基于滑模自抗擾的永磁同步電機控制
2022-01-15 09:47:48李祥飛鄒莉華
湖南工業大學學報 2022年1期
周 楊,李祥飛,鄒莉華,陳 玄,印 陽
(湖南工業大學 電氣與信息工程學院,湖南 株洲 412007)
1 研究綜述
永磁同步電機(permanent magnet synchronous motor,PMSM)因其構造簡單、維修方便和能量轉化率高等特點,在現代工業自動化生產中逐漸取代交流異步電機。隨著現代控制理論的不斷發展,更多的先進控制策略被應用到以矢量控制技術為控制框架的永磁同步電機調速系統中來[1-5]。其中,自抗擾控制(active disturbance rejection control,ADRC)作為一種新型的控制策略,具有原理簡單、魯棒性強、無需知道被控對象的具體數學模型等優點,引起了眾多學者的關注。自抗擾控制分為線性型和非線性型,線性自抗擾法待整參數少,但是控制精度及魯棒性相對非線性都表現較差,而非線性自抗擾法中存在待整參數多且物理意義不明的缺陷,給其工程化應用帶來巨大困難[6]。因此,非線性自抗擾法中的參數整定與優化顯得尤為重要。文獻[7]在永磁同步電機速度環上設計出一種無參數整定的自抗擾控制器(no manual tuned active disturbance rejection control,NMT-ADRC),采用該控制器后,能夠在電機本體參數攝動及外部負載擾動的條件下表現出良好性能。文獻[8]剖析了非線性自抗擾控制抗擾原理,分析了各參數對永磁同步電機系統動穩態性能的影響,并總結出參數調節規律。改進后的算法能在低速甚至零速條件下實現對電機的優良控制;此外,在低速條件時,使用跟蹤微分器(tracking differentiator,TD)處理位置信號,可減小噪聲干擾、提高控制精度。文獻[9]對永磁同步電機結構及數學模型進行了深入研究,設計了一種實際工程上可實現的參數整定方法,通過改進擴張狀態觀測器(extended state observer,ESO)提高觀測器效率;仿真和實驗結果都表明,該方法在機械角階躍響應、隨機負載響應條件下,與傳統方法相比具有更好的動靜態性能及魯棒性。
滑模變結構控制(sliding mode control,SMC)是一種特殊的非線性控制算法,其根據系統狀態位置變化進行控制,具有響應速度快、抗擾動能力強的特點。文獻[10]通過在雙冪次趨近律后面增加一個自適應變指數項,設計出一種改進型冪次趨近律;采用此趨近律設計的滑模控制器能加速永磁同步電機起動和增加抗擾動能力。文獻[11]結合被控電機數學模型提出了一種改進型指數趨近律,通過在等速項系數前增加速度誤差絕對值,能在不增加可調參數的條件下,使電機狀態變量收斂速度加快,削弱滑動狀態下的抖振,提升電機控制性能;文獻[12]利用傳統指數趨近律及線性滑模面,構建出滑模自抗擾(sliding mode active disturbance rejection control,SM-ADRC)控制器,其能減少電機非線性自抗擾法參數、增加電機系統的魯棒性。
本文結合文獻[11]與[12],研究一種改進滑模自抗擾控制算法;通過將線性滑模面與改進指數趨近律相結合,使非線性自抗擾法參數減少且物理意義更加明確,從而簡化參數整定。其中,選用線性滑模面能保證電機狀態變量處于滑動狀態時呈指數收斂;改進指數趨近律則可以保障電機狀態變量能快速進入滑模面,同時能減小滑動狀態下的抖振帶寬度,降低抖振對電機的損傷。使用Simulink 搭建永磁同步電機系統仿真,發現改進滑模自抗擾控制算法相較于非線性自抗擾控制法及滑模自抗擾控制法,其起動特性、抗負載擾動能力、變速適應能力、減小抖振能力均表現出更好的效果,能顯著提高電機控制品質。
2 傳統速度環控制器
20世紀末,我國著名學者韓京清研究員首次提出自抗擾控制思想,其核心理念起源于比例積分微分(proportional-integral-differential,PID)控制。非線性自抗擾控制器由跟蹤微分器、擴張狀態觀測器和非線性誤差反饋控制律(non-linear state error feedback,NLSEF)構成[13]。其組成示意圖見圖1。

圖1 非線性自抗擾控制器的組成示意圖Fig.1 Non-linear ADRC controller diagram
基于轉子兩相旋轉d-q坐標系下的永磁同步電機運動方程為

式中:n為轉子電角速度;ψf為永磁體磁鏈;p為電機極對數;TL為負載轉矩;J為轉動慣量;iq為交軸電流分量。
令b=1.5p2ψf/J,電機系統總擾動理論值f=pTL/J,則式(1)可以寫成

根據式(2)及自抗擾控制的基本原理與構成[13],設計出永磁同步電機速度環非線性自抗擾控制器,其結構分為3 部分。
1)根據電機給定輸入轉速設計的跟蹤微分器,其狀態方程為

式中:n1為給定輸入轉速n*的跟蹤信號;n2為n*的微分信號;γ為速度因子。
2)利用電機外部實際電角速度建立擴張狀態觀測器,其狀態方程為

式中:x1為實際轉速n的觀測值;x2為f的觀測值;β1、β2為誤差校正增益;fal(ε,α,δ)為非線性函數,表達式為

其中,ε為誤差;α為非線性因子,其取值范圍為0<α<1,當其取值為1 時,整個控制器則化為線性型;δ為濾波因子。
3)將跟蹤微分器輸出的速度跟蹤信號與擴張狀態觀測器中的速度觀測信號做差,進行非線性PID組合,使電機速度控制器變成標準積分串型,非線性誤差反饋控制律的形式為
式中:iq0為設定控制量;i*q為q軸電流參考值;β3為誤差增益。
3 改進的速度環控制器設計
根據傳統速度環控制器及滑模控制器設計原理及步驟[14],對式(4)所示擴張狀態觀測器進行改進,則式(4)可以改寫如下:
式中g(ε)為最優控制函數。
采用g(ε)代替非線性函數fal,減少待整參數。對電機轉速及電機系統總擾動理論值構建如下誤差方程:

對誤差方程兩邊同時進行求導,將式(2)、式(7)代入后可得:

根據式(8)構建如下線性滑模面方程:

式中:c為滑模面參數,且c>0,線性滑模面能保證電機狀態變量在滑動狀態下快速收斂;同時采用如下滑模趨近律[11]:

式中k、q均大于零。
為分析趨近律的抖振問題,將趨近律離散化一個采樣周期T后可得:

若電機狀態變量處于滑模面s>0 一側,則到達滑模面有s(λ)=0+’,因而下個周期:

同理可得s<0 一側的為

綜上,文獻[11]切換帶帶寬為

同理可得,傳統指數趨近律切換帶寬為

對比式(15)與式(16)可發現,式(16)中缺少誤差絕對值|ε1|,其帶寬是一個常數值,會形成一個固定寬度的抖振帶,而式(15)的帶寬理論上會隨著|ε1|收斂至0,故能減小抖振。
對式(10)滑模面方程兩邊求導,將式(9)、(11)代入式(10)中,則最優控制函數g(ε)表達式為

將式(17)代入兩邊求導后的式(10)得:

構建李雅普諾夫函數對二階滑模自抗擾觀測器的穩定性進行分析,其數學形式如下:

由李雅普諾夫穩定條件可知,二階滑模自抗擾觀測器的穩定條件需要滿足,同時,永磁同步電機中總擾動理論值f為一個有界分量,則有
當有參數k≥η/|ε1|時,則有,即改進擴張狀態觀測器滿足李雅普諾夫穩定性條件,能夠保證電機狀態變量在有限時間內收斂到平衡點附近。
綜上所述,可得二階滑模自抗擾觀測器的最終形式如下:
為進一步簡化參數整定,同理,對非線性誤差反饋控制律中含有fal函數部分進行改進,將式(6)變化為滑模誤差反饋控制律,其形式如下:
式中,f(ε)同最優控制函數,選用s=c1ε2作為滑模面,且c1>0。
同理,對滑模面兩邊同時進行求導,并采用所提滑模趨近律,結合式(22),則滑模設定控制量為

滑模設定控制量的穩定性分析與二階滑模自抗擾觀測器相同;為進一步減小傳統開關函數在電機狀態變量進入滑動狀態的抖振問題,文章采用飽和函數sat(s)代替傳統開關函數,當電機狀態變量進入邊界層后,由原來的開關函數變為連續函數,故可以減弱抖振帶,其表達式如下:
式中ρ為邊界層厚度。
從式(21)與(23)中可看出,與非線性自抗擾法相比,改進滑模自抗擾算法中只要整定k、q、c、k1、q1、c1、ρ共7 個參數,比非線性自抗擾法少一個;k、k1、q1、q的取值決定著電機狀態變量從相平面任意位置收斂進入滑動狀態的速度快慢,k、k1、q1、q取值越大,收斂速度越快,但k、k1過大會增大抖振帶寬度,所以要合理分配k、k1、q1、q數值;c、c1值決定著電機狀態變量從滑模狀態收斂到平衡點附近速度快慢,c、c1值越大,收斂越快;邊界層厚度ρ取值偏小,能減小電機轉速的穩態誤差,但會增大在滑動狀態下的抖振帶,給電機造成損傷;如果取值偏大,能減小抖振帶,但會增加穩態誤差,所以邊界層厚度選擇同樣重要;從以上分析可以得出,滑模7 個參數選取有著相對更明確、具體的物理含義,參數調節起來更加方便;同滑模自抗擾法相比,由于采用改進型指數趨近律,不增加可調參數就可加快系統響應速度、減小滑模抖振。改進滑模自抗擾控制器結構如圖2所示。
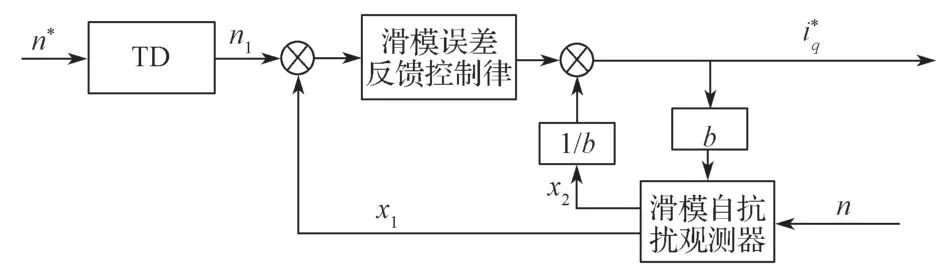
圖2 改進滑模自抗擾控制器的組成示意圖Fig.2 Improved sliding mode ADRC composition diagram
4 仿真結果與分析
采用Matlab/simulink 仿真對改進滑模自抗擾算法的可行性進行驗證,仿真結果與PI 控制及非線性自抗擾法及滑模自抗擾法進行對比;永磁同步電機的電流環均采用PI 控制,且參數相同,保障電流內環具有快速性;永磁同步電機本體參數見表1。

表1 PMSM 仿真參數Table 1 PMSM simulation parameters
以表貼式永磁同步電機作為研究對象,采用=0的解耦控制策略,永磁同步電機調速系統控制拓撲結構如圖3所示。
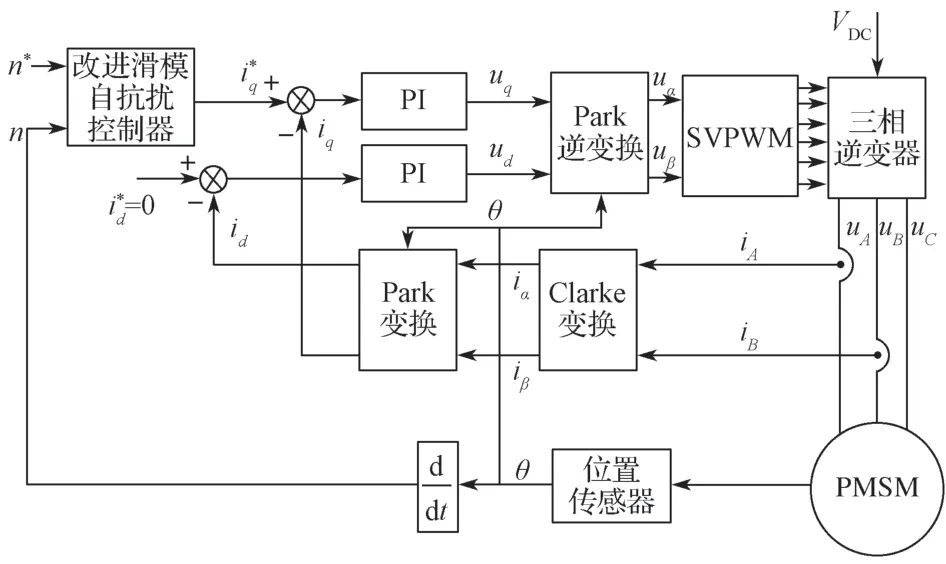
圖3 永磁同步電機調速系統控制的拓撲結構圖Fig.3 Topology diagram of PMSM speed control system
為驗證改進滑模自抗擾算法中|ε1|與飽和函數sat(s)對滑模抖振的削弱能力,在電機空載條件下,分別給定電機低速70 r/min 和高速800 r/min,得到滑模自抗擾法與本研究方法對比結果,如圖4所示。
從圖4的高低速對比圖可以明顯看出,電機在達到給定轉速后,改進滑模自抗擾算法與滑模自抗擾法相比,抖振幅度較小,輸出曲線更為平滑。
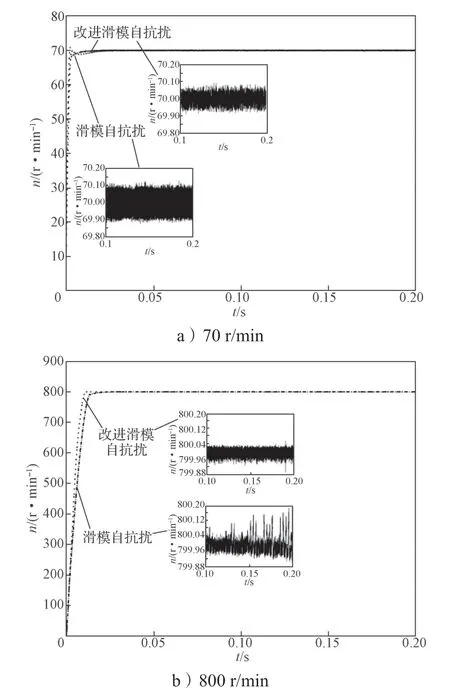
圖4 不同速度下的滑模抖振結果對比Fig.4 Comparison results of sliding mode buffeting at different speeds
為驗證改進滑模自抗擾制控算法對時變轉速的跟蹤能力,給定電機的初始轉速為400 r/min,在0.10 s時將轉速增加至800 r/min,4 種控制算法對比的仿真結果如圖5所示。

圖5 變速跟蹤性能對比曲線Fig.5 Variable speed tracking performance comparison curves
從圖5中可以得知,在變速的動態條件下,改進滑模自抗擾算法與其余3 種控制算法相比,能夠更準確、快速、無超調地跟蹤上給定速度,具有良好的動態性能。
為驗證改進滑模自抗擾算法在低速條件下的性能,現給定轉速為70 r/min,不同控制方法在此速度下的性能曲線如圖6所示。現結合圖6及圖4a 可以看出,改進滑模自抗擾算法在低速條件下,具有快速跟蹤和抖振小等優點,即改進滑模自抗擾的起動特性比其它3 種控制算法更優越。
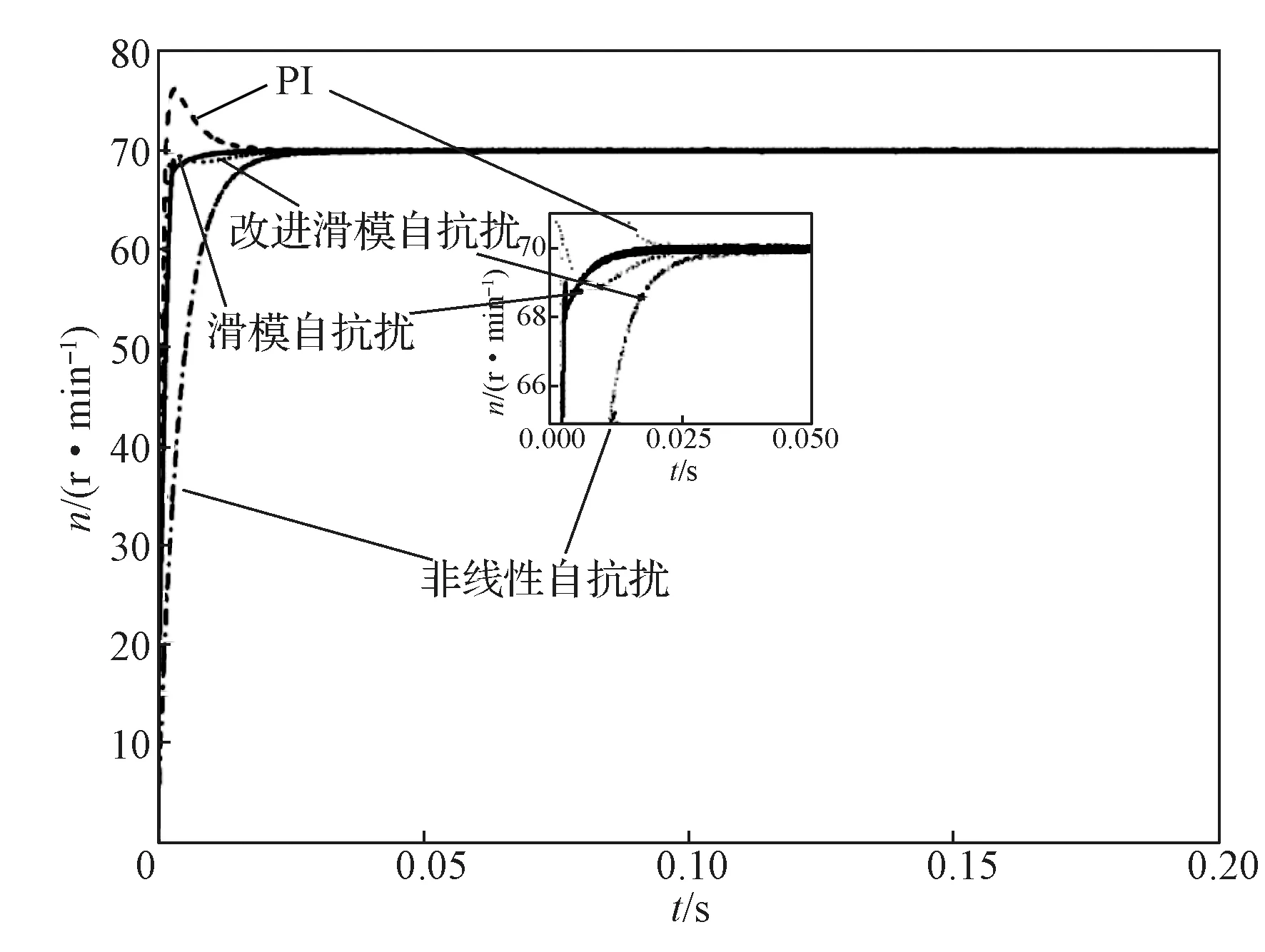
圖6 低速條件下不同控制方法的性能對比曲線Fig.6 Performance comparison curves of differentcontrol methods at a low speed
圖7為電機處于800 r/min 的高速條件下,于0.10 s 時加入5 N·m 的負載擾動波形,從圖7可以看出,改進滑模自抗擾算法在高速條件下也能實現對轉速無超調、快速跟蹤;且在加入負載擾動后,其轉速脈動小且恢復時間最短,表現出很強的抗擾動能力。
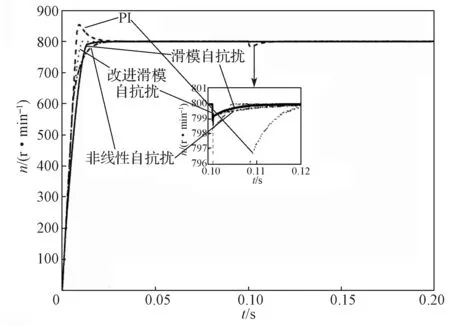
圖7 高速條件下不同控制方法的性能對比曲線Fig.7 Performance comparison curves of different control methods at a high speed
圖8為永磁同步電機在4 種控制算法下的電磁轉矩響應曲線。從圖8可以看出,與另外3 種控制算法相比,采用改進滑模自抗擾控制算法的電磁轉矩在電機起動后,能夠在最短時間內無脈動進入穩態;在0.10 s 時加入負載后,同非線性自抗擾法及滑模自抗擾法一樣,能快速、準確地跟蹤參考值,且在0.10 s 時的轉矩微分沖擊最小,而PI 控制則需要一定的時間才能再次跟蹤;改進滑模自抗擾算法與滑模自抗擾法相比,在0.05~0.20 s 時段,電磁轉矩曲線明顯更光滑;因此,改進滑模自抗擾算法能降低永磁同步電機調速系統的電磁損耗,進一步提高永磁同步電機調速系統的控制品質。
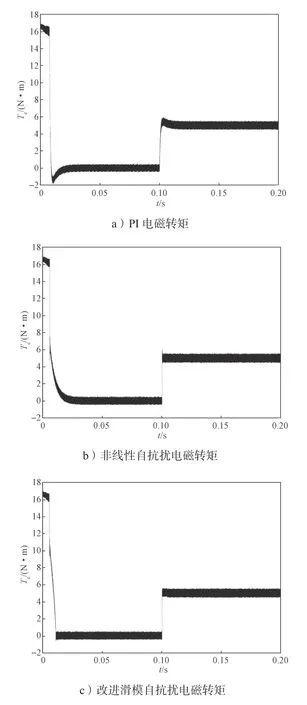

圖8 不同控制方法的電磁轉矩對比Fig.8 Comparison of electromagnetic torque between different control methods
5 結語
針對永磁同步電機采用非線性自抗擾法存在待整參數多且物理意義不明的情況,研究了一種改進滑模自抗擾算法,并將該算法在變速、低速、高速、外部負載擾動等復雜工況下進行了仿真對比及滑模抖振校驗。結果表明,該算法既能克服PI 控制快速性與超調之間的固有矛盾,還能保留非線性自抗擾法抗負載擾動能力強的優點,同時減小滑模抖振;因此,該算法能進一步提升永磁同步電機的控制效率、優化調速性能。
