月面無人自主采樣返回任務動力下降點確定及驗證
2021-12-21 09:09:58趙洋盛瑞卿陳春亮張曉文鄒樂洋高珊黃昊
中國空間科學技術 2021年6期
趙洋,盛瑞卿,陳春亮,張曉文,鄒樂洋,高珊,黃昊
1. 北京空間飛行器總體設計部,北京 100094 2. 北京控制工程研究所,北京 100094
1 引言
嫦娥五號探測器成功實現了月面無人自主采樣返回任務。作為保證月面采樣的前提,執行月面軟著陸是整個任務中極為重要的環節。這一過程從近月點附近的動力下降點開始,負責執行軟著陸的探測器通過減速制動發動機點火,經過主減速、快速調整、接近、懸停避障等階段,直至著陸月面既定區域內[1]。在著陸過程中需要根據導航敏感器實時測量探測器距離月面的高度、速度并按照制導控制律對探測器進行控制,最終保證探測器在指定目標范圍內著陸。
動力下降點作為整個月面軟著陸過程的“起始點”,也是地面軌道控制與探測器自主執行導航、制導與控制的關鍵“交班點”,其設計結果直接影響了最終著陸點的位置和著陸過程的著陸安全,也間接影響采樣安全和采樣工程目標的實現結果。而動力下降點的確定也是多系統間交互迭代的過程,涉及任務軌道設計、著陸目標的采樣區確定、著陸過程安全分析、采樣區地形地貌分析等環節。
針對在月面預定位置實現軟著陸的問題,眾多文獻分別從軌道設計、最優標稱制導軌跡設計、月面采樣點確定、著陸安全區域搜索等方面進行了研究,其中文獻[2]提出了在月面目標著陸點實施精確軟著陸的燃耗最優標稱制導軌跡設計方法;文獻[3]針對月面定點著陸任務需求,設計了環月非對稱降軌控制策略;文獻[4]針對定時定點月面著陸的目標要求,提出了全程軌道控制設計方法;文獻[5]提出了月面復雜地形表層采樣可采點確定方法;文獻[6]提出了在月球軟著陸過程中識別障礙物,并利用高程圖尋找安全著陸點的軟著陸算法。國內外相關文獻主要針對月面著陸關鍵要素進行了獨立的設計優化工作。而如何通過多次聯合調整軌道和著陸過程最優制導航跡,并在這個過程中綜合考慮月面采樣需求、著陸區安全,確保月面著陸及起飛動作順利完成,是月面無人自主采樣返回這類存在多任務階段、復雜飛行過程、高精度軌道控制要求等特點的復雜深空探測任務亟需解決的問題。
本文根據嫦娥五號月面無人自主采樣返回任務月面采樣區定點著陸的任務需求,結合環月段軌道精確控制策略的設計結果,在綜合月面軟著陸、月面采樣及起飛安全的需求,提出了在環月軌道基于“逐次逼近尋優”方法的月面軟著陸過程動力下降點確定方法,即在動力下降前通過多次軌道控制與最優標稱制導軌跡搜索聯合控制策略的調整方法以確保著陸在月面目標落點,同時兼顧月面著陸、月面采樣和月面起飛過程安全性,并依據該方法設計了具體實施流程。本文所介紹的“逐次逼近尋優”方法確定月面軟著陸的動力下降點已經在嫦娥五號任務上得到了成功驗證,對探測器實施月面著陸起到了重要的決定作用,所使用的方法對于復雜的地外天體著陸探測任務具有充分借鑒性。
2 月面無人自主采樣返回任務過程
嫦娥五號月面無人自主采樣返回任務整個飛行過程主要包括:發射入軌段、地月轉移段、近月制動段、環月飛行段、著陸下降段、月面工作段、月面上升段、交會對接與樣品轉移段、環月等待段、月地轉移段、再入回收段共11個階段,如圖 1所示,整個飛行過程持續23 d。
根據飛行過程設計,在實施月面動力下降軟著陸前,探測器需要經過為期2 d的環月軌道飛行過程,該階段從探測器完成近月制動后開始,著陸器-上升器組合體與軌道器-返回器從200 km環月軌道經過兩次降軌變軌后進入200 km×15 km的環月軌道,飛行至動力下降點,開始實施動力下降。在著陸上升組合體著陸月面后,在月面短時間(2 d)內完成月壤采樣及封裝工作,隨后上升器攜帶月壤樣品再從月面點火起飛,進入15 km×180 km環月軌道,完成后續交會對接任務,如圖 2所示。
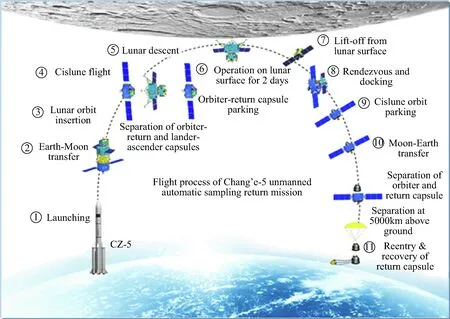
圖1 嫦娥五號月面無人自主采樣返回任務飛行過程示意Fig.1 Flight process of Chang’e-5 unmanned automatic sampling and return mission
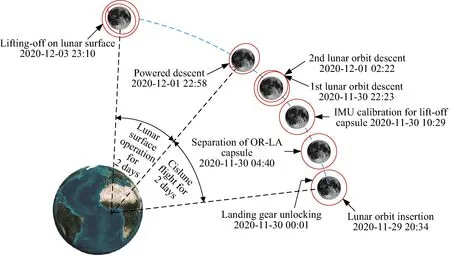
圖2 嫦娥五號環月及月面工作飛行過程示意Fig.2 Flight process of cislune and lunar surface operation
對于實現月面軟著陸的動力下降過程,則是在15 km×200 km環月軌道的近月點附近,通過發動機點火減速制動,由探測器自主控制至著陸在月面目標點。由于動力下降的軌控過程與探測器距月球表面實際高度密切相關,在動力下降過程中針對探測器高度變化,設計不同的導航敏感器使用策略[7],如圖3所示。
其中,在距月面15~2 km的主減速段,主要采用捷聯慣導平臺實現自主慣性導航外推,在下降到12 km高度后,引入激光、微波測距敏感器對慣性導航信息進行修正,從而實現對高度測量誤差的修正;在下降到4 km后,引入激光、微波測速敏感器作為動力下降過程速度測量新息,修正速度測量偏差;最后在距月面1.5 km的接近段和100 m懸停避障段,分別引入光學成像敏感器和激光三維成像敏感器,對目標著陸采樣區的地形進行成像并檢測障礙物(直徑大于1 m的石塊或坑),并確定安全著陸點。
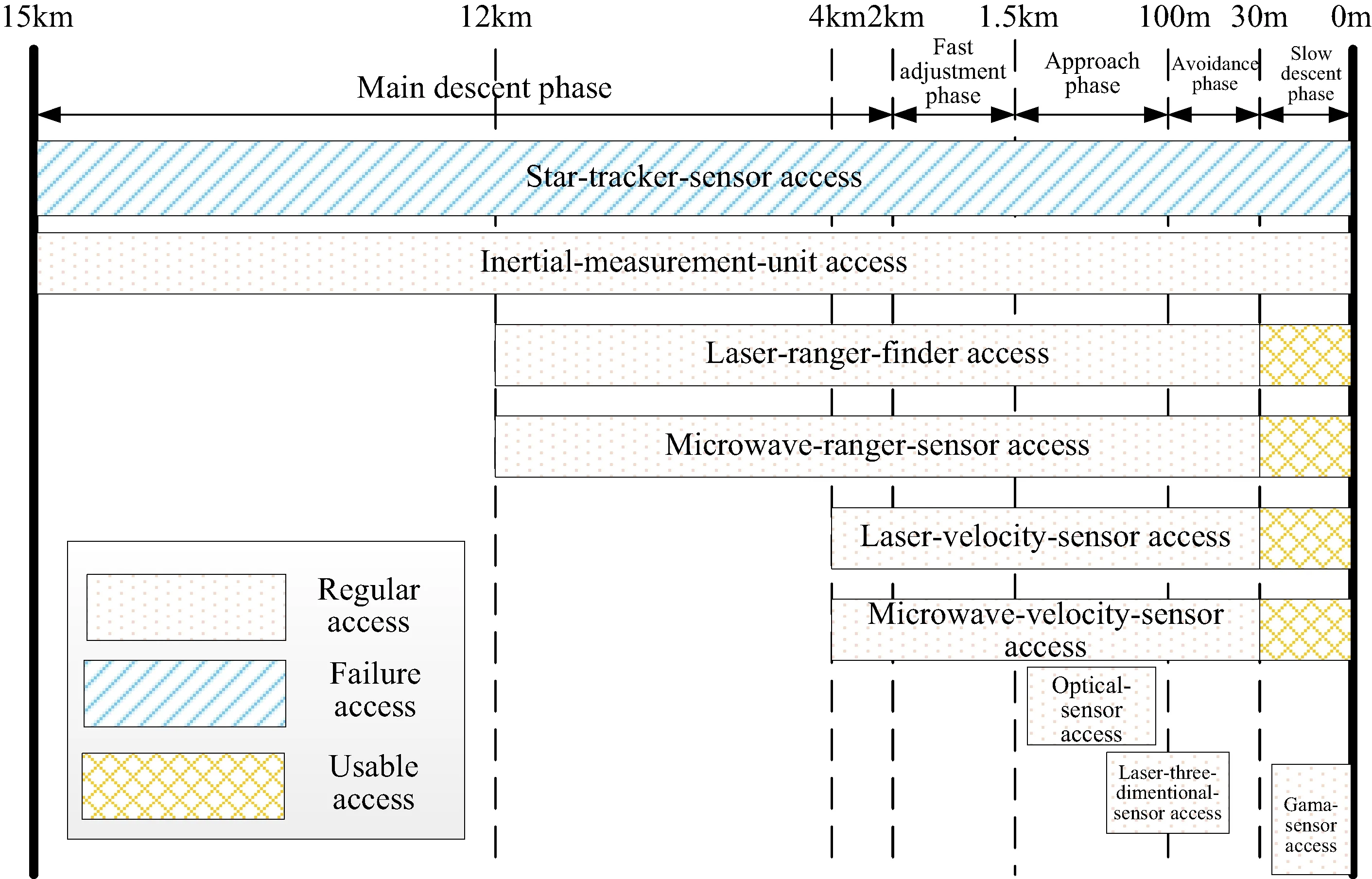
圖3 嫦娥五號探測器著陸上升組合體動力下降過程敏感器使用情況示意圖Fig.3 Navigation sensor utilization for powered descent phase of Chang’e-5 lunar exploration mission
3 動力下降點確定的原理及約束條件
3.1 動力下降點的確定原理
動力下降點,顧名思義為執行月面著陸探測器開始點火減速制動的位置,其確定原理如圖 4所示。其中:A點為動力下降點、B點為動力下降點對應的器下點、C點為導航控制系統引入高度測量值時的點、D點為C點的器下點,E點為著陸月面的點。動力下降點A與此時月面器下點B(真實月面)間距離,即動力下降點相對于真實月面實際高度為H1;動力下降點A與此時月面器下點M(相對于月球平均海拔平面)間距離,即動力下降點軌道理論高度為H2;導航測距敏感器引入點C相對實際月面高度為H3;圖中ND虛線為過D點相對月心的一段圓弧線,ND與動力下降點A→月心連線的交點為N。動力下降點A與該點的距離為H4。
動力下降點確定的主要內容是確定在相對月面既定高度處實施探測器的點火制動動作。而根據動力下降過程的導航策略設計結果,為保證燃耗最優,通常動力下降點安排在近月點附近,同時為了確保導航控制系統在引入高度測量敏感器(距月面約12 km)的實測信息時濾波快速收斂,要求捷聯慣導平臺的高度積分結果與高度測量敏感器測量結果盡量接近,即動力下降點高度基準以引入測距敏感器時對應的月面實際高度為相對基準,根據動力下降航跡確定引入測距敏感器時對應的實際月面高度。因此,通常設置:H3≈12 km,H4≈15 km。
3.2 動力下降點確定約束條件
根據3.1節動力下降點定義及與動力下降航跡的空間幾何關系,可以分析出,與動力下降點需要確定的參數包括:
1)動力下降點軌道參數,主要包括動力下降點位置、速度以及軌道傾角等;
2)動力下降發動機點火前探測器初始質量;
3)動力下降過程用于減速制動的主發動機推力及比沖。
同時,在動力下降點確定過程中,還需要結合嫦娥五號月面無人自主采樣任務的設計特點,綜合考慮月面采樣區地形地貌特點以及月面著陸位置及姿態對后續動作,包括:月面采樣工作、月面起飛上升等關鍵環節的影響。
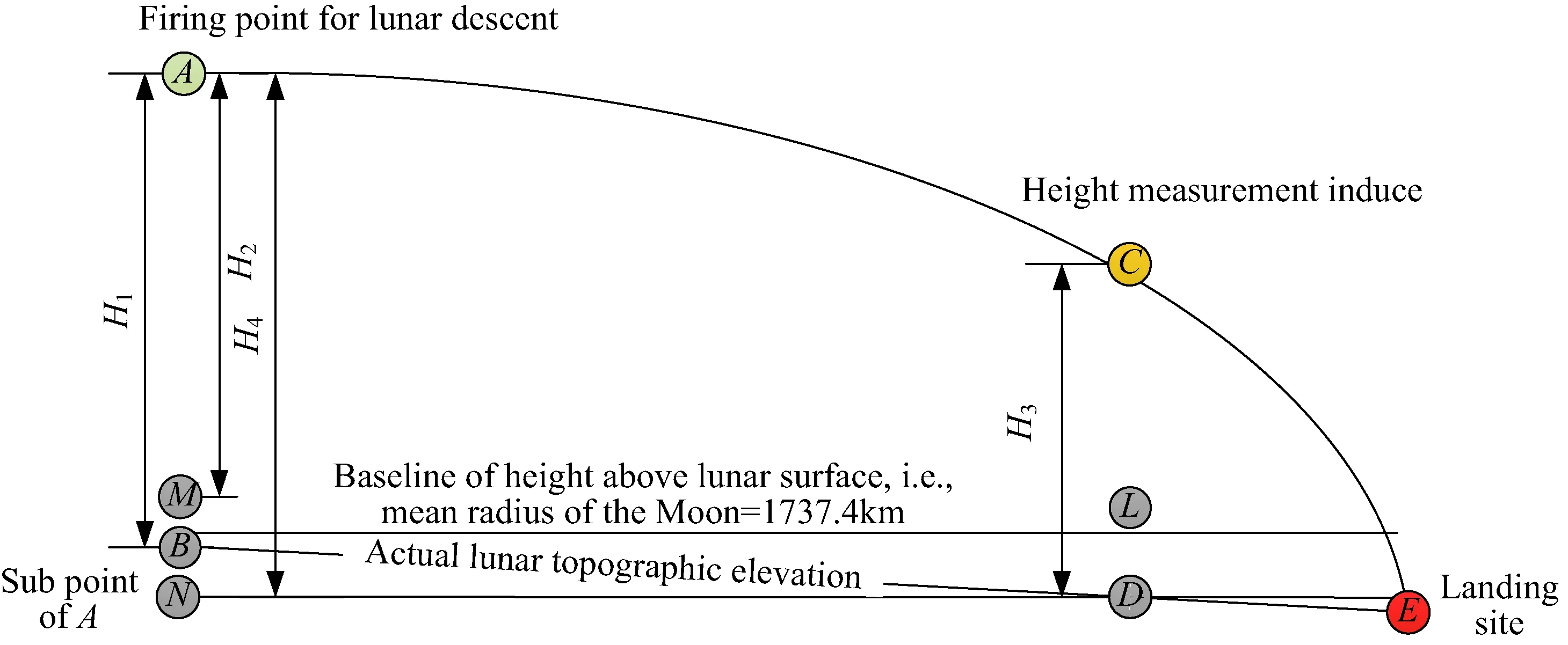
圖4 月面軟著陸動力下降航跡示意圖Fig.4 Flight track of powered descent on lunar soft landing
主要包括以下幾個方面:
(1)動力下降航跡過程的安全性
主要涉及探測器器下點地形地貌對于導航敏感器的影響,包括兩個方面:
1) 動力下降航跡覆蓋范圍對應的月面高程變化,主要影響的是微波和激光測距敏感器,若高程起伏變化較大,則不利于導航敏感器濾波收斂,同時也會影響測距信號有效性判斷,造成虛警。
2) 接近段航跡覆蓋范圍對應的月面地形地貌,主要影響的是光學成像敏感器和激光三維成像敏感器選擇月面安全著陸點的判斷輸出,若月面坡度較大、石塊、撞擊坑分布密度較高,會影響著陸安全。
(2)月面著陸及月面起飛的安全性
主要涉及目標著陸點地形地貌對于探測器的觸地安全影響和間接對月面點火起飛的安全影響。由于目標著陸點的月面坡度直接影響著陸姿態,若著陸姿態偏差過大,會導致探測器傾翻。而同時考慮完成月面采樣任務后,從月面穩定起飛上升,要求著陸姿態偏差在一定范圍內。
(3)月面采樣過程的安全性
包括石塊分布情況和月壤結構特性對月面鉆取及表取采樣過程的影響,若石塊分布較多、月壤結構較為堅硬,則難以實施月面采樣任務。
因此,需要綜合考慮上述影響因素,在充分分析月面采樣區地形地貌特點和動力下降過程安全性的前提條件下,結合全任務軌道設計結果和探測器質量特性、發動機工作特性等關鍵參數,實施動力下降點的確定與動力下降過程的仿真。
4 月面軟著陸過程動力下降點確定方法
動力下降點確定基于逐次逼近尋優策略的設計,主要包括兩方面:首先,在軌道設計上主要通過在近月制動及環月過程中,實施修正升交點赤經和軌道傾角的軌道面調整策略,以實現對落點經度的調整,而在環月降軌過程中主要瞄準動力下降點高度和落點緯度;同時,根據動力下降過程動力學模型,結合最優標稱軌跡設計結果,對最終著陸點進行預測,并將著陸點位置、著陸速度的預測結果與目標著陸點參數進行比較,將計算偏差作為重新確定動力下降點參數(位置、速度、發動機點火時間)的迭代輸入,重新引入到第一步的軌道調整策略中。即以月面著陸點為“目標”,經過環月軌道軌控策略(近月制動2次、環月降軌2次)“逐次逼近”迭代,確保按動力下降最優航跡估計的著陸點與目標著陸點“逐步接近”,最終將著陸點計算結果與理論目標的偏差縮小在閾值范圍內,即實現“目標尋優”,上述過程具體實現如圖 5所示。
具體包括以下幾個步驟:
1)根據初始動力下降點參數,確定動力下降過程動力學模型。
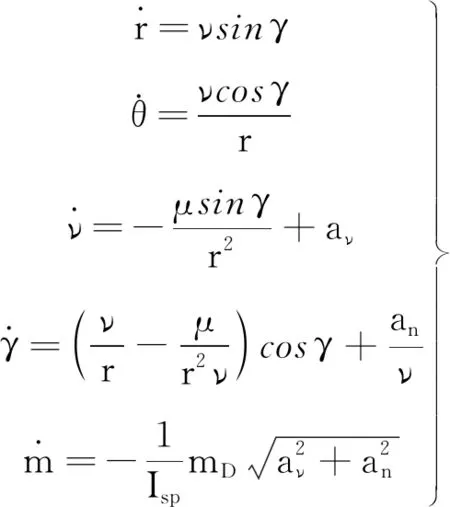
初始的動力下降點參數主要包括:在開始執行動力下降時刻TD時,探測器月心慣性系下位置PD=[XD,YD,ZD]、速度VD=[VxD,VyD,VzD]、軌道傾角iD、初始質量mD。其中,動力下降過程的動力學模型可以描述為[2]:
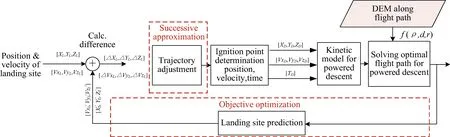
圖5 基于逐次逼近尋優策略的動力下降點確定原理圖Fig.5 Determination of ignition point for powered descent phase based on successive approximation and optimization
(1)
式中:r為任意位置探測器月心距;θ為月心-探測器矢量與月球自轉軸矢量夾角;ν為探測器飛行速度;γ為動力下降過程飛行彈道平面傾角;μ為月球引力常數;通常取μ=4.902 79×1012m3/s2;av為探測器在軌飛行速度矢量切向加速度;an為飛行速度矢量法向加速度;Isp為探測器動力下降主發動機比沖;m為探測器動力下降過程的質量。
2)根據動力學模型,結合航跡下地形數據,計算分析著陸安全,迭代求解最優標稱著陸航跡。
在給出上述動力下降點初始參數(位置、速度、發動機點火時間等)的輸入后,可以根據動力下降過程的動力學模型,利用優化控制方法求解最優著陸航跡。
對于嫦娥五號月面無人自主采樣返回任務,月面軟著陸過程燃料消耗是最重要的設計因素,因此以動力下降過程燃料消耗最優軌跡作為期望軌跡進行迭代跟蹤,即首先定義描述著陸過程燃耗性能指標函數[8]:
(2)

同時,考慮著陸安全問題,定義著陸器安全著陸判據為:f=(ρ,d,r),定義為:ρeven著陸區地形平均坡度;ρmax為著陸安全能容忍最大坡度,考慮月面著陸、采樣及起飛任務安全,要求:在10 m基線(用于分析地形數據的單元尺寸,通常與地形數據分辨率密切相關,例如5 m分辨率的地形數據,通常取10 m,即兩個像元作為基線)內,坡度(地形坡面與水平面的夾角)不超過8°;di定義為著陸區內撞擊坑深度/直徑比,dmax為著陸安全及任務要求能接受的最大撞擊坑深度/直徑比,按照任務要求,坑深度/直徑比不超過0.1,i∈[1,Nc]為撞擊坑數量;r定義為著陸區內石塊豐度(石塊分布面積占整個區域面積比),rmax為著陸安全及任務要求能接受的最大石塊豐度,按照任務要求,石塊豐度不超過1%,則有:
(3)
相應地,考慮著陸安全求解動力下降過程燃耗最優的著陸軌跡問題可以描述為:min J,即:
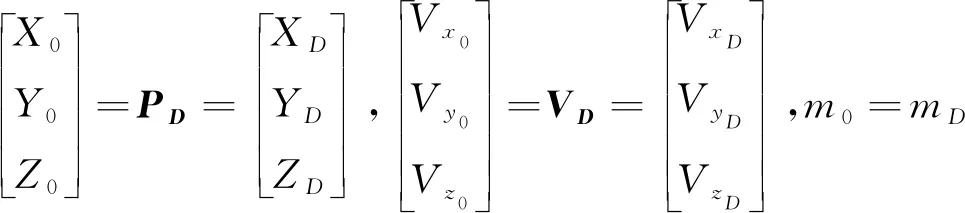
3)根據最優標稱著陸航跡的設計結果,預測最終著陸點位置P'L=[X'L,Y'L,Z'L],速度V'L=[Vx'L,Vy'L,Vz'L]。
4) 根據最終著陸點預測結果,計算與目標著陸點的著陸點位置PL=[XL,YL,ZL]及著陸速度VL=[VxL,VyL,VzL]的偏差量ΔPL、ΔVL作為修正動力下降點參數的輸入,其中:
5)根據步驟4計算的著陸點偏差,對當前軌道控制策略進行修正以調整目標著陸點,再以此遞推重新確定動力下降點。
由于對月面無人采樣返回任務,月面著陸點主要通過環月降軌控制調整月面落點緯度、通過引入近月制動法向速度增量調整月面落點經度。同時,通過優化地月轉移瞄準的近月點傾角,保證采樣點第二次穿過環月軌道面的時間,從而保證探測器月面起飛過程共面上升的測控條件[3][9-10]。
近月制動軌道調整策略:
環月降軌軌道調整策略:
式中:iLOI為近月制動后軌道傾角;ΔνLOIN為軌道調整的速度增量法向量;u為探測器的緯度幅角;ΔνLOIT為軌道調整的速度增量切向量;θLon為理論計算的著陸點經度;θLat為理論計算的著陸點緯度。
因此,嫦娥五號任務軌道調整策略設計了逐次逼近目標落點的方法,具體過程如圖6所示。其中,分別通過近月制動軌控策略設計、環月降軌(兩次)軌控策略設計,逐步“逼近”理論目標。
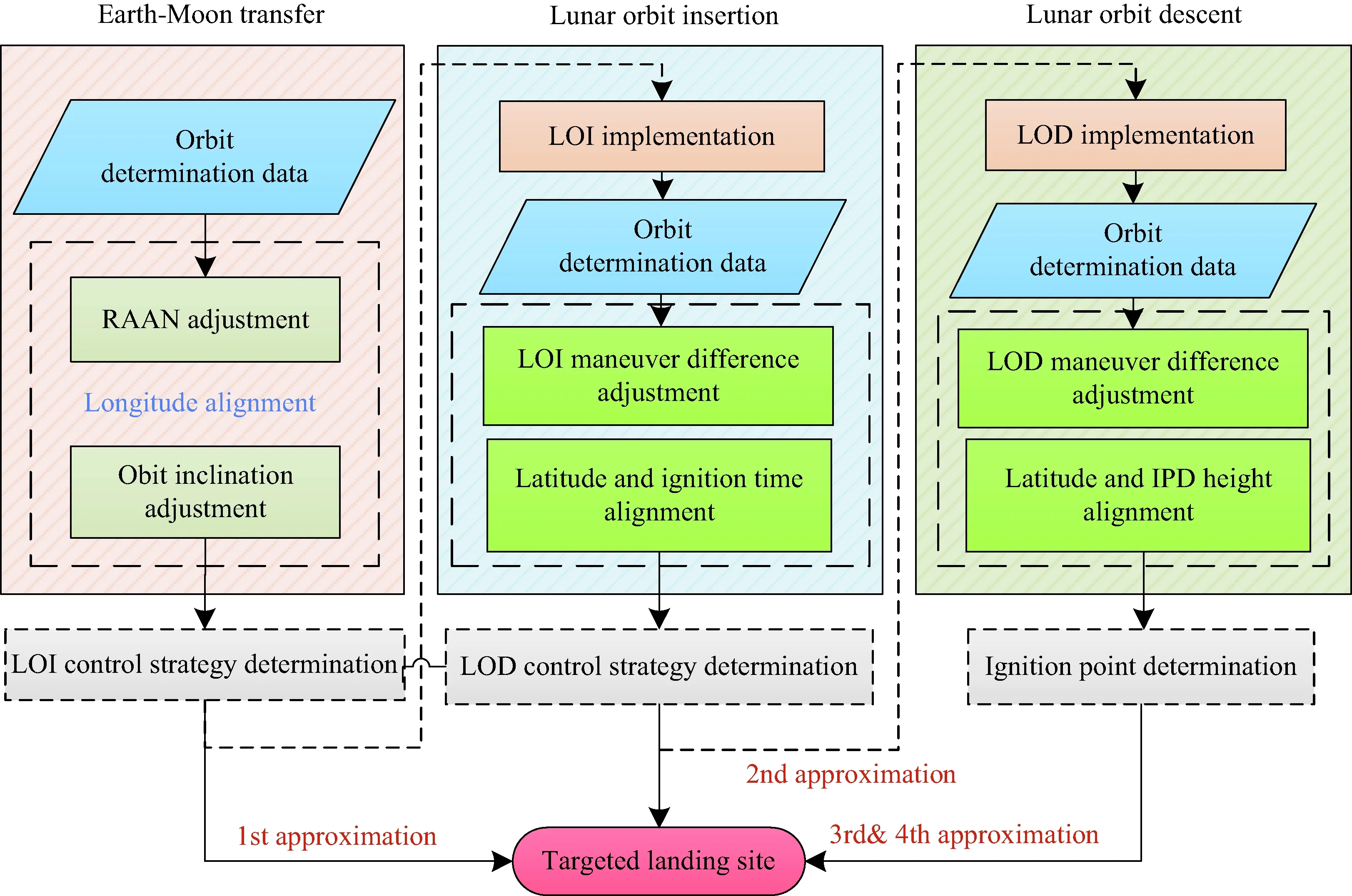
圖6 修正軌控策略逐次逼近目標流程Fig.6 Flow chart of successive approximation of trajectory maneuver control strategy design
6)迭代計算步驟1~5,最終將著陸點計算結果與理論目標的偏差縮小在閾值范圍內。
根據月面采樣任務要求,理論預估落點與目標落點月心角偏差≤0.01°,同時,探測器與月面接觸時水平速度不大于0.7 m/s,垂直速度不大于3.5 m/s,以上述條件作為動力下降點確定工作的收斂目標。
5 嫦娥五號月面軟著陸動力下降點確定實施與驗證結果
5.1 動力下降前軌道控制及動力下降點確定結果
按照嫦娥五號月面軟著陸前的任務設計,在實施動力下降前,要經過近月制動、環月降軌等環節,每次軌控執行結果會對后續軌道控制策略設計結果產生影響。相應地,每次軌道控制策略的變化會對動力下降點的確定及著陸點的確定結果產生影響。
考慮月面軟著陸任務動力下降過程實施前的軌道控制結果對動力下降點確定的影響以及月球引力攝動對不同時間軌道確定結果的影響。分別在月面軟著陸前主要的四次軌控任務后實施動力下降初始點確定,即:2020年11月25日地月轉移段四器組合體第二次中途修正后(TCM-2)、11月29日四器組合體近月制動后(LOI)、11月30日著上組合體第一次環月降軌后(LOD-1)和12月1日第二次環月降軌后動力下降前(LOI-2)。因此,不同軌道控制結果對應的動力下降點初始參數也不同,由于動力下降過程中并不具備軌道調節的能力,相應也會導致最終著陸點的結果發生變化。嫦娥五號月面無人自主采樣返回任務軟著陸前軌道控制結果對動力下降點確定結果的影響如表1所示。

表1 軟著陸前軌道控制對動力下降點確定的影響
在不同軌控任務對應的動力下降點確定后的軟著陸最優航跡仿真結果如圖7所示。
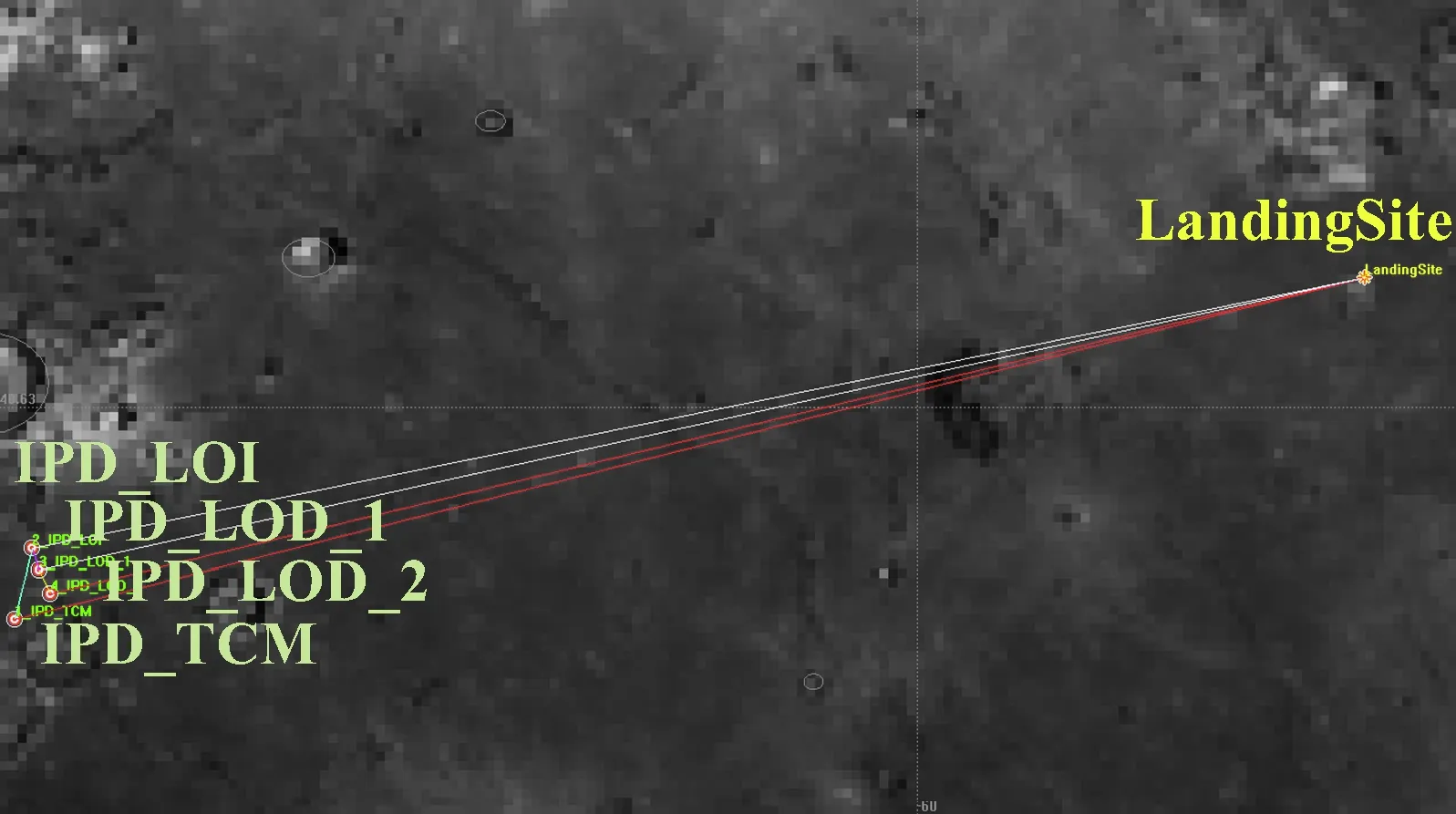
圖7 嫦娥五號在軌歷次動力下降點確定后的航跡仿真結果Fig.7 Simulation results of flight tracks with multiple ignition point determination for powered descent phase
5.2 嫦娥五號著陸及起飛安全性分析結果
由于嫦娥五號確定的采樣區位于月球正面風暴洋(Oceanus procellarum)區域,其緯度范圍為43°±2°N,經度范圍59°±10°W,如圖8所示[11]。
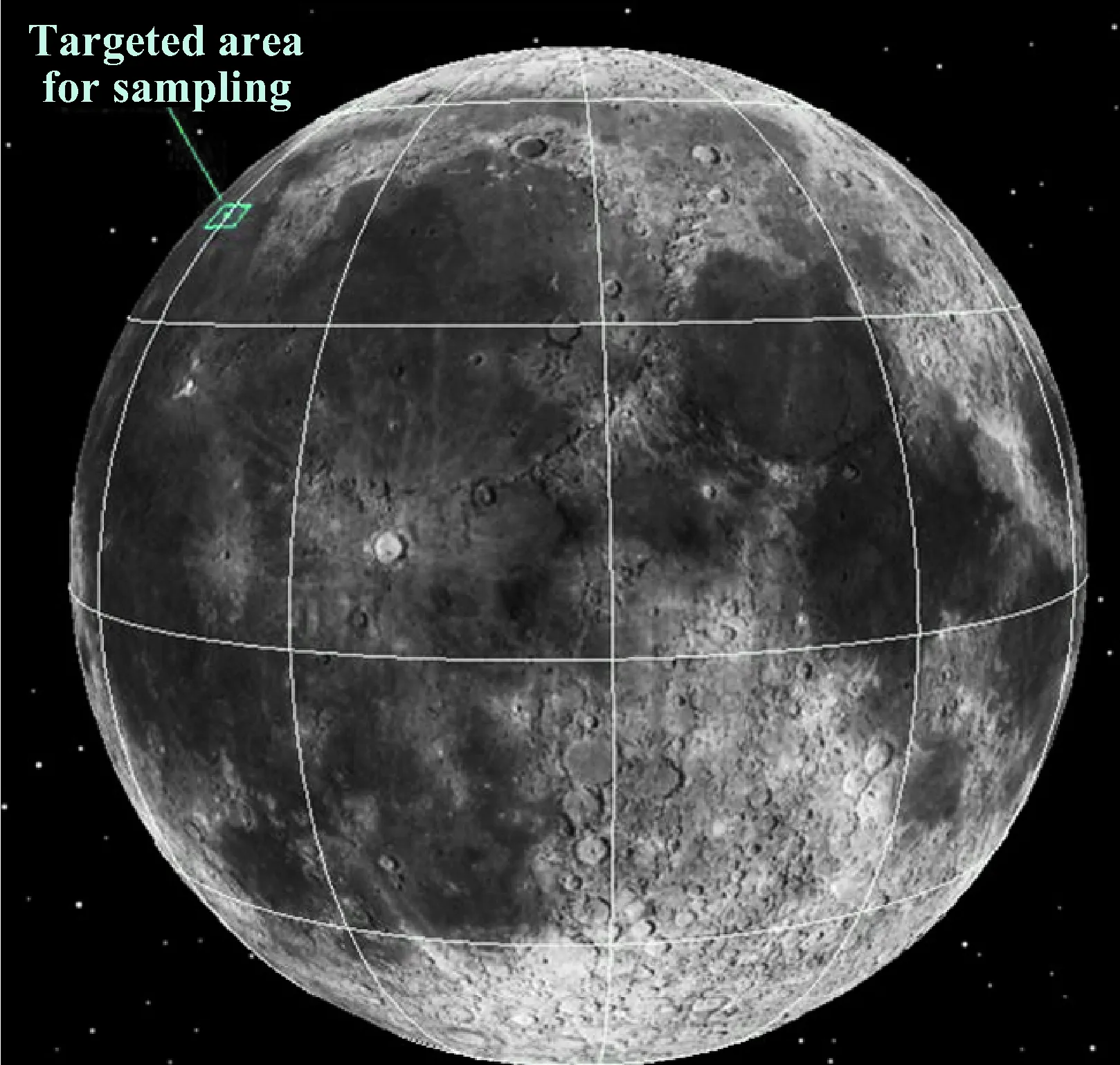
圖8 嫦娥五號探測器月面采樣區范圍示意Fig.8 Targeted area for sampling of Chang’e-5 lunar probe
根據對嫦娥五號采樣區數字地形數據的分析結果[12],該區域平均月面(距月心1 737.4 km)的地形高程范圍為-3 377 m~-1 725 m,平均高程為-2 451.91 m。平均坡度為2.73°,整體地勢較為平坦。整個采樣區撞擊坑分布情況為西部稀疏,撞擊坑坑壁平均坡度小于10°。整個采樣區內石塊呈現出“不均衡”的隨機散布狀態,并圍繞撞擊坑呈現出圓形發散的群狀分布[13-14]。結合著陸安全概率計算方法[15],在采樣區內篩選出適宜著陸的區域,如圖9所示,其中藍色區域能夠滿足本次著陸任務的安全區域。根據分析結果,采樣區內超過95%的區域都能夠滿足著陸安全性要求,這與采樣區地形的分析結果也是一致的。
根據5.1節中動力下降點確定的最終結果,同時考慮不同初始參數(如軌道確定偏差、軌控偏差、主減速發動機推力偏差等)對最終落點的影響,最終確定的著陸區范圍約為26 km×6 km。如圖10中紅色框區域所示,該區域具體范圍如表2所示。
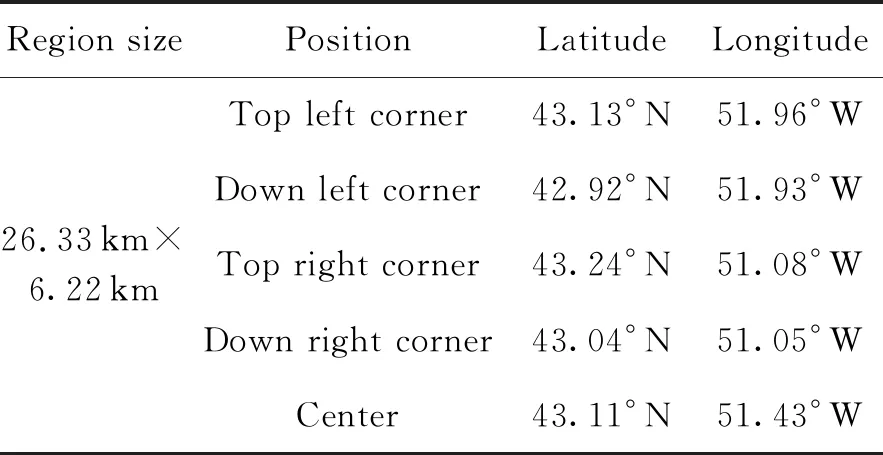
表2 動力下降點確定的目標著陸區范圍
同時結合最優著陸航跡、月面起飛航跡分析了航跡覆蓋范圍的月面地形及高程等關鍵參數,分析了月面著陸及月面起飛過程的安全性,分別如圖9、圖10所示,分析結果表明航跡所確定的區域地形能夠滿足著陸及起飛任務安全實施,可以采用。
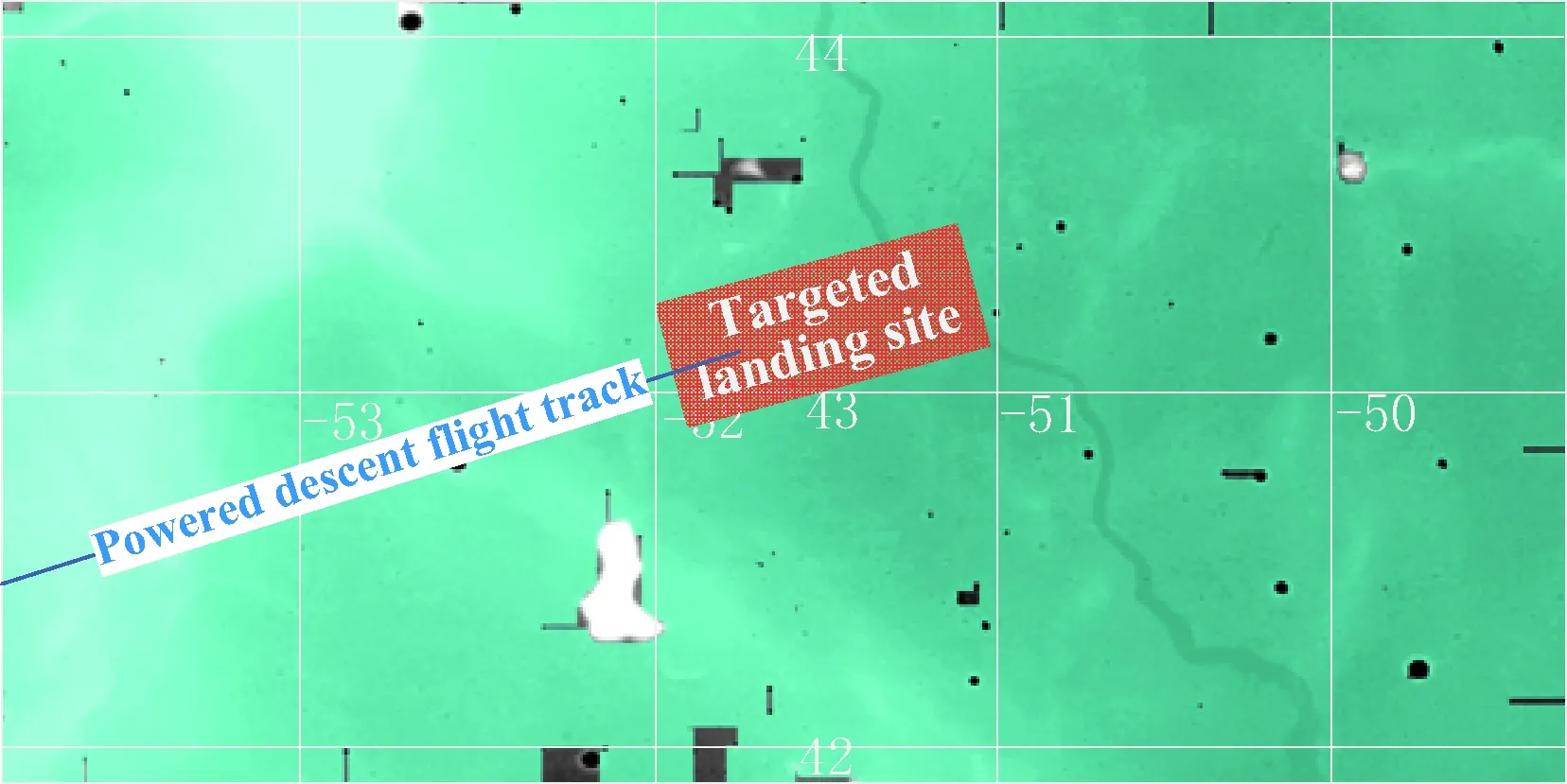
圖9 嫦娥五號動力下降航跡著陸安全性分析結果Fig.9 Safety analysis result along powered descent flight track
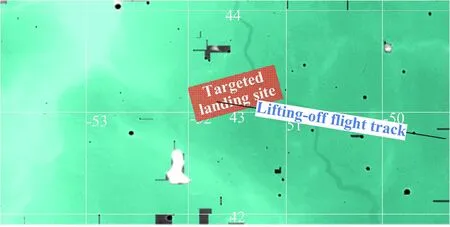
圖10 嫦娥五號起飛航跡著陸安全性分析結果Fig.10 Safety analysis result along lunar surface lifting-off flight track
5.3 嫦娥五號月面軟著陸實現結果
嫦娥五號月球探測器著陸上升組合體按照既定任務設計,于2020年12月1日22:57:17發動機開機,從動力下降點37.37° N ,76.86° W開始實施動力下降,經過了961 s的飛行,依次經過主減速段、快速調整段、接近段、懸停段、避障段、緩速下降段控制,最終于23:11:21安全著陸在既定采樣區內,著陸點位置為43.1° N,51.42° W,與動力下降前下降點確定的結果一致。而根據導航敏感器的遙測數據結果可以確定,著陸點附近的采樣區地勢平坦,著陸姿態偏差不超過2.2°,滿足后續月面采樣及起飛的任務需求。
動力下降過程航跡和月面起飛上升對應的器下點月面實際高程變化情況分別如圖11、圖12所示。在動力下降過程的航跡覆蓋范圍內,月面高程范圍為-2 728.5~-1.738 1 km,月面起飛過程高程范圍為-2 673.2~ -2 019.5 km,根據分析,航跡下月面地形能夠滿足著陸安全和月面起飛安全的要求。根據月面實際測量結果,動力下降點確定結果滿足任務要求,所使用的動力下降點的確定方法通過了有效驗證。
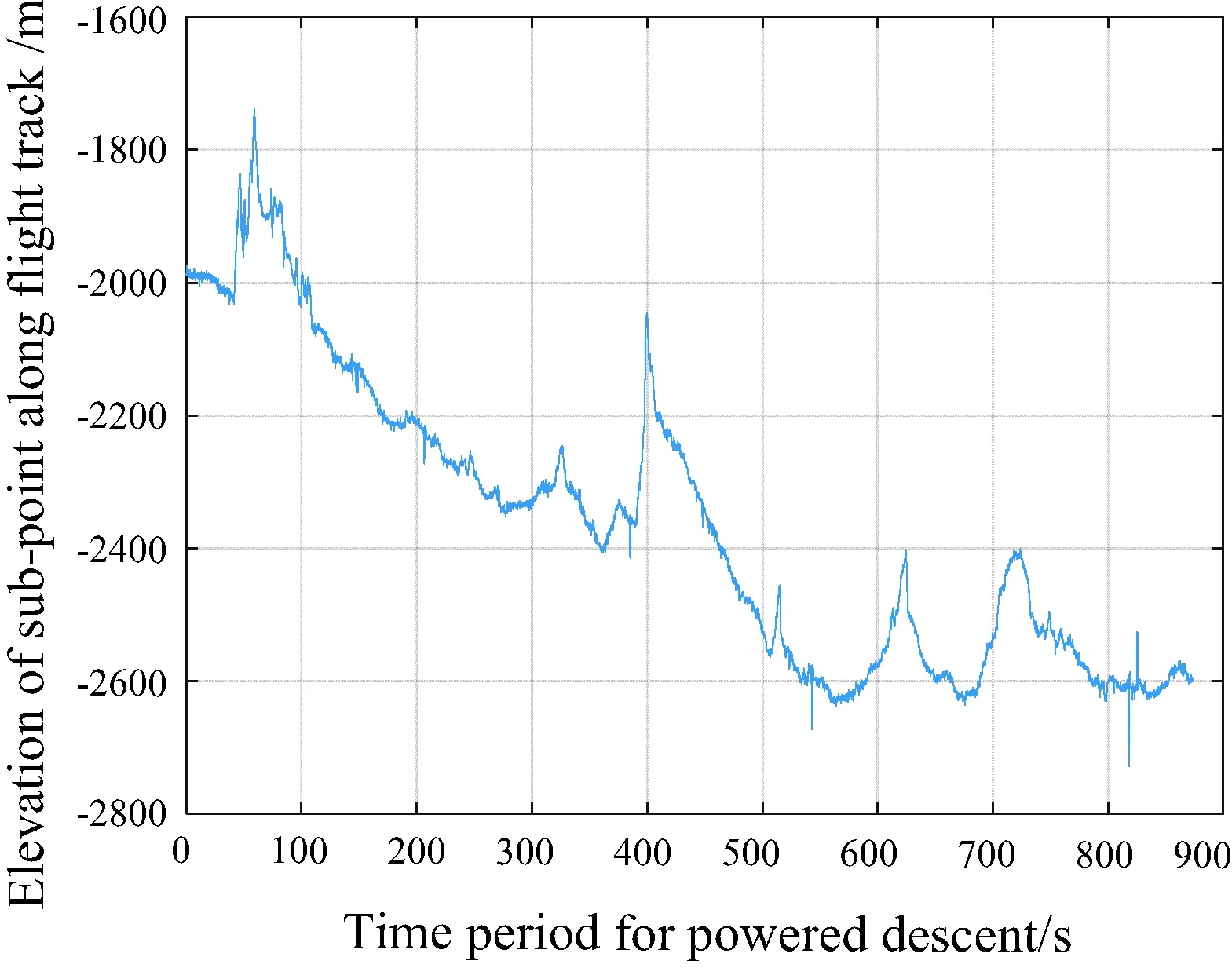
圖11 嫦娥五號探測器動力下降過程航跡器下點月面高程變化情況Fig.11 Terrain elevation change along the flight track of powered descent phase of Chang’e -5 lunar probe
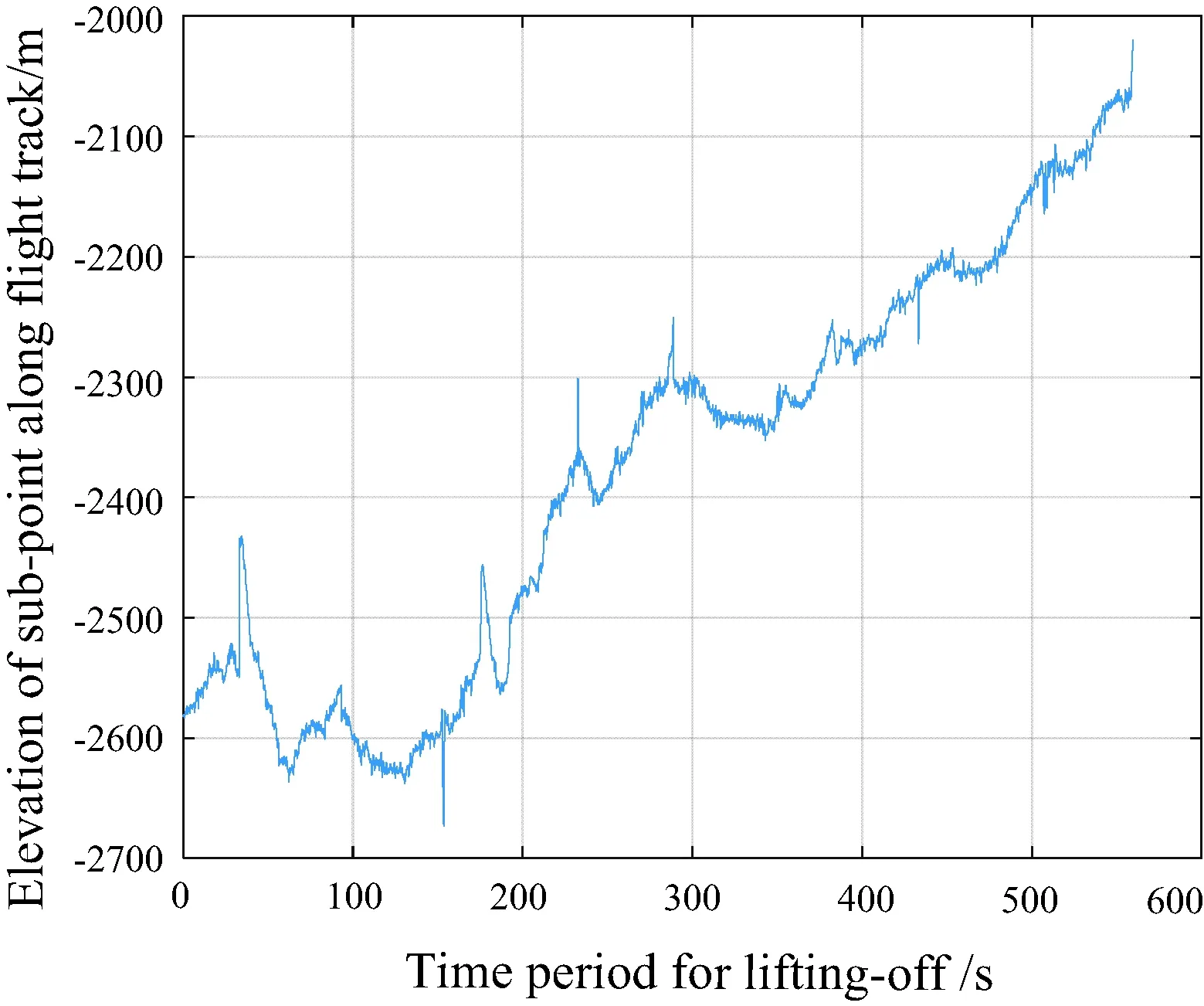
圖12 嫦娥五號探測器月面起飛過程航跡器下點月面高程變化情況Fig.12 Terrain elevation change along the flight track of lunar surface lifting-off phase of Chang’e -5 lunar probe
6 結論
本文針對嫦娥五號月面無人自主采樣返回任務設計特點,綜合月面軟著陸、月面采樣及起飛安全的需求,提出了在環月軌道基于“逐次逼近尋優方法”的月面軟著陸環節動力下降點的確定方法。在動力下降前通過多次軌道控制與最優標稱制導軌跡搜索聯合控制策略的調整方法確保了月面著陸,同時對月面著陸、月面采樣和月面起飛過程的安全性進行了確定。嫦娥五號任務進入環月軌道后,按照“逐次逼近尋優方法”在軌共實施了4次策略調整工作并確定了最后的下降點參數,最終在既定的動力下降點成功實施了月面軟著陸任務。本文提出的方法及設計的在軌實施流程經過了有效驗證,對于后續地外天體軟著陸任務,特別是地外天體表面采樣、起飛上升任務的軌控策略設計及軟著陸任務設計均具有借鑒意義。
