外轉子交替極伺服永磁電機低轉矩脈動設計與綜合優化
2022-01-19 04:54:32梁泳濤賈少鋒梁得亮
導航與控制 2021年5期
梁泳濤,賈少鋒,梁得亮
(西安交通大學電力設備電氣絕緣國家重點實驗室,西安 710049)
0 引言
伺服系統用于精確、連續地控制被控對象的轉角或位移,在機械制造、軍事應用等領域有著廣泛的應用。永磁電機由于其結構簡單、轉矩脈動小等優勢,已經成為伺服驅動的主要發展方向[1]。同時,由于稀土永磁材料性能優異,采用釹鐵硼等稀土永磁的永磁電機具有高效率、高功率密度的優點,在伺服系統等領域得到了廣泛應用[2]。但是,由于近年來稀土開采相關保護政策的實施,導致稀土價格上漲。因此,許多學者開展了關于 “少稀土電機” 的研究[3-4]。交替極永磁(Consequent-pole Permanent Magnet, CPPM)電機相較于常規永磁電機僅有一半的永磁體數量,其能夠大幅提高永磁體的利用率,減少永磁體用量。因此,交替極結構在橫向磁通永磁電機[5]、磁通反向永磁電機[6]、表貼永磁電機[7-8]、永磁游標電機[9]等電機中得到了廣泛應用。
在伺服驅動系統中,電機的轉矩脈動會對電機的伺服控制性能和控制精度產生很大的影響,是其最關注的性能指標之一。從電機本體考慮,目前針對永磁電機的轉矩脈動可以采用斜槽、開輔助槽、磁極形狀優化、極弧系數組合等方式進行優化[10]。交替極電機由于存在不對稱氣隙磁場[11],將對交替極電機的齒槽轉矩[12]、反電勢波形和電磁轉矩脈動[13]造成影響,使得交替極電機的轉矩脈動相較常規永磁電機更顯著。文獻[14]對不同槽極配合下交替極電機的齒槽轉矩和轉矩脈動進行了研究。文獻[15]和文獻[16]提出了N-S-鐵-S-N-鐵和Spoke-面貼式混合極新型轉子結構,以消除氣隙磁密偶次諧波導致的電磁轉矩脈動。總的來說,目前國內外學者針對CPPM電機的轉矩脈動抑制研究仍然有限[17]。因此,對CPPM電機進行轉矩脈動綜合優化具有重要意義。
本文首先對CPPM電機轉矩脈動的產生原因與優化機理進行分析,通過槽極數配合、優化極弧系數、永磁體不等極弧系數與定子齒偏心等方法對外轉子交替極伺服電機轉矩脈動進行綜合優化設計,隨后運用有限元軟件對電機進行仿真分析,仿真結果驗證了優化方法的有效性,最后制作了樣機。
1 CPPM電機轉矩脈動的產生機理
對于永磁同步電機來說,轉矩脈動主要由齒槽轉矩和紋波轉矩兩部分組成。其中,齒槽轉矩由齒槽效應引起,永磁體產生的磁場與電樞鐵芯的齒槽相互作用,使得電機轉子和定子有沿某一方向對齊的趨勢;而紋波轉矩主要由電機電流的時間諧波和氣隙磁密的空間諧波造成,電機繞組分布的不正弦、電機電樞反應的影響、逆變器元件性能等因素都會使電機電流和反電勢波形畸變,導致電機的轉矩脈動[18]。
CPPM電機通過將傳統永磁電機中所有N極(或S極)用鐵芯代替,構成鐵芯凸極與永磁體交替出現的結構,其鐵芯凸極受到永磁體磁化呈現出與永磁體相反的極性。CPPM電機轉矩產生的機理與傳統永磁電機相同,因此轉矩脈動產生的原因也與傳統永磁電機類似。但是對于CPPM電機而言,由于其結構的特殊性,電機的齒槽轉矩相比相同槽極配合的傳統永磁電機更加明顯。除此之外,一些分數槽電機會因CPPM電機轉子結構導致氣隙磁密不平衡,使得反電勢存在偶次諧波,增加了電機的轉矩脈動[10]。
2 CPPM電機轉矩脈動的優化機理
2.1 永磁體不等極弧系數優化機理
在不考慮磁路飽和、電機鐵芯的磁導率為無窮大、永磁體與空氣的磁導率相同、永磁體中的磁場能量保持不變等理想條件下,通過能量法可以計算出CPPM電機的齒槽轉矩表達式

式(1)中,LFe為電機軸向長度, R1和R2分別為轉子內徑和定子外徑,n為使得nZ/2p為整數的最小整數[10]。
由式(1)可知, BrnZ/2p和 Gn為影響齒槽轉矩的主要因素。齒槽轉矩的削弱可以從減小氣隙磁導、永磁體剩磁磁密的諧波次數和幅值的角度入手。
采用永磁體不等極弧系數設計的CPPM電機轉子結構如圖1所示,永磁體不等極弧CPPM電機樣機部件如圖2所示。由圖1可知,電機轉子中不同寬度的永磁體交替分布,PM1和PM3的極弧系數為αpm1,PM2和PM4的極弧系數為αpm2,鐵芯凸極的極弧系數為αi。

圖1 非對稱磁極交替極外轉子拓撲結構Fig.1 Topology of the CPPM motor outer rotor with asymmetrical PM poles
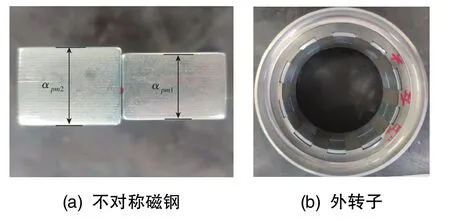
圖2 采用永磁體不等極弧設計的CPPM電機樣機部件Fig.2 Prototyping components of CPPM motor with asymmetrical PM poles
永磁體不等極弧CPPM電機的氣隙磁密如圖3所示,Brm為永磁體所對應的氣隙磁密幅值,Bri為鐵芯對應的氣隙磁密幅值。

圖3 非對稱磁極CPPM電機的氣隙磁密分布Fig.3 Air-gap flux density of CPPM motor with asymmetrical PM poles
為了計算永磁體不等極弧CPPM電機的齒槽轉矩,對CPPM電機氣隙磁密的平方進行Fourier展開,并求取Fourier系數Brh[17]
對比式(1), 只有 h=nZ/2p(n=1, 2, 3, …)次Fourier分解系數才對齒槽轉矩起作用。因此,合理選擇CPPM電機不等極弧系數設計中的參數αpm1、 αpm2與αpi, 可減小氣隙磁密中的nZ/2p次諧波,從而減小電機齒槽轉矩,實現CPPM電機轉矩脈動的優化。
2.2 定子齒偏心結構優化機理
圖4為定子齒偏心結構的示意圖,h為定子齒偏心距,當采用偏心結構后,定子齒頂圓弧所對應的圓心由原先的O點向上移動h距離到了O′點處。定子齒偏心結構通過優化定子鐵芯外表面極弧形狀從而達到減小氣隙磁密諧波含量、抑制電機轉矩波動的目的,圖5為采用定子齒偏心結構的CPPM樣機定子示意圖。
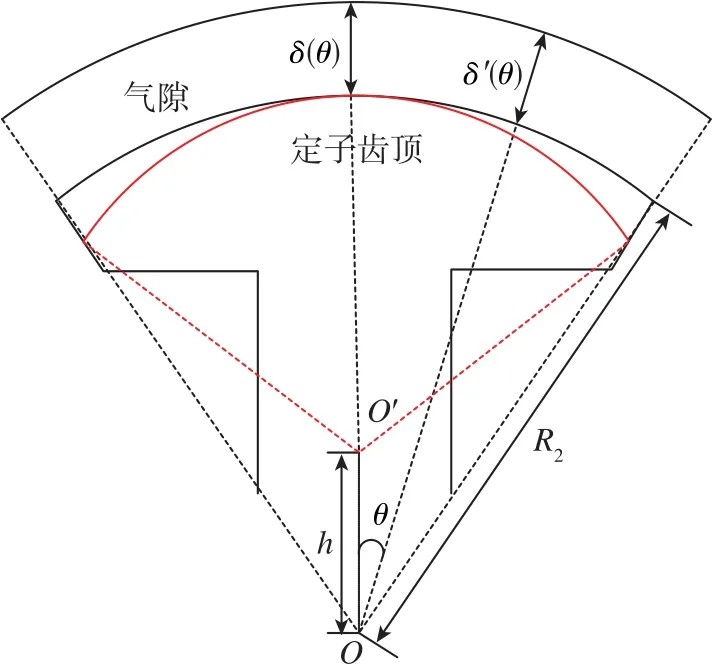
圖4 定子齒偏心結構示意圖Fig.4 Schematic diagram of stator tooth eccentric structure
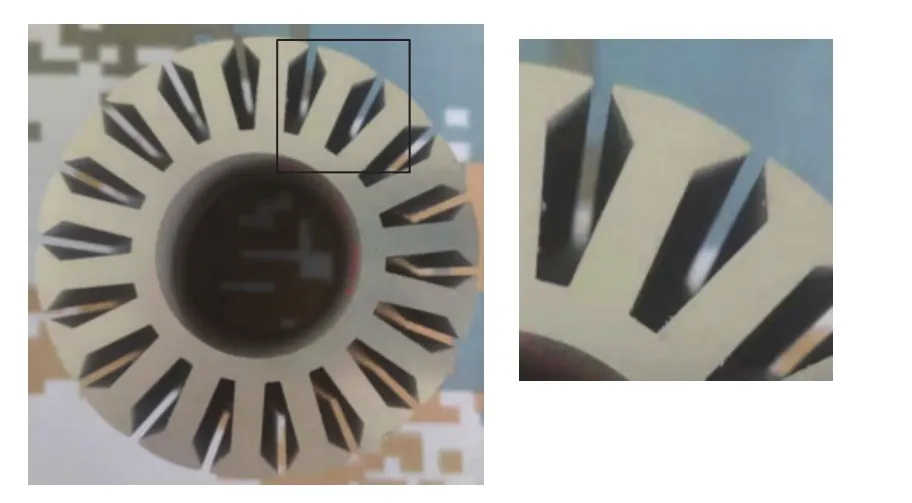
圖5 定子齒偏心結構的CPPM樣機定子Fig.5 Schematic diagram of CPPM motor stator with stator tooth eccentric structure
傳統電機的氣隙磁密分布表達式為

式(3)中, hm為永磁體充磁方向長度, Br(θ)、δ(θ,α)分別為永磁體剩磁、有效氣隙長度沿圓周方向的分布。
定子齒偏心結構電機的氣隙磁密分布表達式為
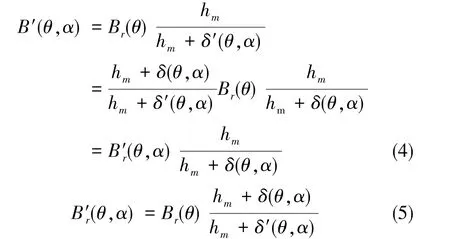
通過數學變換, 只需將 B′r(θ, α)的平方進行Fourier展開,求出相應的Fourier系數,就可以代入齒槽轉矩的計算公式中進行計算。
通過圖4可求出定子齒頂對應的氣隙長度,其表達式為
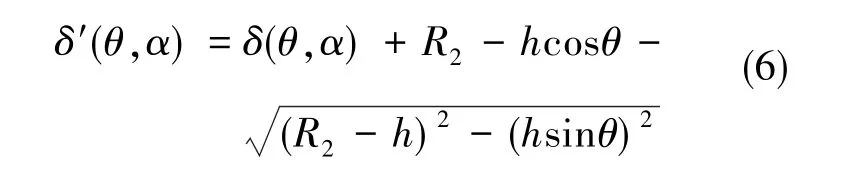
將式(6)代入式(5)中,可以得到永磁體剩磁磁密平方的表達式[19]
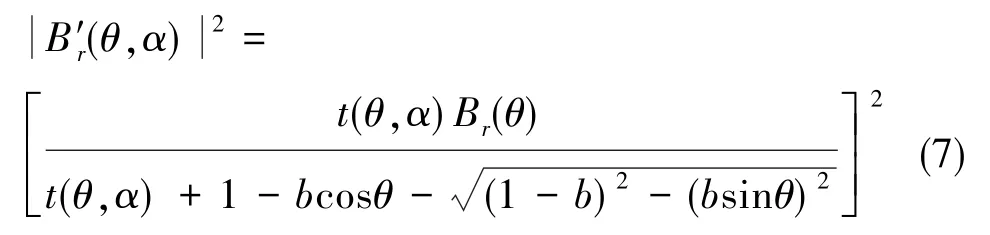
式(7)中,t(θ,α)=[hm+δ(θ,α)]/R2,b=h/R2。
3 仿真模型的建立
實際情況下,CPPM電機的氣隙結構較為復雜,且上述優化方法的理論分析是在一定的理想條件下進行的,因此需要運用有限元方法對電機性能做進一步的分析。
本文中的交替極永磁電機的設計要求為300r/min、63W,考慮到電機槽極配合對轉矩脈動的影響,電機的槽數與極數的公倍數越大,電機的齒槽轉矩就越小。本文電機的槽極數選用18槽20極,繞組采用雙層分布式集中繞組。為了研究優化極弧系數、永磁體不等極弧、定子齒不等寬等方法對CPPM電機轉矩脈動優化的效果,使用有限元軟件建立了4種電機模型,如圖6所示。圖6(a)為18槽20極傳統表貼式永磁(SPM)電機,圖6(b)為18槽20極的CPPM電機,圖6(c)中的CPPM-1電機采用了永磁體不等極弧的設計,圖6(d)中的CPPM-2電機同時采用了永磁體不等極弧以及定子齒偏心的設計。4種不同電機的定轉子內外徑、氣隙長度、疊片長度等參數相同,電機定轉子均采用牌號為DW310-35的硅鋼片,磁鋼材料牌號為N35的永磁體,電機的主要參數如表1所示。
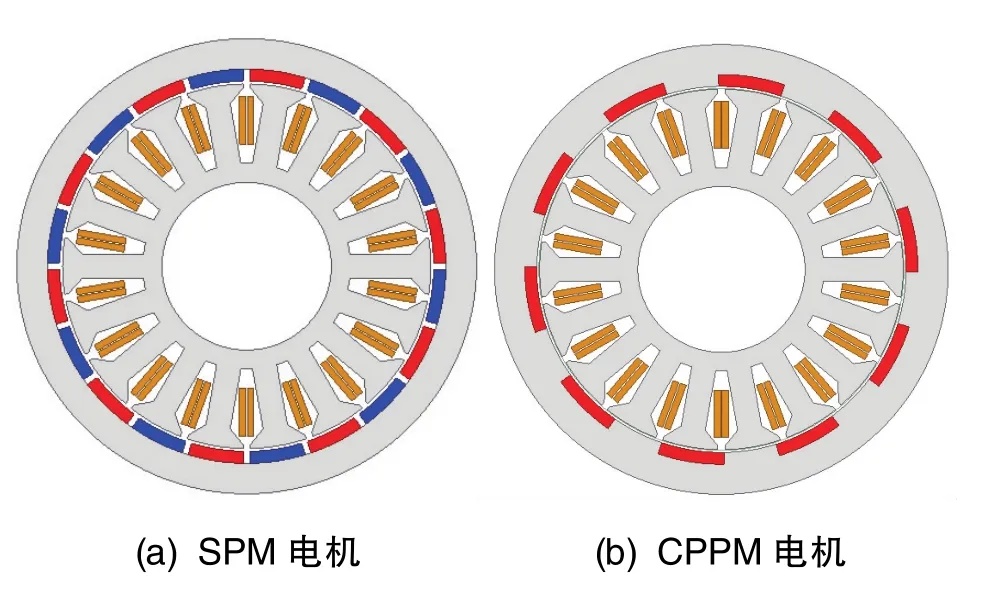
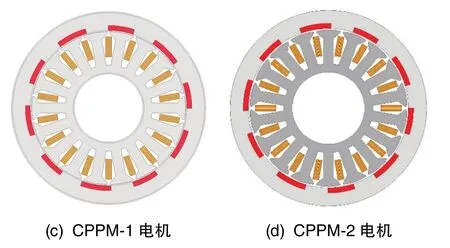
圖6 18槽20極永磁電機不同結構的截面圖Fig.6 Cross section of 18-slot/20-pole machines with different structures
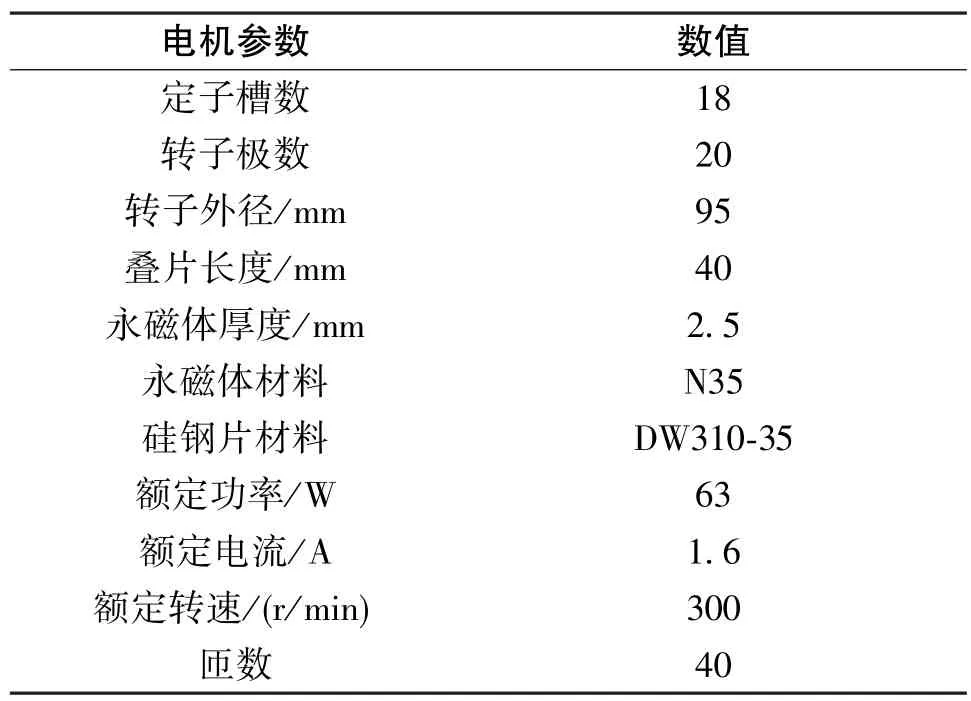
表1 18槽20極電機主要設計參數Table 1 Main design parameters of 18-slot/20-pole machines
4 電機轉矩脈動的優化
本文使用Ansys Maxwell軟件進行有限元分析,電機采用id=0的控制策略,不同的電機模型均通入相同的電流。
4.1 永磁體極弧系數的優化
極弧系數是影響永磁電機齒槽轉矩的重要因素之一,合理地選擇電機永磁體極弧系數能夠降低電機的齒槽轉矩和轉矩脈動。在電機其他參數不變的情況下,SPM電機與CPPM電機的平均轉矩和轉矩脈動隨著永磁體極弧系數的變化關系如圖7所示。在計算SPM電機極弧系數αspm與CPPM電機極弧系數αcppm的過程中,二者對應的極距所跨弧度均為π/10。由圖7可知,αspm在0.80~0.99變化時,SPM電機的平均轉矩隨著αspm的增加而增加,αspm=0.93時, 電機轉矩脈動最小, 為2.17%;αcppm在1.00~1.20變化時,CPPM電機的平均轉矩同樣隨著αcppm的增加而增加,當αcppm=1.09時,電機轉矩脈動最小,為6.29%。
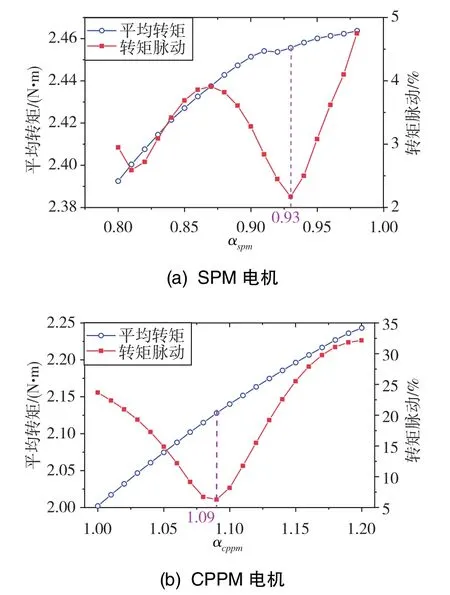
圖7 SPM電機與CPPM電機平均轉矩和轉矩脈動隨永磁體極弧系數的變化關系Fig.7 Variations of average torque and torque ripple withαspmandαcppmfor SPM motor and CPPM motor
選取αspm=0.93與αcppm=1.09, 對SPM電機與CPPM電機的性能作進一步分析。
SPM電機與CPPM電機的負載磁密分布如圖8所示。由圖8可知,CPPM電機永磁體與硅鋼片相互接觸的部分漏磁較為明顯。同時,在選取αspm=0.93與αcppm=1.09的情況下,CPPM電機的永磁體用量僅為SPM電機的59.6%,CPPM定子齒部的磁密比SPM電機低。圖9展示了SPM電機與CPPM電機空載氣隙磁密的波形與FFT結果,二者空載氣隙磁密所含主要諧波均為奇次諧波,SPM電機空載氣隙磁密基波幅值要大于CPPM電機,且空載氣隙磁密的畸變更小。電機空載反電勢波形和FFT對比如圖10所示。由圖10可知,SPM電機的空載相反電勢基波幅值大于CPPM電機,分別為22.9V與20.0V。同時,SPM電機的相反電勢的畸變更小。從以上仿真結果可以推測,相較于SPM電機,CPPM電機氣隙磁密和反電勢波形的畸變更大,會導致其出現較大的轉矩脈動。
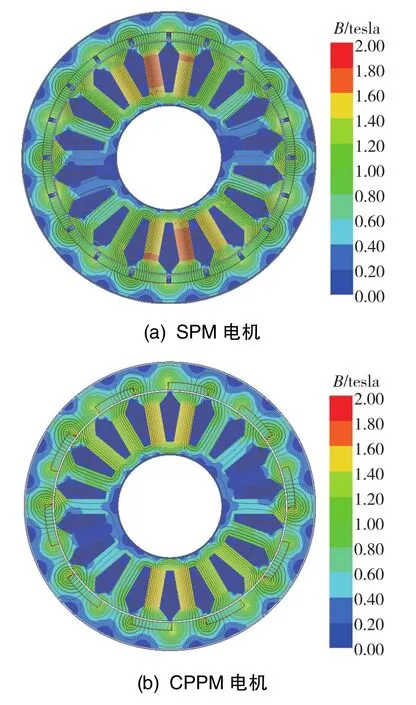
圖8 SPM電機與CPPM電機的負載磁密分布Fig.8 Load flux distribution of SPM motor and CPPM motor
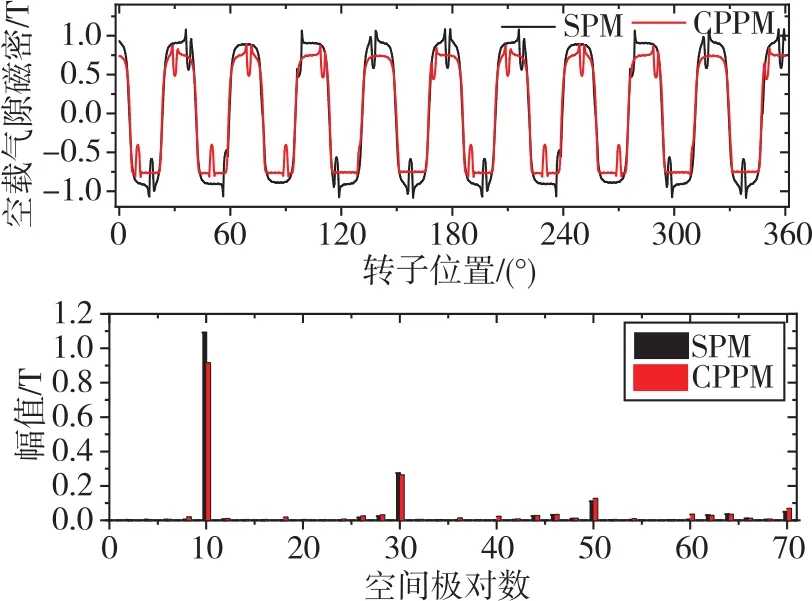
圖9 SPM電機與CPPM電機空載氣隙磁密波形及FFT分析對比Fig.9 Analysis and comparison of the open circuit air-gap flux density waveform and FFT between SPM motor and CPPM motor
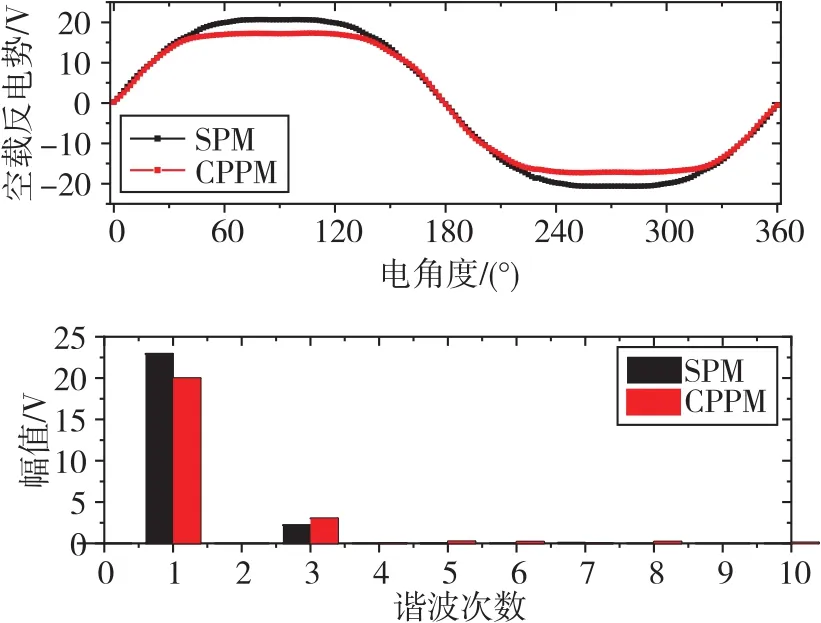
圖10 SPM電機與CPPM電機空載反電勢波形及FFT分析對比Fig.10 Analysis and comparison of the back-EMF waveform and FFT between SPM motor and CPPM motor at open circuit condition
圖11和圖12分別為SPM電機與CPPM電機的齒槽轉矩和轉矩的波形對比。可以看到,SPM電機與CPPM電機的齒槽轉矩峰峰值分別為17.0mN·m、98.6mN·m。經計算,兩個電機的平均轉矩和轉矩脈動分別為2.46N·m、2.13N·m和2.17%、6.29%。相較于SPM電機,CPPM電機的齒槽轉矩諧波次數更小,齒槽轉矩更明顯,轉矩脈動也更嚴重。
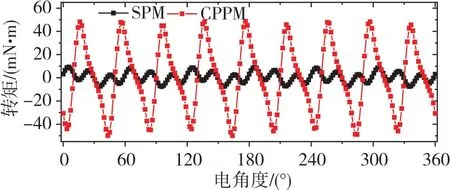
圖11 SPM電機與CPPM電機的齒槽轉矩波形對比Fig.11 Comparison of cogging torque waveform between SPM motor and CPPM motor

圖12 SPM電機與CPPM電機的轉矩波形對比Fig.12 Comparison of torque waveform between SPM motor and CPPM motor
通過以上對比可以得出,相較于SPM電機,CPPM電機僅使用了59.6%的永磁體,卻產生了86.6%的轉矩,證明了CPPM電機能夠節約永磁體用量。但是另一方面,CPPM電機轉矩脈動相較SPM電機明顯增大。通過永磁體極弧系數優化的方法,使得CPPM電機的轉矩脈動有所改善,但仍需進一步優化。
4.2 永磁體不等極弧系數
通過第2章中的推導可知,采用永磁體不等極弧的方式可以進一步優化CPPM電機的轉矩脈動,建立的有限元模型如圖6(c)所示。CPPM-1電機中磁鋼極弧系數分別為αpm1、αpm2, 相鄰大小不等的磁鋼交替排列。在電機其他參數不變的情況下,圖13給出了αpm1與αpm2不同取值時CPPM-1電機平均轉矩和轉矩脈動的變化情況。由圖13(a)可知,從左下角到右上角,CPPM-1電機的平均轉矩隨著永磁體極弧系數的上升而增加。圖13(b)反映了存在多個不同的不等極弧系數組合可以使得CPPM-1電機轉矩脈動較低。綜合考慮電機永磁體用量、平均轉矩和轉矩脈動情況,使電機在較少永磁體用量的情況下輸出較高的轉矩,且轉矩脈動較低,最終選取CPPM-1電機的永磁體極弧系數為 αpm1=1.02與 αpm2=1.20。
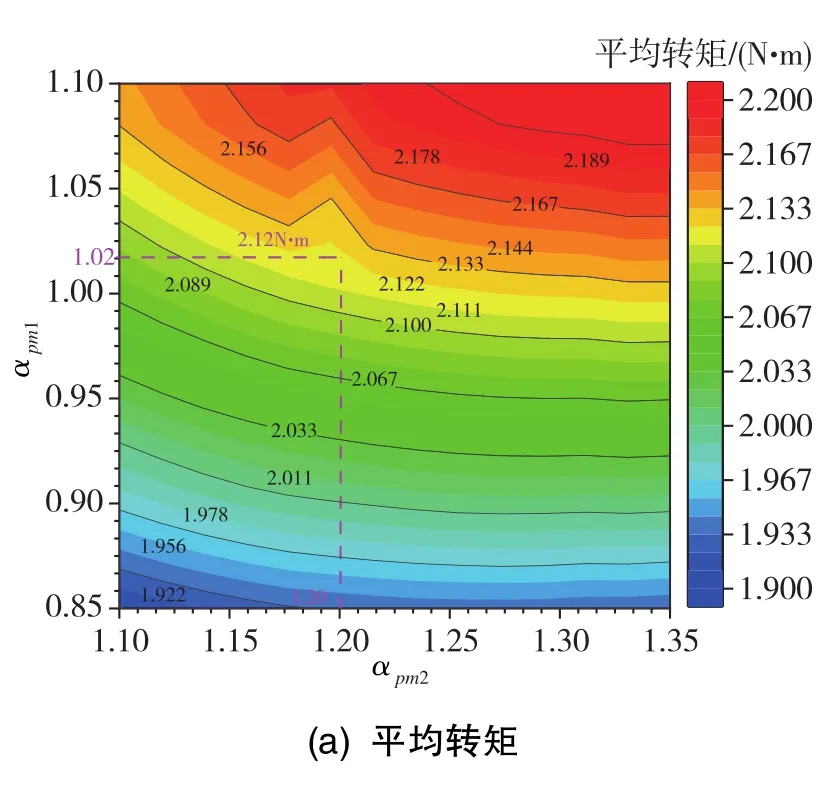

圖13 αpm1與αpm2變化對CPPM-1平均轉矩和轉矩脈動的影響Fig.13 Variations of average torque and torque ripple withαpm1andαpm2for CPPM-1
對αpm1=1.02與αpm2=1.20配合下CPPM-1電機的性能做進一步分析,并將其與CPPM電機性能對比。CPPM電機與CPPM-1電機空載氣隙磁密波形和FFT對比如圖14所示,電機空載反電勢波形和FFT對比如圖15所示。
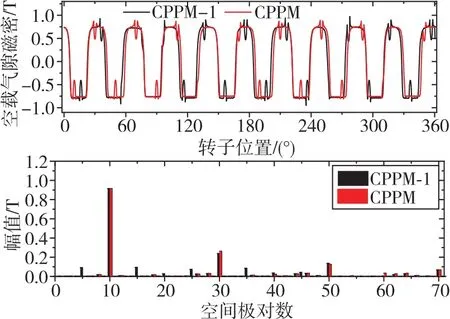
圖14 CPPM電機與CPPM-1電機空載氣隙磁密波形及FFT分析對比Fig.14 Analysis and comparison of the open circuit air-gap flux density waveform and FFT between CPPM motor and CPPM-1 motor
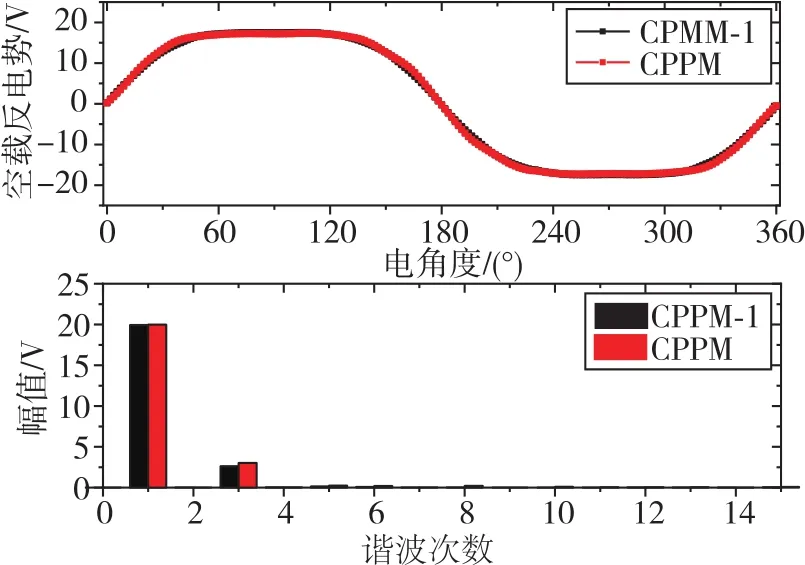
圖15 CPPM電機與CPPM-1電機空載反電勢波形及FFT分析對比Fig.15 Analysis and comparison of the back-EMF waveform and FFT between CPPM motor and CPPM-1 motor at open circuit condition
如圖14所示,相較于CPPM電機,CPPM-1電機氣隙磁密的基波幅值基本不變,3次諧波含量略有降低。此外,由于CPPM-1電機采用了大小各5塊磁鋼交替分布的轉子結構,其氣隙磁密會在空間中分解出5對極及5對極倍數的磁密,但是并不會在繞組中感應出相應次數的反電勢。圖15為兩電機的反電勢對比,可以看出,二者的反電勢基波幅值基本相同,相較于CPPM電機,CPPM-1電機反電勢的3、6、8次諧波含量減少。
為了驗證永磁體不等極弧方法的優化效果,圖16和圖17分別給出了CPPM-1電機的齒槽轉矩和轉矩波形(藍色曲線)。可以看出,CPPM-1電機的齒槽轉矩峰峰值為24.1mN·m。經計算,CPPM-1電機的平均轉矩和轉矩脈動為2.12N·m、3.97%。相較于CPPM電機,在平均轉矩變化不大的基礎上,CPPM-1電機的齒槽轉矩和轉矩脈動均得到了明顯的改善。
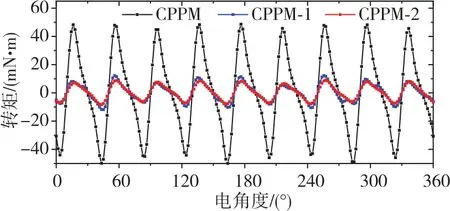
圖16 CPPM電機、CPPM-1電機和CPPM-2電機的齒槽轉矩波形對比Fig.16 Comparison of cogging torque waveform among CPPM motor,CPPM-1 motor and CPPM-2 motor
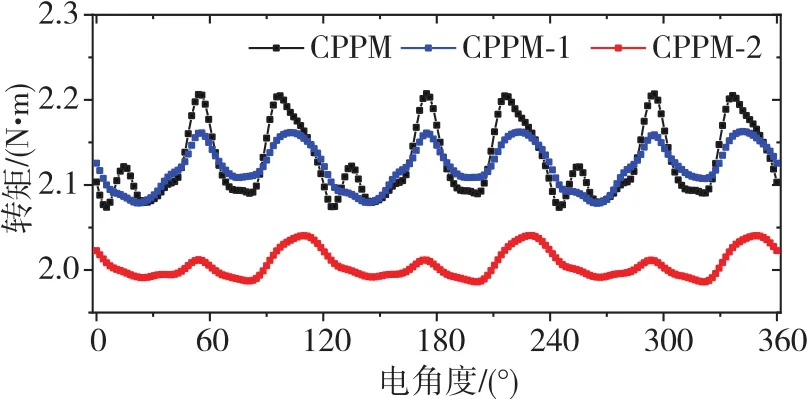
圖17 CPPM電機、CPPM-1電機和CPPM-2電機的轉矩波形對比Fig.17 Comparison of torque waveform among CPPM motor,CPPM-1 motor and CPPM-2 motor
4.3 定制齒偏心
為進一步降低電機的轉矩脈動,CPPM-2電機采用了定子齒偏心結構,電機的截面圖如圖6(d)所示。在電機其他參數不變的情況下,圖18給出了CPPM-2電機平均轉矩和轉矩脈動隨著定子齒偏心距h的變化關系。可以看出,隨著h在1mm~23mm內增加,CPPM-2電機的平均轉矩逐漸減小,轉矩脈動先增大后減小。當h=16mm時,轉矩脈動達到最小值,此時的平均轉矩和轉矩脈動為2.01N·m、 2.76%。
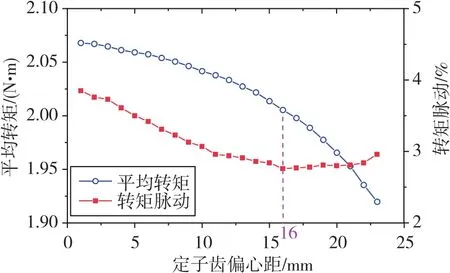
圖18 CPPM-2電機的平均轉矩和轉矩脈動隨定子齒偏心距的變化Fig.18 Variations of average torque and torque ripple with h for CPPM-2
當偏心距h=16mm時,對CPPM-2電機的其他電磁性能進行進一步仿真。CPPM-1電機與CPPM-2電機的負載磁密分布如圖19所示。可以看到,定子齒偏心結構會對電機磁力線的分布造成一定的影響。由于偏心結構導致定子齒邊緣附近的磁阻增大,少量磁力線會經過氣隙穿過相鄰定子齒。同時,定子齒邊緣氣隙增大也會使得磁力線流經路徑變長,氣隙處的磁壓降增加,影響齒部磁通量,所以CPPM-2電機齒身部的磁密要小于CPPM-1電機。在圖20所示的CPPM-1電機與CPPM-2電機空載氣隙磁密波形及FFT分析對比圖中可以進一步驗證偏心結構對電機的影響。CPPM-2電機與CPPM-1電機的氣隙磁密諧波次數基本一致,但是CPPM-2電機的氣隙磁密基波以及3、5、7次諧波幅值要明顯低于CPPM-1電機。可以推測CPPM-2電機的平均轉矩要低于CPPM-1電機,但由于氣隙磁密諧波含量的減少,其轉矩脈動也會有所降低。圖21為CPPM-1電機與CPPM-2電機空載反電勢波形和FFT對比圖。由于電機空載反電勢是相應次數的氣隙磁密在繞組中感應得到,因此圖21的規律與圖20基本一致。對比CPPM-1電機,CPPM-2電機反電勢基波與3、5次諧波均有所減少。
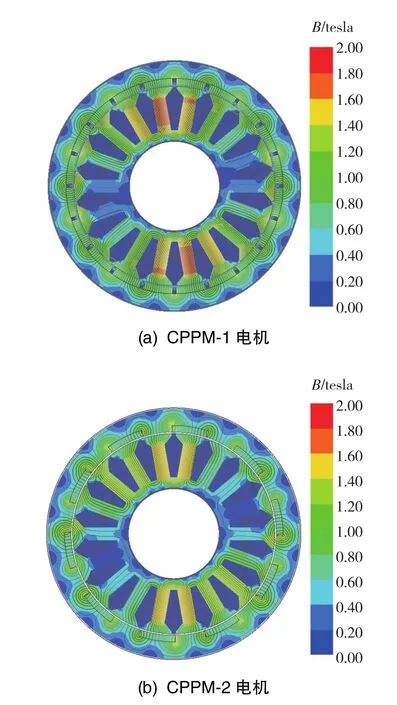
圖19 CPPM-1電機與CPPM-2電機的負載磁密分布Fig.19 Load flux distribution of CPPM-1 motor and CPPM-2 motor
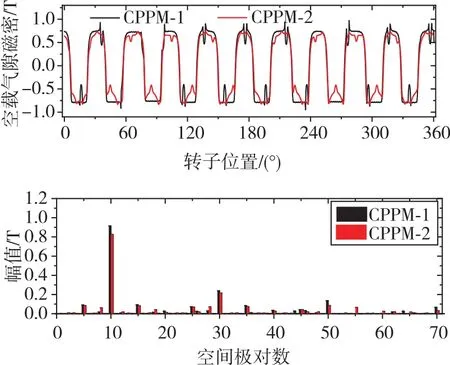
圖20 CPPM-1電機與CPPM-2電機空載氣隙磁密波形及FFT分析對比Fig.20 Analysis and comparison of the open circuit air-gap flux density waveform and FFT between CPPM-1 motor and CPPM-2 motor
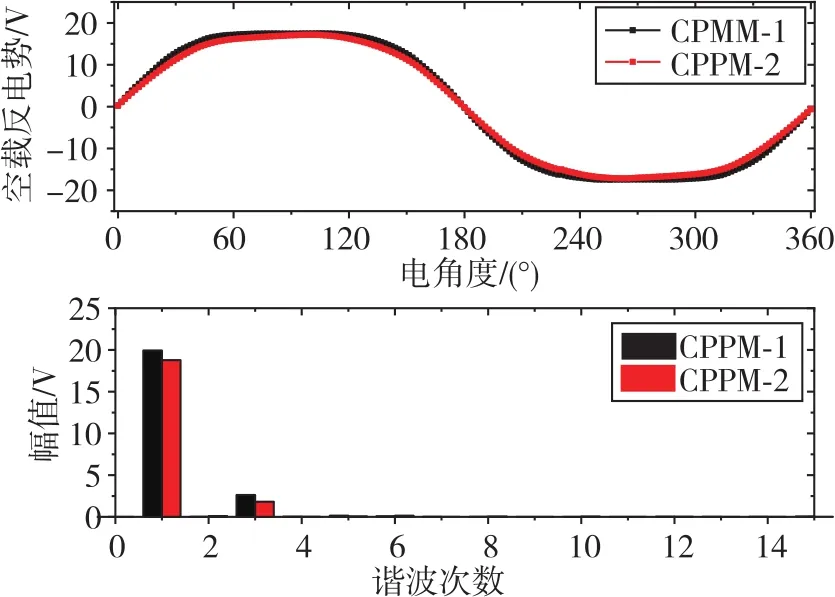
圖21 CPPM-1電機與CPPM-2電機空載反電勢波形及FFT分析對比Fig.21 Analysis and comparison of the back-EMF waveform and FFT between CPPM-1 motor and CPPM-2 motor at open circuit condition
為了驗證定子齒不等寬對電機轉矩脈動的優化效果,圖16和圖17分別給出了CPPM-2電機的齒槽轉矩和轉矩波形(紅色曲線)。可以看出,CPPM-2電機的齒槽轉矩峰峰值為17.4m·Nm。經計算,CPPM-2電機的平均轉矩和轉矩脈動為2.01N·m、2.76%。相較于CPPM-1電機,CPPM-2電機在平均轉矩僅下降5.2%的情況下,轉矩脈動減少了30.5%,優化效果較為明顯。
5 結論
本文首先對CPPM電機轉矩脈動的產生機理進行分析,總結出能有效削弱轉矩脈動的方法,并利用有限元仿真軟件對采用不同優化方法的CPPM電機進行仿真分析。仿真結果表明,通過采用優化永磁體極弧系數、永磁體不等極弧配合與定子齒偏心結構的方法,能夠有效削弱CPPM電機的轉矩脈動。本文為CPPM電機的轉矩脈動抑制提供了一定的理論基礎和技術借鑒,為CPPM電機在伺服系統中的推廣應用提供了一定的參考。