旱地穴盤苗取投苗機械手的設計與仿真分析
2022-01-04 13:47:18馬曉曉李曉濤周文靜張雨薇李園園
新疆農機化 2021年6期
關鍵詞:設計
馬曉曉,李曉濤,周文靜,張雨薇,李園園
(新疆科技學院信息科學與工程學院,新疆 庫爾勒 841000)
0 引言
隨著農業產業結構的優化調整,新疆辣椒種植發展勢頭強勁,已經成為新疆“紅色產業”中的重要一員[1]。據新疆統計局最新數據顯示,2019年新疆工業辣椒種植總面積為67.78 khm2,總產量達294.51萬t[2]。辣椒產業已發展成為新疆重要的經濟支柱,在新疆農業生產中占有非常重要的地位[3]。
新疆地處我國西北地區,冬季無霜期較短、氣候寒冷干燥,早春自然災害頻繁,農作物不宜早播[4]。為減少自然災害對農作物產量的影響,目前辣椒、番茄等作物種植多采用育苗移栽種植方法,有效提高了作物畝產量與果實品質,節本、增產效果明顯,其社會效益與經濟效益十分可觀[5-6]。
近年來,隨著辣椒、番茄等經濟作物移栽種植面積不斷擴大,新疆各地對移栽機械的需求量也普遍增加,但目前使用的移栽機械多為半自動移栽機,取投苗作業仍需人工完成,自動化程度低、勞動強度大、作業效率低且成本高,并沒有體現出機械移栽技術的優越性,難以在較短移栽周期內實現大面積移栽作業,嚴重制約了育苗移栽技術的發展[7-8]。研制出具有整排自動取苗、送苗和投苗功能的全自動移栽機勢在必行。
穴盤苗取投苗機械手是移栽機械的核心工作部件,其設計集農藝、機械、控制等為一體。由于農業生產環境的特殊性,應用于工業領域的機械手無法直接滿足農業作業的要求,因此,研制結構簡單、性能穩定的取投苗機械手是實現穴盤苗移栽全程自動化和智能化的前提。
本研究基于頂出—夾缽式取苗作業方式設計了一種由微型氣缸驅動的穴盤苗取投苗機械手,利用三維造型軟件Solid works創建了虛擬樣機模型,并采用ADAMS軟件進行了虛擬仿真試驗,驗證了機構設計的合理性。
1 結構組成及工作原理
1.1 設計要求
機械手的作用是將穴盤中頂出的穴盤苗缽體利用夾缽片從缽體兩側穩定夾取、移動以及投放。頂出—夾缽式取苗示意圖如圖1,具體包括如下步驟:步驟一,頂苗桿從穴盤的穴孔底部漏水孔穿過,實現穴盤苗缽體與穴盤破結,并將穴盤苗缽體頂出穴盤穴孔深度一半以上的距離;步驟二,機械手夾缽片從穴盤苗兩側靠近穴盤苗缽體,并夾緊穴盤苗缽體;步驟三,夾缽片沿穴盤垂直平面向上將穴盤苗帶離穴盤,從而完成取苗作業。
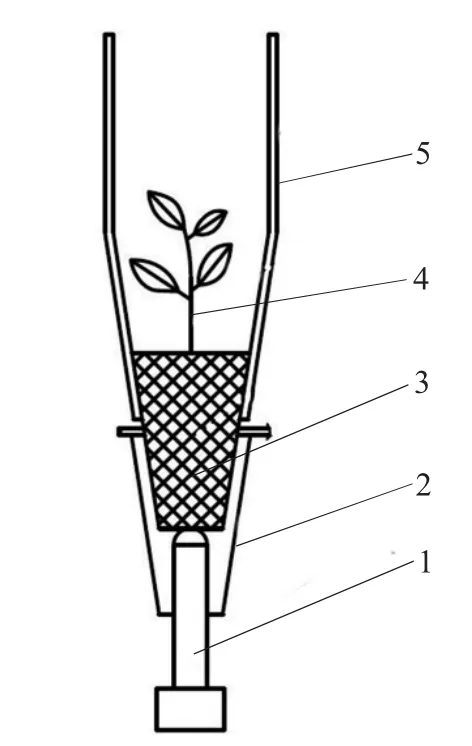
圖1 頂出-夾缽式取苗示意圖
新疆用于辣椒、番茄培育的穴盤主要為16×8=128穴塑料軟盤[9]。穴孔頂邊尺寸為32mm×32mm,底邊尺寸為16mm×16mm,穴孔錐度α=11.31°,穴孔高度為40mm。前期育苗試驗測得適栽期辣椒穴盤苗苗高平均值為141 mm,觀察發現穴盤苗缽體越往下根系越密集。根據穴盤規格及穴盤苗物理形態特性,機械手設計要求如下:
(1)夾苗時夾缽片夾持缽體深度為30mm,對應兩夾缽片末端中心距小于20mm;投苗時兩夾缽片末端中心距最小值應大于穴孔頂邊尺寸,保證夾缽片打開時缽體能順利掉落。
(2)夾缽片末端應盡量扁平,以增大與缽體的接觸面積,其折彎角度與穴孔錐度一致,保證夾苗時兩夾缽片與缽體兩側面緊密貼合。
(3)夾缽片長度要保證大于穴盤苗苗高,避免夾苗時機械手零部件對穴盤苗莖葉產生損傷、投苗時發生掛苗現象。
1.2 結構組成及工作原理
基于結構緊湊,工作原理簡單、適應性廣等機構設計理念,本研究所設計的取投苗機械手如圖2。
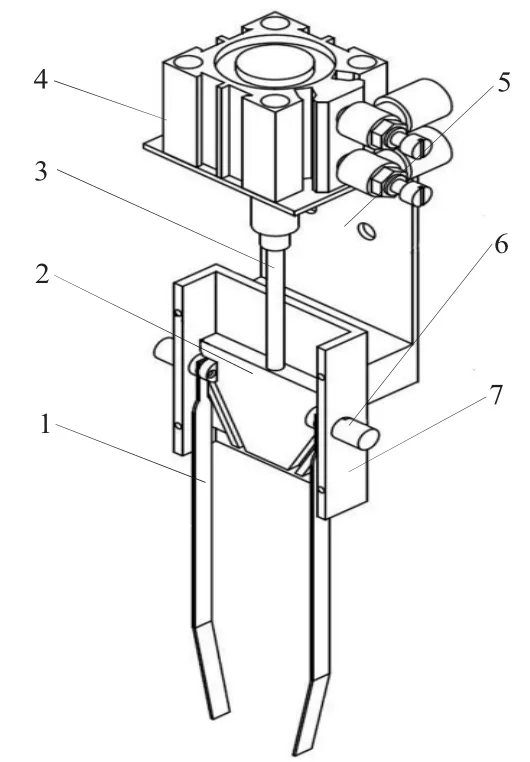
圖2 取投苗機械手結構圖
機械手包括滑塊、推桿、氣缸、支架、滑柱、滑道以及夾缽片。夾缽片上加工有圓孔,通過開槽沉頭螺釘安裝在滑柱上;滑柱對稱安裝在滑道兩側面軸孔內,圓柱面上加工有直切槽,用于安裝夾缽片,直切槽異側加工有斜切槽與斜切面,使滑柱表面形成斜凸臺,通過斜凸臺安裝在滑塊上。滑塊上表面加工有長斜槽與三角形切面,長斜槽與三角形切面中間形成長斜凸臺,長斜凸臺表面與滑塊上表面等高,長斜槽與滑柱表面斜凸臺配合,長斜凸臺與滑柱表面斜切槽配合,從而保證滑塊沿滑道移動時能夠驅動滑柱使其沿滑道側面軸孔左右移動,滑塊上表面三角形切面低于滑道側面軸孔,可避免滑塊移動時與滑柱圓柱面產生干涉。滑道內側光滑,與滑塊采用油脂潤滑,上表面左右對稱加工有螺釘孔,用于安裝滑道蓋。滑道蓋通過鈑金兩側折彎得到,其中一側左右加工有矩形孔,便于兩夾缽片移動,另一側加工有小軸孔,便于推桿移動。推桿用于傳遞動力,一端加工有外螺紋,與滑塊連接,另一端加工有內螺紋,安裝在氣缸上,氣缸安裝在支架上,用于驅動推桿往復運動,支架上方與氣缸采用螺栓連接,下方焊接在滑道下表面,側面加工有螺紋孔,用于將該機械手安裝在移栽機機架上。
穴盤苗取投苗機械手工作時,氣缸驅動推桿帶動滑塊沿滑道往復移動,滑塊向上移動時,滑柱在滑塊作用下沿滑道兩側軸孔向內移動,安裝在滑柱上的兩夾缽片相互靠近,從穴盤苗缽體兩側夾緊穴盤苗;滑塊向下移動時,滑柱在滑塊作用下沿滑道兩側軸孔向外移動,安裝在滑柱上的兩夾缽片相互遠離,從而釋放穴盤苗,使其在自身重力作用下落入栽植器。
2 取投苗機械手關鍵零部件設計
2.1 夾缽片的設計
夾缽片直接作用在穴盤苗缽體兩側,直接影響到夾缽質量。為避免夾苗時機械手對穴盤苗莖葉產生損傷、投苗時發生掛苗現象,夾缽片長度設計為180 mm;夾缽片末端應盡量扁平,以增大與缽體的接觸面積,其寬度設計為10 mm,折彎長度設計為50 mm;結合穴孔錐度α=11.31°,夾缽片末端折彎角度取整設計為11°。夾缽片材質選擇65Mn,熱處理及冷拔硬化后強度較高,具有一定的韌性和塑性。圖3所示為夾缽片結構示意圖。
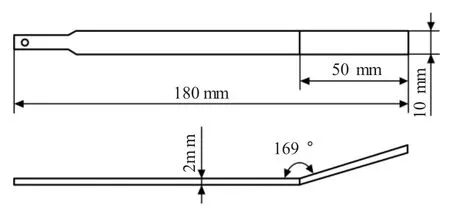
圖3 夾缽片結構示意圖
2.2 滑塊的設計
滑塊作為機械手關鍵零部件,直接影響到夾缽片的開合與機械手的結構緊湊性。結合機械手設計要求,確定兩夾缽片夾缽時末端中心距為18 mm,投苗時末端中心距為38 mm,則兩夾缽片開合間距為20 mm。
取投苗機械手氣缸選擇SDA薄型氣缸,缸徑為16 mm,行程為20mm,活塞桿直徑為6mm,氣缸推力為6kg。
圖4所示為滑塊結構示意圖。滑塊上表面長斜槽角度為α,左右兩長斜槽下部中心線距離為a,要滿足兩夾缽片開合間距為20 mm,則右側長斜槽下部中心線距滑塊右端面有效尺寸l1=10 mm;長斜槽上部中心線距滑塊下端面有效尺寸l2應等于氣缸行程,即l2=20 mm。根據公式(1)可求得滑塊上表面長斜槽理論角度α=63.43°,實際設計時長斜槽角度取整為63°,其寬度為3 mm。
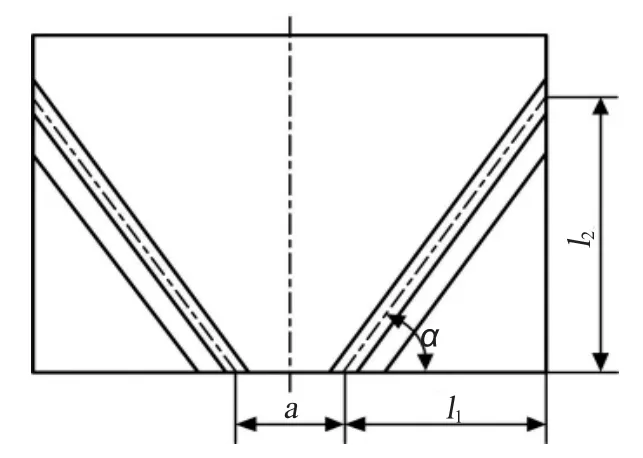
圖4 滑塊結構示意圖

考慮到兩夾缽片末端折彎長度為50 mm,折彎角度為11°,左右兩長斜槽下部中心線距離a確定為20 mm。
2.3 滑柱的設計
滑柱對稱安裝在滑道兩側面軸孔內,在滑塊驅動下沿滑道兩側軸孔移動,從而帶動夾缽片實現開合動作。
滑柱圓柱面上加工有斜切槽與斜切面,使滑柱表面形成斜凸臺,通過斜凸臺與斜切槽和滑塊上的長斜槽與長斜凸臺配合。如圖5,滑柱斜凸臺傾斜角度為63°,其寬度為3 mm,其斜切槽傾斜角度與寬度和斜凸臺一致。
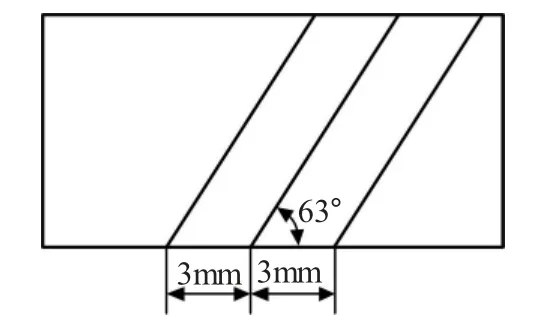
圖5 滑柱結構示意圖
3 取投苗機械手虛擬仿真試驗
3.1 建立虛擬樣機模型并導入ADAMS軟件
利用三維建模軟件Solid works對穴盤苗取投苗機械手進行設計,模型建好之后進行干涉檢查,在確定沒有干涉后將模型保存為中間格式Parasolid(*.xmt_txt,*.x_t,*.xmt_bin,*.x_b),然后導入ADAMS軟件中[10]。
在ADAMS軟件中進行取投苗機械手零件的屬性更改,包括零部件重命名和材質設置等,根據各零部件之間的相互運動關系添加約束類型,如圖6。為便于對機械手進行仿真分析,忽略對機構仿真結果無影響的零部件,如滑道蓋、螺釘等,各主要部件之間添加的約束如表1。
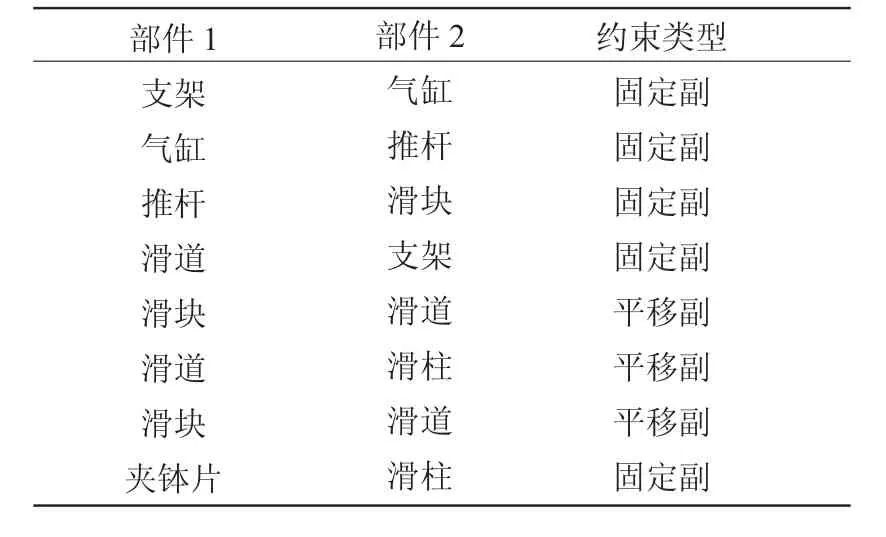
表1 仿真模型約束添加
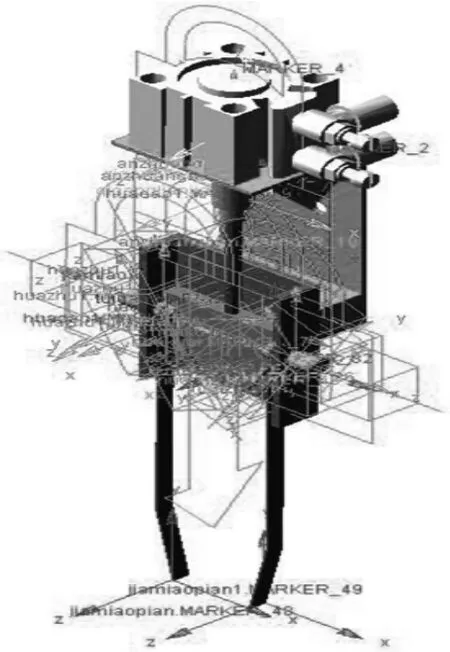
圖6 取投苗機械手虛擬樣機約束添加
3.2 取投苗機械手虛擬仿真試驗
取投苗機械手配套移栽機的栽植效率要求達到80株/min以上,本文以80株/min進行虛擬仿真試驗。機械手為整排取苗,一排共設置8個,則單個機械手每分鐘的取苗次數為n=80/8=10次,即每個機械手的運動周期為T=6 s。考慮到機械手需持苗將穴盤苗沿一定軌跡運動到栽植器上方,設置夾苗段與投苗段周期各為1 s,持苗運苗段周期為2 s,投苗后回程段周期為2 s。機械手在初始狀態下處于投苗結束段,在ADAMS軟件中設置推桿速度函數為step(time,0,0,1,20)+step(time,3,0,4,-20),利用ADAMS軟件對單個機械手運動過程進行虛擬仿真試驗,建立兩夾缽片端點的測量,得到夾缽片端點中心距隨時間變化曲線、夾缽片端點相對機械手速度變化曲線分別如圖7、圖8。
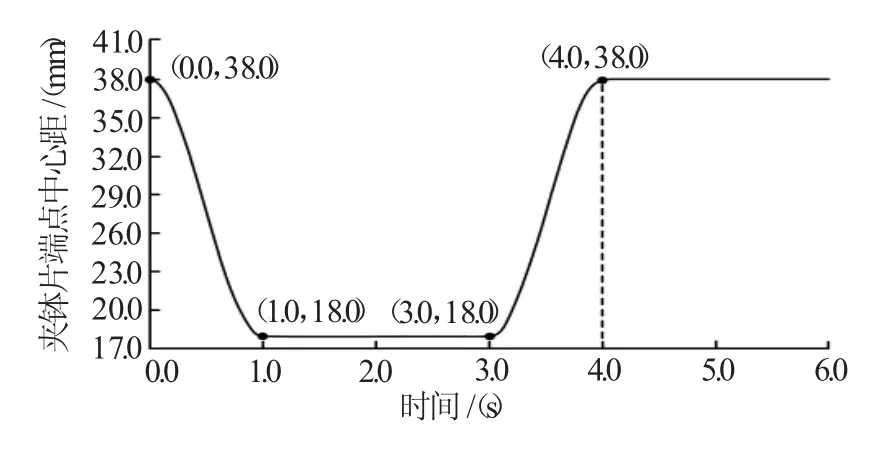
圖7 夾缽片端點中心距變化曲線
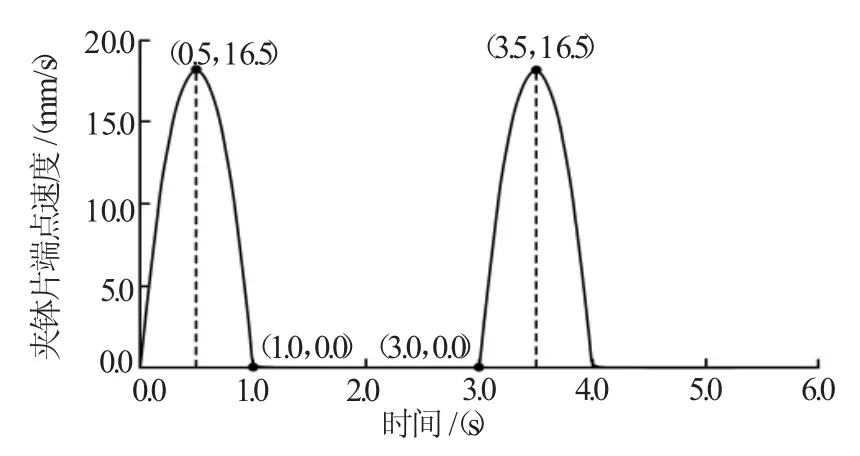
圖8 夾缽片端點速度變化曲線
觀察夾缽片端點中心距變化曲線可知,取投苗機械手在一個運動周期內經歷了夾苗、持苗及投苗三個狀態。在t=0.0 s時,兩夾缽片末端中心距為38 mm,此時機械手準備穴盤苗的夾苗動作;t=0.0 s至1.0 s過程中,兩夾缽片間距逐漸變小,t=1.0 s時,機械手完成穴盤苗的夾持;t=1.0 s至3.0 s過程中,兩夾缽片間距保持不變,此階段機械手持苗將穴盤苗運送至栽植器上方,t=3.0 s時,機械手到達栽植器上方,準備投苗;t=3.0 s至4.0 s過程中,兩夾缽片間距逐漸變大,t=4.0 s時,兩夾缽片末端中心距為38 mm,機械手完成穴盤苗的投苗;t=4.0 s至6.0 s過程中,兩夾缽片間距保持不變,此階段機械手返程,t=6.0 s時,機械手回到初始位置,準備夾苗。
觀察夾缽片端點相對機械手速度變化曲線可知,t=0.0 s至1.0 s過程中,兩夾缽片速度先增大后變小,t=0.5 s時,夾缽片速度達到最大值16.5 mm/s;t=1.0 s至3.0 s過程中,兩夾缽片速度保持不變為0,滿足穩定持苗要求;t=3.0 s至4.0 s過程中,兩夾缽片速度先增大后變小,t=3.0 s時,機械手到達栽植器上方,速度開始增大,機械手開始投苗,t=3.5 s時,夾缽片速度達到最大值16.5 mm/s,之后速度逐漸變小,t=4.0 s時,兩夾缽片末端中心距達到最大值,機械手完成穴盤苗的投苗;t=4.0 s至6.0 s過程中,機械手返程,兩夾缽片相對機械手的速度保持不變為0,t=6.0 s時,機械手回到初始位置,準備夾苗。
4 結論
(1)設計了一種適用于整排式全自動移栽機取投苗機械手,依據機構原理對機械手關鍵零部件進行了參數設計,機械手可完成自動夾苗、穩定持苗及投苗作業,工作原理簡單,結構緊湊。
(2)設計了投苗機械手虛擬樣機模型,并通過ADAMS軟件進行了虛擬仿真試驗,結果表明夾缽片可以靈活實現開合動作,兩夾缽片端點中心距變化滿足取投苗作業要求,仿真分析結果與理論分析結果相一致,驗證了機械手理論分析與結構設計的合理性。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
