動基座重力梯度儀加速度計標度因數一致性調整方法
2022-01-15 08:16:52張海洋李城鎖向民志
中國慣性技術學報 2021年5期
關鍵詞:測量
李 達,張海洋,李城鎖,向民志,高 巍,李 中,5
(1. 哈爾濱工程大學 智能科學與工程學院,哈爾濱 150001;2. 天津航海儀器研究所,天津 300131;3. 近地面探測技術重點實驗室,無錫 214035;4. 信息工程大學 地理空間信息學院,鄭州 450001;5. 中船集團航海保障技術實驗室,天津 300131)
重力梯度是重力矢量的空間變化率,在礦產資源勘探、地球科學研究和慣性導航等領域具有重要意義[1,2]。重力梯度儀是用于測量重力梯度的精密設備,Bell Aerospace公司提出的基于旋轉加速度計測量原理的重力梯度儀是迄今唯一實用的近地表動態重力梯度儀[3]。它通過對稱反向安裝的加速度計抵御載體水平線運動對重力梯度測量的影響,然而地表附近真實重力梯度異常微弱,通常在十幾到幾百E量級(1 E=10-9s-2),而10 E的重力梯度在相距100 mm的兩點只能產生約為10-10g的引力加速度差異,這對于核心敏感元件加速度計與儀器動態適應性構成了嚴峻挑戰[4]。旋轉加速度計式重力梯度儀通過機械旋轉的方式將重力梯度信號調制到敏感器輸出信號旋轉頻率的二倍頻分量上,有效降低了對加速度計零位漂移與測量分辨率的要求。而在動態重力梯度測量中,對稱反向安裝的加速度計間微小的標度因數差異會使得載體水平線加速度進入重力梯度敏感器輸出信號,形成測量誤差[5]。為實現高精度重力梯度動態測量,要求對稱反向安裝的兩組加速度計間標度因數不一致性優于0.1 ppm以內[6],這對加速度計間標度因數不一致程度提出了嚴苛的要求。
為此,諸多研究人員提出了加速度計標度因數調整方案[7,8],分別采用不同的調整方案取得了較好的控制效果,但絕大多數控制方案只是針對靜態下的加速度計標度因數調整,而在動態下如何應對載體運動干擾的問題缺乏深入研究。尤其在航空測量中,受空中橫風及大氣湍流影響,搭載飛機經常出現線加速度短期波動,影響調整回路工作。針對上述問題,本文提出基于Sage-Husa自適應濾波的加速度計標度因數調整方法,實時調整濾波參數以適應不同測量工況下的載體運動干擾,提高加速度計標度因數一致性調整精度。
1 誤差機理與標度因數調整回路
1.1 測量原理
如圖1所示,旋轉加速度計式重力梯度儀主體儀器由重力梯度敏感器和慣性穩定平臺兩個關鍵組件構成。重力梯度敏感器用于完成重力梯度張量水平分量的測量;慣性穩定平臺則用于承載重力梯度敏感器,為動態重力梯度測量提供穩定的動力學環境,抑制載體角運動對測量的影響,同時將重力梯度敏感器穩定在地理坐標系下。如圖2所示,重力梯度敏感器基于加速度計位置差分的測量原理,通過機械旋轉的方式將旋轉中心處的重力梯度張量水平分量調制到系統旋轉頻率的二倍頻處,重力梯度敏感器輸出信號與重力梯度張量水平分量之間的關系可表示為[9]:

圖1 旋轉加速度計式重力梯度儀主體儀器構成示意圖Fig.1 Schematic diagram of measurement principle of gravity gradient sensor
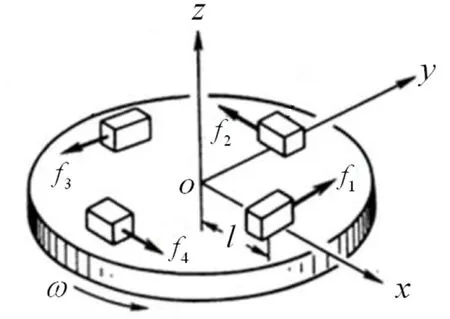
圖2 重力梯度敏感器測量原理示意圖Fig.2 Schematic diagram of measurement principle of gravity gradient sensor

式中,ai(i= 1,2,3,4)是第i只加速度計敏感軸方向的比力,l是加速度計檢測質心到旋轉中心的距離,Γuv、Γxy是對應方向的重力梯度張量分量(其中單位是E(1 E=10-9s-2),ω是旋轉圓盤的旋轉角速率。進行動態測量時,慣性穩定平臺采用三環固定指北半解析式控制方案,在隔離載體角運動的同時,將重力梯度敏感器穩定在地理坐標系,為重力梯度測量提供測量方向基準。
1.2 加速度計標度因數調整回路
針對高精度重力梯度測量需要兩組加速度計標度因數不一致性達到0.1 ppm量級的要求,Metzger E H首次提出了加速度計標度因數一致性調整方案[10],具體實施思路為:(1)在加速度計表體磁路中設置調整機構,通過控制標度調整電流實現加速度計標度因數在線調整功能;(2)由技術設計和工藝控制保證配對的加速度計標度因數初始差異不大于1‰;(3)傾斜敏感器使重力分量在敏感器X方向形成常值分量,激勵兩組加速度計標度因數不一致信息調制在旋轉頻率的正余弦分量上,再通過同步解調提取;(4)對標度因數不一致信息進行PID校正,控制加速度計表體調整電流,實現加速度計標度因數實時調整功能。
靜態條件下,加速度計標度因數的變化緩慢,因此容易通過調整PID校正環節的參數實現3#、4#加速度計標度因數跟蹤1#、2#加速度計。而在動態條件下,載體水平加速度是時變的,通過解調提取的兩路加速度計標度因數不一致信息存在動態誤差,導致PID校正環節輸出的調整電流存在波動,形成調整誤差。在重力梯度動態測量中,標度因數不一致誤差引起水平加速度進入重力梯度測量通道,已逐漸成為一項重要誤差來源。
2 加速度計標度因數動態實時調整方法
2.1 Kalman濾波方程
為提高動態下兩路加速度計標度因數不一致信息提取精度,在不一致信息提取中引入Kalman濾波環節,對兩路信息實現最優估計。系統的狀態轉移方程離散形式為:

式中,X=[ ΔK13ΔK24]T,ΔK13和ΔK24為兩路加速度計標度因數不一致數值,βi(i= 1,2,3,4)是事先標定的第i只加速度計標度因數溫度系數,Δti(i= 1,2,3,4)是第i只加速度計的采集溫度變化量,W是2維系統噪聲向量。
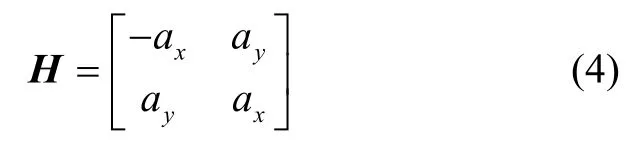
以重力梯度儀一倍頻解調值作為觀測量,系統的量測方程離散形式為:

式中Z=[C1C2]T,C1和C2是經解調提取的重力梯度敏感器輸出信號旋轉頻率正余弦分量,V是2維量測噪聲向量,量測矩陣H為:
在Kalman濾波參數中,系統噪聲方差陣Q的數值可通過重力梯度儀靜態數據計算得到,但量測噪聲方差陣R則與載體動態息息相關,很難通過事先預設的數值滿足同一種載體不同工況下的濾波要求。而R陣的設置誤差會導致Kalman濾波的精度降低,嚴重時還可能會導致濾波發散,在實際工程應用中必須予以考慮。
2.2 Sage-Husa自適應濾波
為解決上述問題,引入Sage-Husa自適應濾波的方法估計R陣的數值[11,12]。定義量測預測誤差為:


由此得到R陣的表達式為:

為提高系統實時運算效率,將式(7)寫成遞推估計的形式,即:

當k→∞時有即長時間濾波后自適應能力將逐漸減弱,直至幾乎失去自適應能力,為始終保持R陣的自適應能力,將等加權平均改為指數漸消記憶加權平均,即:
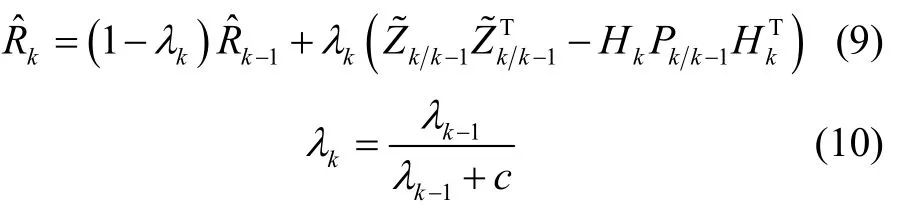
式中初值λ0=1,c是漸消因子,要求0<c<1。當k→∞時有λk→1-c,使濾波器始終保持R陣的自適應能力。此外,為保證R陣的正定性,采用序貫濾波的方法對R陣的對角線元素進行限制,簡記則:

圖3 Sage-Husa自適應濾波算法流程Fig.3 Sage-Husa adaptive filtering algorithm flow
2.3 漸消因子數值確定
在Sage-Husa自適應濾波算法中,漸消因子c的參數選擇尤為重要。漸消因子c的取值越小,對最新量測噪聲變化的自適應能力越強,但若漸消因子c的取值過小,噪聲方差陣的估計結果會變化劇烈,引起Kalman濾波的精度降低。為此,漸消因子c的取值范圍通常在0.9和0.999之間。本文采用半實物仿真的方式選擇漸消因子c的最佳參數。利用靜態下得到兩組加速度計標度因數不一致的變化過程,以及重力梯度儀航空試驗中的實測載體線加速度,結合重力梯度測量誤差方程建立重力梯度敏感器模擬輸出信號asum,仿真計算頻率為1 Hz。使用不同參數的濾波方法得到的兩組加速度計標度因數不一致信號如圖4所示。為評價不同參數的優劣,定義提取誤差ε為:
式中,ε是本次仿真定義的提取誤差,1S和S2是兩路加速度計標度因數差異真值,和是兩路加速度計標度因數差異估計值,n是數據總數。
對同一組仿真數據使用常規解調、Kalman濾波以及不同漸消因子的Sage-Husa自適應濾波的方法提取兩路加速度計標度因數不一致信號,與真值的對比如圖4所示,利用式(12)的計算方法統計不同信號處理方法的提取誤差,相關結果如表1所示。
結合圖4和表1可知,當漸消因子c取0.95時,可實現兩路提取誤差ε最小且小于0.1 ppm,因此在本研究中漸消因子c的值取0.95。
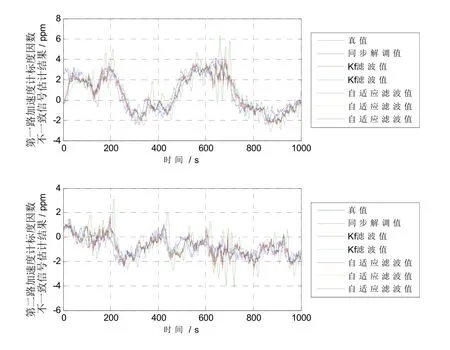
圖4 不同提取方法的加速度計標度因數不一致信號提取結果Fig.4 Results of accelerometer scale factor inconsistent signal extraction with different extraction methods
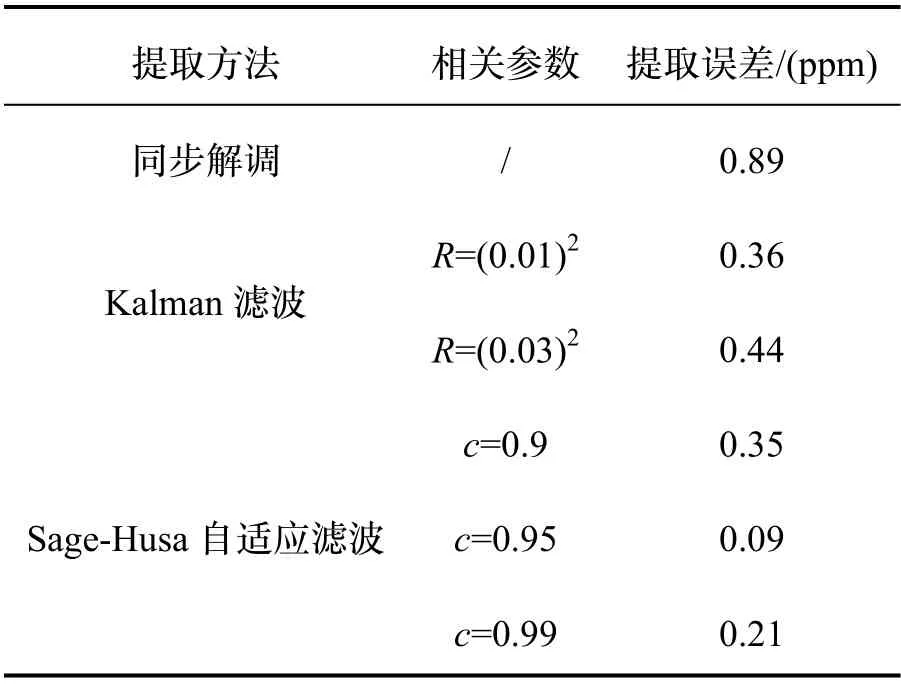
表1 不同提取方法的加速度計標度因數不一致信號提取誤差統計Tab.1 Error statistics of accelerometer scale factor inconsistent signal extraction with different extraction methods
3 試驗驗證
3.1 加速度計內部調整電流
動態條件下敏感器測量信號受到載體運動干擾,無法從其旋轉頻率正余弦分量準確獲得兩路加速度計標度因數不一致性信號,只能通過加速度計標度調整電流波動反推動態條件下加速度計標度因數調整精度。
項目研究團隊分別于2018年和2020年開展兩次基于旋轉加速度計原理的航空重力梯度測量試驗,首次航空試驗中加速度計標度因數控制回路采用常規解調的控制方案,第二次航空試驗采用基于Sage-Husa自適應濾波的控制方案,兩次試驗中加速度計內部調整電流波動情況分別如圖5和圖6所示。

圖5 首次航空試驗加速度計內部調整電流波動Fig.5 Internal adjustment current fluctuation of accelerometer in the first aviation test
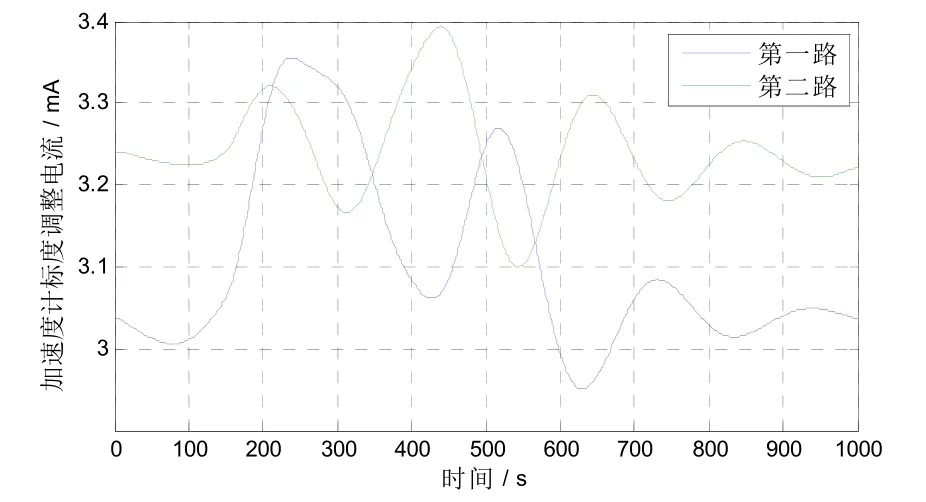
圖6 第二次航空試驗加速度計內部調整電流波動Fig.6 Internal adjustment current fluctuation of accelerometer in the second aviation test
對比圖5和圖6,雖然加速度計標度調整電流無法體現加速度計標度因數不一致性調整回路精度,但對比標度調整電流在測量過程中的波動情況,第二次試驗中電流波動僅為第一次試驗的1/3,表明采用Sage-Husa自適應濾波控制方案能夠抑制航空載體運動對加速度計標度因數調整的影響。
3.2 重力梯度測量結果及精度統計
兩次航空試驗中兩路重力梯度測量信號重復線測量典型結果如圖7和圖8所示,需要說明的是,由于兩次航空試驗測量地點不同,因此兩路重力梯度信號測量結果也不相同。
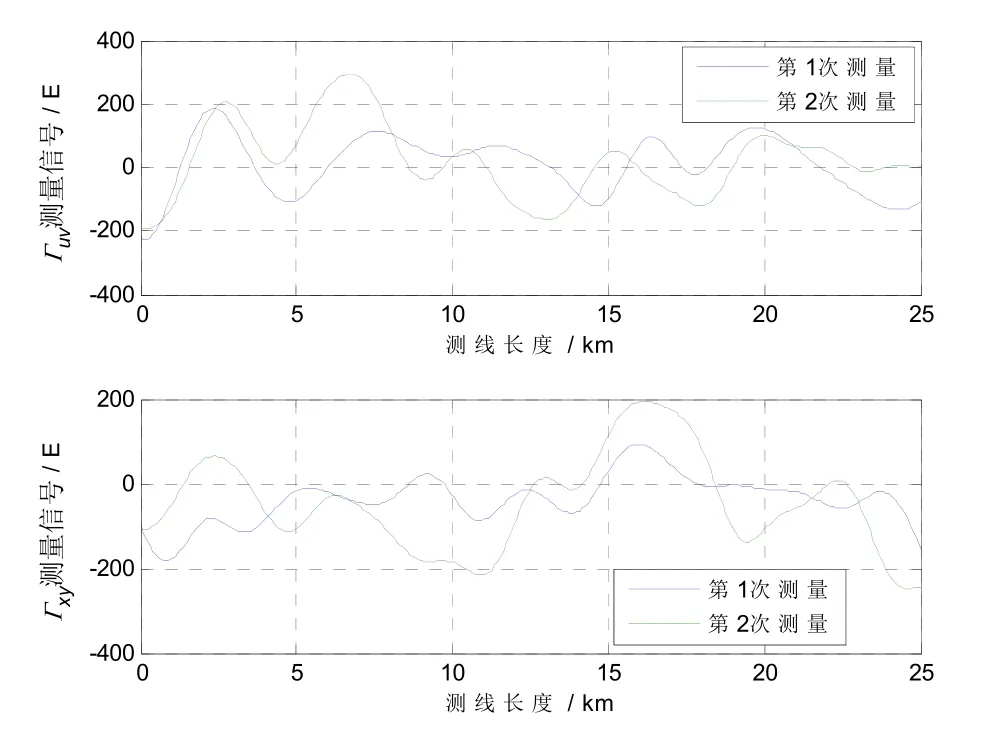
圖7 首次航空試驗兩路重力梯度信號處理結果Fig.7 Processing results of two gravity gradient signals in the first aviation test
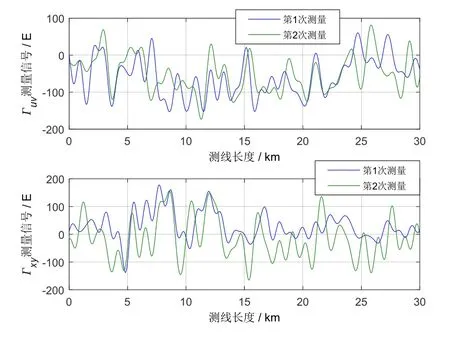
圖8 第2次航空試驗兩路重力梯度信號處理結果Fig.8 Processing results of two gravity gradient signals in the second aviation test
鑒于目前國內沒有高精度航空重力梯度儀進行外符合比對,只能采用內符合的方式進行精度評價,內符合精度計算公式為:
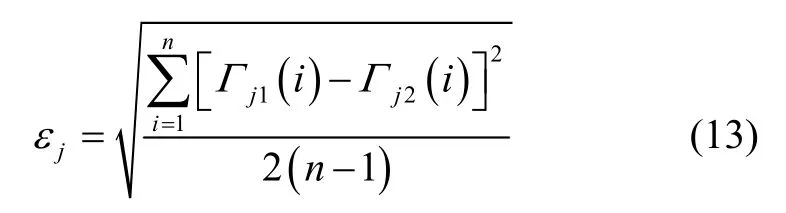
式中,εj是重力梯度j分量的內符合精度,Γj1(i)和Γj2(i)是第1、2航次重力梯度j分量第i點的測量值,n是測量總點數。兩次航空試驗各條測量重復線內符合精度統計結果如表2所示,結果表明調整回路采用Sage-Husa自適應濾波控制方案時能夠大幅度提高航空重力梯度測量精度。可見,內符合精度由150E@1 km提升至65E@1 km。

表2 兩次航空試驗內符合精度統計Tab.2 Accuracy statistics in two aviation tests
4 結 論
本文針對旋轉加速度計式重力梯度儀在動基座測量過程中,加速度計標度因數不一致性調整回路易受到載體水平運動干擾且載體水平運動存在較大波動的問題,提出了一種Sage-Husa自適應濾波的方法,實時適應不同量級的載體運動干擾,對加速度計標度因數不一致信息進行最優估計,并以此實時調整加速度計內部電磁線圈電流來實現加速度計標度因數一致性調整。兩次航空試驗測量結果表明,較常規的解調方法,本文所提方法在相同工況下能夠將加速度計標度調整電流波動降低 2/3,測量內符合精度由150E@1 km提高至65E@1km,證明了所提方法的有效性。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00