基于WNN的全彈性空間機(jī)器人自適應(yīng)非奇異快速終端滑模控制算法
2022-01-15 08:17:46付曉東
中國慣性技術(shù)學(xué)報(bào) 2021年5期
關(guān)鍵詞:振動設(shè)計(jì)
付曉東,陳 力
(福州大學(xué) 機(jī)械工程及自動化學(xué)院,福州 350108)
空間機(jī)器人在維修或捕獲故障衛(wèi)星,為航天器補(bǔ)給物資等方面發(fā)揮著不可替代的作用,大型空間部件(如太陽能電池,無線電天線)的安裝,空間站建造等都離不開空間機(jī)器人,因此,其動力學(xué)模擬及運(yùn)動控制技術(shù)受科研工作者廣泛關(guān)注[1-7]。空間機(jī)器人在地面環(huán)境中加工、組裝、調(diào)試,機(jī)械加工裝配誤差只能減弱,難以消除,而且一旦進(jìn)入極端惡劣的太空環(huán)境,易受宇宙射線等的沖擊,這些建模誤差及外部干擾易導(dǎo)致控制性能減弱,甚至失控的發(fā)生。滑模控制是處理具有參數(shù)攝動、外部擾動等非線性因素的有效方法,具有強(qiáng)魯棒、易工程化等優(yōu)點(diǎn)[8],但存在有限時(shí)間收斂、抖振現(xiàn)象和奇異性等問題。為解決這些問題,研究人員提出了終端滑模控制[9]、快速終端滑模控制[10]、非奇異終端滑模控制[11],解決了傳統(tǒng)滑模控制的部分缺點(diǎn)。文獻(xiàn)[12]設(shè)計(jì)了魯棒非奇異快速終端滑模控制器,收斂速度快,且避免了奇異性,但在總控制器中引入H∞項(xiàng)補(bǔ)償系統(tǒng)不確定性和外部干擾,H∞項(xiàng)的引入導(dǎo)致控制器運(yùn)算量大,不易于航天實(shí)現(xiàn)。文獻(xiàn)[13]提出了自校正模糊PID非奇異快速終端滑模控制,有快速響應(yīng)、穩(wěn)態(tài)誤差小等優(yōu)點(diǎn),但是采用計(jì)算量大的TDE算法來估計(jì)未知動力學(xué)模型,而且所采用的PID控制增益影響系統(tǒng)穩(wěn)定性。針對上述問題,本文設(shè)計(jì)了基于小波神經(jīng)網(wǎng)絡(luò)(Wavelet neural network, WNN)的自適應(yīng)非奇異快速終端滑模控制算法,利用WNN網(wǎng)絡(luò)估計(jì)系統(tǒng)中的不確定項(xiàng)上界,構(gòu)造的非奇異滑模面保證滑模控制的非奇異性,采用自適應(yīng)算法自動調(diào)整控制器參數(shù),并且設(shè)計(jì)補(bǔ)償項(xiàng),減少抖振,確保高精度跟蹤。
值得指出的是,空間機(jī)器人發(fā)射、運(yùn)行、維護(hù)成本很高,空間探測任務(wù)復(fù)雜、條件嚴(yán)苛,于是通常按照輕質(zhì)、承載力大、工作范圍廣的要求設(shè)計(jì)。空間機(jī)器人主要由基座、臂構(gòu)成,基座上固定有平行導(dǎo)軌,臂在導(dǎo)軌上移動工作。臂由若干桿鉸接而成,通常具有細(xì)長、結(jié)構(gòu)剛度偏低的特性,由安裝于鉸接處的諧波驅(qū)動柔輪驅(qū)動,而這種驅(qū)動器使電機(jī)轉(zhuǎn)子轉(zhuǎn)角與關(guān)節(jié)轉(zhuǎn)角不同步,相當(dāng)于在兩者之間設(shè)置了力矩濾波器,引入了關(guān)節(jié)柔性。當(dāng)空間機(jī)器人受到外部太空激勵或執(zhí)行抓捕及后續(xù)一體化操作任務(wù)時(shí),極易誘發(fā)導(dǎo)軌、關(guān)節(jié)、桿的彈性振動,從而影響運(yùn)動穩(wěn)定性。因此,為實(shí)現(xiàn)空間機(jī)器人的高精度、高穩(wěn)定性控制,建模時(shí)考慮基座、關(guān)節(jié)、臂的彈性特征很有必要,但是全彈性空間機(jī)器人運(yùn)動、振動控制勢必會增大建模、分解及控制器設(shè)計(jì)的難度。目前,針對彈性系統(tǒng)的研究已經(jīng)深入[14],文獻(xiàn)[15]提出了柔性關(guān)節(jié)空間機(jī)器人動力學(xué)模型,并設(shè)計(jì)了基于觀測器的魯棒控制,但是并未考慮基座、臂桿柔性振動對系統(tǒng)的影響。文獻(xiàn)[16]提出了彈性基座、柔性關(guān)節(jié)空間機(jī)器人動力學(xué)模型,并設(shè)計(jì)了高精度運(yùn)動控制算法,但是在建模分析及算法設(shè)計(jì)時(shí)均忽略了臂桿柔性。文獻(xiàn)[17]提出了柔性關(guān)節(jié)、柔性臂空間機(jī)器人動力學(xué)模型,但是將模型分解為慢變子系統(tǒng)與雙快變子系統(tǒng),因此,導(dǎo)致運(yùn)動及振動控制器設(shè)計(jì)繁雜。文獻(xiàn)[18]提出了彈性基座、柔性臂空間機(jī)器人運(yùn)動控制及抑振方案,但是在模型設(shè)計(jì)時(shí),未考慮關(guān)節(jié)柔性振動的影響,而且設(shè)計(jì)了基于混合軌跡的終端滑模算法,無法保證系統(tǒng)快速收斂。上述研究主要考慮基座、關(guān)節(jié)、臂部分構(gòu)件彈性的影響,而全彈性空間機(jī)器人的研究比較少見。
鑒于空天高精度控制對多重彈性振動抑制的必要要求以及空間機(jī)器人建模誤差及外部干擾的普遍存在性,本文針對基座、關(guān)節(jié)、臂全彈性空間機(jī)器人系統(tǒng),設(shè)計(jì)了基于WNN結(jié)構(gòu)、混合軌跡法、減振線性二次最優(yōu)法的自適應(yīng)非奇異快速終端滑模復(fù)合控制算法。根據(jù)奇異攝動理論將全彈性系統(tǒng)分解為包含基座、關(guān)節(jié)彈性振動的快變子系統(tǒng),包含基座、關(guān)節(jié)剛性運(yùn)動及桿彈性振動的慢變子系統(tǒng)。減振線性二次最優(yōu)法抑制快變子系統(tǒng)多重彈性振動,自適應(yīng)非奇異快速終端滑模控制實(shí)現(xiàn)系統(tǒng)剛性運(yùn)動的高精度追蹤,滿足對建模誤差、外部干擾的不敏感性。混合軌跡法抑制多桿彈性振動,最后仿真校驗(yàn)了算法的可行性。
1 動力學(xué)建模及奇異攝動分解
1.1 基座、關(guān)節(jié)、臂全彈性空間機(jī)器人動力學(xué)建模
基座、關(guān)節(jié)、臂全彈性影響下的漂浮基空間機(jī)器人結(jié)構(gòu)如圖1所示,其中,B0表示基座,Bi(i=1,2)為柔性桿,q0為基座姿態(tài)角,qi(i= 1,2)為關(guān)節(jié)轉(zhuǎn)角,qmi(i= 1,2)為關(guān)節(jié)電機(jī)轉(zhuǎn)子轉(zhuǎn)角。將彈性基座、關(guān)節(jié)分別等效為線性彈簧、扭轉(zhuǎn)彈簧[19],qb為基座彈性變量,σi=qmi-qi(i= 1,2)為關(guān)節(jié)柔性變量。柔性臂視作Euler-Bernoulli簡支梁,用假設(shè)模態(tài)法分析,并保留前兩階模態(tài),vi(t)為t時(shí)刻桿Bi任意截面處橫向彈性變形。建立慣性坐標(biāo)系OXY及各分體連體坐標(biāo)系OjXjYj(j= 0,1,2),其中,O0與載體質(zhì)心重合,Oi(i= 1,2)在關(guān)節(jié)鉸幾何中心,OC為系統(tǒng)總質(zhì)心。

圖1 基座、關(guān)節(jié)、臂全彈性空間機(jī)器人Fig.1 Space robot with flexible-base two-flexible-link and two-flexible-joint
不計(jì)電機(jī)轉(zhuǎn)子質(zhì)量及重力,考慮外部擾動的影響,根據(jù)系統(tǒng)在慣性坐標(biāo)系中的幾何位置關(guān)系,結(jié)合質(zhì)心定理,拉格朗日方程得載體位置不控、姿態(tài)受控動力學(xué)模型:

1.2 模型奇異攝動分解

其中, I ∈R2×2為單位矩陣,Kc∈R2×2為對稱正定補(bǔ)償矩陣,un=unk+uns∈R2×1為待設(shè)計(jì)的控制器,式中unk為快變子系統(tǒng)控制器,uns為慢變子系統(tǒng)控制器。
根據(jù)動力學(xué)模型式(1)-(3),快、慢變子變量,

總控制器式(4),得包含qb、σ的快變子系統(tǒng):

包含q、δ的慢變子系統(tǒng):


2 控制算法分析
2.1 快變子系統(tǒng)控制器設(shè)計(jì)
利用線性二次最優(yōu)算法同時(shí)抑制快變子系統(tǒng)式(5)中 bq、σ的振動,構(gòu)造性能指標(biāo)函數(shù)其中Rk∈R2×2為對稱正定矩陣,分別表示qk與unk的性能量度權(quán)重,現(xiàn)將快變子系統(tǒng)控制器(線性最優(yōu)雙重彈性減振控制器)設(shè)計(jì)為:

其中,Pk為黎卡提方程的解。
2.2 慢變子系統(tǒng)控制器設(shè)計(jì)

2.2.1 魯棒非奇異快速終端滑模控制
定義變量:
其中,x∈Rn為任意矢量,?≥1為正常數(shù),由式(10)得:

定義位置追蹤誤差e=q-qd,其中qd表示系統(tǒng)基座姿態(tài)、關(guān)節(jié)期望軌跡矢量。設(shè)計(jì)非奇異快速終端滑模面為:

式中,k1>0,k2>0,1<β<2,γ>β。
滑模面式(12)對時(shí)間求導(dǎo),并根據(jù)式(10)(11)得:


設(shè)計(jì)魯棒非奇異快速終端滑模控制器(Robust nonsingular fast terminal sliding mode control,RNFTSMC)為:

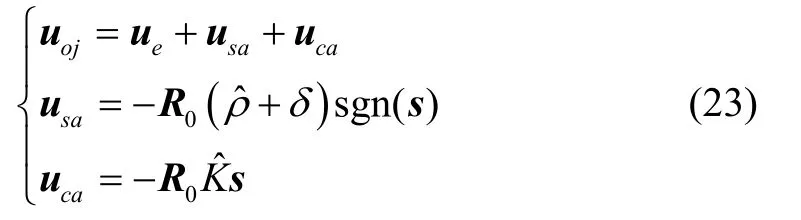
式中,us=-R0(ρ+δ)sgn(s)為切換控制器,uc=-R0Ks為補(bǔ)償控制器,補(bǔ)償系統(tǒng)不確定性引起的擾動。δ與K為任意正常數(shù)。
將式(15)代入式(13)得:

定理1:對于慢變剛性子系統(tǒng)式(9),在設(shè)計(jì)的RNFTSMC控制律式(15)作用下,可確保系統(tǒng)剛性變量追蹤誤差e在有限時(shí)間內(nèi)收斂到0。
時(shí)間求導(dǎo),并代入式(16)得:

其中,b1,b2為正常數(shù),具體表達(dá)式如下所示:

為便于后文計(jì)算,式(17)計(jì)算得:

選取系統(tǒng)誤差從e≠0到e=0的趨近時(shí)間為tr,式(18)在 0~tr上取積分得:

若2b選取足夠大,可以確保下式成立:

基于上述分析可知,所設(shè)計(jì)的RNFTSMC,可以確保系統(tǒng)式(9)在有限時(shí)間內(nèi)收斂到0。證畢。
2.2.2 基于WNN的自適應(yīng)非奇異快速終端滑模控制
NFTSMC的設(shè)計(jì)是假設(shè)總誤差Δu的最大上界ρ已知的,實(shí)際工作中,ρ值很難估算或求取,而且,為了確保控制器的有效性,當(dāng)Δu增大,ρ也增大,但是控制器中ρ值一旦確定,無法自行調(diào)整,導(dǎo)致抖振甚至控制失效,NFTSMC的局限性比較明顯。因此,本節(jié)利用神經(jīng)網(wǎng)絡(luò)對ρ估計(jì),目前,使用神經(jīng)網(wǎng)絡(luò)估計(jì)不確定性上限已獲得良好性能,考慮到WNN網(wǎng)絡(luò)結(jié)構(gòu)節(jié)點(diǎn)少,逼近未知函數(shù)速度快,所以用來逼近ρ值。WNN在隱藏單元中包含有小波函數(shù),結(jié)構(gòu)如圖2所示。
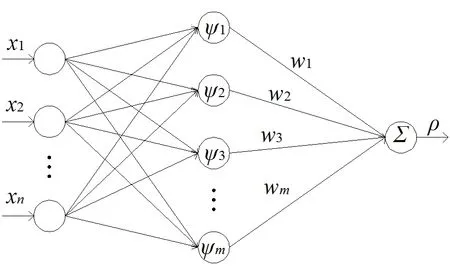
圖2 小波神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)圖Fig.2 Wavelet neural network structure diagram

式中,mij為WNN節(jié)點(diǎn)伸縮參數(shù),bij為節(jié)點(diǎn)平移參數(shù)。輸出值ρ表達(dá)式為ρ=WTΦ,其中。

設(shè)計(jì)基于WNN的自適應(yīng)非奇異快速終端滑模控制(Adaptive nonsingular fast terminal sliding mode control based on WNN, ANFTSMC-W)為:
更新律為:
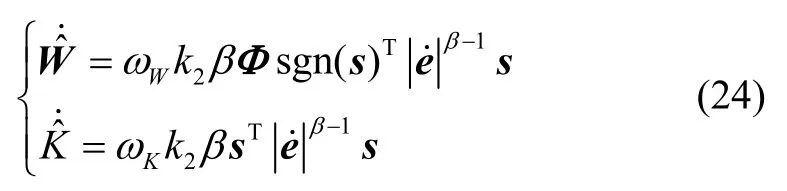
其中,ωW,ωK為任意正常數(shù),將式(23)(24)代入式(13)得:

定理2:對于子系統(tǒng)式(9),在建模誤差與外部擾動完全未知的情況下,ANFTSMC-W控制律式(23),及更新律式(24),可確保系統(tǒng)狀態(tài)漸近收斂于滑模面s=0上。
證明:構(gòu)造李雅普諾夫函數(shù)2V∈R為:

V2對時(shí)間求導(dǎo),并代入式(23)(25)得:
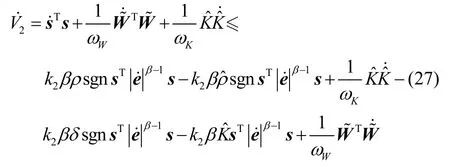
將式(24)代入式(27)得:
根據(jù)李雅普諾夫穩(wěn)定性理論得,慢變剛性子系統(tǒng)式(9)采用ANFTSMC-W控制律式(23)及更新律式(24),可確保從初始狀態(tài)收斂到滑模面s=0上,結(jié)合定理1,得系統(tǒng)有限時(shí)間穩(wěn)定,證畢。
2.2.3 改進(jìn)的WNN非奇異快速終端滑模控制
ANFTSMC-W只能實(shí)現(xiàn)慢變子系統(tǒng)基座姿態(tài)、關(guān)節(jié)q的軌跡精確追蹤,卻不能抑制臂彈性振動。為此使用虛擬力概念,修正原有的期望軌跡,構(gòu)造混合軌跡qh,設(shè)計(jì)改進(jìn)的ANFTSMC-W算法,實(shí)現(xiàn)q跟蹤及δ的抑振控制。引入虛擬力F∈R3×1,定義eh=qh-qd,生成eh的指令發(fā)生器如下所示:

其中,A,B∈R3×3為常正定對角矩陣。
令混合誤差er=q-qh,將控制器式(23)及更新律式(24)中qd、e及s分別替換為qh、er及sr,得改進(jìn)后的ANFTSMC-W為:
更新律為:

將控制器式(30)代入剛性子系統(tǒng)式(7)得:


設(shè)計(jì)虛擬力F為:

其中,Rs為性能指標(biāo)函數(shù)中F對應(yīng)的加權(quán)矩陣,Ps為對應(yīng)黎卡提方程的解。當(dāng)ηs=0或滿足條件式(35)時(shí),系統(tǒng)穩(wěn)定[20]。

3 仿真試驗(yàn)與分析
為了驗(yàn)證本文提出的ANFTSMC-W的有效性,擬對圖1所示的存在建模誤差及外部擾動的全彈性空間機(jī)器人分別進(jìn)行彈性不控模式與彈性控制模式下的仿真研究。
全彈性空間機(jī)器人精確已知的模型參數(shù)值為:ρ1= 3.5kg·m ,ρ2= 1.1kg·m ,Jm1=Jm2= 0.1kg· m2,EI1=EI2= 100N/m2,km1=km1= 50Nm/rad ,kb= 500N/m 。對于存在建模誤差的參數(shù),以誤差值占標(biāo)稱值的20%為指標(biāo),即ξ=ξ0+0.2ξ0,其中ξ0為標(biāo)稱值,ξ為真實(shí)值。取基座標(biāo)稱質(zhì)量 (m0)0= 33kg ,標(biāo)稱轉(zhuǎn)動慣量 (J0)0= 25kg· m2,兩桿標(biāo)稱桿長(l1)0=(l2)0= 1.25m 。仿真起始,設(shè)系統(tǒng)彈性構(gòu)件(基座、關(guān)節(jié)、臂)均未變形,O0O1的距離l0= 1.5m ,初始構(gòu)形取為qb(0 ) = 0m ,q(0 ) =[ 0.7,0.95,1.2]Trad,δ( 0)=0m ,qm(0 ) =[ 0.95,1.2]Trad ,各構(gòu)型高階項(xiàng)的初值全部取為 0,外部干擾選取為ud=[ 0 .5,0.5,0.5]T(N·m)。
取期望軌跡為qd=[ 0.5,1,1.5]Trad 。采用四階Runge-Kutta方法仿真,步長0.01 s,控制器參數(shù)選取為Kc=diag(80,80),k1=k2= 0.1,γ=2.2,β=1.5,δ=ωW=ωK= 0.1。
3.1 彈性不控模式
關(guān)閉基座、關(guān)節(jié)彈性振動主動控制器unk,不采用抑制臂振動的虛擬力F,運(yùn)用式(4)(23)(24)構(gòu)成的算法仿真,結(jié)果如圖3-5所示,其中,圖3表示系統(tǒng)剛性軌跡q的追蹤曲線,圖4為快變子系統(tǒng)彈性變量qb、σ的振動曲線,圖5為慢變子系統(tǒng)彈性桿前兩階模態(tài)振動曲線。

圖3 軌跡跟蹤曲線Fig.3 Trajectory tracking curves
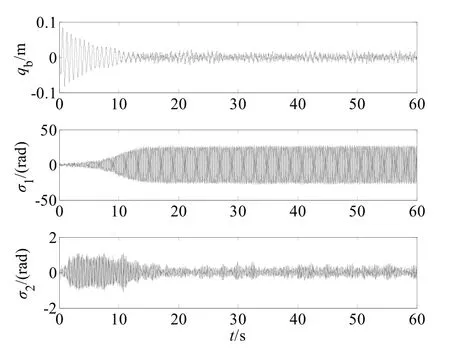
圖4 基座、關(guān)節(jié)彈性振動曲線Fig.4 Elastic vibration curves of base and joints

圖5 桿彈性振動曲線Fig.5 Elastic vibration curves of links
由圖3可知,基座姿態(tài)、關(guān)節(jié)1,關(guān)節(jié)2軌跡跟蹤振幅分別為0.01rad,0.02rad,0.005rad,收斂時(shí)間在2s以內(nèi)。軌跡跟蹤振幅小,收斂時(shí)間快,說明所設(shè)計(jì)的ANFTSMC-W控制律,在系統(tǒng)存在彈性影響的情況下,對系統(tǒng)建模誤差及外部干擾具有不敏感性,滿足快速收斂條件。由圖4-5可知,基座的彈性振幅在0.015m左右,關(guān)節(jié)2的彈性振幅在0.3rad左右,桿1與桿2的一階模態(tài)振幅均在0.01m左右。由于建模誤差及外部擾動等激勵作用,關(guān)節(jié)1及桿1的二階模態(tài)振動明顯增加。
3.2 彈性控制模式
開啟基座、關(guān)節(jié)彈性振動主動控制器unk、并引入虛擬力F,運(yùn)用式(4)(8)(30)(31)(34)構(gòu)成的算法仿真,結(jié)果如圖6-8所示,其中,圖6為系統(tǒng)剛性軌跡跟蹤曲線,圖7為qb、σ振動曲線,圖8為兩桿前兩階模態(tài)振動曲線。

圖6 軌跡跟蹤曲線Fig.6 Trajectory tracking curves

圖7 基座、關(guān)節(jié)彈性振動曲線Fig.7 Elastic vibration curves of base and joints

圖8 桿彈性振動曲線Fig.8 Elastic vibration curves of links
由圖6-8可知,采用本文的復(fù)合控制算法,q的跟蹤精度顯著提高,關(guān)節(jié)1、關(guān)節(jié)2的振動被抑制在±0 .1rad, ± 0.05rad 以內(nèi),收斂時(shí)間在2s以內(nèi),桿1、桿2的一階模態(tài)振動被抑制在±1.8mm以內(nèi)。基座、關(guān)節(jié)、臂的振動均得到有效抑制,并且穩(wěn)定后的振動維持在許可范圍內(nèi)。證實(shí)了本文提出基于WNN的自適應(yīng)非奇異快速終端滑模控制及多重彈性減振控制構(gòu)成的復(fù)合控制算法具有跟蹤精度高、響應(yīng)速度快、避免奇異性(由所設(shè)計(jì)的非奇異滑模面決定)、對外界干擾和建模不確定性具有較強(qiáng)的魯棒性,并抑制多重彈性振動的特點(diǎn)。
4 結(jié) 論
針對存在參數(shù)建模誤差及外部干擾的基座、關(guān)節(jié)、臂全彈性空間機(jī)器人系統(tǒng),提出了一種基于WNN的自適應(yīng)非奇異快速終端滑模控制算法。采用奇異攝動法分解全彈性空間機(jī)器人為慢、快變子系統(tǒng)。然后設(shè)計(jì)相應(yīng)的控制算法,用WNN估計(jì)系統(tǒng)建模誤差與外部干擾的最大上界,用虛擬力抑制臂的振動,所設(shè)計(jì)的滑模面避免奇異值的產(chǎn)生。仿真結(jié)果表明,復(fù)合算法對系統(tǒng)建模誤差與外部干擾具有魯棒性,并且自主估計(jì)其有限上界,能主動控制系統(tǒng)基座、關(guān)節(jié)、臂多重彈性振動,且在有限時(shí)間內(nèi)穩(wěn)定、快速收斂。
由上述結(jié)論可知,文中所提出的算法能實(shí)現(xiàn)對全彈性空間機(jī)器人的運(yùn)動振動控制,未來將對如何利用全彈性空間機(jī)器人實(shí)現(xiàn)對非合作航天器的捕獲操作開展進(jìn)一步研究。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16