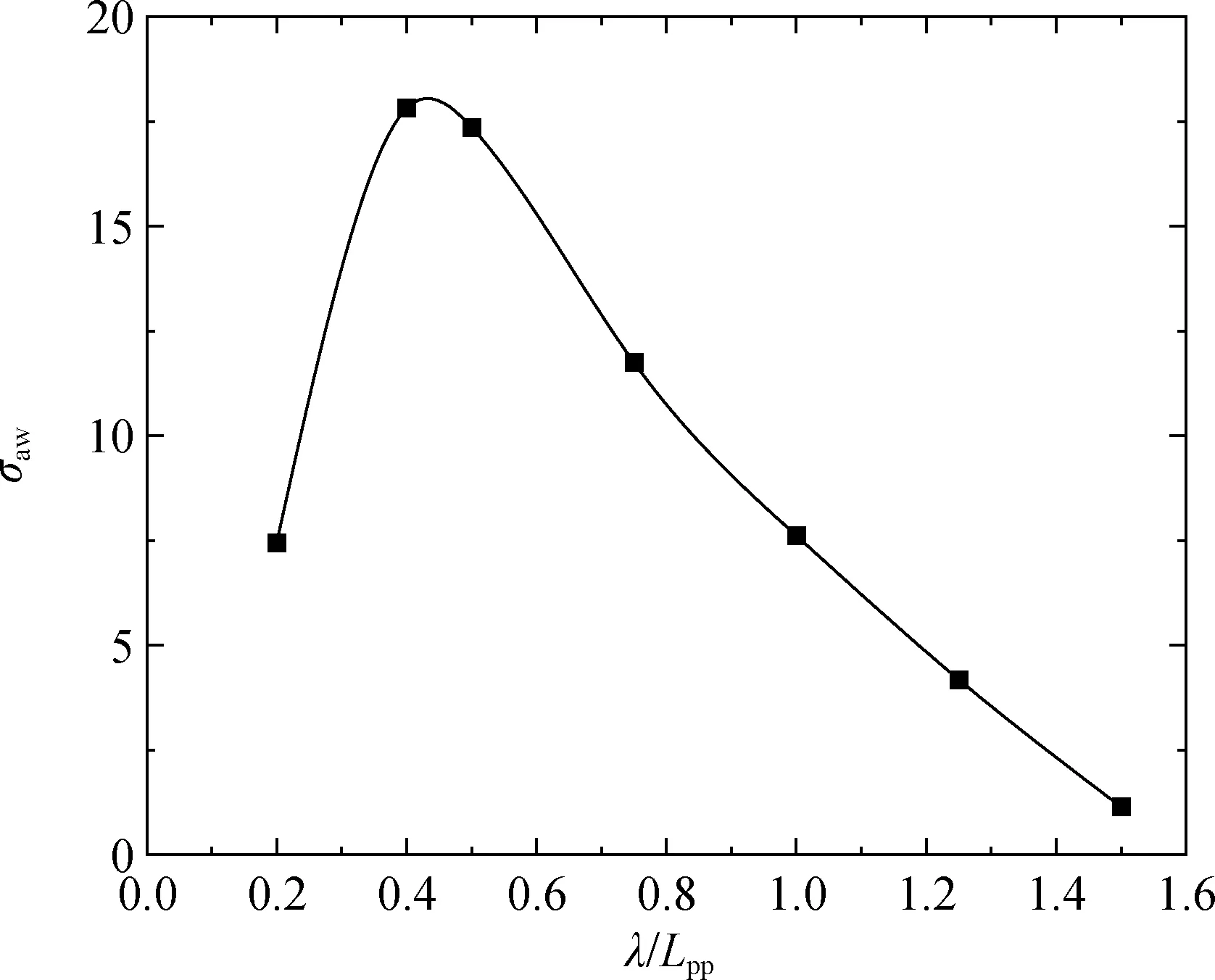
圖8 實尺度CFD波浪增阻系數計算結果 Fig. 8 Full-scale CFD wave resistance increase coefficient calculation results
由結果分析可知,波浪增阻峰值對應的入射波波長在0.5Lpp附近,增加此波長附近工況有利于提高波浪增阻的計算精度。CFD實尺度計算結果符合客觀規律,較為可靠。
2.3 最小推進功率校核
MEPC.232(65)決議中的等級1線評估法給出的最小功率線值PLV可由式(20)計算:
PLV=a×(DWT)+b
(20)
式中:DWT為載重噸。對于養殖工船,參數a和b分別取0.068 9和3 253.0,計算得到PLV為11 610 kW。
等級2的簡化評估法將船舶在惡劣海況下螺旋槳的推力T分為4部分,分別為靜水阻力Rcw、空氣阻力Rair、附體阻力Rapp和波浪增阻Raw,并考慮推力減額分數t:
T=(Rcw+Rapp+Rair+Raw)/(1-t)
(21)
其中,靜水中的裸露船體阻力Rcw和空氣動力學阻力Rair均可由推薦的經驗公式計算得到;由于附體阻力Rapp一般占比較小,可由簡單等效方法計算。波浪增阻Raw需要由水池試驗或等效的可靠方法獲得。研究采用實尺度CFD方法計算得到波浪增阻系數進行譜分析得到。
2.3.1 確定惡劣海況參數
為計算十萬噸級深遠海養殖工船在極端情況下的生存能力,需要對惡劣海況進行規定,并計算在此海況下養殖工船的阻力和推力性能。最小推進功率導則所規定的惡劣海況參數需根據表4來確定。

表4 惡劣海況參數Tab. 4 Severe sea conditions parameters
根據此深遠海養殖工船船長線性插值,得到對應的惡劣海況有效波高HS為5.230 m,譜峰周期TP在7 s至15 s之間,平均風速Vw為18.406 m/s。
2.3.2 計算靜水阻力Rcw
靜水阻力的計算根據相當平板理論,采用1957年ITTC公式來計算靜水阻力Rcw,計算公式如下:
(22)
(23)
(24)
式中:k為船體形狀因子,可由經驗公式(24)得到;S為船體濕表面積;CF為摩擦阻力系數;CB為方形系數。
2.3.3 計算附體阻力Rapp
由于附體阻力占總阻力比例較小,一般可以使用簡單等效方法計算。將所有附體的濕表面積Sapp加入公式(25)船體的濕表面積中,用與靜水阻力相同的計算方法得到附體阻力的大小,即:
(25)
2.3.4 計算空氣阻力Rair
空氣阻力Rair可以采用式(26)計算:
(26)
式中:AF為船體正面受風面積;Vrw為船與風的相對速度,Vrw=VS+VW;Cair為空氣阻力系數,可以由試驗或者經驗給出。這里采用經驗公式得到Cair為:
(27)
式中:AL為船體橫向受風面積;C為船舶橫向受風面積的形心距船中的位置,靠近船艏為正。
2.3.5 計算波浪增阻Raw
規定惡劣海況不規則波浪環境下的波浪增阻Raw可根據不同頻率下規則波中波浪增阻Rwawe通過譜分析方法得到,而規則波中波浪增阻Rwawe可根據公式(18)由波浪增阻系數σaw得到,所以Raw可表示為:
(28)
式中:a為入射波波幅;S(ω)為波浪譜密度函數。最小推進功率導則中推薦波浪譜密度函數采用1978年第15屆ITTC提出的Jonswap平均波能譜,其定義和相關系數表達式為:
(29)
(30)
ω0=4.85/T1
(31)
T1=4.85TP/(2π)
(32)
(33)
其中,HS為有效波高,T1為平均周期,TP為譜峰周期。有效波高HS和譜峰周期TP由上述惡劣海況定義表得到。
2.3.6 確定最小推進功率
當螺旋槳所需推力T確定后,可由式(34)通過螺旋槳敞水特征曲線插值得到進速系數J,具體為:
(34)
式中:KT(J)為推力分數,DP為螺旋槳直徑,進速ua=VS(1-w),w為伴流分數。研究螺旋槳敞水特性曲線參考MAU4-40槳標準圖譜,進速系數J根據曲線插值得到。伴流分數參考最小推進功率導則的推薦值選為0.35,推力減額系數保守估計為t=0.7w。
推力系數KT、轉矩系數KQ和進速系數J分別定義為:
(35)
(36)
(37)
有了進速系數J,螺旋槳轉速n、收到功率PD以及主機功率PS可由式(38)到式(40)計算得到:
n=ua/(JDP)
(38)
(39)
PS=PD/ηs
(40)
式中:ηs為傳輸效率,對于尾機型船可取0.98。由于柴油機轉矩轉速特征曲線對可用功率的限制,還需結合曲線檢驗轉矩是否超過最大轉矩,以最終確定所需的最小裝機功率值。計算結果見表5。
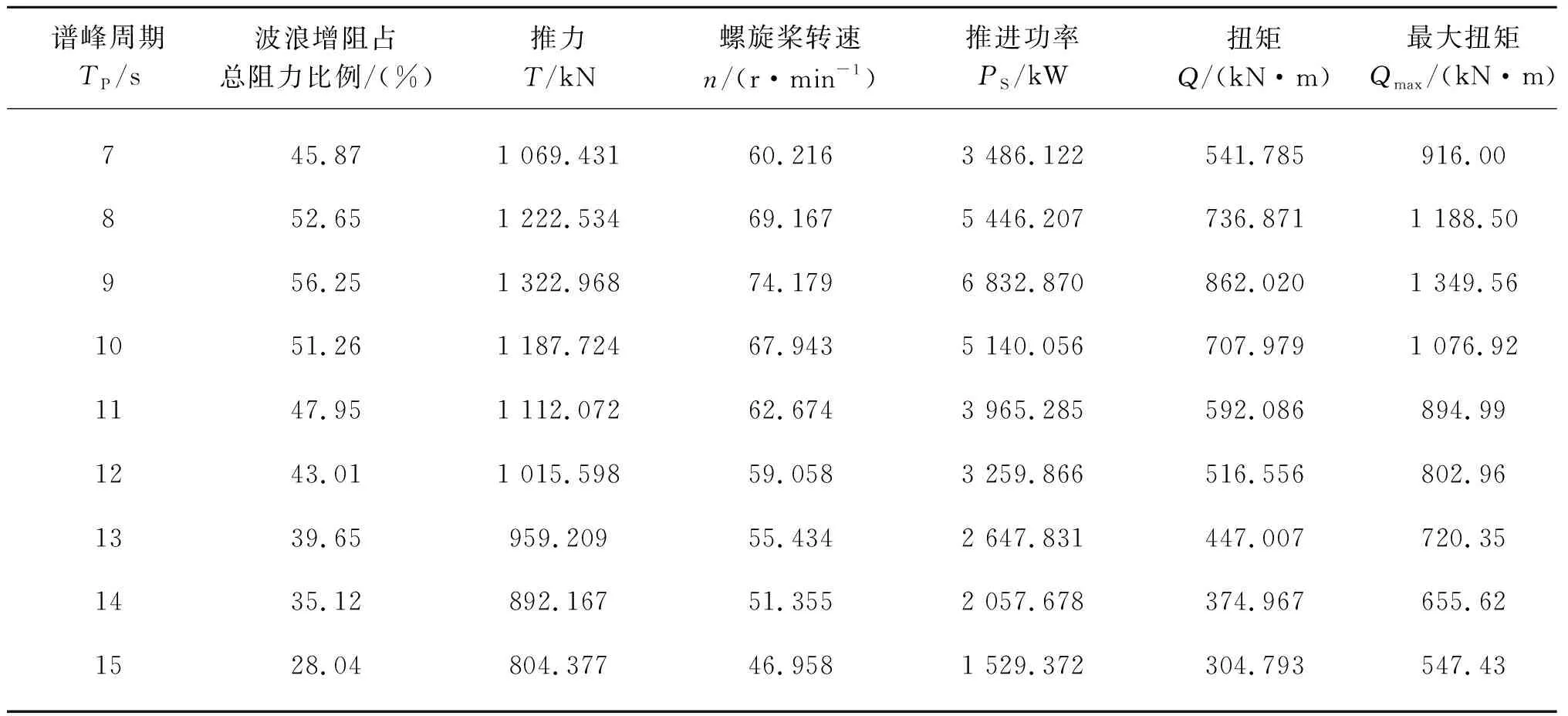
表5 最小推進功率簡化評估法計算結果Tab. 5 Calculation results of the minimum push power simplified evaluation method
由計算結果可知,對于此深遠海養殖工船來說,最小推進功率校核時所規定的惡劣海況下波浪增阻占總阻力比例較大,在28%至57%之間。譜峰周期TP在8 s至10 s之間所對應的海況較為危險,此時總阻力和所需功率較大,轉矩達到最大轉矩的63.9%。等級2簡化評估法得到的最小推進功率最大值為6 832.870 kW,為等級1線評估法給出的最小功率線值PLV的58.9%,在裝機功率不變的情況下,使用簡化評估法進行校核更容易達到規范要求。
3 結 語
以十萬噸級深遠海養殖工船為研究對象,使用EFD模型試驗和CFD模擬計算相結合的方法,研究了船在波浪中的阻力與運動響應特征,并使用實尺度CFD模擬計算所得到的波浪增阻結果對此船型的最小推進功率進行了校核。主要結論有:
1) CFD數值模擬方法可用于研究船在波浪中的阻力與運動響應特征,所得結果與EFD試驗值吻合良好;
2) CFD計算結果顯示,總阻力系數時歷曲線顯示出非線性特征,且自由液面波形圖也顯示出船體附近復雜的流場現象,說明使用CFD直接計算船舶在波浪中的波浪增阻系數可充分考慮這些非線性因素;
3) 實尺度CFD計算方法可避免尺度效應的影響,計算結果不需要進行換算便可直接用于最小推進功率的校核;
4) 最小推進功率校核所規定的惡劣海況下,波浪增阻占總阻力比例較大,提高波浪增阻的計算精度是校核結果準確可靠的關鍵;
5) 對于深遠海養殖工船這類肥大型船舶來說,等級1線評估方法更為嚴苛,計算更為保守,使用等級2簡化評估方法進行評估更容易滿足規范要求。
致謝:上海超算科技有限公司對本研究的支持表示感謝。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56