基于驅動振型進動的半球諧振陀螺旋轉調制方法
2022-01-15 08:38:20唐明浩張海峰楊松普賈晨凱
中國慣性技術學報 2021年5期
陳 剛,唐明浩,張海峰,楊松普,賈晨凱
(天津航海儀器研究所,天津 300131)
半球諧振陀螺是一種基于哥氏效應敏感外界角速度的振動陀螺儀。相比傳統機械陀螺,它結構簡單,核心工作部件只有石英諧振子和電極基座,并且依靠微幅振動工作,無機械磨損,使其具有造價低、可靠性高、壽命長的特點。與光學陀螺相比,它具有更佳的成本、尺寸、質量和功耗比(C-SWaP)[1]。
半球諧振陀螺有力反饋和全角兩種工作模式。在力反饋模式中,振型被控制在振型角0°位置,力反饋控制力與哥氏力成正比,據此可以計算出陀螺敏感的角速度,此模式陀螺為速率陀螺。由于抑制哥氏力進動的靜電力施力效率不高,可平衡的哥氏力范圍有限,因此陀螺測量動態范圍小。在全角模式中,振型在諧振子周向自由進動,因為振型進動的角速度與外部輸入角速度相差布萊恩系數,可以通過檢測振型的進動角增量計算陀螺敏感的角速度,此模式陀螺為速率積分陀螺。全角模式的高帶寬、大量程,以及穩定的標度因數使其能夠工作在高動態的環境中,但是其允許諧振子自由進動的特性,也帶來了陀螺漂移隨振型位置變化的弊端,因此以主動驅動振型旋轉的方式調制掉漂移從而提高系統等效精度很有必要。
法國賽峰電子與防務公司是目前世界上最成功的半球諧振陀螺制造商之一,它在20世紀90年代開始研制半球諧振陀螺,指出能夠通過驅動振型進動一周來調制漂移,這項技術是賽峰公司全角半球諧振陀螺成功的一項關鍵技術[2-5]。國內外也有一些學者對半球諧振陀螺調制漂移這項技術進行研究,文獻[6]提出了振型自進動技術,通過控制驅動力驅使振型進動,減小阻尼不均漂移在陀螺輸出中的占比;文獻[7]提出了虛擬旋轉技術,分析了施加不同大小虛擬旋轉速度時對陀螺輸出的影響。
上述文獻缺乏對振型驅動機理的分析。本文從半球諧振陀螺理想運動方程出發,推導了陀螺在理想和非理想情況下的橢圓參數控制方程,詳細說明了陀螺驅動振型進動的機理,根據半球諧振陀螺的漂移特性,提出了一種主動驅動振型進動的半球諧振陀螺旋轉調制方法。比較陀螺工作在全角模式和旋轉調制模式下的陀螺漂移Allan方差,并從慣導系統的角度出發,通過半實物仿真對旋轉調制的效果進行驗證。
1 諧振陀螺理想運動方程
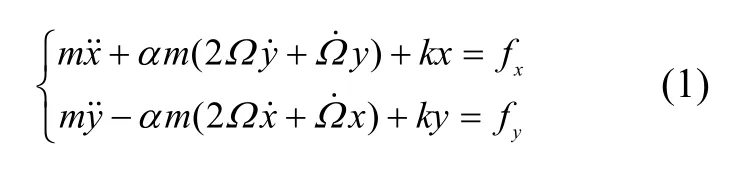
半球諧振陀螺二階振動模態的運動方程是一個二階線性微分方程組[8],如式(1)(2)。方程組的兩個方程分別描述了激勵模態和檢測模態,兩個模態通過外部輸入角速度Ω耦合。由相似系統理論可知,諧振子的運動方程可以等效為二維彈簧-質點模型,如圖1。
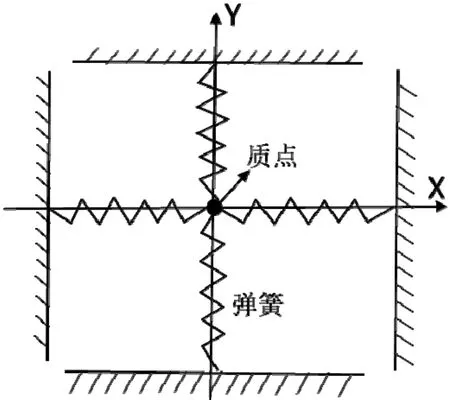
圖1 二維彈簧-質點模型Fig.1 Two-dimensional spring-mass model
將等式兩邊都除模態質量m:
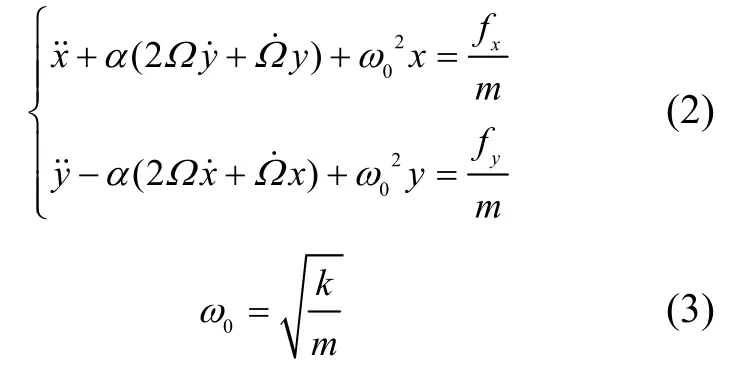
并且方程有解:

其中,0ω為諧振子固有頻率,k為諧振子剛度,α為布萊恩系數,x,y分別為相互正交的檢測軸X,Y處的位移,a為振動波腹點的振幅,q為振動波節點的振幅,θ為振型角,fx,fy為諧振子受到的控制力。
可以將二維彈簧-質點模型表達為向量形式:

方程的解為:

令:
將上述定義帶入方程(5)(6)進行整理:

或:

方程的解為:

由此得到向量形式的陀螺等效二維彈簧-質點運動方程,這為推導陀螺振型進動驅動控制方程提供了基礎。
2 諧振陀螺振型進動驅動控制方程
在等效的二維彈簧-質點模型中,質點的運動軌跡為一個橢圓,a表示橢圓的長軸,對應振動波腹點的振幅;q表示橢圓的短軸,對應振動波節點的振幅;θ為橢圓長軸相對于電極坐標系的夾角,對應振型角;ω為質點運動的頻率,對應振動的頻率。稱這四個變量為橢圓參數;a、q、θ可以通過全角模式下檢測并計算得出,ω等于激勵力的頻率。
假設激勵力的頻率不等于固有頻率:

則式(9)變為:

為了得到用橢圓參數為變量的方程,需要消去r。忽略a˙˙和q˙˙,用正交的振動相位和空間位置劃分各項:

其中φ= (ω0+δω)t。
將式(11)-(14)帶入式(8),并忽略小量可得:
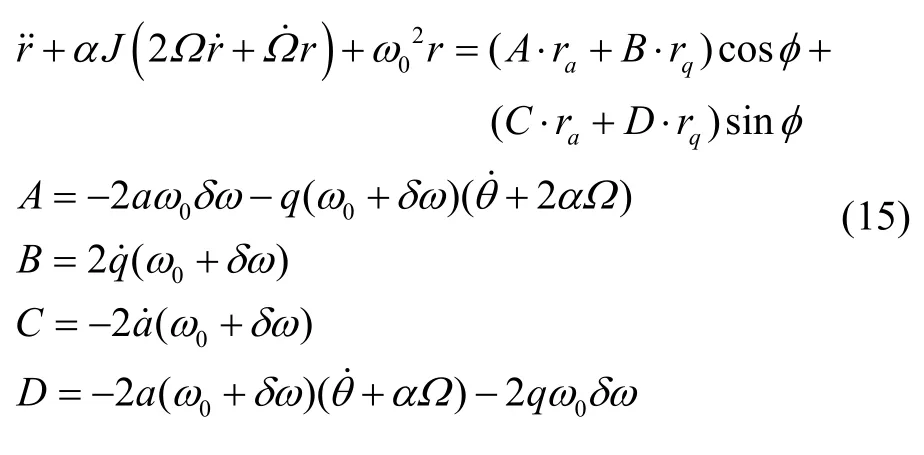
由式(15)可得橢圓參數相關量對應著振動不同的位置和相位,當施加對應的控制力,就可以分別對橢圓參數進行控制。將控制力構造為:

一般使用穩幅回路控制波幅點的振幅,將a控制為常值;由于q會引起橢圓參數控制力的交叉耦合,所以一般使用正交回路抑制波節點振幅,將其控制為0;頻率追蹤回路使諧振子始終振動在固有頻率。在這些條件的基礎上,令:
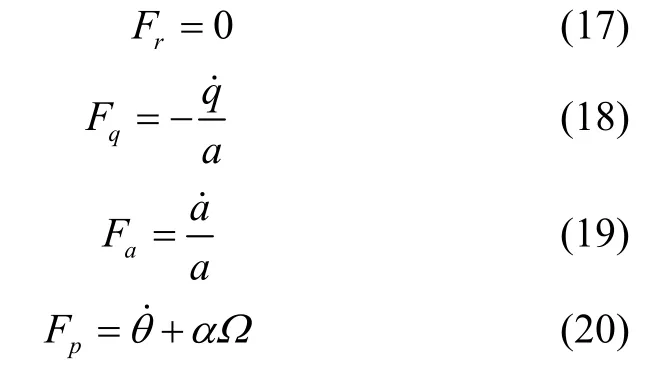
式(17)-(20)展現了陀螺中控制力對于橢圓參數的控制關系。稱aF為振幅控制力,Fq為正交控制力,Fp為進動控制力;將式(20)稱為諧振陀螺振型進動驅動控制方程,通過施加進動控制力,可以主動地驅動振型旋轉,這是半球諧振陀螺旋轉調制的基礎。
3 控制方程誤差分析
在實際的諧振陀螺中,諧振子存在周向阻尼不均和因周向質量不均引起的頻率裂解。諧振子分布在一周的阻尼不均勻,等效的作用效果是諧振子存在一個最大阻尼軸和與其正交的最小阻尼軸。在諧振子周向質量不均分布函數中,對陀螺性能影響最大的是其中四次諧波引起的頻率裂解[9],諧振子在自由振動狀態下會出現兩個相互正交的頻率軸,諧振子振動波腹處在這兩個軸時分別達到最大固有頻率和最小固有頻率。頻率裂解會使波節點振幅快速增長。為了減小陀螺在力反饋模式下的漂移,一般會通過修調的方式將剛度軸對準電極軸,而阻尼軸和電極軸的夾角則不可控。
根據Lynch推導的諧振子不理想條件下存在質量不均、阻尼不均等的諧振陀螺運動方程[8],將其寫成向量形式并忽略了輸入角速度的平方項,因為此項對頻率的影響忽略不計:
其中:
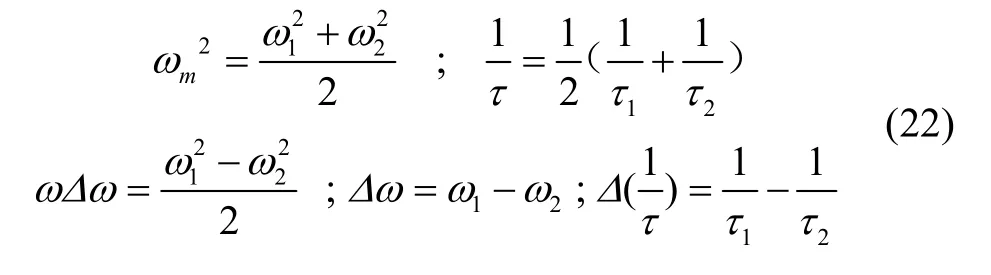
ω1、ω2、τ1、τ2分別對應著振型在0 °時兩個模態的固有頻率和衰減時間。θτ、θω分別表示最大阻尼軸和最大剛度軸相對于電極坐標系X軸的偏角。可以將式(21)寫為:

同樣地,將式(12)-(14)帶入式(23),將各項以正交的空間位置和正交的相位劃分,并合并同類項。設ra為波幅點方向的單位向量,rq為波節點方向的單位向量。假設開啟了正交回路、穩幅回路、頻率追蹤回路三條回路的控制。可以用向量求模的方式提取出空間方向上的量。用左乘式(23)可得:

用rqT左乘式(23)可得:
式(24)-(27)說明了諧振子在非理想情況下各個控制力和橢圓參數以及相關誤差的關系。振動波幅點的振幅會因為阻尼而衰減,控制力Fa的作用是補充因阻尼損失的能量;控制力Fq抑制諧振子的頻率裂解而導致波節點的振幅隨時間增長。從非理想情況下諧振陀螺振型進動驅動控制方程(27)中可得,諧振子的阻尼周向不均會導致陀螺存在和振型角相關的周期性漂移誤差。
4 諧振陀螺漂移旋轉調制方法
不同于光學陀螺慣導的旋轉調制技術,半球諧振陀螺慣導無需旋轉框架,系統中的每一只陀螺在正常全角模式敏感外部角速度的同時,都處于主動驅動振型繞陀螺自身敏感軸進動旋轉狀態,從而實現漂移的調制,這也使得半球諧振慣導能以純捷聯的方式得到旋轉調制的效果。
諧振子的周向阻尼不均會引起陀螺漂移誤差ε,且該漂移誤差和振型角相關:
當陀螺工作在全角模式時,振型會自由進動到任意角度,這會導致陀螺漂移持續發生變化,降低陀螺輸出的穩定性。陀螺振型因漂移產生進動,這種情況下的陀螺漂移會表現以趨勢項為主的斜漂,使慣導解算產生更大的誤差。阻尼不均漂移誤差具有在振型角度[θ0,θ0+π]整周期均值為0的特性:

根據此特性,可以施加控制力Fp驅動振型進動一周,從而達到消除漂移誤差的效果。對于慣導解算定位誤差來說,陀螺漂移的影響會隨時間積累,所以其關注在時間軸上對陀螺漂移的積分結果。對于不確定的阻尼軸θτ,當振型角θ和時間成線性關系,即振型勻速進動時,在時間軸上對陀螺漂移的整周期積分有最好的效果,假設θ=vt,v為振型進動的速度:

圖2展示了半球諧振陀螺旋轉調制模式的實現方法。檢測電極a、q檢測到的振動信號,分別由參考信號 cosω0t和 sinω0t解調并低通濾波,得到Cx、Sx、Cy、Sy四個直流信號量,參考信號的頻率由頻率追蹤回路提供;四個直流信號量經過全角信號解算后得到四個橢圓參數:a、q、φ、θ。a表示波幅點振幅對應的電壓信號,q表示波節點振幅對應的電壓信號,φ表示參考信號和振動信號的相位差,θ表示振型角。a、q、φ分別為穩幅回路、正交回路和頻率追蹤回路的控制量。振型角θ信號量輸入到旋轉調制控制回路后,經PID控制,輸出進動控制力Fp對應的控制電壓,分配到A、Q激勵電極上,使得控制力作用在振型波節點上,驅動振型進動。陀螺漂移隨振型進動的變化如圖3所示。
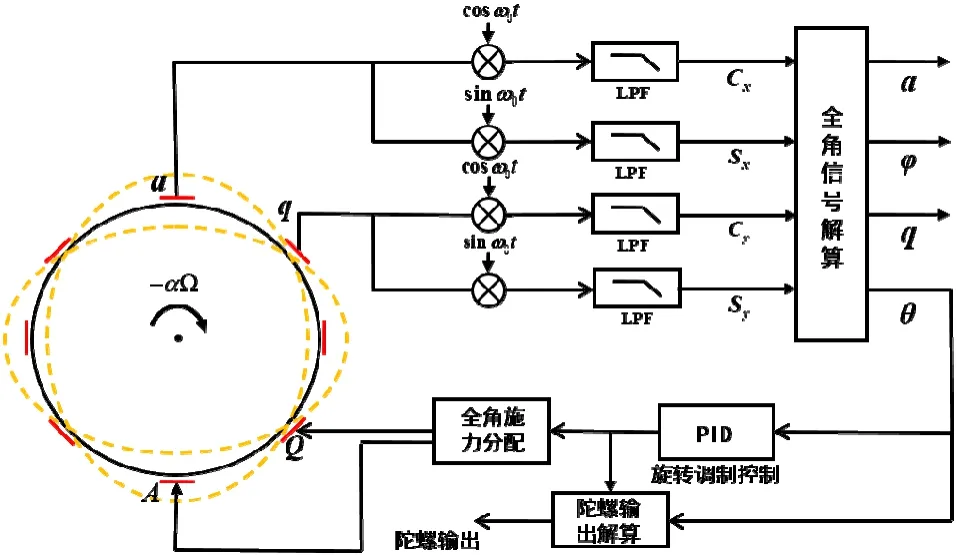
圖2 半球諧振陀螺旋轉調制模式原理框圖Fig.2 The principle block diagram of HRG rotation modulation mode
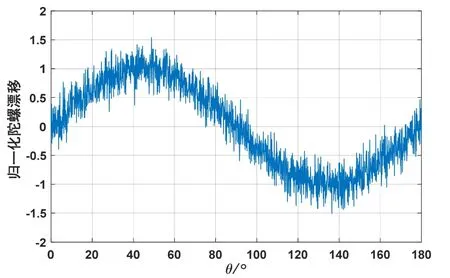
圖3 半球諧振陀螺漂移隨振型進動變化Fig.3 The drift of HRG changes with the procession of the vibration mode
5 實驗與半實物仿真定位試驗
將半球諧振陀螺靜置在測試平板上。在室溫變化條件下,待陀螺穩定后分別錄取常規全角模式和旋轉調制模式下的陀螺長時間輸出數據。圖4展示了兩種工作模式下陀螺輸出的Allan方差,其中虛線代表常規全角模式,實線代表旋轉調制模式,tΔ表示數據處理間隔時間。旋轉調制模式下陀螺輸出的零偏不穩定性較常規全角模式降低了一個數量級以上,更長的探底時間說明旋轉調制模式在長時間會有更佳的性能。從圖4中也能明顯看出旋轉調制模式對角隨機游走和速率斜坡也有明顯的抑制。
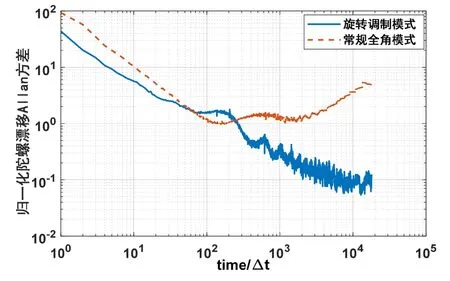
圖4 常規全角模式和旋轉調制模式陀螺漂移Allan方差對比Fig.4 Comparison of Allan variance of gyro bias between conventional whole angle mode and rotation modulation mode
同樣在室溫變化條件下,將半球諧振陀螺設置為常規全角模式和旋轉調制模式,錄取半球諧振陀螺慣導系統原始脈沖數據,進行半實物慣導解算仿真,選取的全角模式和旋轉調制模式的數據在同一諧振頻率變化趨勢和范圍,保證受溫度的影響相同。結果如圖5所示。以系統工作在全角模式下最大的定位誤差為基準,旋轉調制模式下的定位誤差減小了50%。
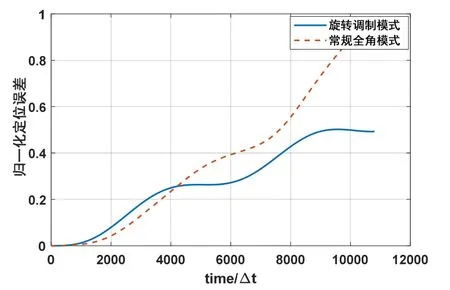
圖5 常規全角模式和旋轉調制模式慣導半實物仿真定位誤差對比Fig.5 Comparison of semi-physical inertial navigation simulation positioning error between conventional whole angle mode and rotation modulation mode
6 結 論
本文從半球諧振陀螺等效的二維彈簧質點運動模型出發,分別推導了半球諧振陀螺在理想情況下和非理想情況下工作在全角模式的橢圓參數控制方程,從機理上闡述了半球諧振陀螺驅動振型進動的方法,說明了通過振型進動旋轉調制陀螺漂移的可行性。在實驗中,比較了全角模式和旋轉調制模式下的陀螺漂移Allan方差以及慣導的半實物仿真結果,旋轉調制模式下的陀螺零偏穩定性(Allan方差)相比常規全角模式下提高了一個數量級以上,慣導系統的定位精度(最大值)提高50%。本文在分析半球諧振陀螺的漂移特性時,只考慮了陀螺諧振子本體的誤差,較為理想。在實際的情況中還可能存在陀螺檢測電極與激勵電極增益不一致等誤差,也會對陀螺漂移產生影響[10],更全面的陀螺漂移特性分析下的旋轉調制方法有待后續研究。