基于信息融合的駕駛輔助模塊標定集成工位開發
2022-01-18 12:06:46湯天殷高旭峰王天軍李峰
汽車實用技術 2021年24期
湯天殷,高旭峰,王天軍,李峰
基于信息融合的駕駛輔助模塊標定集成工位開發
湯天殷,高旭峰,王天軍,李峰
(上汽通用汽車有限公司,上海 201206)
駕駛輔助模塊作為實現車輛駕駛輔助乃至自動駕駛的重要組成部分,其探測的精度和準確度,將會直接影響駕駛輔助功能的性能和客戶滿意度。因此,需要對駕駛輔助模塊在車輛下線后進行標定。為了滿足各種模塊不同的標定需求,以及標定過程中車輛、模塊、設備和環境狀態的要求,文章結合信息融合技術,開發了一種能夠適應多種駕駛輔助模塊標定的集成工位(設備)。其中,根據探測信息的特殊性,設計了部分數據在數據分析層進行預融合的混合架構,實現了快速、準確完成各模塊標定的目標。
駕駛輔助模塊;信息融合;下線標定;集成工位
引言
隨著自動駕駛概念的市場號召力逐步提升,越來越多的汽車公司將駕駛輔助作為新產品的賣點吸引消費者。要實現駕駛輔助,就離不開車載駕駛輔助模塊(車載雷達、攝像頭、夜視儀等)對車輛所在環境的探測。不同的駕駛輔助模塊采用不同的探測方法,對車輛周邊環境進行探測,以供負責集成的ECU進行計算分析,并作出響應。隨著駕駛輔助模塊的增多,以及其功能從給客戶提示發展成為自主執行應對,駕駛輔助模塊的精度和準確性將會直接影響到駕駛輔助的性能和客戶的滿意度。因此,這些模塊的標定也就成為車輛下線后必須進行的工作之一。本文針對多個駕駛輔助模塊的下線標定需求,結合信息融合技術,開發了一種適用于多個駕駛輔助模塊標定的集成工位(設備)。
1 ADAS功能及其模塊的標定需求
1.1 ADAS技術
ADAS技術,即先進汽車輔助駕駛系統(Advanced Driving Assistance System),是指通過安裝在車輛上的各種駕駛輔助模塊(傳感器),對不同方向、不同距離、不同速度的車輛周邊人、車、道路環境及障礙物進行識別,并利用這些數據進行計算與分析,輔助駕駛人員進行決策與操作的系統[1]。
車輛的ADAS系統可以分為三個部分[1],即感知層,決策層和執行層。感知層,即本文主要討論的諸如雷達、攝像頭等傳感器模塊,主要負責ADAS系統中車輛所處環境的信息收集工作。決策層,是指針對收集到信息進行計算分析,并根據設定的程序規則進行決策的部分。決策層的計算工作通常由車輛ECU承擔。執行層,即是根據決策層發出的指令,進行具體動作執行的機構,例如制動系統,轉向系統,儀表板聲光等等。如果把ADAS系統比作一個人,那么感知層就是“眼睛”,決策層就是“大腦”,而執行層就是人的“手”和“腳”。若要完成一項工作,離不開三者間的配合。
1.2 ADAS模塊及其下線標定需求
ADAS技術是一個復雜的多學科集成系統。其中,作為“眼睛”的傳感器模塊,負責正確、及時地將車輛周邊的信息發送給“大腦”以供決策。因此,傳感器模塊的探測準確性,就直接影響了整個ADAS系統的工作。
由于這些模塊是通過各種不同的結構被安裝在車輛上,而車輛相關的設計尺寸鏈也較為復雜。因此,需要在安裝完成后有一個標定的過程,才能確認模塊相對于車輛參考坐標系的位置姿態。標定的主要目的是為了找到模塊自身探測坐標系與車輛參考坐標系之間的轉換關系,以提高獲取信息的精確度。
下面簡單介紹目前主流的ADAS模塊及其標定的需求:
(1)車載毫米波雷達。
作為最為常見的駕駛輔助傳感器模塊,毫米波雷達探測距離較遠,有較強的適應性并具有一定的精度。由于它具有尺寸小、結構簡單的優勢[2],目前在高端車型中已有大量的使用。毫米波雷達的下線標定,主要采用專用的雷達波反射板作為基準目標,通過主動或被動地調整自身姿態,獲取反射信號,并以此調整自身的探測坐標系[3]。
(2)車載前攝像頭。
車載前攝像頭,是通過視頻圖像的捕捉與分析,探測前方車道線、車輛或障礙物的模塊。前攝像頭由于其成本較低和實現功能較多的特點,成為使用最廣泛的ADAS模塊[4]。前攝像頭的標定,主要采用了二維圖像的捕捉方式,采用基準位置的黑白塊作為目標進行姿態的糾正。
(3)紅外夜視儀。
紅外夜視儀最初是從軍事與航海引入到車載駕駛輔助領域的。在惡劣天氣下,紅外夜視儀具有更遠的識別距離,更精準的識別能力,尤其是對移動的人或動物,有很好的適應性[5]。夜視儀的標定,采用了發熱電阻絲在特定溫度下組成的特殊圖案作為基準目標來識別自身的姿態。
(4)抬頭顯示HUD。
抬頭顯示HUD模塊嚴格意義上并非“感知層”的傳感器模塊,而是將“決策”信息,連同車速、轉速和導航等進行顯示。隨著HUD圖像成像深度的加深,范圍的擴大,以及圖像更加精細,就需要對HUD的成像位置進行標定[6]。這種標定過程采用了模擬人眼的攝像機伸入駕駛室,對HUD成像進行捕捉并進行調整。
2 基于信息融合的集成標定工位開發架構
2.1 信息融合技術
信息融合技術,又稱為多傳感器信息融合,是對來自多個傳感器的多種信息源在特定的融合規則下進行綜合分析,從而進行決策處理的一種技術。其中,多傳感器是硬件基礎,信息的融合是手段,而綜合優化處理則是目的[7]。
從信息融合層次的角度,可以將信息融合的結構分為數據級、特征級和決策級[8]。不同層級數據融合是根據不同需求所決定的。雖然越高層級的融合具有更高的靈活性,但是其復雜性也會相應提高,同時處理效率可能會有所降低。
2.2 基于信息融合的集成標定工位開發的架構
針對駕駛輔助模塊標定過程中車輛定位、狀態診斷、環境探測等要求,本文采用了特征級和決策級相混合的復合結構,作為集成標定工位的開發架構。
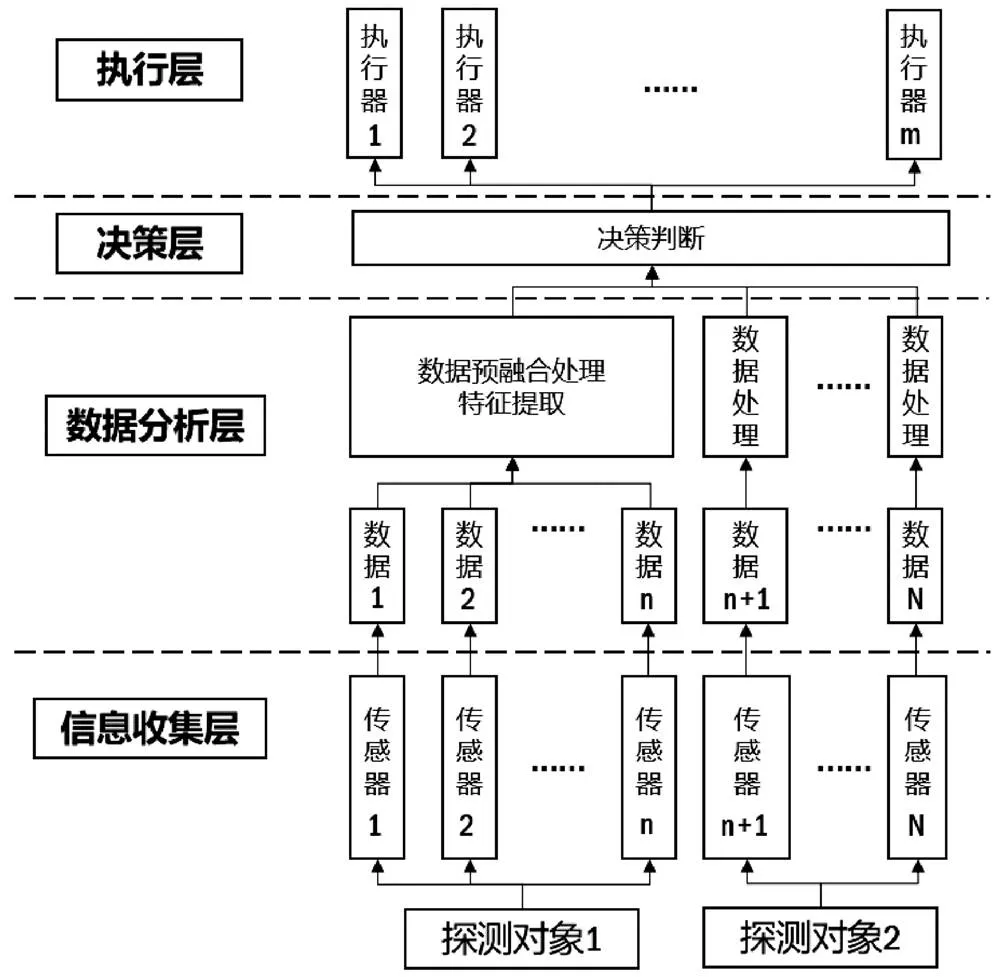
圖1 基于信息融合的集成標定工位開發架構
從圖1中可以看到,參考信息融合的傳統分層方法[9],開發架構可分為四個層級:信息收集層、數據分析層、決策層和執行層。其中,依靠不同的傳感器,信息收集層承擔了對探測對象的信息收集工作。數據分析層,則是對傳感器獲得的數據,根據需求進行融合預處理,或者單獨進行處理,提供給上一層。而決策層所需承擔的是綜合數據層融合后或單獨處理后的決策依據,根據一定的規則進行決策。執行層,包括了不同的執行器,在決策層的指令下執行相關的操作。
信息融合技術,在整個集成工位的開發中,嵌入到了數據分析層與決策層。對于那些探測對象明確,存在簡單相互關聯的數據,在數據分析層即進行數據的融合預處理,提取其中的特征。這種預融合的方式,有助于加快決策效率。對于較為獨立的信息數據,架構中直接將其輸入到決策層,有助于降低系統整體的復雜程度。
3 集成標定工位的開發
3.1 集成標定工位的標定條件
由于車輛的ADAS功能大都是以組合形式出現,所以一輛下線車輛往往需要同時進行雷達、攝像頭、夜視儀和HUD多個模塊的標定。因此,集成標定工位需要根據各個模塊的標定條件,并行或串行進行標定。
集成標定工位的標定條件分為三個部分:車輛位置姿態、模塊狀態,設備狀態和環境狀態。
在駕駛輔助模塊標定前,需要準確獲取車輛相對于工位設備的位置與姿態。車輛位置姿態,是指車輛在集成工位上所處的位置、對中度,以及車輛懸架高度所表現出來的車身高度、俯仰角等參數。車輛需要在集成工位上進行較為嚴格的對中,需要對車輛四輪的向、向進行探測,并計算車輛的對稱角。而由于每輛車懸架高度的不同,需要特別采用傳感器對車輛前后輪眉高度進行檢測,以此確定車身前后的向高度,并計算車輛的俯仰角。結合標定過程中獲取的模塊相對于設備(標定目標)的位置姿態,就能夠獲取模塊坐標系與車輛坐標系的轉換關系。
車輛狀態,即通過車輛OBD端口,檢測確認需要標定的模塊及其相關模塊的運行狀態,以及車輛的運行狀態。在進行標定之前以及標定過程中,需要實時監控并確認車輛及模塊的狀態是否滿足標定的要求,是否存在故障等。同時,標定的指令以及標定結果的確認也是通過OBD診斷口獲取的。
標定過程中的設備狀態是指設備各部件是否存在故障,各部件是否根據要求移動到了指定位置(包括保持姿態)。在設備的設計過程中,需要設計添加許多的傳感器,用以判斷設備的狀態并進行故障報警或提示。例如,雷達標定板是否到位、HUD標定幕布是否降下、是否有人員或物體遮擋了標定目標等。當設備確認其狀態滿足要求后,才會向模塊發送標定的指令。
同樣的,標定過程中標定目標與車輛間的空間是否有遮擋、是否有強光干擾等周邊環境狀態,也需要通過設計特定的傳感器用以探測,以便消除不利的環境因素對標定結果的影響。比如根據對背景光照的測量,標定目標(如黑白燈箱)應能夠對自身發光強度進行調整,達到明暗邊界清晰的最佳狀態。
3.2 標定工位信息融合的方式
基于以上的集成標定工位條件,需要在標定工位的具體架構中,設計多種傳感器并對信息進行數據分析層的融合或決策層的融合。其中,車輛位置姿態和設備狀態的信息收集,由于其數據融合規則較為固定,因此在數據分析層進行融合。而不同車型的車輛狀態判斷不盡相同,更需要相對柔性的設計,故將車輛狀態直接在決策層加入到總體判斷中。環境狀態由于涉及到周邊工位環境的變化,以及所需判斷的信息較少,同樣將其融合到決策層。
在數據分析層進行的車輛位置姿態特征提取和預融合,可以采用諸如神經網絡算法等具有自適應能力的特征捕捉方法,對車輪的向和向的位置進行提取,形成車輛在工位上的前后、左右,以及相對于工位中心線的偏轉角。
3.3 集成標定工位的設計結構
綜上分析,基于信息融合的ADAS模塊集成標定工位的設計結構見圖2。在信息收集層,通過大量有針對性的傳感器,收集車輛、模塊、設備、環境的狀態,轉換為數據后在數據分析層進行數據預融合處理(車輛與設備狀態)或單獨處理提取特征(模塊與環境狀態)。而后,融合已經進行過預融合以及單獨處理的信息,在決策層進行融合決策,并由決策層下發指令到執行層的伺服、氣缸、機器人等執行機構。
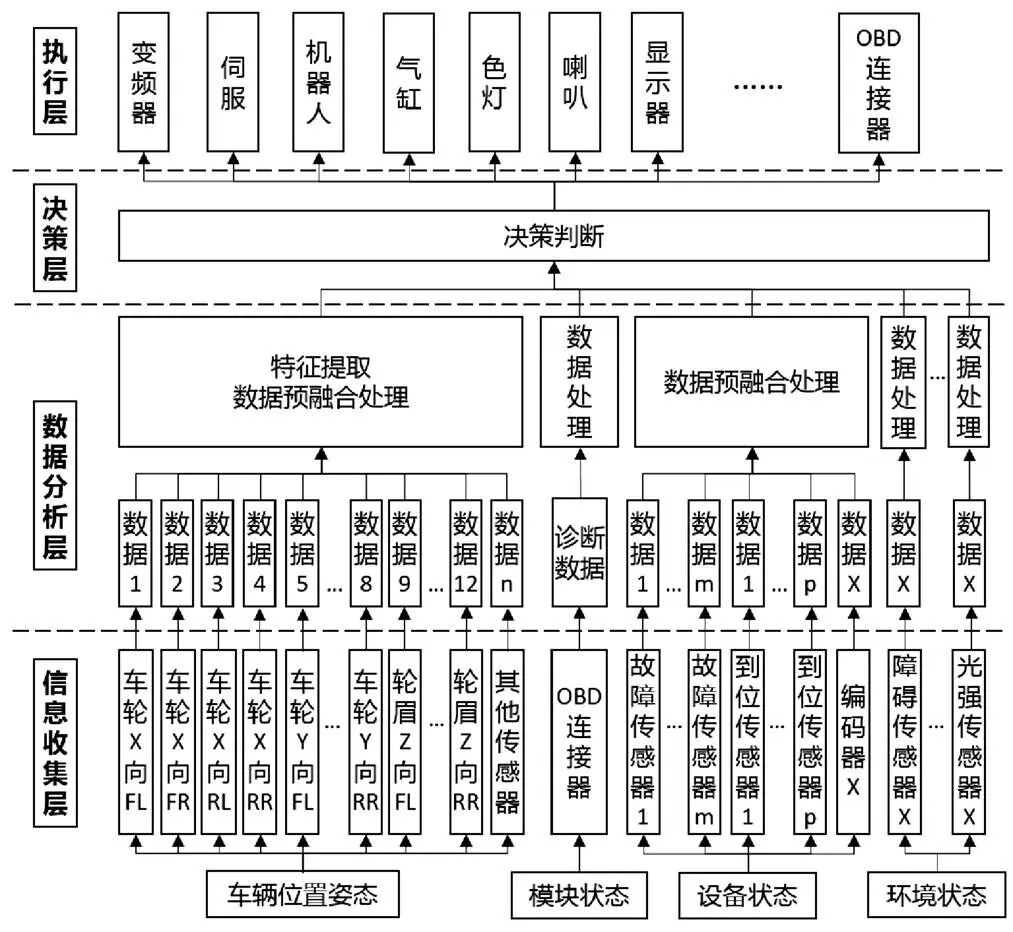
圖2 集成標定工位的設計結構
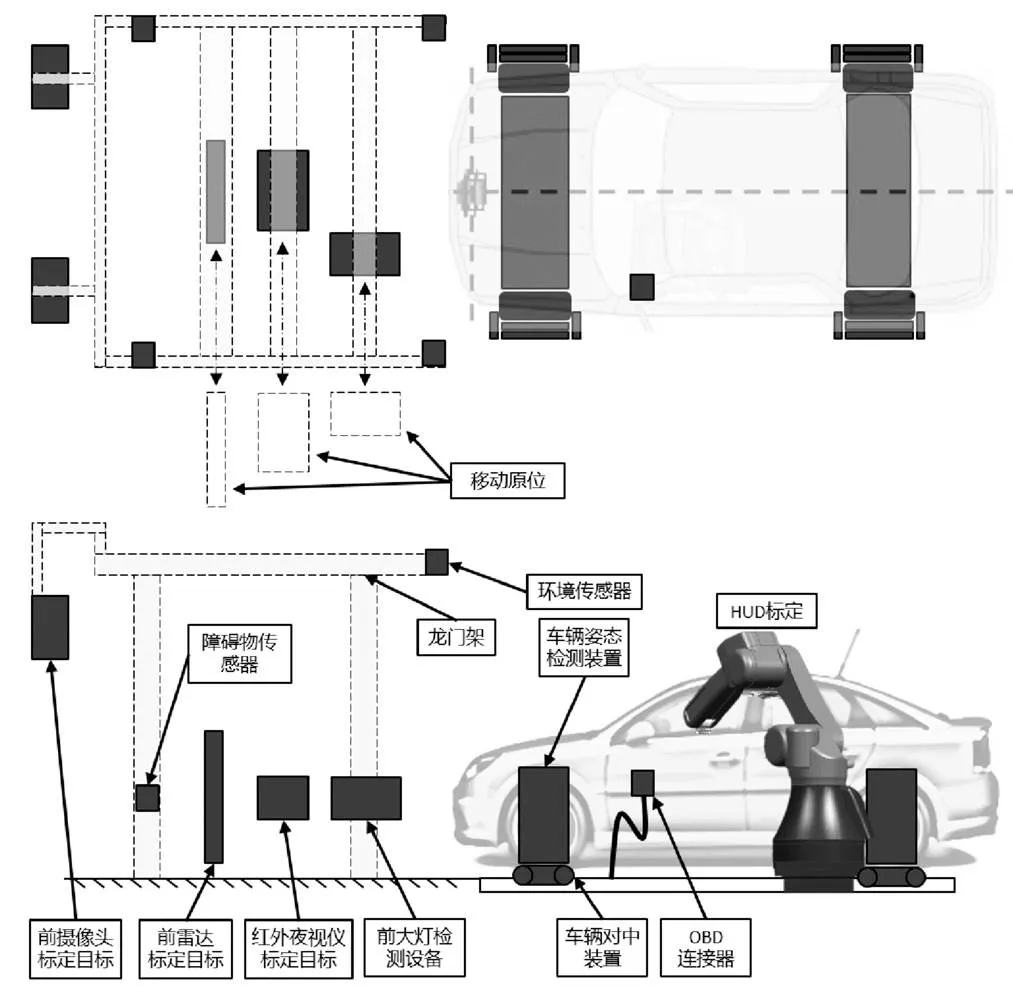
圖3 集成標定工位的示意圖
根據以上的系統設計結構,最終設計形成了如圖3所示駕駛輔助模塊集成標定工位。其中,多種駕駛輔助模塊的標定機構被安裝在車輛前方的龍門架上。對于標定位置阻擋車輛駛出的標定目標,需要設計相應的移動機構。當其處于移動原位時,通過色燈提示操作人員并允許車輛駛出。
4 結論
本文從駕駛輔助模塊及其標定需求入手,結合信息融合技術的理論框架,將駕駛輔助模塊標定集成工位架構分為信息收集層、數據分析層、決策層和執行層,并根據車輛、模塊、設備、環境狀態的特殊性,設計了部分在數據分析層進行預融合的分層融合機制。根據這一設計結構開發的駕駛輔助模塊集成標定工位,能夠準確、快速地進行多模塊串、并行標定工藝,同時對未來可能增加的新模塊標定需求預留了可拓展性。
[1] 張志強.ADAS的發展歷程及趨勢[J].內燃機與配件,2019,(1):80-82.
[2] 于淵,鄭銀香,趙成林,等.車載毫米波雷達目標檢測與定位技術研究[J].移動通信,2019,43(11):21-27+35.
[3] 程金龍,馮瑩,曹毓,等.車載激光雷達外參數的標定方法[J].光電工程,2013,(012):89-94.
[4] 崔洪柳.基于車道線檢測的車載攝像機在線標定算法[D].沈陽:東北大學,2015.
[5] 石永彪,張湧.車載紅外夜視技術發展研究綜述[J].紅外技術,2019, 41(6):504-510.
[6] 安喆,徐熙平,楊進華,等.光學透射式AR-HUD系統的標定方法研究[J].光子學報,2019,48(4):120-131.
[7] 楊世雄.基于信息融合的柴油機熱工故障診斷技術研究[D].大連:大連海事大學,2019.
[8] 袁野.基于多源信息融合的設備關鍵部件狀態評估研究[D].重慶:重慶大學,2018.
[9] 李洋,趙鳴,徐夢瑤,等.多源信息融合技術研究綜述[J].智能計算機與應用,2019,9(5):186-189.
Development of Calibration Station of ADAS Module Based on Information Fusion
TANG Tianyin, GAO Xufeng, WANG Tianjun, LI Feng
( SAIC General Motors Co., Ltd., Shanghai 201206 )
The detection accuracy of ADAS module, as important parts of vehicle ADAS function and even automatic driving, will directly affect the performance and customer satisfaction. Therefore, it is necessary to calibrate the ADAS module in the end of line. In order to meet the different calibration requirements of various modules, as well as the status of vehicle, module, equipment and environment during the calibration process, an integrated station (equipment) is developed which can adapt to the calibration of various ADAS modules in combination with information fusion technology. According to the particularity of the detection information, a hybrid architecture is designed to pre-fuse a part of the data in the data analysis layer, which can complete the calibration of each module quickly and accurately.
ADAS module; Information fusion; End of line calibration; Integration station
U495
A
1671-7988(2021)24-34-04
U495
A
1671-7988(2021)24-34-04
10.16638/j.cnki.1671-7988.2021.024.008
湯天殷,工學碩士,現任上汽通用汽車整車制造工程部終檢線技術經理,主要負責新產品、工廠項目終檢線工藝、設備開發和研究工作。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
