基于改進DRNN的機電作動器PI控制方法研究
2022-01-05 10:51:22趙世超趙東標支程昊
微特電機 2021年12期
趙世超,趙東標,支程昊
(南京航空航天大學 機電學院,南京 210016)
0 引 言
機電作動器(以下簡稱EMA)由于其質量輕、靈活性高、控制精度高、維護方便且在運行過程中噪聲小等優點,近年來在各類航空航天飛行器中得到越來越廣泛的應用[1]。EMA的工作環境往往比較復雜,給系統的穩定運行帶來了很大的挑戰,因而對EMA伺服系統高性能控制策略的研究就顯得尤為關鍵[2]。
EMA作為一個非線性、多變量、強耦合的伺服系統,采用傳統的控制方法難以滿足其復雜工況下的性能要求。近年來,各種先進的非線性控制方法得到迅速發展,神經網絡控制由于其強非線性擬合能力,已然成為該領域的研究熱點。文獻[3]設計了一種神經網絡與滑模控制相結合的方法,利用神經網絡觀測系統集總不確定性,提高了航空作動器控制器的參數適應性和抗干擾能力。文獻[4]將BP神經網絡與PI控制方法結合,用于電梯用永磁同步電機的調速控制,改善了電梯的快速性和舒適性。文獻[5]提出一種基于單神經元的永磁同步電機解耦控制策略,實現了d-q軸電流解耦,使系統具有快速的響應能力和良好的靜態性能。
由于對角遞歸神經網絡(以下簡稱DRNN)動態特性可以很好地對非線性時變系統進行控制[6],本文為改善EMA系統控制性能,將DRNN與PI控制相結合,使得DRNN在系統運行過程中可以實時調整PI的最佳參數;同時,設計了一種自適應學習率方法,使控制器的學習能力和在線修正能力得到了提高。仿真實驗表明,改進后的DRNN-PI控制方法增強了EMA速度環的響應能力和抗干擾能力,并改善了EMA整體系統的靜、動態性能。
1 EMA系統數學模型
1.1 EMA機械傳動模型
EMA根據其作動形式可分為旋轉式和直線式,本文的EMA采用直線式作動形式,其結構簡圖如圖1所示,以永磁同步電機(以下簡稱PMSM)作為驅動電機,通過離合器、滾珠絲杠將旋轉運動轉變為推桿的直線運動,進而帶動舵面、起落架等實現期望運動[7]。
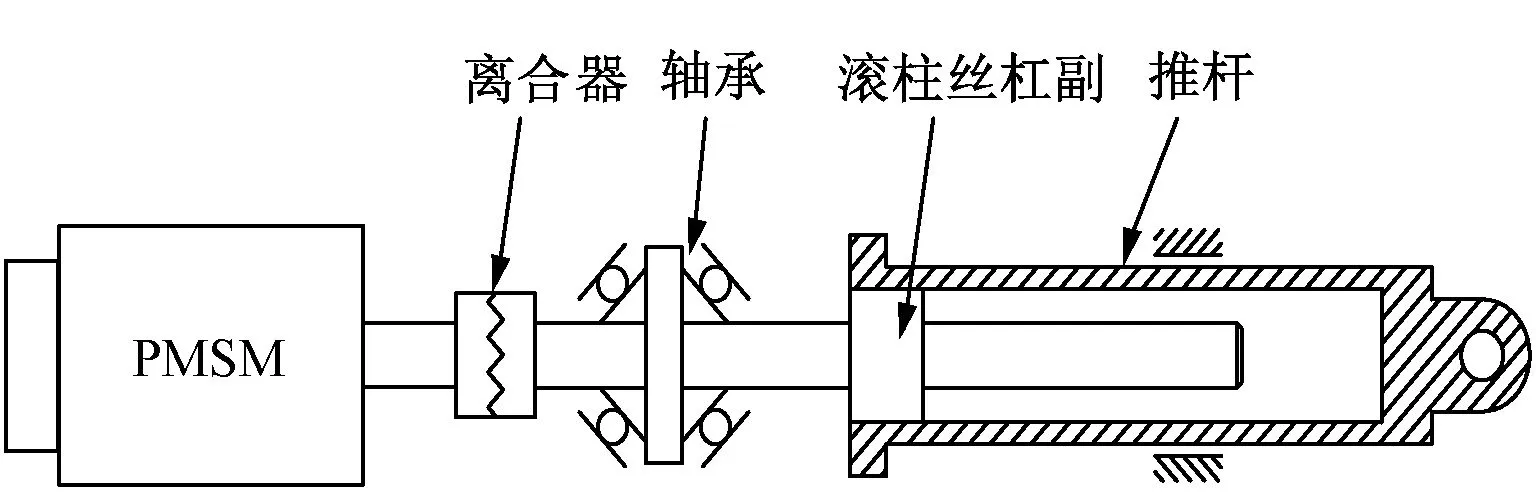
圖1 EMA機械傳動結構
采用彈簧-阻尼-質量模型對EMA結構等效簡化,由歐拉定律,建立EMA的數學模型如下:
(1)
式中:J為負載折算到電機的轉動慣量;θ為電機位置輸出量;Te為電機的電磁轉矩;B為作動器系統折算到電機的粘性阻尼系數;TL為負載轉矩。
1.2 PMSM數學模型建立
本文EMA驅動電機選用表貼式PMSM,假設磁路不飽和,忽略磁滯和渦流損耗,磁場空間呈正弦分布,在d-q軸系有如下數學表達式:
(2)
式中:id,iq為定子繞組在同步旋轉坐標系下的電流分量;ud,uq為定子繞組在同步旋轉坐標系下的電壓分量;Rs,L=Lq=Ld分別為定子的電阻和電感;ωr為轉子的電角速度;ψr為轉子永磁磁鏈;p為極對數。
2 DRNN-PI控制器設計及改進
2.1 DRNN-PI控制器原理
DRNN與BP神經網絡相近,由輸入層、隱含層和輸出層組成,不同點在于前者在隱含層增加了自反饋環[8],其網絡結構如圖2所示。
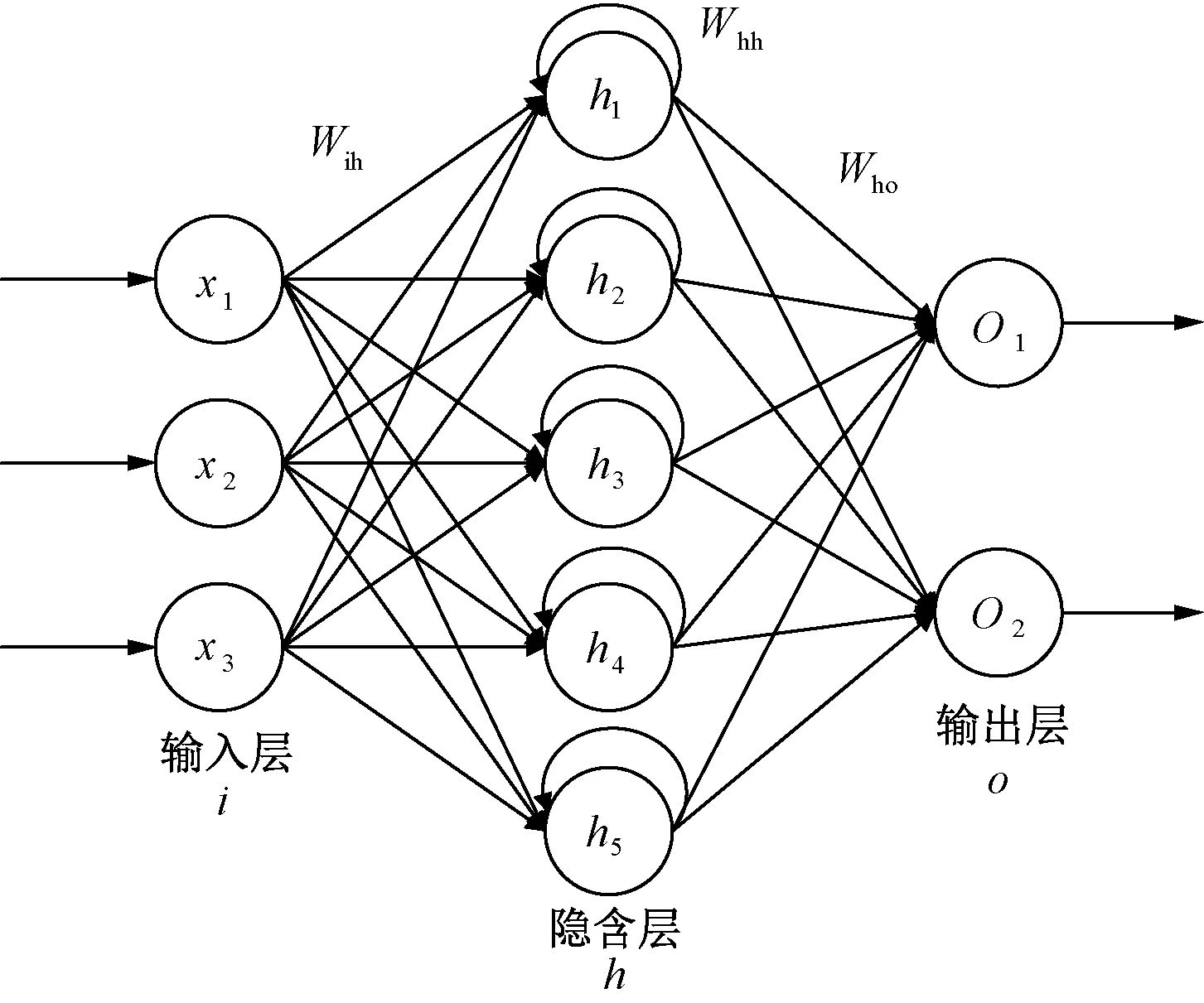
圖2 DRNN結構
DRNN輸入層單元接收輸入信號,隱含層接收輸入層信號及其自反饋信號,經激勵函數傳遞給輸出層計算完成前向傳播;然后根據輸出層輸出結果與期望值誤差進行反向傳播,動態調整網絡連接權值,從而使得輸出層結果不斷趨近于期望值。
增量式PI控制算法輸出表達式:
u(k)=u(k-1)+Kp[e(k)-e(k-1)]+Kie(k)
(3)
式中:e(k)和e(k-1)分別為控制器最近2次所采集的系統誤差;u(k)為控制器k時刻輸出;Kp和Ki為控制器增益參數。

(4)
式中:ωih為輸入層連接隱含層各神經元間的權重;ωhh為隱含層自反饋連接的神經元權重。σ(·)為隱含層激勵函數,在此選取雙曲正切函數,其表達式如下:
(5)
(6)
式中:ωho為隱含層連接輸出層各神經元間的權重;輸出層輸出為控制器增益參數Kp和Ki,分別對應:
(7)
由于增益參數均為非負值,故選取輸出層激勵函數為非負Sigmoid函數,其表達式如下:
(8)
經上述前向傳播可得到控制器所需的增益參數,進而根據式(3)得到控制器輸出量作用于PMSM,使得EMA產生相應動作。DRNN的學習基于反向傳播算法,將誤差信號沿前向傳播路徑反傳,從而調整各神經元間的權重值,使得系統誤差不斷減小。定義系統的性能指標函數如下:
(9)
式中:r(k)為系統期望值;y(k)為實際值。對于本文的EMA伺服控制系統而言,r(k)即為速度環控制器期望值,y(k)為實際的PMSM轉速。
采用最速梯度下降法對網絡權重值進行調整,其調整公式如下:
(10)
式中:η為學習率;α為使得搜索快速收斂的慣量因子。
據上式,可得輸出層到隱含層各神經元間的權重調整公式如下:
(11)
式中:?Δu(k)/?y(k)未知,本文在此采用近似計算方法,利用符號函數sgn(·)對其近似替代,由此帶來的計算不精確影響可以通過調整學習率進行補償[9-10]。則該項可表示如下:
(12)
(13)
(14)
式中:
(15)
2.2 學習率自適應優化
由DRNN學習算法可知,學習率η的選取直接決定了DRNN的收斂速度和學習效果。當學習率η的選取較大時,理論上可以提高神經網絡的收斂速度,但是可能會引起權值在最優點附近振蕩,從而影響控制器的控制效果[11],導致電機轉速在一定范圍內振蕩,不利于EMA伺服系統的穩定運行。學習率選取較小,雖然可以避免上述情況的發生,但同時也會影響DRNN的收斂速度,在應對復雜環境時可能無法及時對控制器參數進行調節,從而也會一定程度上影響控制器的性能。因此,提出一種自適應學習率的方法來替代固定學習率,以期兼顧系統的穩定性和快速響應能力。調節公式如下:
(16)

同時,注意到采取上述自適應學習率調整公式時,不可避免地導致學習率最終仍處于一個相對較小的值,在面對轉速突變時,無法保證權值的及時調整。因此,采取下式對學習率進行修正:
(17)
式中:η0為修正學習率,當k時刻的轉速誤差值減k-1時刻的誤差值大于閾值Δω時,便激活式(17)對學習率進行修正。
2.3 基于改進DRNN的PI控制器
結合自適應學習率優化的DRNN與PI控制器對EMA速度環進行控制,其控制框圖如圖3所示。
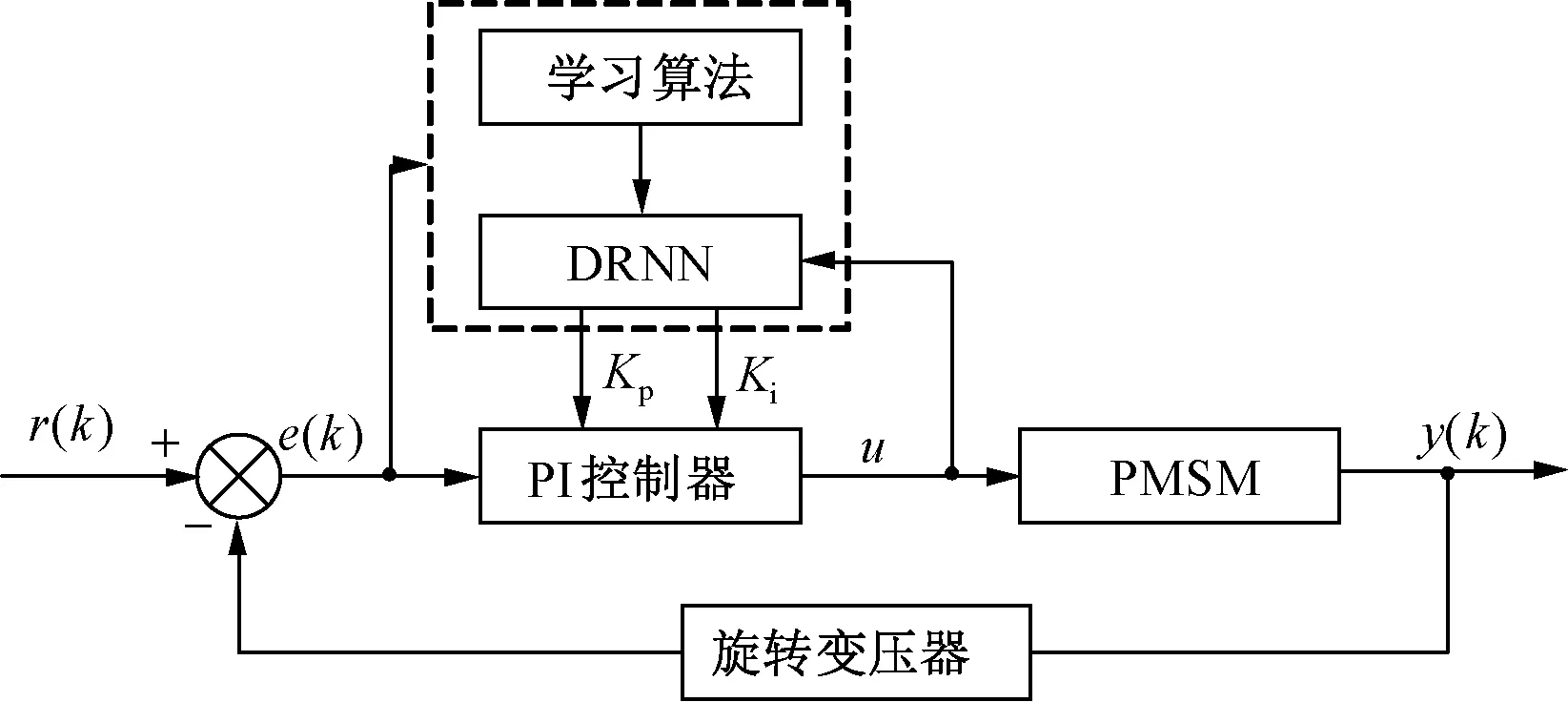
圖3 DRNN-PI自適應控制框圖
算法流程如下:
(1)確定DRNN神經網絡結構,初始化權重值,選取合適的學習率和動量因子,令k=1;
(2)采樣得到k時刻輸入量r(k)和輸出量y(k),并計算得到偏差量e(k);
(3)輸入e(k)、e(k)-e(k-1)和u(k-1)到DRNN中,計算得到輸出量,即Kp和Ki;
(4)根據式(3)計算得到該時刻控制輸出u(k);
(5)計算當前時刻學習率,根據反向傳播公式調整網絡權值系數,實現自適應控制;
(6)令k=k+1,返回步驟(2)。
3 仿真實驗
為了驗證上述系統的控制性能,在Simulink中搭建了改進前后DRNN-PI控制、模糊-PI控制以及傳統PI控制的EMA伺服控制系統,進行仿真對比研究。EMA主要參數如表1所示。
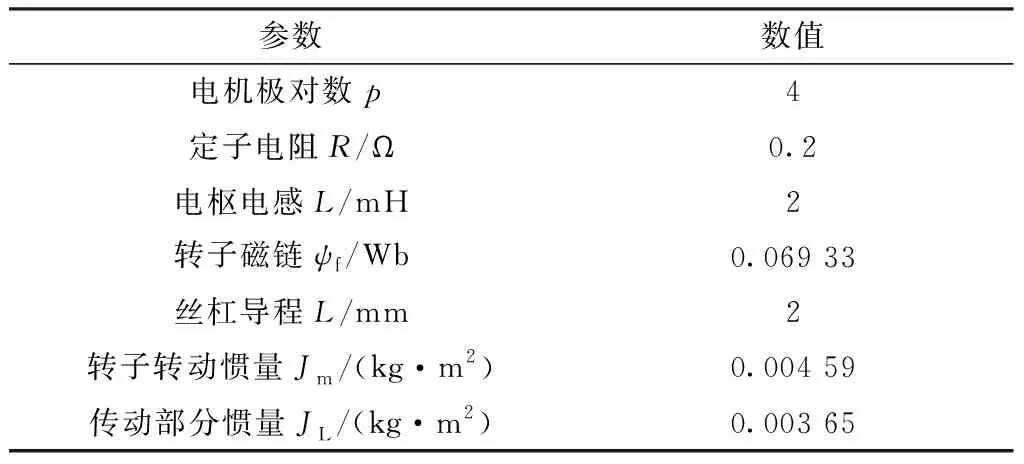
表1 EMA主要參數
對于傳統的PI控制方法,轉速環和電流環均采用PI控制器,速度環的PI參數為kpv=10,kiv=200;d、q軸電流PI控制參數均為kpd=5,kid=300。DRNN的初始權值為[-0.5,0.5]的隨機數,學習率η=0.002 ,縮放因子β=1×106,γ=0.9,修正學習率η0=0.001;電流內環控制器的參數與PI控制下的參數一致。
(1)轉速跟蹤:初始給定電機轉速為2 500 r/min;在0.15 s時轉速設定為3 000 r/min;在0.3 s時設定轉速為1 500 r/min。仿真結果如圖4所示。
從圖4可以看出,采用傳統PI控制算法跟蹤轉速變化會出現較大的超調量,超調量近100 r/min,采用DRNN-PI控制方法時超調量較小,模糊-PI沒有明顯的超調,但其穩定時間較長,達到0.1 s,而采用改進DRNN-PI控制時可以達到幾乎無超調并且可以更快地達到穩定轉速。
(2)額定轉速下突加突卸負載:給定電機額定速度3 000 r/min,在0.2 s時,加10 N·m的負載,在0.4 s時卸掉負載。仿真結果如圖5所示。
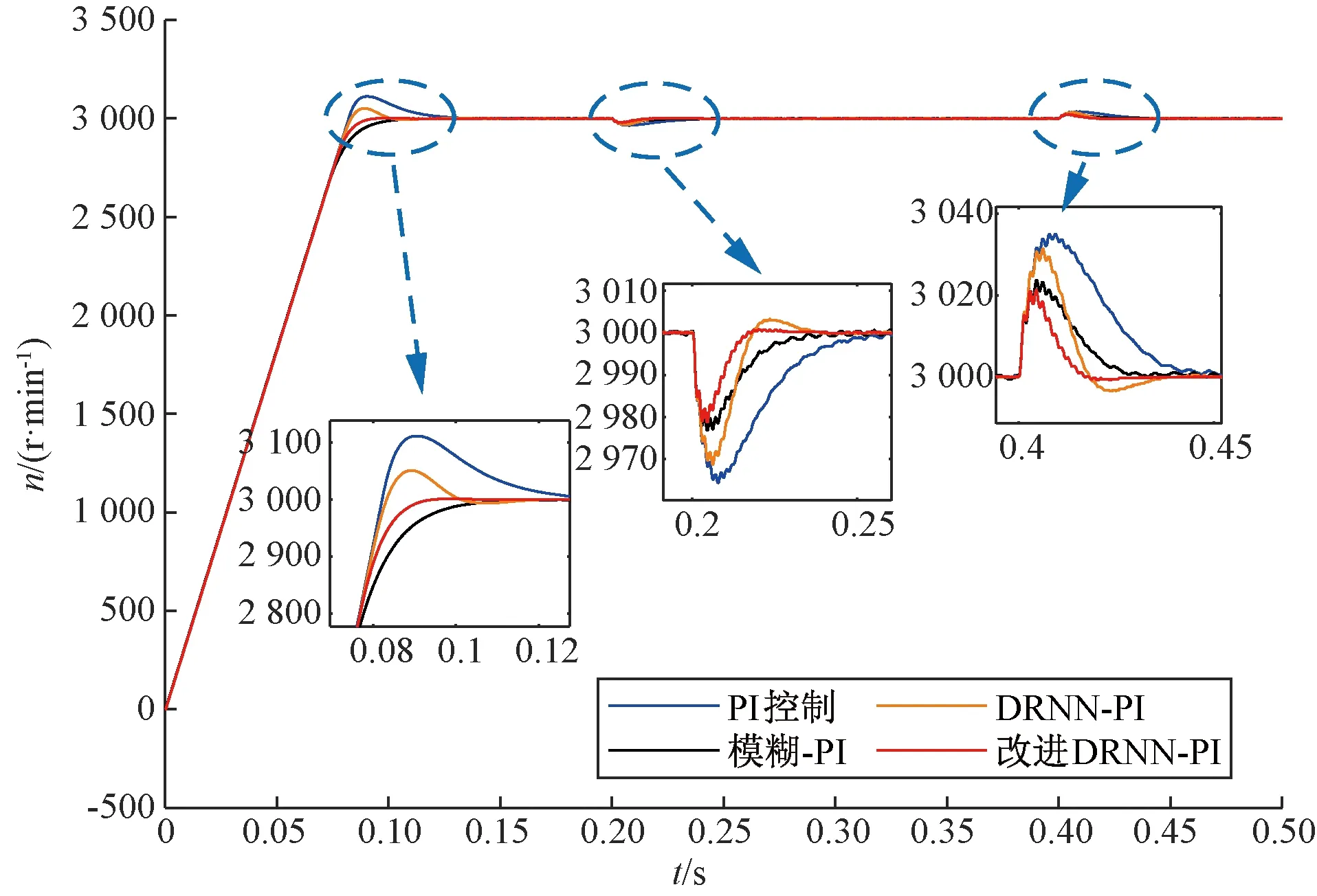
圖5 額定轉速下各控制算法突加突卸載荷曲線圖
從圖5的仿真曲線可以看出,采用傳統PI控制算法,轉速出現3.3%的超調,在負載突變時,轉速出現35 r/min的變化,且需約0.05 s的時間恢復轉速;對于改進前后的DRNN-PI控制算法而言,可以看出轉速的超調量、負載突變時的轉速變化和恢復時間均有所減少;其中改進后DRNN-PI控制算法可以實現轉速幾乎無超調,達到額定轉速,負載突變時轉速變化量較改進前減少約5 r/min,恢復時間縮短0.01 s;模糊-PI在負載突變時轉速變化量與改進DRNN-PI相近,但其恢復時間更長,約0.04 s。由此可見,改進DRNN-PI具有更快的響應能力和更強的抗干擾能力。
(3)為驗證控制算法在EMA伺服系統中的整體性能,給定EMA位置階躍信號為20 mm,并引入如圖6所示的隨機變負載干擾(0~3 N·m)。其中,EMA位置環采用比例控制,為方便對比,比例參數均取相同的值,仿真結果如圖7所示。
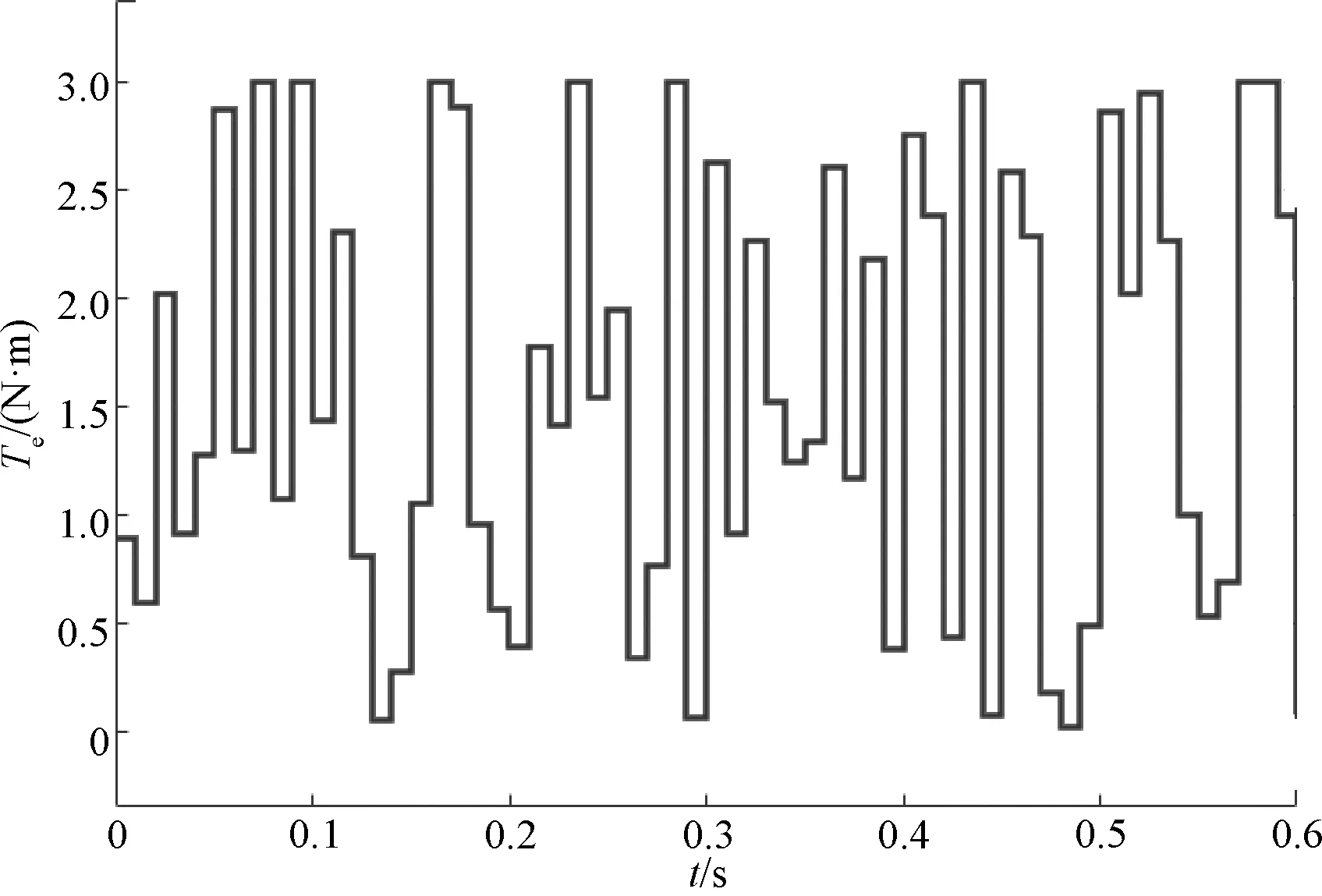
圖6 負載轉矩隨機變化曲線
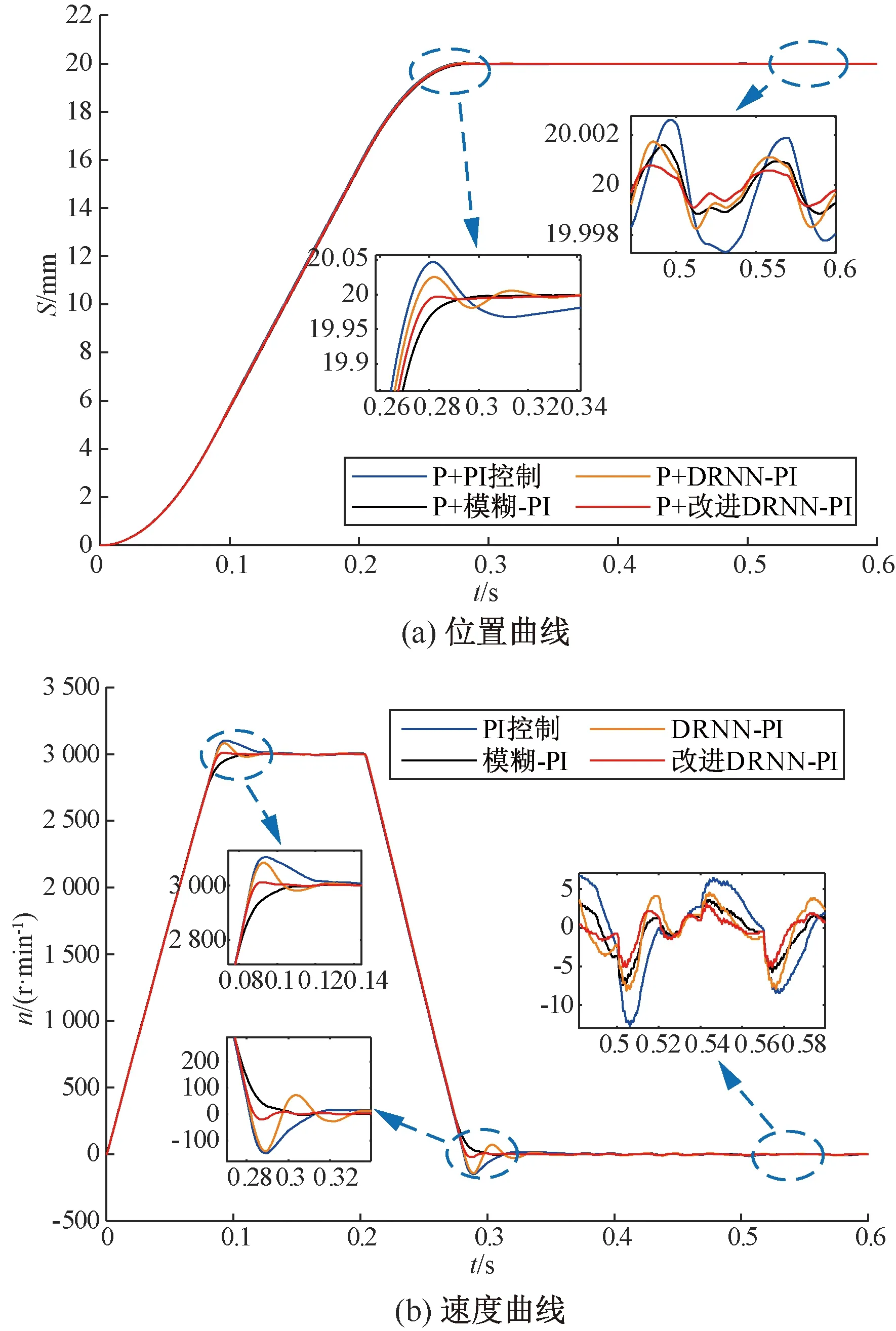
圖7 給定20 mm位置階躍下各控制算法響應曲線
從圖7(a)可以看到,內環采用傳統PI和DRNN-PI控制時,其位置響應均產生超調,采用模糊-PI和改進DRNN-PI控制算法均未出現明顯位置超調,系統可以平滑地達到指定位置,但模糊-PI的響應速度較慢;且EMA到達指定位置時,在隨機負載干擾下,內環采用改進DRNN-PI可以使得EMA位置波動更小。圖7(b)是對應EMA位置階躍20 mm下電機轉速響應變化,可以看到,內環采用模糊-PI和改進DRNN-PI算法使得電機轉速變化具有更小的超調量,但模糊-PI達到穩定轉速所需時間較改進DRNN-PI約長0.02 s,且在轉速平穩時,改進DRNN-PI受隨機負載影響轉速波動更小,具有更強的抗干擾能力。由上述可知,內環采用改進DRNN-PI控制算法能夠改善EMA伺服控制效果,使EMA伺服控制系統整體性能表現更好,魯棒性更強。
4 結 語
本文針對EMA速度環設計了一種DRNN與PI相結合的控制方法,考慮學習率對控制性能的重要影響,引入自適應學習率來動態調整DRNN的權值,提高了控制器學習能力和在線修正能力。仿真結果驗證了改進DRNN-PI控制方法在響應能力和抗干擾能力方面均優于傳統PI控制、模糊-PI以及固定學習率的DRNN-PI控制方法,增強了EMA整體系統的穩定性和魯棒性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
