抑制閉環光纖陀螺高動態角運動測量誤差的校正回路設計
2022-01-15 08:17:30張桂才宋凝芳
中國慣性技術學報 2021年5期
關鍵詞:振動
張桂才,馮 菁,宋凝芳,林 毅,羅 巍,楊 曄,2
(1. 天津航海儀器研究所,天津 300131;2. 中國船舶航海保障技術實驗室,天津 300131;3. 北京航空航天大學,北京 100191)
光纖陀螺在慣性導航、控制和測量領域已經得到廣泛應用[1-5]。盡管如此,由于目前閉環光纖陀螺控制回路存在固有延遲和非線性解調環節,會產生一定程度的振動零偏效應。這是由于陀螺閉環反饋回路的瞬態殘余誤差信號較大導致解調非線性引起的振動誤差。本文作者曾就回路固有延遲引起的信號超調,提出通過約束回路增益來降低振動零偏效應,并在工程實踐中得到應用[6],但這種方法也在一定程度上限制了光纖陀螺帶寬。在某些大動態應用中將產生較大的角速率跟蹤誤差,影響系統精度。
本文針對車載沖擊顛振環境中應用的捷聯式慣性測量單元(IMU)的光纖陀螺反饋控制回路傳遞函數進行建模分析,提出一種采用回路校正技術進一步抑制殘余誤差信號的方法。研究表明,該技術可以在抑制振動零偏效應的同時將陀螺角速率跟蹤誤差以及最大瞬態角誤差降低一個數量級以上,為提高光纖陀螺的惡劣動力學環境適應性提供技術途徑。
1 閉環光纖陀螺傳遞函數的建模和分析
1.1 閉環光纖陀螺的物理模型和傳遞函數
閉環光纖陀螺的控制回路在載體加速和減速過程中的跟蹤誤差無法從陀螺的輸出中直接觀察到和分離出來,因而很難對其進行標定和補償。通過對光纖陀螺傳遞函數進行建模,可以從理論上分析這類誤差的產生機制,并進而對系統性能進行評估和預測。
通常將光纖陀螺閉環回路劃分成幾個獨立的環節,分別給出每個環節的傳遞函數,再根據這些環節在陀螺中的控制銜接關系,推導出光纖陀螺閉環傳遞函數。光纖陀螺通過測量兩束反向傳播光波之間的非互易相位差來敏感載體的旋轉角速率,控制回路主要由Sagnac干涉儀、光探測器、前置放大器、A/D轉換器、多點采樣與解調器、一次積分、數字截取、二次積分、D/A轉換、驅動放大器、相位調制器、線圈延遲等環節組成[7],其中模擬電子元件產生的延遲很小,可以忽略,因此系統中最主要的延遲是數字寄存器和數字處理器處理時序產生的延遲,這些延遲一般為光纖環傳輸時間τ的2至4倍。忽略采樣和解調等非線性環節,未經校正的光纖陀螺閉環控制回路的典型傳遞模型如圖1所示[7,8]。歸一化后的傳遞函數可以表示為:
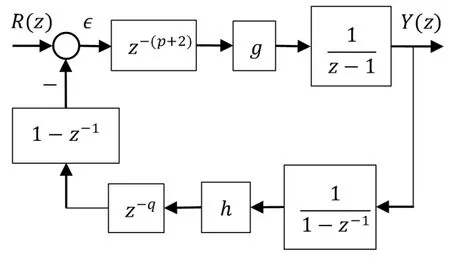
圖1 閉環光纖陀螺的結構圖Fig.1 Structure diagram of closed loop FOG

式中g、h分別為光纖陀螺控制回路的前、后向通道增益,p、q分別表示前、后向通道的固有延遲。
1.2 約束回路增益抑制振動零偏效應
振動零偏效應是反映光纖陀螺動態適應性的一項重要指標,它表現為振動過程中陀螺零偏(均值)發生偏移。振動零偏效應與光纖陀螺的調制/解調原理及其參數設計有關。通常光纖陀螺通過Sagnac效應敏感角速率,然后產生一個施加到相位調制器上的反饋信號,使偏置工作點保持恒定。但是由于回路延遲,反饋信號總是會滯后于Sagnac相位,形成殘余誤差信號。該誤差在回路剛度不足時的高動態輸入下會變得很大。通常,當光纖陀螺工作在過調制狀態及瞬時殘余誤差信號很大時,如圖2所示,由于光/電余弦響應的非線性,正負解調周期的采樣值將不對稱,使得解調環節的增益變為與輸入同頻的時變參量,這稱為廣義的探測器飽和,將導致振動零偏效應[6]。
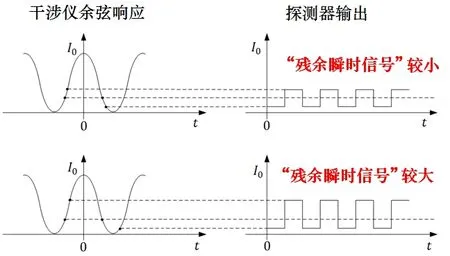
圖2 余弦響應非線性引起的廣義探測器飽和Fig.2 Generalized detector saturation caused by cosine response nonlinearity
研究表明,對于圖1所示含有固有延遲的閉環光纖陀螺,當回路開環增益過大時,回路輸出會出現超調,將進一步放大上述振動零偏效應。考慮圖2存在的非線性解調環節,可以通過降低回路增益來抑制振動零偏效應,并改善穩定裕度。圖3給出了光纖長度為1500m的某型陀螺在回路固有延遲為4τ時,振動零偏效應與回路增益的函數關系,可以看出,要將振動零偏誤差控制在0.01°/h以下,需要將回路增益限制在gh=0.03以內,相應的帶寬約為:
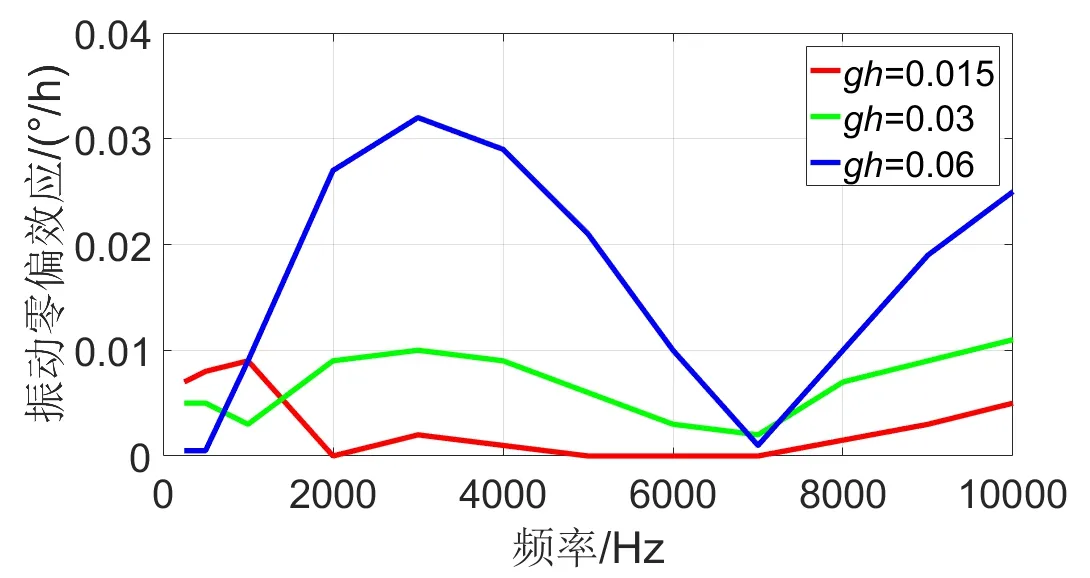
圖3 振動零偏效應與回路增益的關系Fig.3 Relationship between vibration bias effect and loop gain
式中fp為光纖環圈的本征頻率,。此時光纖陀螺的帶寬約800Hz,這種方法本質上是通過犧牲陀螺的動態響應范圍來換取振動零偏誤差的降低。
1.3動態輸入下的角速率跟蹤誤差和瞬態角誤差

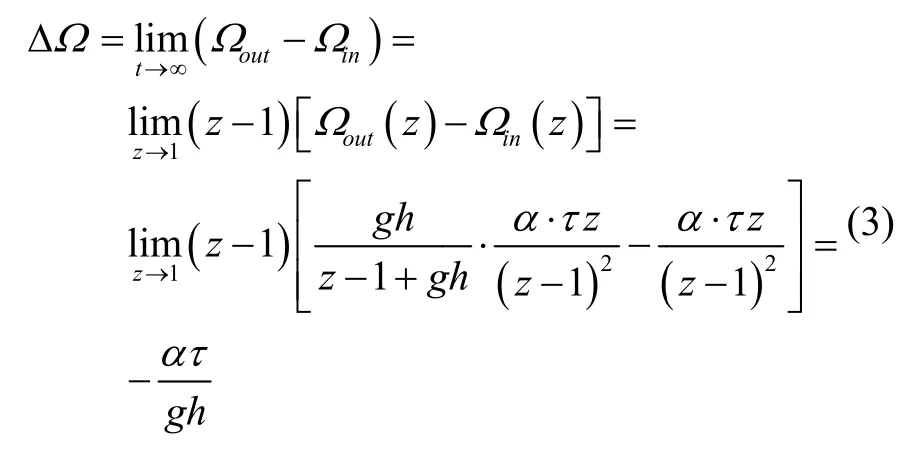
參照文獻[9],我們把陀螺儀的角運動測量誤差定義為在某一時刻對輸入角速率變化的跟蹤誤差的積分,也即瞬態角誤差。對于本文關注的車載沖擊振動條件,要求光纖陀螺在特定角速率分布下的最大瞬態角誤差為幾個微弧度。在圖1所示的實際閉環光纖陀螺的傳遞模型中,回路延遲4τ,將回路增益約束至gh=0.03水平,我們仿真發現,其頻率特性與不含延遲的具有同樣增益的一階慣性環節近似。因而,對于以角加速度α運動的載體,很容易得到校正前陀螺的穩態角速率跟蹤誤差為:
圖4是某型閉環光纖陀螺輸入角速率斜坡信號時的系統響應,其中局部放大的區域為加速開始前后共2ms階段的輸入和輸出響應,可以看出,此時輸出相較于輸入有一個較大的角速率跟蹤誤差。其中,光纖長度為1500 m時,光纖環傳輸時間為τ=7.5×10-6s。設輸入角速率在加速和減速時的角加速度分別為±100°/s2,角速率跟蹤誤差和瞬態角誤差如圖5所示,可以看出,加速或減速過程的角速率跟蹤誤差達到ΔΩ≈423μrad/s ≈ 87°/ h ,雖然在7s的整個工作過程中的累積角誤差基本為零,但2s時的瞬態角誤差已達到430μrad。這說明,因抑制振動零偏效應而約束回路增益引起的光纖陀螺帶寬下降,導致較大的角速率跟蹤誤差和瞬態角誤差。在仿真中,盡管載體通過加速或減速改變運動狀態后又回到原狀態,整個動態過程上角速率跟蹤誤差引起的累積角誤差在一階上很小或為零,但某個時刻的瞬態角誤差可能較大,不能滿足高機動性IMU的角運動測量精度要求。
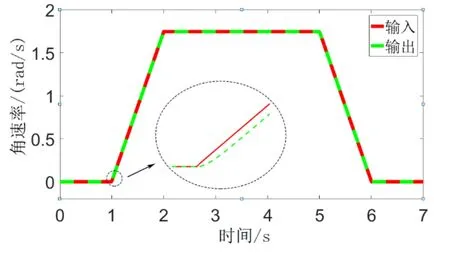
圖4 標準控制回路的斜坡信號響應Fig.4Slopesignal response of standard control loop
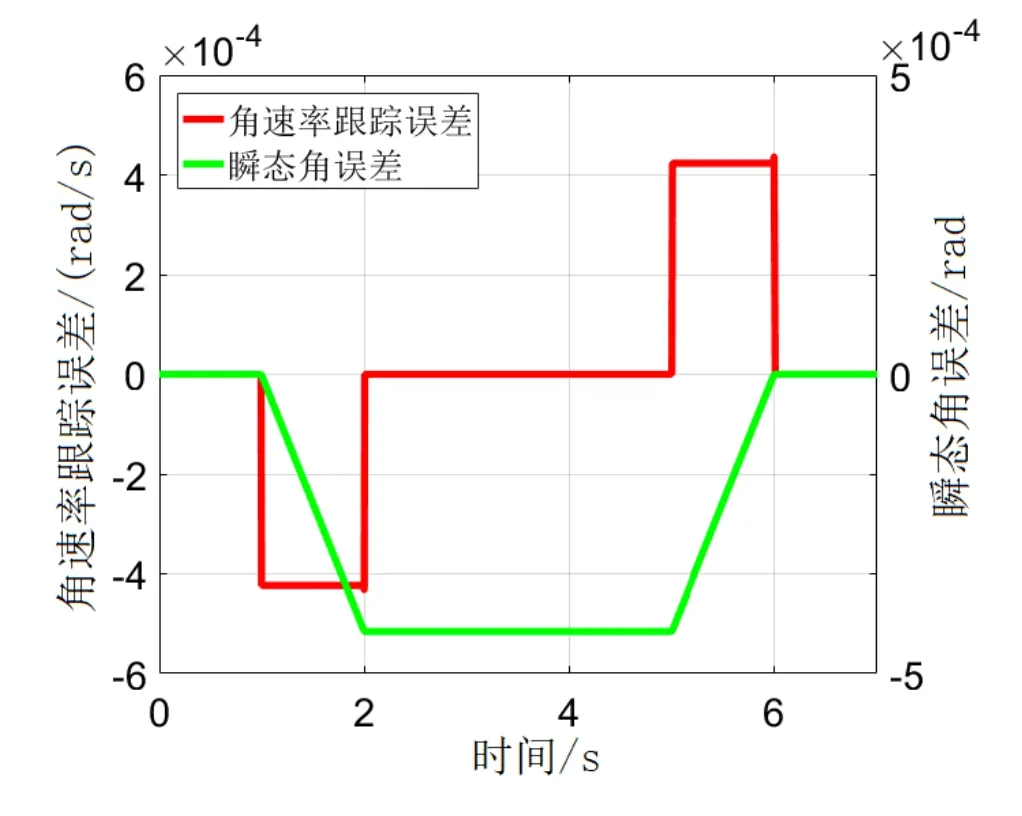
圖5 標準控制回路的角速率跟蹤誤差及瞬態角誤差Fig.5Angular rate tracking error and transient angular error of standard control loop
2閉環光纖陀螺的回路校正設計
2.1高機動應用下回路校正的必要性
據上所述,對于大動態應用條件,有必要改進光纖陀螺的閉環控制回路。本文嘗試采用回路校正技術來使振動零偏效應和角速率跟蹤誤差同時滿足系統的動態性能要求。目前在這方面的文獻報道和可資借鑒的成熟方案很少。文獻[10]針對閉環光纖陀螺的振動零偏效應,基于數字控制系統的有限拍無差設計,提出了一種回路校正方案,對殘余誤差信號進行高階補償,理論上可將殘余誤差信號抑制兩個數量級以上。但該文獻沒有考慮回路延遲對閉環光纖陀螺系統穩定性的影響,因而雖然對殘余誤差信號的補償效果理想化,但設定的增益參數不合理,計算后發現系統的穩定裕度不夠。文獻[9]針對減小動態輸入下的角速率跟蹤誤差及瞬態角誤差,仍然基于最少拍控制原理,在陀螺的標準閉環控制回路中增加了一個與串聯回路并聯的一個附加積分路徑,通過蒙特卡洛仿真證明導航精度有了實質的改進。該文獻雖然意識到回路延遲的影響適當調整了增益參數,但其最少拍設計基于精準的回路總延遲,這在實際設計中難以實現。
因此,本文基于自控理論的比例-積分控制規律提出了一種改進的閉環光纖陀螺的回路校正方案,即在回路中增加PI控制器。
校正前的系統包含有兩個積分環節,但由于后向通道中包含有一個線圈延遲環節,可與其中一個積分環節相抵消,故系統近似為Ⅰ型系統。其靜態速度誤差系數為有限值,故輸入為斜坡信號時,速度誤差不為零。而PI控制器相當于在系統中增加了一個位于原點的開環極點和一個負實開環零點。該極點可以提高系統的型別,使速度誤差為零,而增加的負實零點可以緩和PI控制器的開環極點對系統穩定性及動態過程產生的不利影響。與文獻[9][10]相比,本文給出的回路校正方案中不僅減小了系統的殘余誤差信號(抑制振動零偏效應),提高了光纖陀螺的閉環帶寬,而且確保了陀螺的穩定性能,降低了動態輸入下的角速率跟蹤誤差。
2.2 閉環反饋控制回路的校正設計和傳遞函數
本文在串聯回路中并聯了一個起校正作用的積分路徑。帶校正回路的閉環光纖陀螺結構如圖6所示,其中k為校正系數,mτ為積分環節中的時間延遲。研究表明,增大k可以提升系統的響應速度,但k過大會使系統傳遞函數的幅頻特性存在明顯諧振峰,進而導致振動零偏效應,因此k不宜大于0.003。增大系統回路增益gh可以提升系統的動態性能,增大系統帶寬,但gh過大會使系統穩定裕度變差,因此gh不宜大于0.09。此外,改變m同樣會影響系統傳遞函數的幅頻特性,綜上考慮,選取gh= 0.09,k= 0.002,m=1。增加校正后的系統傳遞函數可以表示為:
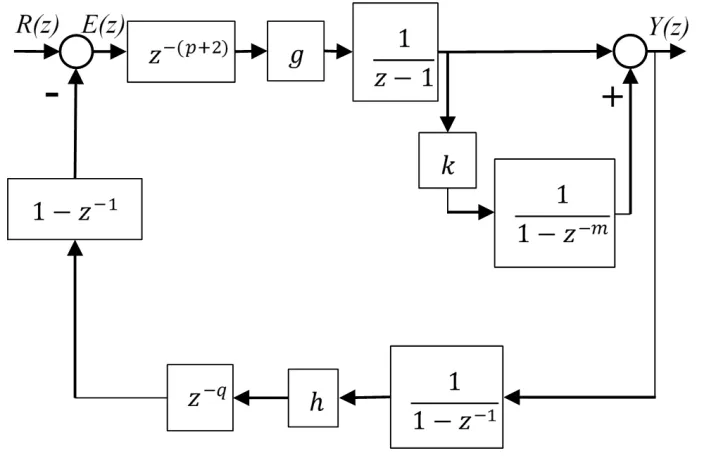
圖6 帶校正的閉環光纖陀螺結構圖Fig.6 Structure diagram of closed loop FOG with correction

3 增加回路校正的仿真結果
3.1 增加回路校正的頻率特性和穩定裕度分析
在gh= 0.09,k= 0.002,m=1的情況下,增加校正回路前后陀螺的幅頻特性曲線如圖7所示。從圖中可以看出,增加校正回路后,陀螺閉環帶寬由約800 Hz增加為3600 Hz左右,且幅頻特性曲線無明顯諧振峰。
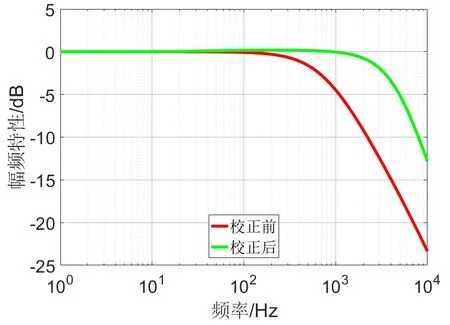
圖7 校正前、后傳遞函數幅頻特性曲線Fig.7 Amplitude frequency characteristic curve of transfer function before and after correction
利用Simulink仿真對增加校正后的閉環光纖陀螺的穩定性進行分析,求得增加校正回路后的幅值裕度和相角裕度分別如表1所示。校正后系統的裕度滿足自控理論中對系統穩定性的要求,即幅值裕度應大于6dB,相角裕度應大于30 °。
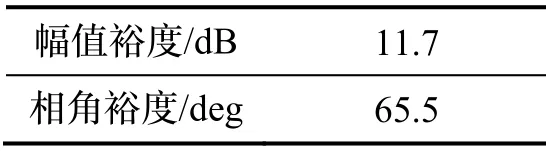
表1 幅值裕度和相角裕度Tab.1 Amplitude margin and phase margin
3.2 動態輸入條件下的角速率跟蹤誤差仿真
對于某型光纖陀螺,增加校正回路后系統對特定輸入的響應如圖8所示,圖8中子圖為加速開始前后共4 ms內輸出響應的局部放大,從此子圖中可以看出,雖然系統的響應時間變長,但角速率跟蹤誤差明顯減小。角速率跟蹤誤差及瞬態角誤差如圖9所示。圖8中,加速或減速過程的角速率跟蹤誤差 ΔΩ≈ 13μrad/s ,比校正前減小了一個數量級以上。對應的最大瞬態角誤差為6.99 μrad,同樣比校正前減小了一個數量級以上,滿足車載沖擊振動條件下最大瞬態角誤差為幾個微弧度的角運動測量誤差需求。
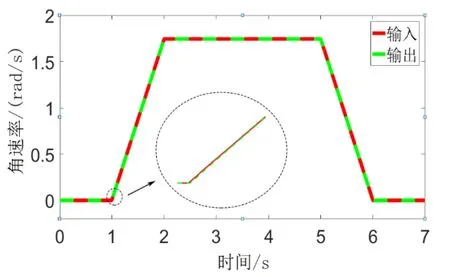
圖8 增加校正后回路的斜坡信號響應Fig.8 Slope signal response of corrected loop
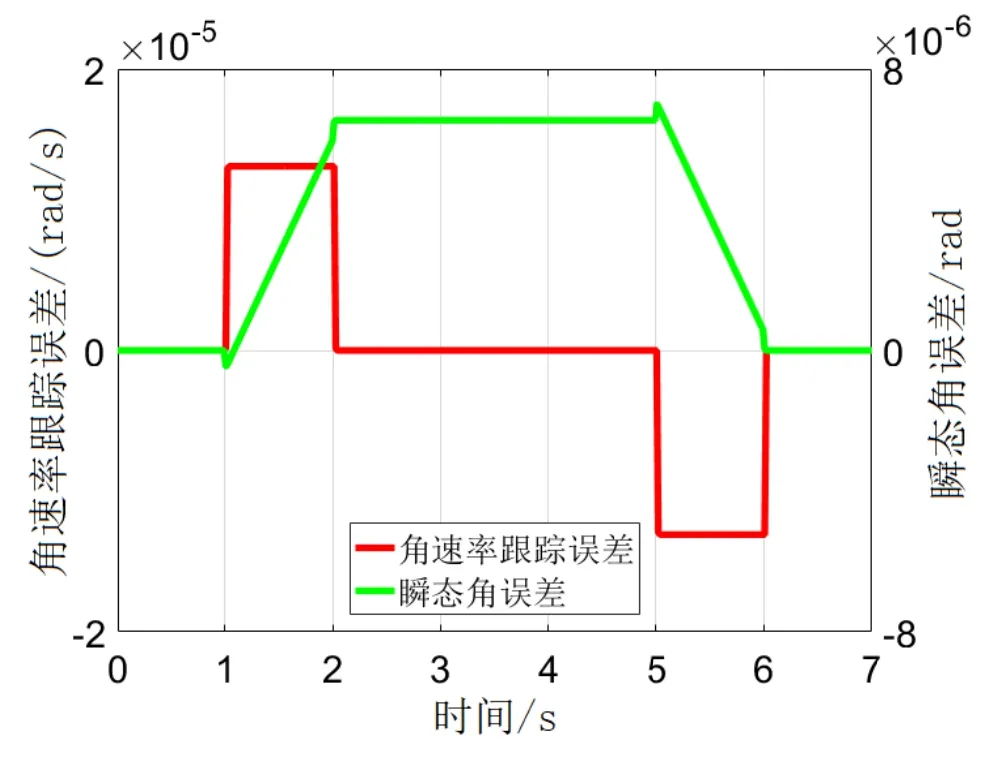
圖9 增加校正后系統的角速率跟蹤誤差及瞬態角誤差Fig.9 Angular rate tracking error and transient angular error of the corrected system
4結論
對于車載沖擊振動條件下的某些應用,要求光纖陀螺在特定角速率分布下的最大瞬態角誤差為幾個微弧度。實際中,由于陀螺標準閉環控制回路存在固有延遲,為避免超調和振動零偏效應,必須約束回路增益。針對特定輸入信號,實際計算證明,標準控制回路的最大瞬態角誤差并不能滿足系統級幾個微弧度的角運動測量誤差的要求。本文提出了一種回路校正技術作為基本的解決方案。
針對光纖長度為1500 m的某型光纖陀螺,對增加校正后的光纖陀螺閉環控制回路進行了仿真分析,結果表明,增加回路校正設計后可以將光纖陀螺的帶寬提高為原來的四倍,且沒有過分削減陀螺的穩定裕度。對于特定輸入信號而言,角速率跟蹤誤差和最大瞬態角誤差均比校正前減小了一個數量級以上,角運動測量誤差大大降低,滿足車載沖擊振動條件下的角運動測量精度要求。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00