考慮無功裕度的受端電網暫態電壓穩定性控制方法研究
2022-01-23 04:20:40張運厚柳順楠劉繼成任普春關皓聞
可再生能源 2022年1期
關鍵詞:系統
張運厚,柳順楠,劉繼成,任普春,關皓聞
(1.國家電網公司東北分部,遼寧沈陽 110002;2.北京科東電力控制系統有限責任公司,北京 100192;3.華北電力大學,北京 102206)
0 引言
近年來,隨著我國電力系統規模的不斷擴大和可再生能源、多源儲能、多能源轉換等接入容量的快速增加,遠距離大容量輸電系統的功率平衡問題日趨復雜[1]。多能源接入與大規模跨區域外送,使電網在經歷大擾動時,電壓穩定控制變得更加困難[2]。
國內外學者針對電網暫態控制過程進行了大量研究。文獻[3],[4]進行了系統安穩控制策略研究,探討了基于暫態過程能量平衡控制的離線決策控制方法和在線預決策控制方法;兩者的策略表生成方式分別通過離線手動計算和計算機在線計算。文獻[5],[6]采用穩定性能指標作為暫態能量控制約束條件;通過反向積分計算得到當前故障的線性不等式;通過迭代計算得到最優機組功率控制策略。文獻[7]將故障切除時刻的發電機的轉子角速度和動能作為暫態能量平衡控制策略優化的關鍵數據,進行電網下一時段的穩定控制。文獻[8]綜合系統拓撲和暫態功率控制前后發電機同步系數進行動態網絡同步,通過電力系統線性和非線性模型確定最優功率控制策略,得到系統的切機量。文獻[9]基于轉子運動方程,分析電力系統在正常工況下、故障切除時刻和采取機組功率控制時刻的運行特性,提出一種求取最小功率控制切機量的方法。
電壓穩定裕度(VSM)的大小與無功容量正相關。文獻[10]提出了一種考慮可信度的可再生能源出力方法。該方法將能量裕度要求作為一個非線性優化問題,進行系統能量平衡優化控制,采用Bender分解法進行模型求解。文獻[11]以最大限度地增加無功備用容量及降低系統無功損耗為目標,采用了一種雙目標優化控制方法。該方法采用基于最優潮流和Bender分解的非線性優化框架來確定系統最優運行條件。文獻[12]引入了基于無功儲備約束的最優潮流概念,利用最優潮流框架確定在各種工況和運行條件下,提高電壓穩定裕度所需的最小無功電源數量。文獻[13]以最大限度地提高電壓穩定裕度為目標,實現了系統成本和電壓穩定裕度的多目標優化。以上研究主要針對電力系統暫態過程控制,通過控制機組的出力以及相應的無功電源,實現系統有功、無功穩定。但是,目前對于跨區域受端電網的暫態穩定控制研究較少,并未涉及相關電壓穩定裕度控制的研究。為解決受端電網暫態電壓穩定性問題,對受端系統電壓穩定實現精確控制,本文通過分析受端系統暫態電壓穩定性條件,結合系統無功裕度計算方法,通過建模得到受端系統的電壓穩定性曲線;通過電壓穩定預測方法進行優化學習,判斷受端系統電壓的穩定性。
1 無功裕度與電壓穩定性分析
受端電網的無功裕度計算式[14]:

式中:X=[x1,x2,…,xm-1,xm]T,x1,x2,…,xm-1,xm為描述電力系統當前狀態的m個狀態變量,為電力系統所有節點各自的電壓幅值、相角、有功功率、無功功率。
2 系統最大無功裕度優化
在跨區域電力系統中,受端系統電壓穩定性受系統無功補償及無功電源容量的影響。由于無功功率很難通過外送系統獲得,因此為保證受端系統的電壓穩定性,必須保證受端系統裝有足夠的無功電源及無功補償裝置。受端系統無功裕度是指系統電壓能夠在保持穩定范圍內所需的無功支撐。為了使系統電壓有較大的彈性波動范圍,可通過增大系統無功支撐容量使系統無功裕度最大,從而進行電網電壓穩定性的控制。系統無功最大裕度表示為
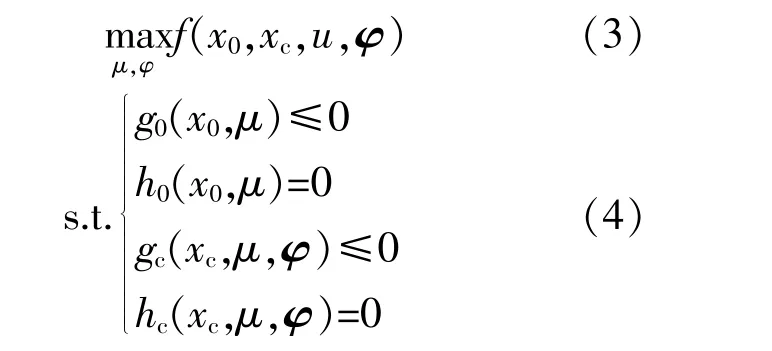
式中:目標函數f(·)為受端系統無功裕度計算函數;μ為控制變量,是由發電機的輸出電壓和輸出無功功率組成的向量;x為控制變量在當前工作點和崩潰點的電壓值;φ為狀態變量向量,即虛擬無功功率注入向量;g(·),h(·)分別為系統不等式約束和等式約束,等式約束條件由系統當前工作點的潮流方程及控制變量構成,不等式約束由機組運行極限、輸電線路節點電壓幅值構成。
無功裕度計算目標是發電機正常運行時與最大無功輸出運行時的差值最小,目標函數由式(5)給出。在工作點和電壓崩潰點受給定等式和不等式約束,如式(6)~(13)所示。
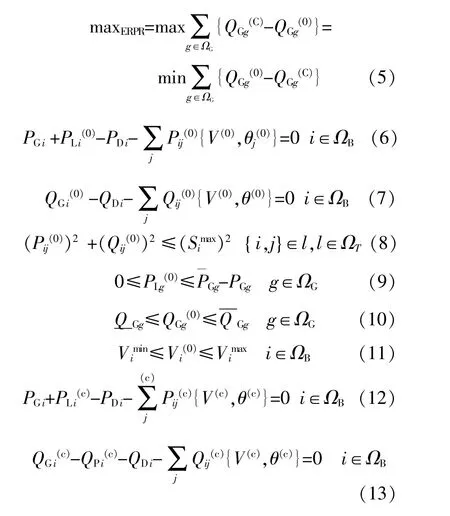
式中:ΩB,ΩT,ΩG分別為母線的集合、線路的集合和發電機的集合;i,j為母線相關參數;l為線路參數;g為發電機參數;Vi為母線i的電壓幅值;θ為連接兩個節點母線之間的電壓角差;P,Q分別為有功功率和無功功率;PGi,PLi,PDi分別為i母線的有功發電量、損耗量和需求量;Pij為各總線ij之間的有功功率流;QGi,QDi為母線內的無功發電量和需求量;Qij為ij母線間的無功流量;QPi為注入第i母線的無功功率矢量。
3 受端電網電壓暫態穩定模型
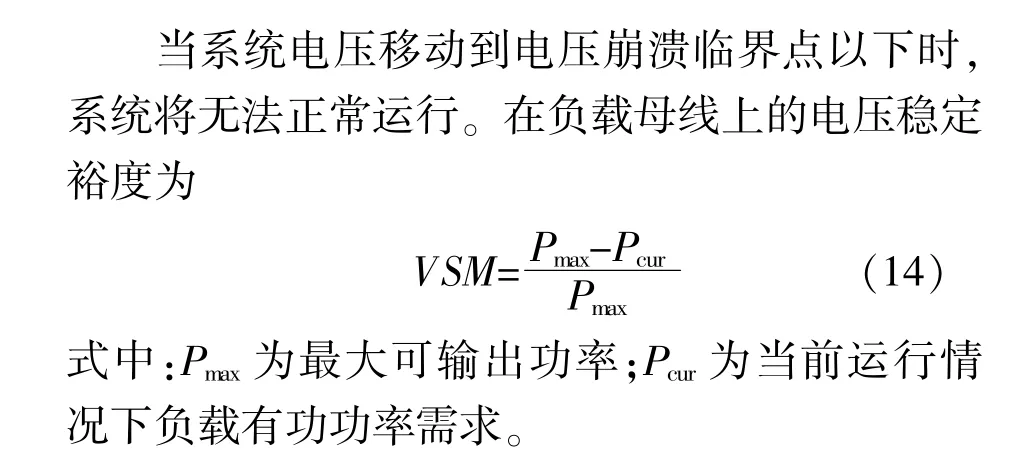
跨區域受端系統電壓穩定性是指送端電力系統中出現功率波動或受端出現擾動后,保持系統中所有母線電壓穩定的能力。本文主要針對在受端系統負荷突然變化的情況下,因系統無功支撐容量不足所進行的電壓穩定性控制。
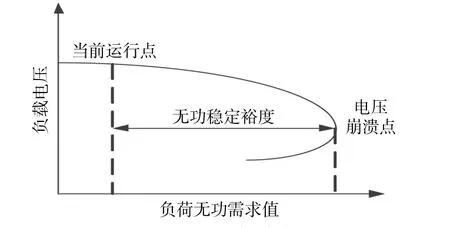
當負載需求功率超過最大可輸出功率時,系統會出現電壓波動。正常情況下,系統電壓位于電壓崩潰臨界點上方,其中受端系統負荷需求與負載母線電壓大小之間的關系如圖1所示。
在進行無功備用(RPR)計算后,利用優化控制方法來增加系統的無功穩定性裕度。首先將無功備用容量和電壓穩定裕度(VSM)提高到安全水平所需的最大值內,電壓穩定裕度取值為0.92~1.05 p.u.。

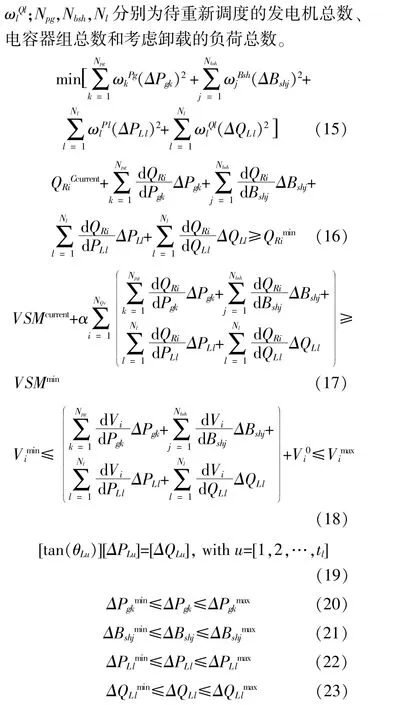
不等式(16)約束保證將關鍵無功備用恢復到最小容量限制;不等式(17)確保電壓穩定裕度恢復到更高水平。

不等式(18)表示電壓極限采用線性靈敏度。公式(19)的約束保證在恒定功率因數情況下減載,給定負載u的相位角為θLu。為減少負荷,考慮母線的最大值,式(20)~(23)對控制變量進行限制,以確保控制量在允許的控制范圍內。
4 基于受端系統無功裕度動態分配
受端系統要充分利用無功補償裝置和無功電源的無功調節容量及調節能力。當系統無功容量不能滿足系統電壓調節需要時,利用無功補償裝置對受端系統進行無功調節。在進行受端系統無功協調控制時,首先應充分利用受端系統本身發電單元的無功調節裕量,預留盡可能多的無功補償裝置調節裕量,以應對送端電網的暫態波動。
受端系統無功分配方法如下:假設在節點i處的無功補償容量為QNi,在節點i處的無功補償裝置的輸出無功功率的初始分配因子如式(24)所示。
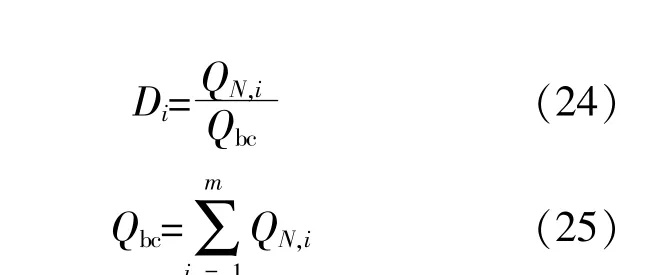
式中:Qbc為無功補償裝置的總容量;m為各節點處投入無功補償裝置的數量。
通過以上分布因子的計算,求解無功調節容量ΔQ在節點i處的無功補償裝置的補償量為ΔQi。

對各節點處無功補償容量的調節裕量進行校驗,若滿足調節條件,方案通過;若無功補償裝置的無功調節裕量不足時,則須進行相應方案的調整。設無功調節容量不足節點的無功補償單元的集合為ΩLack,ΩLack中包含M個元素。調節裕量不足無功補償裝置的當前調節容量為
通過以上方法,形成調節裕量匱乏的無功補償裝置和裕量充裕的無功補償單元無功功率調整量分配系數。
5 跨區域受端電網電壓穩定性控制方法
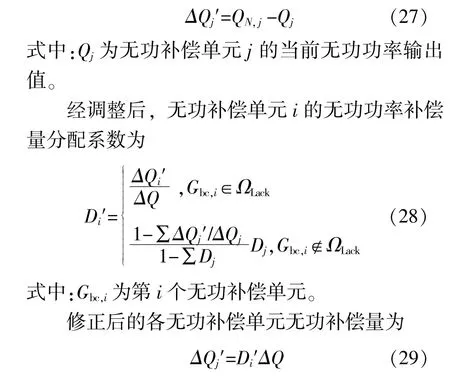
通常情況下,跨區域受端電網可通過多個通道受電,其電壓穩定水平與單通道無功分配裕度相關,多個通道之間無功裕度均衡性越好,受端電網受電能力越高。采用多通道裕度均值和多通道裕度標準差之和的關聯性,表征多通道受電系統暫態受電能力指標。為提高受端系統電壓穩定性水平,采用無功裕度控制方式[15],[16]。
計算單通道無功裕度指標,該系數反映單通道無功裕度期望值:
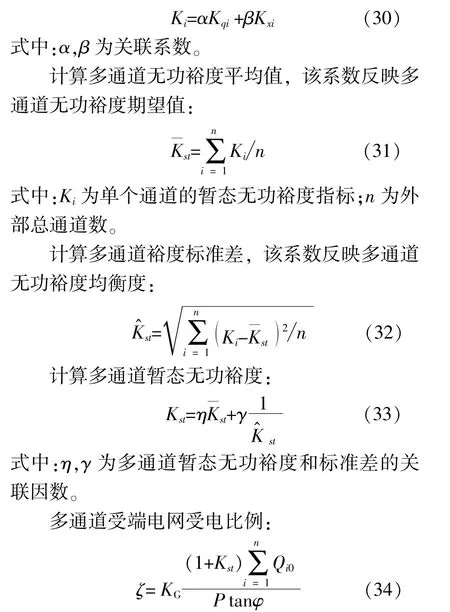
受電比例能夠反映受端電網的受電能力,受電比例越高,表明受端電網網架結構越強,受電能力越強。受電比例確定步驟如下:①確定系統的多個通道,建立多通道受電系統的內、外通道模型;②根據模型計算外部通道的無功裕度指標和暫態無功分配系數,同時根據模型計算內部通道暫態無功系數;③根據外通道無功裕度指標和暫態無功分配系數計算多通道受電系統暫態穩定裕度;④基于多通道受電系統暫態穩定裕度、內通道暫態無功分配系數和負荷功率因數,計算多通道受電系統最大受電比例。
為提高跨區域多通道受端電網受電比例計算的速度及準確度,首先應建立電壓穩定控制訓練數據庫,數據庫由N個運行點數據組成,其中包含D個數據通道。該數據庫由相量測量單元(PMU)記錄,每一個運行節點數據均由測量電壓和電流的幅值和相位角數值表示。同步相位矢量Xi=[Xi1,Xi2,…,XiN]T表示i個運行點。其中,Xij是特征量,或當系統在工作點i從通道j記錄的一定電量的值。集合DU是未標記的數據集合,DU=[X1,X2,…,XN]。對于每個運行點,與Xi對應的矢量為Yi,其向量形式表示為y=[Y1,Y2,…,Yi]。
通過以上矢量數據計算,采用標記的數據集進行機器學習訓練,其控制學習模型為f。通過機器學習,可以預測下一時刻系統的不確定元素xj,為控制過程提供電壓穩定性控制近似值。通過學習建立對應的數據庫,標記每個元素的最佳學習狀態。給定未標記的數據DU,可通過學習找到與之對應的目標DL,從而提高在當前目標上訓練的機器學習模型的預測精度。
基于主動學習的受端系統電壓穩定預測方法如圖2所示。利用機器學習模型的不確定性來選擇數據點進行標注。在每次迭代中,經過部分訓練的分類器從未標記的數據庫中選擇部分不確定的因子。
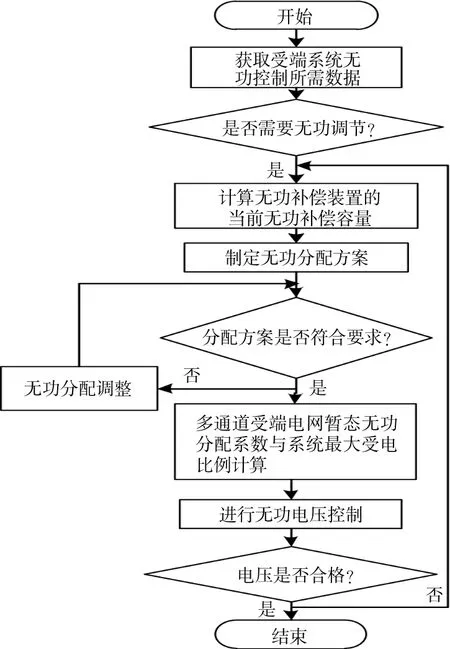
圖2 電壓穩定性學習控制流程Fig.2 Voltage stability learning control process
6 算例分析
在改進的IEEE33節點系統上進行仿真,其中無功補償裝置的接入節點如圖3所示。
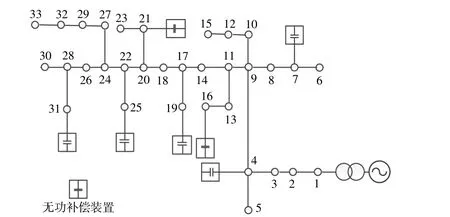
圖3 仿真系統Fig.3 Simulation system
采用基于無功裕度的電網電壓穩定控制方法對某區域受端系統進行仿真分析。該受端電網中在7個節點處安裝無功補償裝置,各節點處電壓無功補償裝置的容量以及各節點的電壓如表1所示。各節點電壓的上限和下限分別為1.05 p.u.和0.95 p.u.。
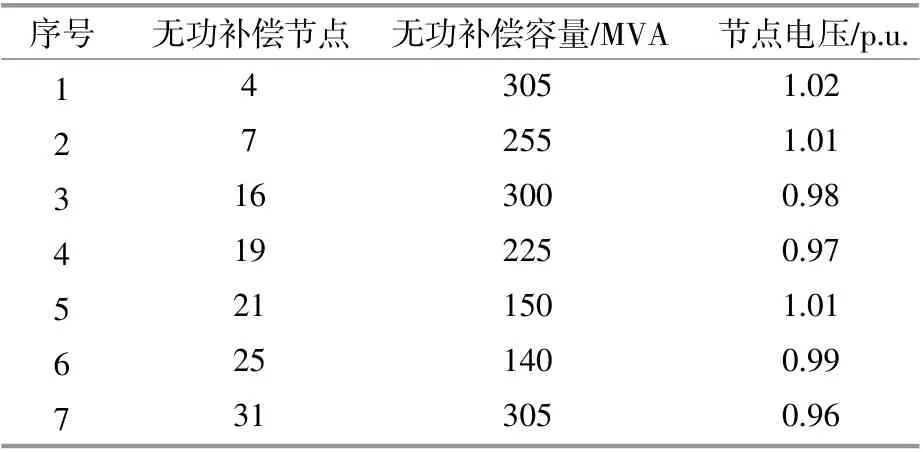
表1 節點電壓及無功補償容量Table 1 Node voltage and reactive power compensation capacity
圖4為采用基于無功裕度的電壓穩定控制方案下某節點發生故障后母線電壓恢復曲線。由圖4可見,采用優化控制后得出的控制方案在電網發生故障后母線電壓恢復更快,系統暫態電壓穩定性更好。
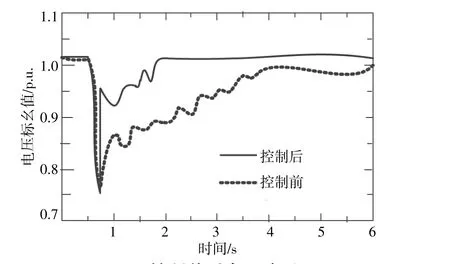
圖4 控制前后電壓波形Fig.4 Voltage waveform before and after control
從表1可以看出,采用基于無功裕度預測的電壓穩定控制方案后,節點4、節點7、節點21和節點31處的接地電壓和無功需求裕度均較高。這是因為在該節點處接入負荷中心220 kV網架,對負荷中心的暫態電壓支撐作用最為明顯。故障前無功補償裝置的出力為1 p.u.,故障切除后的暫態過程中無功補償發出的最大無功功率為1.06 p.u.,可見提高無功補償裝置的無功裕度,可有效增加故障切除后機組的動態無功功率輸出,對系統暫態電壓的支撐起到了很好的作用。節點處無功補償裝置出力情況如圖5所示。
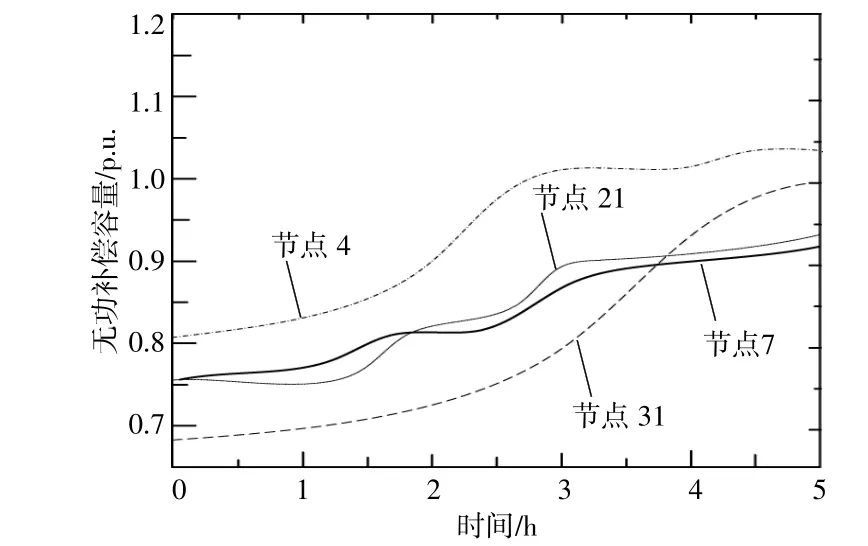
圖5 無功補償裝置補償容量Fig.5 Compensation capacity of reactive power compensation device
采用所建立的模型獲得的暫態電壓穩定裕度值非常小,僅為0.006 8,表明其具有非常高的評估精度。圖6所示為暫態電壓穩定裕度評估結果。圖6中曲線清楚地展示了電壓穩定預測模型的評估裕度與實際值的貼近程度,且具有同步的變化趨勢。電壓穩定的整體效果良好,最大偏差不超過0.01,完全能夠滿足實際評估應用的需要。
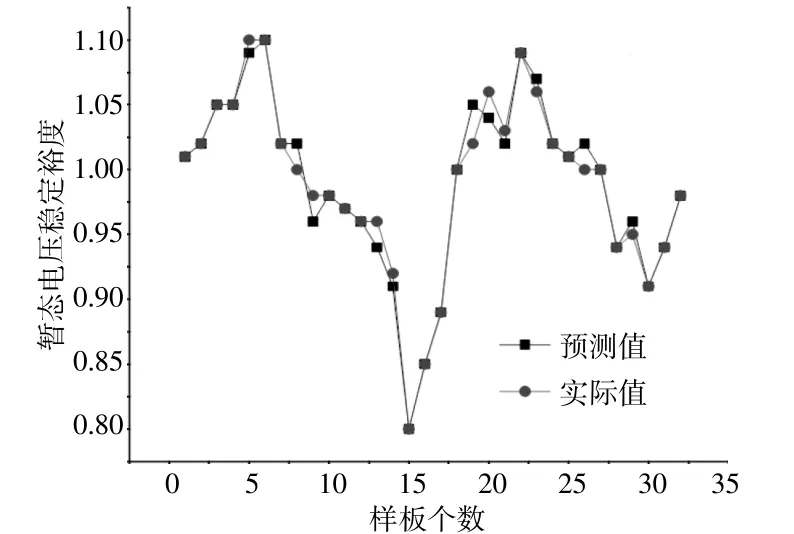
圖6 暫態電壓穩定預測結果Fig.6 Transient voltage stability prediction results
7 結束語
針對受端系統的仿真算例及其仿真結果的分析表明,本文提出的受端系統暫態能量電壓穩定控制模型,在無功控制精度和實時控制的時效性方面均具有較好的控制效果。
本文根據無功與電壓穩定性關系提出了基于無功裕度的主動學習方法,通過為機器學習模型建立數據集,進行高效的數據學習預測,可獲得精確的預測結果。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
