基于貪心選擇及斜率探測擴充的軌面提取方法
2022-01-18 11:39:10曹義親劉龍標丁要男
計算機與生活 2022年1期
關鍵詞:區域
曹義親,劉龍標,何 恬,丁要男
華東交通大學 軟件學院,南昌330013
現代鐵路行業的高速發展面臨著列車不斷增長行駛速度、運營里程、載重負荷的挑戰,無疑增加了軌道基礎設施的安全隱患。鋼軌是軌道基礎設施的重要組成部分,受高密度的交通、高負荷的載重以及外界自然環境的作用,表面會產生一定的磨蝕損耗,影響列車行駛的舒適度和安全性。因此,及時檢測出軌面缺陷,向有關部門提供可靠維護數據,增加鋼軌的可靠性、安全性和使用壽命,對于鐵路系統的運維具有十分重要的現實意義。
基于機器視覺的檢測方法具有非接觸、精度高、時耗低等優點而成為前沿的研究方法之一。國內外許多學者開展了關于鋼軌表面缺陷檢測的研究,并取得了一定成果。金俠挺等提出了基于貝葉斯卷積神經網絡(convolutional neural network,CNN)和注意力網絡的鋼軌表面缺陷檢測方法,該方法擴展了深度學習語義分割框架,實現表面缺陷的概率分割,分割精度高,速度快。Yu 等提出了一種從粗到細的鋼軌表面缺陷識別模型,該模型從子圖像級、區域級和像素級三個不同的尺度來對缺陷進行檢測,能有效減弱光照反射不均和其他噪聲干擾,檢測效果顯著。但軌道圖像尺寸大小參差不齊,不僅包含研究者感興趣區域(鋼軌表面區域),還包含干擾區域(軌枕、扣件、碎石等),為降低基于視覺的軌面缺陷檢測難度,減小軌面磨蝕缺陷的搜索空間和檢測時間,避免軌面兩側的碎石、扣件、雜草等干擾,需精準快速提取軌面區域。
唐湘娜等提出了基于水平投影(horizontal projection,HP)的軌面區域提取算法,算法計算簡單,但全局閾值的選取很難統一確定,且需要手動確定軌面邊界,自適應性差;王耀南等提出了基于豎直投影(vertical projection,VP)的軌面區域提取算法,該法利用灰度均值二值化后的第一個連續10 個值都是1 或0 的點確定邊界,偶然性太大。Li 等提出了基于軌跡提取投影(track extraction based projection algorithm,TEBP)的軌面區域提取算法,計算軌道圖像中每條縱向線的平均強度投影輪廓,搜索輪廓累積值最大的定長區間,效果不錯,但是對光照敏感,需要預先給定軌面的寬度,容易導致提取結果整體偏移。文獻[9]和文獻[10]提出了基于Hough 的列像素累積灰度強度(Hough-based pixel column cumulation gray,HPCG)的軌面區域提取算法,該方法本質和TEBP 類似,效果有一定的提升,但計算更復雜,具有相同的弊端。賀振東等提出列直方圖最小值法(column histogram minimization method,CHMM)對軌面區域進行提取,首先計算軌道圖像的列直方圖,然后按照固定軌寬間隔搜索最小值對應鋼軌位置,算法簡單,但是對圖像質量要求高,仍需要預先給定軌面的寬度,魯棒性差。
上述軌面區域提取算法均是在軌道圖像的RGB色彩空間的灰度圖上進行相應操作,理想情況下的軌面區域灰度值會比非軌面區域灰度值大,但是由于軌道圖像整體受光照不均、軌面存在陰影、銹跡、各種磨蝕損耗等,往往會打破理想情況下的灰度分布規律,給基于RGB 色彩空間的軌面區域提取帶來了困難。
Min 等針對該問題提出了基于HLS 色彩空間的軌面區域識別方法(extraction based on HLS space,EHLS),通過提取其H 分量圖像,利用H 值突變特征提取軌道圖像中軌面邊界,此方法能減弱環境光照影響,但不能消除軌面諸如銹跡、陰影帶來的干擾,且耗時較長。顧桂梅等提出了基于HSV 色彩空間的軌面區域提取算法(extraction based on HSV space,EHSV),通過提取其S 分量圖像,分別找到以圖像中點為軸兩側列灰度投影曲線的極大值和極小值,再根據它們的關系自動確定邊界,此方法能較大程度地消除自然因素和軌面噪聲干擾,但無法在軌頭圓角處(rounded corners of the rail head,RCRH)存在塵泥等噪聲干擾時將軌面進行完整的提取,且需要假定軌面在軌道圖像中央。
針對上述問題,本文利用YUV 色彩空間中的V分量圖像,提出了一種全新的鋼軌表面區域提取算法。首先將RGB 軌道圖像轉化到YUV 空間,提取其V 分量,可以克服環境光照以及其他軌面噪聲的干擾;其次繪制V 分量的灰度投影反轉曲線,利用該曲線灰度均值和中值確定一個合適的閾值,進行候選軌面區間的劃分,減弱非軌面區域干擾;隨后利用貪心算法求出劃分后曲線中的最大子序和區間,進行軌面粗提取;最后利用斜率探測擴充法進行軌面精提取,在粗提取邊界兩側進行一定距離的斜率探測,用偏轉角大于設定閾值的中間位置更新軌面邊界。本文方法不需要提前給定軌面寬度、假定軌面在軌道圖像的中央和手動確定邊界等前提條件,且能在RCRH 區域存在噪聲干擾時將軌面完整提取,精度高,耗時低,魯棒性強。
1 軌道圖像分析
1.1 RGB 空間軌道圖像灰度分析
如圖1(a)所示,實際采集的軌道圖像不僅包含軌面區域,還包括軌枕、扣件、碎石、雜草等非軌面干擾區域,而且軌面區域受高密度交通、高負荷載重以及外界自然環境的作用,會產生一定的磨蝕缺陷、銹跡、塵泥和陰影等。大多數研究者均基于RBG 空間的灰度圖對鋼軌表面進行提取,因此對軌道圖像的灰度特征進行全面分析尤為必要。

圖1 實際采集的軌道圖像Fig.1 Rail image collected in practical environment
圖2(a)、(b)為圖1(a)軌道圖像的灰度分析劃分圖與結果,沿著軌面方向劃有8 道縱線(1~8):其中4 條穿過軌面區域(3~6,它們分別穿過強光照、正常、銹跡和塵泥軌面區域),4 條穿過干擾區域(1、2、7 和8)。
通過分析,可以得出以下結論:
(1)正常情況下的軌面區域灰度值大于干擾區域,且灰度變化均勻,如圖2(b)4 曲線所示。
(2)軌面出現陰影、銹跡、塵泥干擾時會打破常規,如圖2(b)穿過銹跡的5 曲線已和干擾區域融為一體,難以區分。再如圖2(b)穿過塵泥的6 曲線,雖然灰度變化均勻,但灰度值遠低于正常軌面。
(3)如圖2(c)的軌道圖像投影曲線所示,軌面區域灰度值一般大于均值,存在干擾時會低于均值,干擾區域灰度值一般低于均值,但是由于光照等影響可能會高于均值。

圖2 軌道圖像灰度分布圖Fig.2 Gray scale distribution of rail image
綜上所述,由于軌道圖像的灰度值容易受環境光照、軌面噪聲等因素影響,通過濾波技術和改進算法也無法很好地解決該問題,且容易增加算法復雜度和提取時間。因此基于RGB 空間的鋼軌表面區域提取的方法存在較大困難,本文將對軌道圖像的其他常用的色彩空間進行探索。
1.2 亮色分離的色彩空間分析
顏色空間按照基本結構一般可分為兩大類:基色顏色的空間和亮、色分離的色彩空間。前者的典型是RGB 色彩空間,后者包括HLS、HSV 和YUV 色彩空間等(HLS(色相Hue、亮度Lightness、飽和度Saturation);HSV(色相Hue、飽和度Saturation、明度Value);YUV(亮度Luminance Y、色度Chrominance U&V))。由上節可知,軌道圖像在基色顏色的空間中提取軌面存在較大難度,因此對軌道圖片使用常見的亮、色分離的色彩空間進行探索。
圖3 為圖1 中兩幅軌道圖像的HLS、HSV 和YUV色彩空間的映射圖,以及各自兩個色度分量的灰度圖(亮度分量圖和RGB 空間灰度圖差別不大,故不考慮)。

圖3 軌道圖像的三種色彩空間探索Fig.3 Three color spaces exploration of rail images
文獻[12]推薦的HLS 空間的H 分量圖,如圖3(a)、(b)的第(2)幅所示,該分量可以很好地減弱光照帶來的干擾,對比度強,但是無法消除軌面磨蝕缺陷等噪聲的干擾。文獻[13]推薦的HSV 空間S 分量,如圖3(a)的第(6)幅所示,該分量可以消除軌面磨蝕缺陷等噪聲的干擾,但是抗光照干擾效果不穩定,如圖3(b)的第(6)幅所示,對比度弱,左側的非軌面區域和軌面區域近乎融為一體,難以區分。如圖3(a)、(b)的第(9)幅所示,YUV 空間V 分量既能極大減弱光照不均對軌道圖像的干擾,也能較大程度消除軌面噪聲的干擾,軌面對比度高。故本文采用YUV 色彩空間的V 分量圖像對鋼軌表面區域進行提取。
2 基于YUV 空間的軌面區域提取方法
2.1 YUV 色彩空間簡介
YUV(亦稱YCrCb)是被歐洲電視系統所采用的一種顏色編碼方法,其中“Y”表示明亮度Luminance,也就是灰階值;而“U”和“V”表示的則是色度Chrominance。亮度是將RGB 信號的特定部分疊加到一起。色度則定義了顏色的色調與飽和度,分別用Cr 和Cb 表示。其中,Cr 反映了RGB 紅色信號值與亮度值之間的差異(即V),Cb 反映的是RGB 藍色信號值與亮度值之間的差異(即U)。將RGB 軌道圖像利用矩陣變換可以轉換到YUV 空間,其轉換公式如式(1)所示(RGB 取值范圍均為0~255):

2.2 基于貪心算法選擇及斜率探測擴充的軌面區域提取方法
本文提出的基于YUV 空間的貪心算法選擇及斜率探測擴充的鋼軌表面區域提取方法分為三個階段:首先RGB 色彩空間向YUV 色彩空間轉換,同時繪制其V 分量灰度反轉投影曲線,并經均值、中值變換得到軌面搜索曲線;其次尋找搜索曲線中的最大子序和區間的起止位置,初步確定軌面邊界(粗提取);最后向粗提取確定的邊界兩側進行一定距離的斜率探測擴充,獲得完整軌面(精提取)。軌面區域提取算法流程如圖4 所示。

圖4 軌面區域提取算法流程圖Fig.4 Flow chart of rail surface extraction algorithm
首先,假設沿軌面方向為軸,垂直軌面方向為軸,將實際鐵路中采集的RGB 軌道圖像(,)(以圖1 兩張軌道圖像為例,圖1(a)記作Rail_1,圖1(b)記作Rail_2),通過式(1)中的矩陣變換轉到YUV 色彩空間,并提取其V 分量灰度圖像(,),如圖3(a)第(9)幅子圖所示,通過色彩空間變換極大減弱了環境光照、軌面陰影、銹跡和磨蝕缺陷等噪聲干擾。
其次,計算灰度投影曲線,將V 分量灰度圖像(,)視為一個×的矩陣,則由軌道圖像矩陣中每列灰度均值組成1×維的矩陣()為:

式中,為坐標(,)的灰度值。隨后繪制灰度反轉投影曲線():

如圖5所示的軌道圖像灰度反轉投影曲線()可以看出:絕大部分軌面區域的高于其他區域且高于曲線均值和中值,但少量其他區域也滿足此要求。

圖5 軌道圖像的灰度反轉投影曲線Fig.5 Grayscale inversion projection curve of rail image
因此本文利用反轉曲線均值和中值確定一個閾值來變換該反轉曲線,得到V 分量的灰度反轉搜索曲線(),以此來減少非軌面區域的干擾,變換方式如下:

如圖6 所示,通過閾值變換后,得到軌道圖像V分量的灰度反轉搜索曲線,劃分出軌面候選區間,為下一步軌面區域粗提取奠定了基礎。
由圖6 可知,V 分量的灰度反轉搜索曲線中有一個或多個候選的軌面區間,且真實軌面區間長度往往最大,因此只需要尋找搜索曲線中的最大子序和區間,并確定該區間的起止位置,該起止位置初步確定為軌面邊界。

圖6 V 分量的灰度反轉投影搜索曲線Fig.6 Grayscale inversion projection search curve of V component
貪心算法主要解決使用單個數組作為輸入來查找最大(或最小)元素(或總和)的問題,得到全局最優方案,該算法可以在線性時間內解決問題,滿足軌面提取實時性要求。為此,本文采用貪心算法來實現軌面粗提取。
具體實現方法為:從反轉搜索曲線()第一個元素開始,一直往后迭代,將該曲線中的元素一個一個累加,如果當前子序列的和小于0,則重新開始搜索(由于上一步驟采用了閾值變換,使得搜索曲線中的元素有正有負,可利用有效增益思想,即如果當前子序列的和小于0,下一個元素加上當前子序列構成的區間一定不是最大子序和區間),直到遍歷完一次反轉搜索曲線(),時間復雜度為(),空間復雜度為(1),算法偽代碼如下。
軌面粗提取算法:
輸入:()/*灰度反轉搜索曲線*/
輸出:1、1/*軌面初步左右邊界*/


如圖7(a)所示的鋼軌截面圖可知,軌面區域不僅包括軌頭踏面,還包括軌頭圓角處RCRH 區域(軌頭踏面與軌頭側面交匯區域)。RCRH 區域由于與列車的車輪不直接接觸,容易在其表面積攢灰塵泥土,且塵泥與軌面區域對比度較大,現有色彩空間難以將其劃分到同一類別,如圖7(b)所示。此外,鐵路線路并非都是直線狀,大多數是大半徑曲線狀,當列車通過曲線狀軌道時,通常會出現輪軌兩點接觸的情況,且隨著半徑的減小輪軌磨擦增大,容易造成鋼軌波浪磨耗,嚴重時會使RCRH 區域軌面剝離,如圖7(b)切面2 左側所示。因此對RCRH 區域的準確提取十分重要。
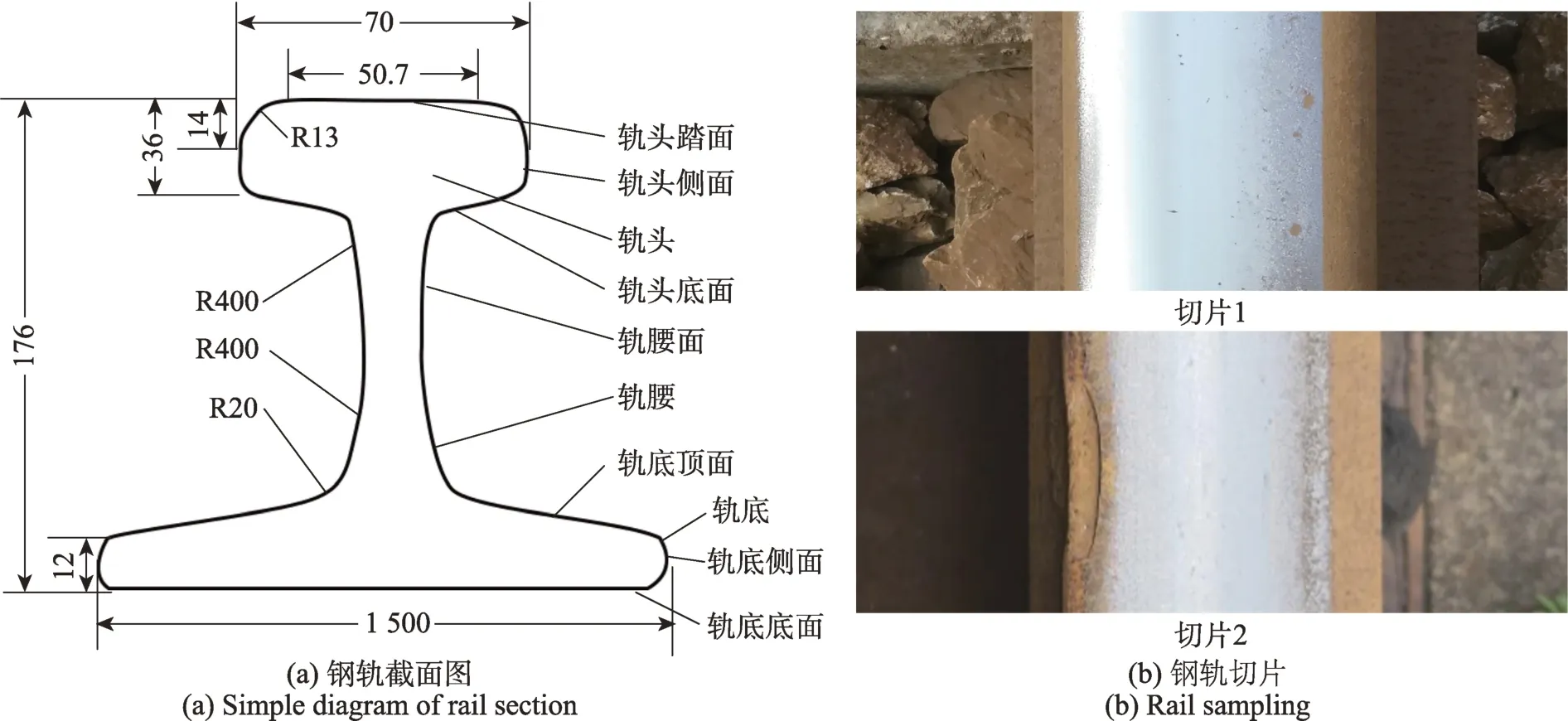
圖7 鋼軌頭部特征分析圖Fig.7 Analysis of rail head characteristics
如何精準快速地提取RCRH 區域,本文提出斜率探測擴充法來提取RCRH 在粗提取過程中未提取到的軌面區域。由圖5 的軌道圖像的灰度反轉曲線可以看出,當RCRH 區域出現塵泥干擾時,軌面和非軌面之間有一個灰度變化的過渡距離,而當RCRH 區域無干擾時,軌面和非軌面之間灰度值是突變的。根據此特點,可分析灰度反轉曲線粗邊界兩側一定距離的斜率變化(由于RCRH 區域一般約占軌頭踏面的40%,為使探測容錯性高,探測距離取粗軌面寬度的50%)。
如圖8 所示,由Rail_1 和Rail_2 粗提取確定的軌面邊界兩側斜率變化曲線圖可知(因粗提取確定的軌面區間已提取出,故將該區間內的斜率置為0,便于分析):當RCRH 區域存在干擾時,探測區域的斜率曲線呈現陡峰狀,真實的邊界在峰值附近,峰內側(靠近軌面的一側)類似谷底,即RCRH 區域斜率變化較大,且一直在攀升;峰外側(靠近非軌面的一側)類似山脈綿延,即非軌面區域斜率變化較小,且一直保持穩定,如圖8(a)左右兩側、圖8(b)的左側所示。當RCRH 區域不存在干擾時,探測區域的斜率曲線只呈現山脈狀,即全都是非軌面區域,即RCRH 區域的提取可在粗提取中完成,如圖8(b)的右側可知。

圖8 粗略邊界兩側斜率探測分析Fig.8 Slope detection analysis on both sides of rough boundary
因此可以選取一個合適的偏轉角度作為閾值來截斷該斜率曲線,如果有偏轉角大于的位置,把滿足該條件的所有位置中最中間的位置更新為最終軌面邊界。具體實現步驟如下:
首先計算粗提取的軌面寬度:

式中,1、1 為粗提取軌面的左右邊界。然后向粗提取的左右邊界兩外側進行0.5×距離的斜率探測(以右側為例)。

式中,為右側探測區間,為其對應的斜率。隨后計算出斜率對應的偏轉角度。

式中,RDR 為偏轉弧度,RDA 為偏轉角度。接著給定一個合適的軌面擴充偏轉角度,用它作為閾值來劃分探測區間內候選軌面邊界,并計算出最中間位置的邊界到粗提取軌面右邊界的距離_,該距離就是右側要擴充的軌面寬度,計算方法如下:

式中,SRP 為候選軌面邊界數組。同理可計算出左側要擴充的軌面寬度_。最后根據需要更新軌面左右邊界、:

式中,依然以右側為例,當_存在,即_≠0時,即探測區間內有偏轉角大于閾值的位置,此時需要更新右邊界為1+_,如圖9(a)Rail_1軌面右側斜率探測曲線所示;當_不存在,即_=0 時即探測區間內沒有偏轉角大于閾值的位置,此時不需要更新,仍然保留粗提取右邊界=1,如圖9(b)Rail_2 軌面右側斜率探測曲線所示。

圖9 粗略邊界右側斜率探測精分析Fig.9 Slope analysis on right side of rough boundary
3 實驗結果與分析
為驗證本文軌面提取算法的有效性,選用提取精度和提取時間Time兩個評價指標進行評價。本文實驗所采用的軟硬件配置:計算機配置為Intel Corei7 6700 CPU@3.40 GHz,8 GB 內存,64 位Win10 操作系統。編程集成開發工具IDE 為Anaconda Navigator中的Jupiter Notebook。編程環境為Python3,采用的框架有opencv、numpy、matplotlib 等。
3.1 性能評價指標
由于算法提取的軌面邊界和人工標注的軌面邊界不完全一致,本文采用交并比(intersection over union,IoU)來評價算法提取結果的精度。IoU 評價標準比較簡單,計算的是算法預測邊框和人工標注邊框的交集和并集之間的比值。
如圖10(a)IoU 示意圖所示。矩形邊框是算法提取的預測結果,矩形邊框是人工標注的實際結果,矩形邊框、交并比IoU 計算方法如下:

圖10 IoU 示意圖及其簡化圖Fig.10 IoU schematic and simplified drawings

由于實際采集軌道圖像當中,絕大多數軌面是垂直于圖像的,計算矩陣邊框的交并比可簡化為數組集合的交并比,如圖10(b)簡化圖所示。故本文采用簡化后的交并比IoUs 來評價軌面提取結果精度,計算方法如下:

式中,L和R分別為算法預測的軌面左右邊界坐標,L和R分別為人工標注的軌面左右邊界坐標。
3.2 偏轉角閾值θ 大小分析
為了盡可能提高算法的軌面提取精度,本文從實驗室收集整理的軌道圖像數據集中隨機選取50 張RCRH 區域帶塵泥噪聲的軌道圖像(該數據集是實驗室多年收集以及項目實施過程中鐵路有關部門提供合作整理而成的,共有圖片3 000 余張,其中帶塵泥噪聲的樣本500 余張,含有疤痕、剝落、裂紋三類缺陷的樣本465 張),測試精提取過程中不同偏轉角閾值大小對軌面提取精度的影響,綜合考慮提取精度的均值和方差兩個指標,選擇一個偏轉角最優閾值(={5°,10°,15°,20°,25°,30°,35°,40°,45°,50°,55°,60°,65°})。
如圖11(a)所示的提取精度均值圖可知,當閾值很小的時候,探測區域中滿足偏轉角大于閾值的位置很多,從而擴充了大量非軌面區域,因此精度較低;隨著值逐漸增大,滿足偏轉角大于閾值的位置逐漸減少,因此精度逐漸升高;但隨值增大到合適值時再繼續增大,滿足偏轉角大于閾值的位置越來越少,會導致真實軌面的RCRH 軌面無法充分擴充,此時精度又會逐漸下降。如圖11(b)所示提取精度方差圖也滿足類似趨勢,隨著值逐漸增大時,精度方差會逐漸減小,隨值增大到合適值時再繼續增大,精度方差又會增大。綜合考慮軌面提取精度均值和方差變化特點,本文把偏轉角閾值設置為25°,此時的平均提取精度達0.923 7。

圖11 IoU 示意圖及其簡化圖Fig.11 IoU schematic and simplified drawings
3.3 實驗結果與對比分析
在本實驗室收集整理的軌道圖像數據集中隨機選取150 張軌道圖像,其中50 張為RCRH 區域沒有或有少量塵泥干擾的圖像,100 張為RCRH 區域有大量塵泥干擾的圖像。采用平均提取精度IoUs、提取準確率Accuracy、平均提取時間Time 作為定量分析的評價指標。
如表1 所示,本文算法在RCRH 區域不存在塵泥等噪聲干擾時比該區域存在干擾時的提取精度和準確率要稍高,因為RCRH 區域存在噪聲干擾時,離真實軌面較近非軌面區域也會受到一定程度的噪聲干擾,此時容易把一部分非軌面區域劃分到預測軌面中,導致精度下降。從總體分析:平均提取精度可達0.926 9,提取準確率可達96.67%,平均提取時間為25.95 ms,算法效果較好。

表1 本文算法提取結果分析Table 1 Algorithm extraction results analysis
將本文方法與水平投影法HP、豎直投影法VP、軌跡提取投影法TEBP、基于Hough 的列像素累積灰度法HPCG、列直方圖最小值法CHMM、基于HLS 空間的軌道表面區域識別方法EHLS以及基于HSV 空間的軌面區域提取算法EHSV7 種軌面提取算法進行對比,并采用簡化后的交并比IoUs 作為軌面提取的精度性能指標(當IoUs 大于0.8 時,判定算法對當前軌道圖像軌面提取成功),算法運行10 次的平均時間作為其時耗性能指標。
如表2 所示,本文算法的提取精度高于其他對比算法,由于色彩空間轉換需要一定的時耗,在提取耗時上略高于沒有轉換色彩空間的算法(如TEBP 和HPCG 等),但均低于進行了色彩空間轉換的算法(如EHLS 和EHSV)。如圖12 所示,HP 和VP 算法均是以灰度投影曲線為基礎進行邊界判定,前者取的是軌面圖像中每列的白色像素個數的一半和投影曲線相交點作為邊界,后者曲線中第一個連續10 個值都是1 或0 的點確定邊界,這兩種方法的時間復雜度均為(),但HP 算法需要手動定界,因此HP 算法時耗比VP 高,且這兩種算法對軌道圖像要求都太理想化,因此用在實際軌道圖像中基本無效。TEBP 和HPCG 算法本質其實是一樣的,都是利用灰度累積值最大的定長區間確定軌面邊界,前者利用的列灰度均值搜索,后者利用的是列灰度和值搜索,這兩種方法的時間復雜度均為(),相差不大,但由于環境光照不均和軌面復雜噪聲影響了灰度分布,會導致結果整體偏移,軌面提取的精度不高。CHMM 算法與前兩種算法類似,但本質不同,提取結果與它們相同純屬巧合。該算法以列直方圖為基礎按照固定軌面寬度間隔搜索最小值確認邊界,但這最小值不一定出現在軌面區域,也可能出現在非軌面區域,偶然性大,準確率低,時間復雜度為()。EHLS 算法采用HLS 色彩空間中的H 分量圖像,此分量可以消除光照的干擾,但此分量不能消除軌面噪聲的干擾,因此利用H 值突變特征提取軌道圖像中軌面邊界精度不高,時間復雜度為(×),為算法中H 值探測分割線的條數。EHSV 算法采用HSV 色彩空間中的S 分量圖像,此分量可以減弱光照不均、軌面噪聲干擾,但不能消除RCRH 區域的塵泥干擾,對此區域也無相應處理,故提取精度有待提升,時間復雜度為()。本文算法采用YUV 色彩空間的V 分量圖像,此分量極大降低軌道圖像對光照的敏感度以及軌頭踏面的噪聲干擾,采用基于貪心算法選擇的最大子序和區間法對軌面進行粗提取,采用斜率探測擴充法對實際軌面進行擴充,很好地保證了在RCRH 區域存在塵泥等噪聲干擾時也能被完整地提取,時間復雜度也為(),但由于初提取時采用貪心算法以及精提取時只需要探測一個粗提取確定的軌面距離,時間消耗仍然控制在線性階,因此本文算法提取效果較優。

圖12 多種軌面提取算法對比結果Fig.12 Comparison results of various rail surface extraction algorithms

表2 不同軌面提取算法性能對比Table 2 Performance comparison of different rail surface extraction algorithms
4 結論與展望
本文針對軌道圖像具有環境光照不均,軌頭踏面存在各種磨蝕缺陷、陰影、銹跡,RCRH 區域存在塵泥難以提取等問題,提出了基于YUV 空間的貪心算法選擇及斜率探測擴充的鋼軌表面區域提取方法。新方法基于YUV 空間V 分量,采用貪心算法選擇最大子序和區間進行軌面粗提取,斜率探測擴充法進行軌面精提取,具有以下4 個優點:
(1)采用基于YUV 色彩空間極大降低了軌道圖像對環境光照的敏感度,且極大減弱了軌頭踏面各種磨蝕缺陷、陰影、銹跡的干擾。
(2)基于貪心算法選擇的最大子序和區間的軌面粗提取算法,無需預先給定軌面寬度,無需軌面在圖像中央,無需手動提取邊界,且速度快。
(3)基于RCRH 區域斜率探測擴充法的軌面精提取算法,能很大程度地提升軌面提取精度,且只需要探測粗提取軌面寬度的距離,計算量小,耗時少,滿足實時性要求。
(4)本文軌面區域提取算法可變參數較少,易于調節,可維護性高。
本文算法泛化能力較好,軌面區域提取精度可達0.926 9,提取準確率可達96.67%,均高于相關算法,平均提取時間為25.95 ms,較其他方法有一定的減少,在軌道缺陷檢測中具有一定的實用價值。
本文僅研究了軌面與軌道圖像垂直的情況,軌面與軌道圖像存在偏轉角度的情況和算法時耗的進一步優化將是后續研究的內容。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15