玉米割臺(tái)摘穗裝置的設(shè)計(jì)與仿真
2022-01-24 07:10:36張開興陳鶴王一琨張軍許方鵬趙秀艷
關(guān)鍵詞:設(shè)計(jì)
張開興,陳鶴,王一琨,張軍,許方鵬,趙秀艷
玉米割臺(tái)摘穗裝置的設(shè)計(jì)與仿真
張開興1,3,陳鶴1,王一琨1,張軍4,許方鵬4,趙秀艷2*
1. 山東農(nóng)業(yè)大學(xué)機(jī)械與電子工程學(xué)院, 山東 泰安 271018 2. 山東農(nóng)業(yè)大學(xué)信息科學(xué)與工程學(xué)院, 山東 泰安 271018 3. 山東省農(nóng)業(yè)裝備智能化工程實(shí)驗(yàn)室, 山東 泰安 271018 4. 泰安磐然測(cè)控科技有限公司, 山東 泰安 271000
針對(duì)我國常用的縱臥式玉米摘穗裝置,果穗啃傷率、籽粒損失率較高的問題,本文設(shè)計(jì)了一種高效低損的板式玉米摘穗裝置。首先,通過理論分析計(jì)算得到拉莖輥直徑、長度、摘穗板尺寸等關(guān)鍵參數(shù)的設(shè)計(jì)范圍;其次,結(jié)合玉米植株的物理參數(shù),確定了拉莖輥、摘穗板的外形尺寸,并建立了三維模型;最后,對(duì)摘穗裝置的工作過程進(jìn)行了仿真分析,以拉莖輥轉(zhuǎn)速、機(jī)器的前進(jìn)速度以及摘穗裝置的傾角三個(gè)因素為試驗(yàn)因素,進(jìn)行虛擬正交試驗(yàn),得到了摘穗裝置較優(yōu)的收獲參數(shù)組合為拉莖輥轉(zhuǎn)速750 r/min,機(jī)器前進(jìn)速度5 km/h,摘穗裝置傾角為25°。
玉米收獲機(jī); 摘穗裝置; 仿真分析
玉米是我國主要糧食作物,種植面積和產(chǎn)量都超過水稻和小麥,而且近幾年仍在不斷增加[1,2]。目前,我國在玉米的生產(chǎn)上,機(jī)械化水平仍較為薄弱,僅靠人力收獲玉米,勞動(dòng)量非常大。因此,迫切需要收獲機(jī)械來代替部分人工勞動(dòng)[3-5]。玉米摘穗裝置是玉米收獲機(jī)的關(guān)鍵組成部分,在收獲過程中有重要作用。現(xiàn)階段我國玉米收獲機(jī)上安裝的摘穗裝置,大多是縱臥式結(jié)構(gòu),其摘穗原理是通過拉伸玉米莖稈,擠壓玉米果穗來完成收獲[6,7]。這種摘穗原理就決定了玉米果穗會(huì)與摘穗輥直接接觸,極易對(duì)果穗造成啃傷,從而導(dǎo)致籽粒損失率較高[8,9]。對(duì)此,本文以玉米摘穗裝置的創(chuàng)新設(shè)計(jì)為落腳點(diǎn),以減少果穗的啃傷、降低玉米籽粒損失率為目標(biāo),設(shè)計(jì)一種板式玉米摘穗裝置,與其他割臺(tái)的摘穗裝置相比,該裝置能實(shí)現(xiàn)避免拉莖輥與果穗的直接接觸,減少果穗的啃傷率,同時(shí)也能提高摘穗效率。通過仿真分析,驗(yàn)證了本裝置的優(yōu)良性和合理性,為我國玉米收獲技術(shù)的研究提供了參考。
1 結(jié)構(gòu)與工作原理
1.1 整體結(jié)構(gòu)
本割臺(tái)為5行式,主要由分禾器、摘穗裝置、攪龍、機(jī)架組成。摘穗裝置主要由摘穗板、拉莖輥組成。摘穗板安裝在兩拉莖輥的上方,摘穗板上方則安裝有撥禾鏈,其作用是喂入玉米莖稈、同時(shí)將摘下的果穗輸送到攪龍。兩拉莖輥并排安裝在摘穗板的下方,拉莖輥前端是螺旋導(dǎo)錐,起導(dǎo)入莖稈的作用。如圖1為割臺(tái)整體結(jié)構(gòu)示意圖。
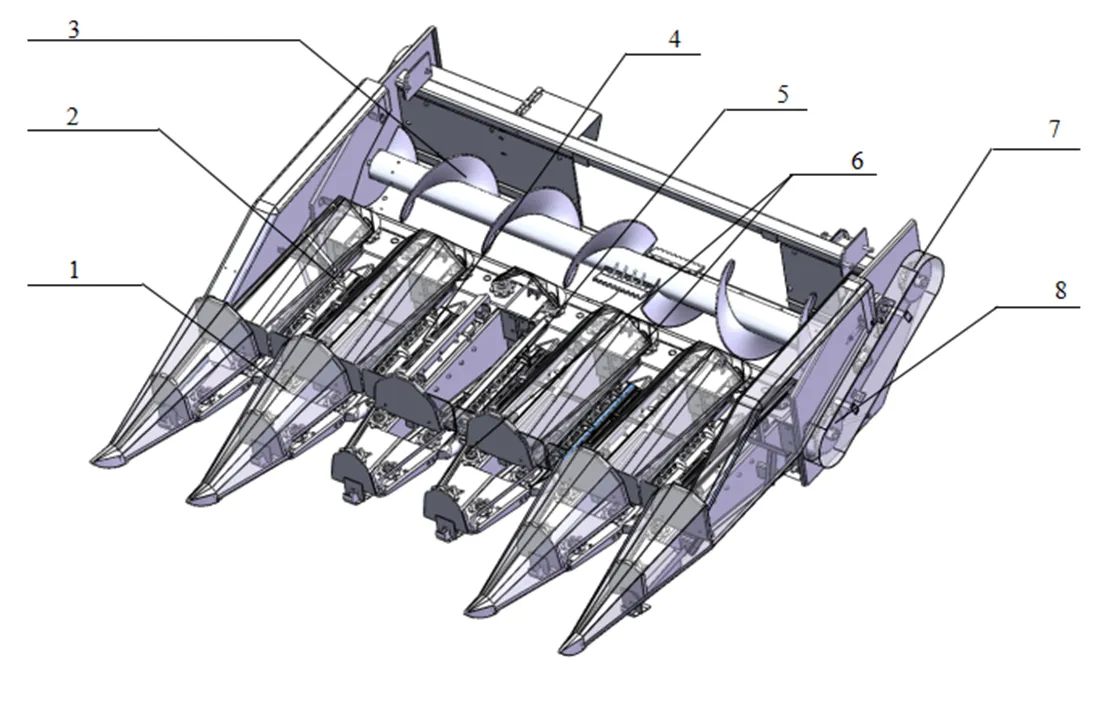
圖 1 摘穗板拉莖輥組合式割臺(tái)結(jié)構(gòu)示意圖
1.分禾器 2.撥禾鏈 3.攪龍 4.摘穗板 5.拉莖輥 6.撥禾鏈輪 7.動(dòng)力輸入鏈輪 8.摘穗驅(qū)動(dòng)鏈輪
割臺(tái)的核心部分是摘穗裝置,主要由拉莖輥、摘穗板組成,本文主要對(duì)拉莖輥、摘穗板進(jìn)行了設(shè)計(jì),并進(jìn)行了仿真分析。圖2是割臺(tái)的摘穗裝置。
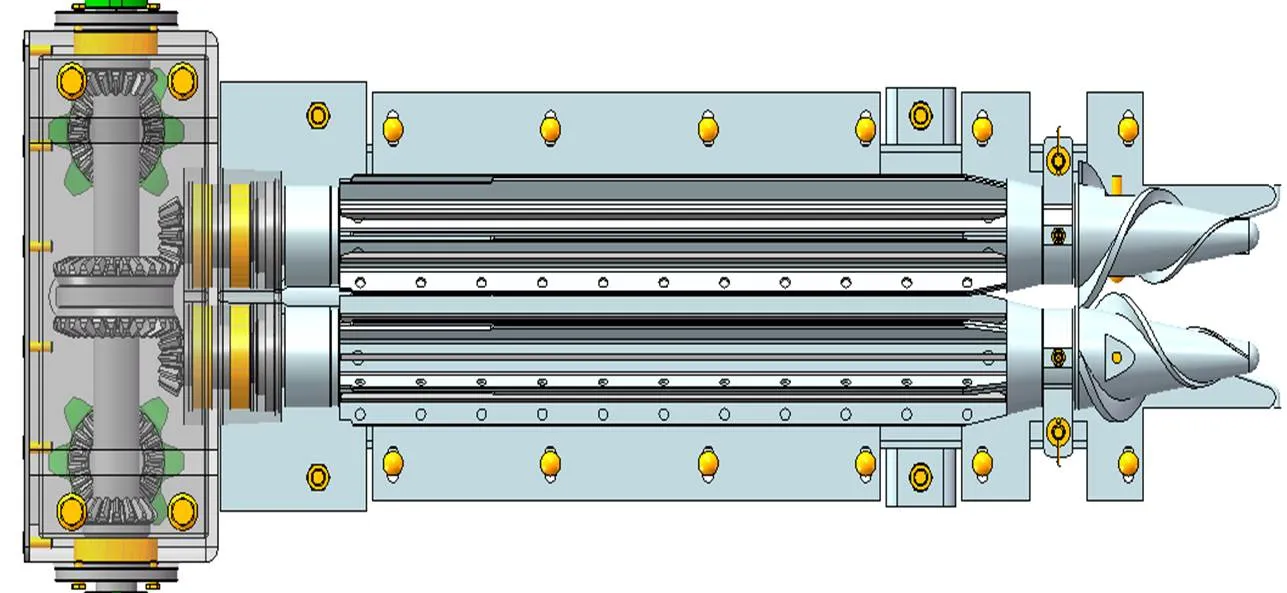
圖 2 摘穗裝置
1.2 工作原理
在玉米收獲過程中,玉米莖稈先受到分禾器的作用,被引向撥禾鏈,在撥禾鏈的作用下向后運(yùn)動(dòng),隨后進(jìn)入拉莖輥的導(dǎo)入段,在撥禾鏈和拉莖輥導(dǎo)入段的雙重作用下,進(jìn)入拉莖輥拉莖段,此時(shí)玉米莖稈受到下拉作用而向下運(yùn)動(dòng),果穗受到摘穗板的阻礙被強(qiáng)制摘下。摘落的玉米果穗受到撥禾鏈的作用向后運(yùn)動(dòng),最后進(jìn)入攪龍。攪龍將其送入一級(jí)升運(yùn)器[10]。
2 摘穗裝置的設(shè)計(jì)
2.1 拉莖輥
拉莖輥的直徑是關(guān)鍵參數(shù)之一,其直接決定了抓取莖稈的效果[11]。想要抓取玉米莖稈,拉莖輥對(duì)莖稈的起始抓取角不能過大[12,13]。由于摘穗板拉莖輥組合式割臺(tái)的工作原理,導(dǎo)致較容易出現(xiàn)斷稈的情況[14]。圖3是拉莖輥工作簡圖。
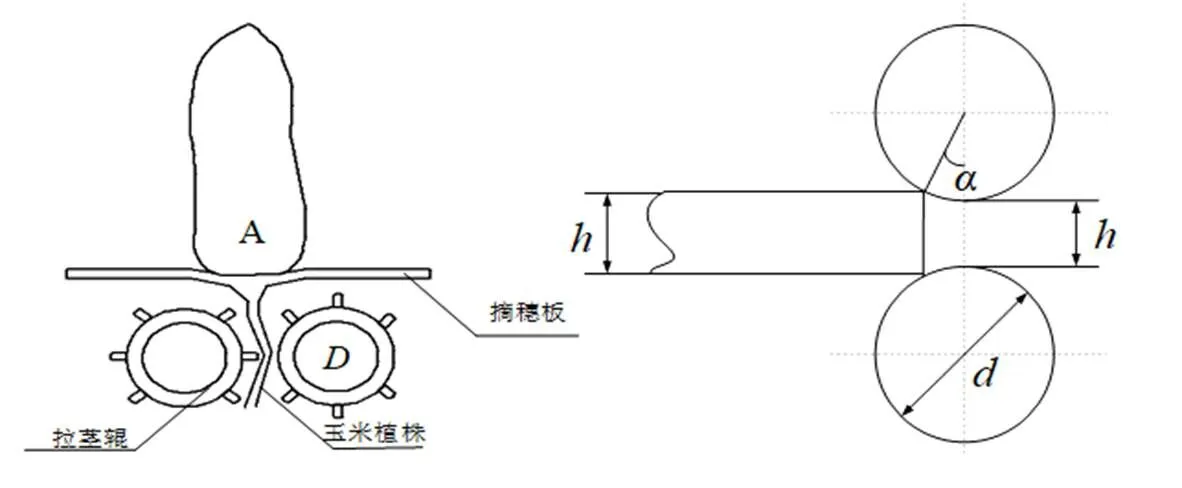
圖 3 拉莖輥工作原理簡圖
因此,在能保證抓取玉米莖稈的前提下,應(yīng)盡量避免或減少斷稈情況的出現(xiàn)。抓取莖稈時(shí)應(yīng)滿足公式:
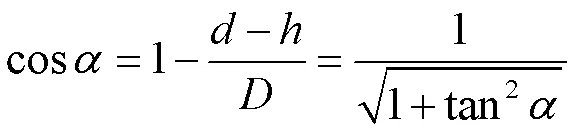
式中:-拉莖輥的直徑;玉米莖稈的直徑;-拉莖輥的間隙;-拉莖輥的初始抓取角。
拉莖輥的設(shè)計(jì)應(yīng)滿足抓取玉米莖稈但不抓取果穗,其直徑應(yīng)滿足:
根據(jù)玉米植株的物理參數(shù),結(jié)穗部位莖稈直徑d=15~24mm,平均約為19.2mm,=0.4~0.5,果穗大端直徑d=40~63mm,平均約為52.0mm,兩拉莖輥間隙設(shè)定為=8mm。取μ≈μ=0.7~1.1[15]。
將上述數(shù)據(jù)帶入式中,可以得到滿足抓取莖稈但不抓取果穗的拉莖輥的直徑的范圍:88.9 mm≤≤97.8 mm。
本文結(jié)合拉莖效率,割臺(tái)空間布局,最終確定拉莖輥的直徑為=95mm。
對(duì)于拉莖輥工作長度的設(shè)計(jì),需要滿足兩個(gè)條件,一是能保證同時(shí)多棵玉米植株的摘穗作業(yè),其次是要能適應(yīng)玉米果穗不同的結(jié)穗高度。拉莖輥拉引莖稈的過程圖如下:
圖 4 拉莖輥工作簡圖
圖中是玉米莖稈的初始位置,其與拉莖輥的夾角記為,AB是玉米莖稈的最終位置。
由圖可以得出:
==cos(3)
式中:-玉米莖稈在初始位置時(shí)與拉莖輥的夾角,(°);-玉米莖稈的長度,mm。
從上式可以看出,拉莖輥的工作長度與玉米莖稈在初始位置時(shí)與拉莖輥的夾角成反比。當(dāng)夾角減小時(shí),拉莖輥的工作長度就需要增加。查閱文獻(xiàn)可知,用于玉米摘穗時(shí)拉莖輥軸線與水平面呈25o~35o的傾角[16,17],本文設(shè)計(jì)拉莖輥軸線傾角與割臺(tái)傾角一致,記為25o。
同時(shí),拉莖輥的最小長度min還須滿足:

式中:min-拉莖輥?zhàn)钚¢L度;L-摘穗時(shí)玉米莖稈在水平方向上移動(dòng)的距離;-拉莖輥軸線與水平方向的夾角。
根據(jù)前文計(jì)算得出的數(shù)據(jù),最終得到拉莖輥的最小長度約為min=400mm。綜合實(shí)際考慮,本文設(shè)計(jì)拉莖輥拉莖段的長度為=570mm。
根據(jù)分析計(jì)算,最終確定兩拉莖輥的工作間隙為8mm,拉莖輥的直徑為95mm,拉莖段長度為570mm,最終建立拉莖輥的三維模型如圖5所示。

圖 5 六棱式拉莖輥
2.2 摘穗板
摘穗板是割臺(tái)摘穗機(jī)構(gòu)的關(guān)鍵部件,其直接決定了玉米的收獲效率和收獲質(zhì)量[18]。摘穗板的結(jié)構(gòu)中,摘穗板邊緣對(duì)收獲質(zhì)量影響最大。目前摘穗板邊緣結(jié)構(gòu)主要有直角倒角型、圓柱型、圓弧型[19]。如圖6所示。
圖 6 不同邊緣結(jié)構(gòu)的摘穗板
本文設(shè)計(jì)的摘穗板采用直角倒角型設(shè)計(jì),折彎長度為31.5mm,折彎角度設(shè)計(jì)為17o,同時(shí)在每個(gè)摘穗板邊緣焊接圓柱鋼筋,減小果穗被卡住的幾率,以此來降低斷稈率,提高收獲質(zhì)量。摘穗板間隙大小應(yīng)滿足允許最粗的莖稈通過,阻礙最小的果穗通過。本文將摘穗板間隙大小設(shè)計(jì)為35mm。最終建立摘穗板的三維模型如圖7。
圖 7 摘穗板的三維模型
3 摘穗過程的仿真分析
3.1 模型建立
摘穗裝置和玉米植株在SolidWorks軟件中完成建模后,導(dǎo)入到多體動(dòng)力學(xué)軟件ADAMS,并在ADAMS中對(duì)植株模型進(jìn)行柔性體化。對(duì)摘穗裝置各部件分別修改材料,并添加連接關(guān)系。莖稈與地面、莖稈與果穗間分別建立Bushing柔性連接[20]。設(shè)定完成后的仿真模型如圖8所示。
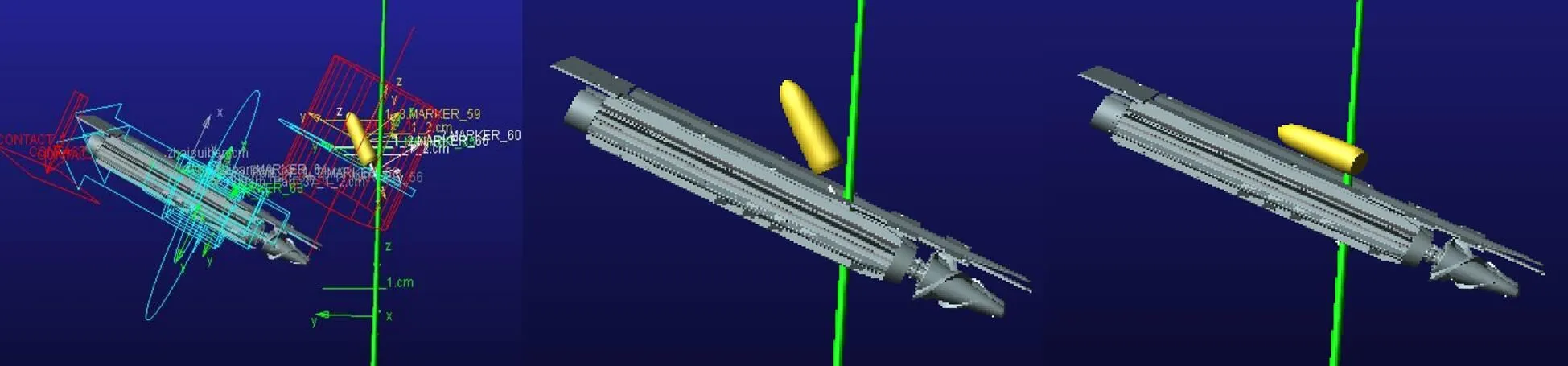
圖 8 摘穗仿真過程
3.2 玉米莖稈與拉莖輥的仿真分析
在摘穗過程中,莖稈受拉莖輥的擠壓接觸力產(chǎn)生變形。接觸力越大,就說明莖稈的變形量越大,當(dāng)接觸力過大時(shí),就容易出現(xiàn)斷稈的現(xiàn)象。圖9是機(jī)器前進(jìn)速度為1 m/s、拉莖輥轉(zhuǎn)速為1000 r/min時(shí),莖稈所受到的兩拉莖輥的接觸力曲線圖:
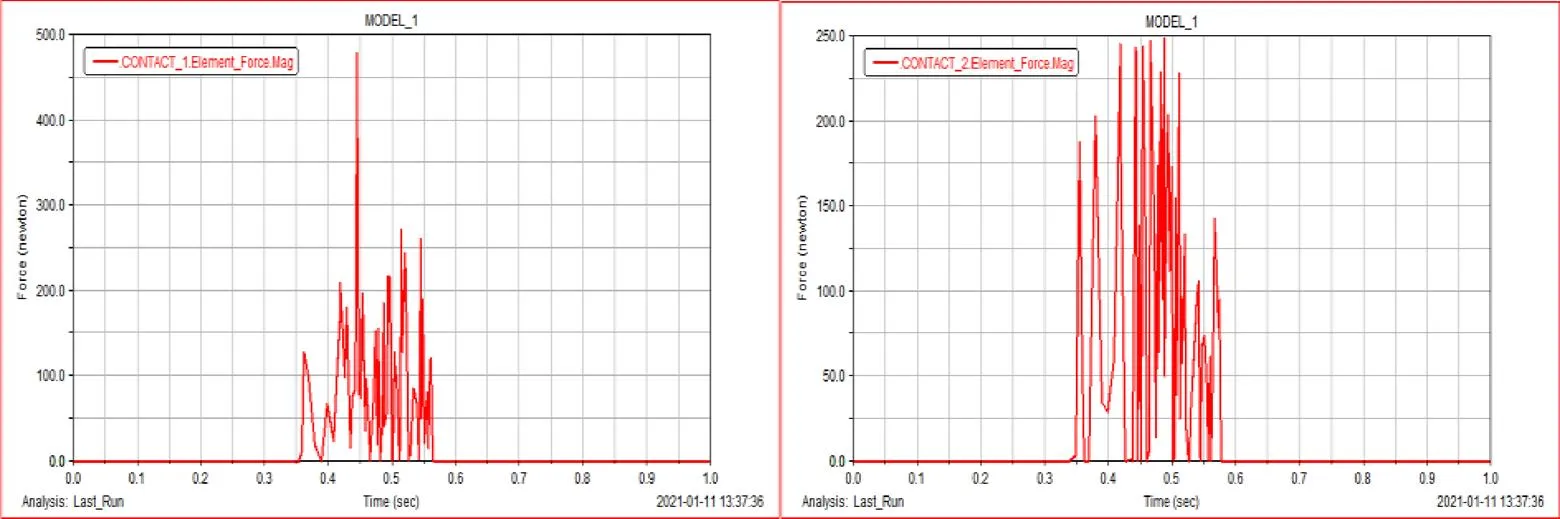
圖 9 玉米莖稈與拉莖輥一接觸力曲線圖
結(jié)合兩圖可以看出,隨著收獲機(jī)的前進(jìn),在0.34 s時(shí),玉米植株觸碰到拉莖輥導(dǎo)錐,受到導(dǎo)錐的推進(jìn)作用,之后到達(dá)拉莖輥拉莖段,開始受到兩拉莖輥的擠壓下拉作用,在玉米果穗受到摘穗板阻礙被強(qiáng)制摘落時(shí),圖中出現(xiàn)莖稈與拉莖輥接觸力的最大值,約為480 N,說明在果穗被摘落的瞬間,此時(shí)拉莖輥一的凸棱正作用在玉米莖稈上。果穗被摘落后,結(jié)穗位之上的莖稈繼續(xù)受拉莖輥?zhàn)饔孟蛳逻\(yùn)動(dòng),直到0.58s時(shí),完成摘穗。
3.3 拉莖輥轉(zhuǎn)速對(duì)拉莖效率的影響
圖10為機(jī)器前進(jìn)速度為1m/s,拉莖輥不同轉(zhuǎn)速下,玉米莖稈在Z軸方向的位移曲線圖。
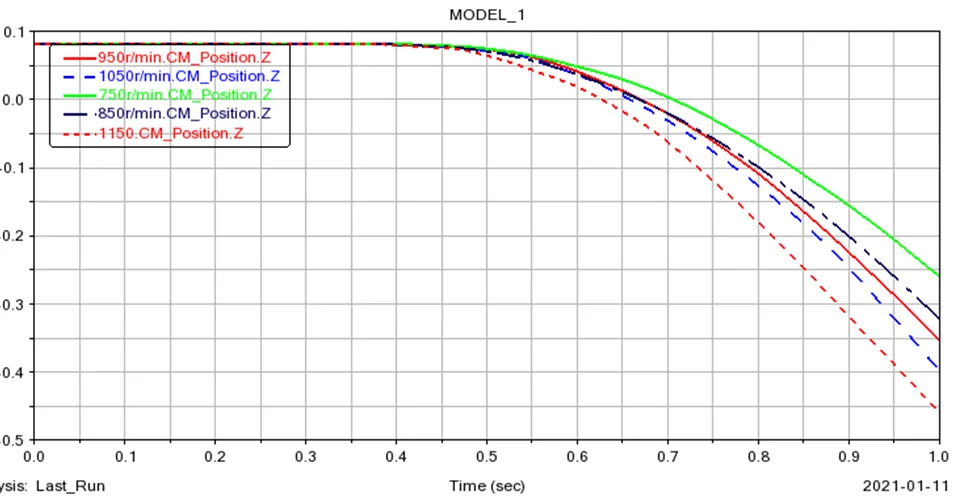
圖 10 拉莖輥不同轉(zhuǎn)速下莖稈在Z軸方向的位移
從圖中可以看出,玉米植株在0.5s時(shí)進(jìn)入拉莖輥拉莖段,在拉莖輥不同轉(zhuǎn)速下,相同時(shí)間內(nèi),莖稈的位移量不同,對(duì)比分析可知,隨著拉莖輥轉(zhuǎn)速的提升,拉莖效率隨之提升。仿真分析發(fā)現(xiàn),當(dāng)拉莖輥轉(zhuǎn)速為650r/min時(shí),莖稈位移變化過小,拉莖時(shí)間過長,容易產(chǎn)生堵塞;當(dāng)拉莖輥轉(zhuǎn)速為1150r/min時(shí),莖稈位移變化較大,即受拉莖輥的下拉作用較強(qiáng),此時(shí)更容易發(fā)生斷稈現(xiàn)象。
3.4 摘穗過程的虛擬正交試驗(yàn)
以拉莖輥轉(zhuǎn)速、機(jī)器的前進(jìn)速度以及摘穗裝置傾角這三個(gè)重要的因素為試驗(yàn)因素,通過3因素3水平的虛擬正交試驗(yàn),分析摘穗過程中果穗的受到的碰撞力大小,以此研究上述3個(gè)因素對(duì)于摘穗效果的影響規(guī)律,從而確定收獲時(shí)較優(yōu)的工作參數(shù)。表1是虛擬正交試驗(yàn)的因素與水平表。

表 1 虛擬正交試驗(yàn)因素與水平表
圖11是玉米果穗被摘落時(shí)所受到的接觸力大小曲線。
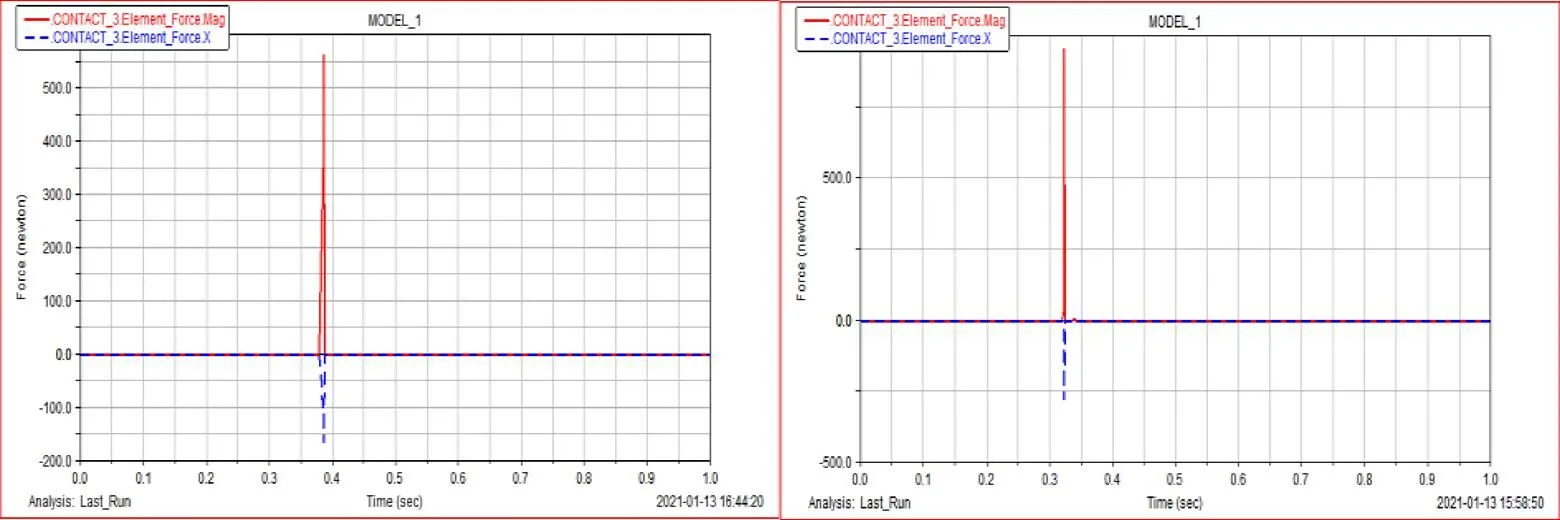
圖 11 機(jī)器前進(jìn)速度5 km/h,拉莖輥轉(zhuǎn)速750 r·min-1、1050 r·min-1果穗所受接觸力
從圖11中可以看出,摘穗過程只有一個(gè)波峰產(chǎn)生,說明果穗直接被摘落,摘穗機(jī)構(gòu)的摘穗效果較好,不易出現(xiàn)堵塞的情況。表2是虛擬正交試驗(yàn)結(jié)果表,分析數(shù)據(jù)可以得出,拉莖輥轉(zhuǎn)速對(duì)于摘穗過程中果穗受到的碰撞力影響較大,當(dāng)拉莖輥轉(zhuǎn)速為750r/min時(shí),果穗受到的碰撞力普遍較小;當(dāng)拉莖輥轉(zhuǎn)速為1050r/min時(shí),果穗受到的碰撞力普遍較大,這會(huì)導(dǎo)致籽粒損失率較高。
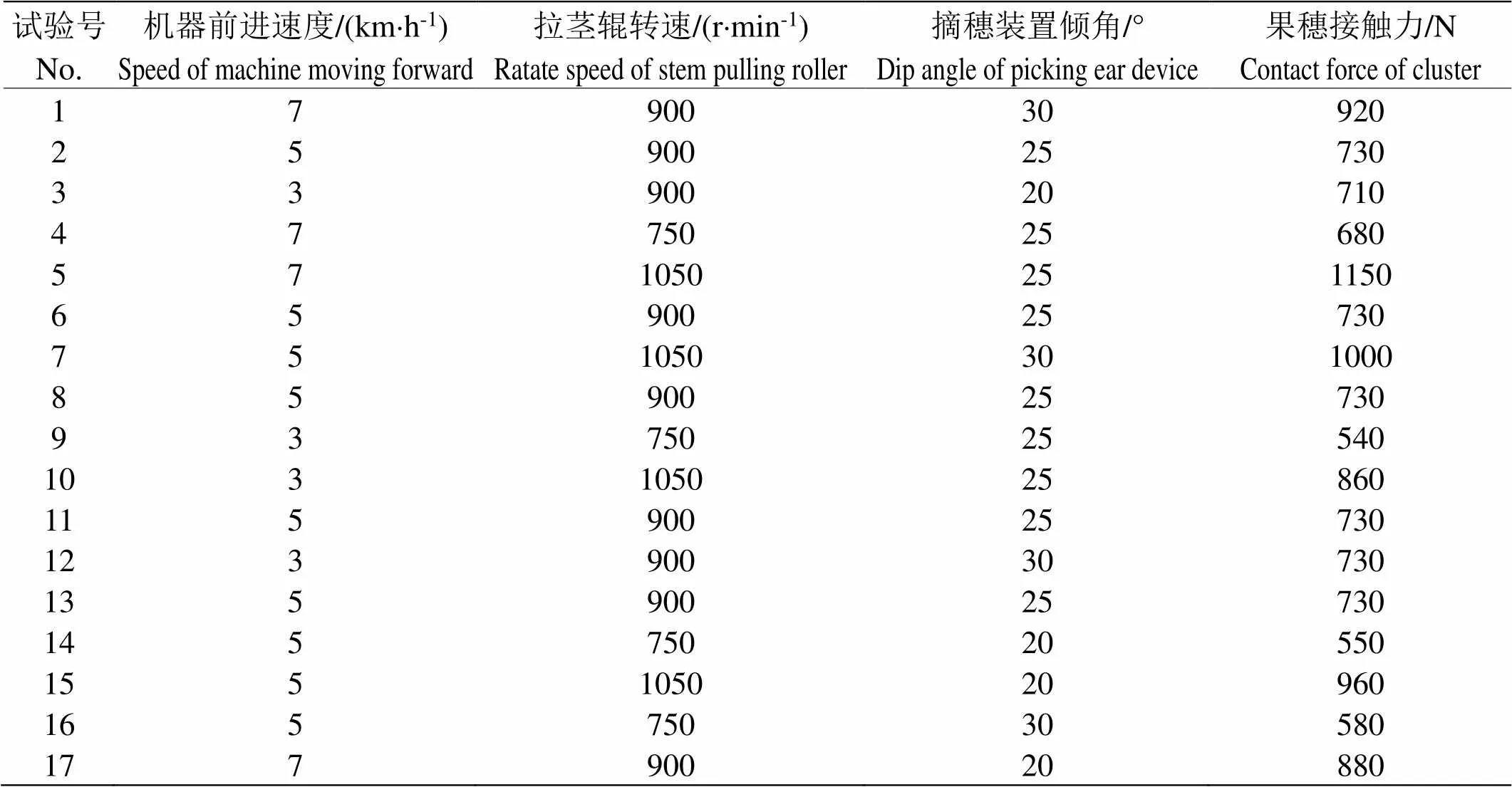
表 2 虛擬正交試驗(yàn)結(jié)果表
通過Design-Expert軟件,以拉莖輥轉(zhuǎn)速、機(jī)器作業(yè)速度以及摘穗裝置傾角為試驗(yàn)因素,以玉米果穗所受碰撞力為響應(yīng)值,進(jìn)行響應(yīng)面分析試驗(yàn)。對(duì)試驗(yàn)結(jié)果進(jìn)行分析,得到果穗所受碰撞力的回歸方程為:=730+205+98.75+13.75+37.5+7.5+5+17.52+602+202(6)
為更加直觀地分析各影響因素與摘穗裝置性能之間的關(guān)系,對(duì)試驗(yàn)數(shù)據(jù)處理獲得拉莖輥轉(zhuǎn)速、機(jī)器的前進(jìn)速度、摘穗裝置傾角對(duì)玉米果穗所受碰撞力影響的響應(yīng)曲面圖如圖12所示。
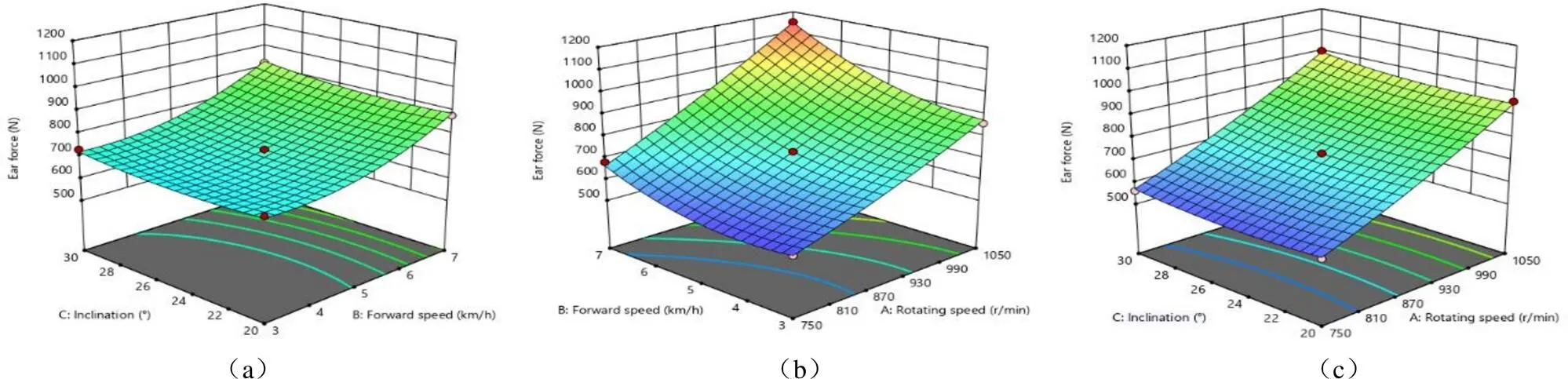
圖 12 拉莖輥轉(zhuǎn)速、機(jī)器作業(yè)速度、摘穗裝置傾角對(duì)接觸力的影響
圖12(a)是摘穗裝置傾角和機(jī)器前進(jìn)速度對(duì)接觸力的影響,從中可以看出,隨著摘穗裝置傾角的增大,果穗所受碰撞力也隨之改變,但變化幅度較小;相比較而言,機(jī)器的前進(jìn)速度對(duì)果穗受到的碰撞力影響大于摘穗裝置傾角的影響。
圖12(b)、(c)分別是機(jī)器前進(jìn)速度和拉莖輥轉(zhuǎn)速、摘穗裝置傾角和拉莖輥轉(zhuǎn)速對(duì)接觸力的影響,從中可以看出,拉莖輥的轉(zhuǎn)速對(duì)玉米果穗所受碰撞力大小的影響較為顯著,果穗所受碰撞力隨拉莖輥轉(zhuǎn)速的增大而明顯增大。通過分析可以得出,拉莖輥轉(zhuǎn)速對(duì)果穗碰撞力的影響效果比機(jī)器前進(jìn)速度的影響效果更為顯著。結(jié)合曲面圖,從收獲效率角度考慮,機(jī)器前進(jìn)速度為5km/h,拉莖輥轉(zhuǎn)速為750r/min,摘穗裝置傾角為25o的收獲參數(shù)組合更為合適。
4 結(jié)論
(1)設(shè)計(jì)了一種摘穗板拉莖輥組合式的玉米摘穗裝置,解決了目前玉米摘穗裝置存在果穗啃傷率高,收獲效率低等問題,實(shí)現(xiàn)了玉米收獲過程中的高效性和低損性;并對(duì)關(guān)鍵部件進(jìn)行了理論分析,給出了計(jì)算方法,確定了拉莖輥、摘穗板的結(jié)構(gòu)與參數(shù);
(2)通過ADAMS軟件進(jìn)行了摘穗過程的虛擬仿真試驗(yàn),通過運(yùn)用傳感器與腳本控制的方法分析了摘穗過程中玉米莖稈所受到的接觸力,并得到了較為合適的拉莖輥轉(zhuǎn)速范圍為750 r/min~1050 r/min;通過虛擬正交試驗(yàn),分析了不同拉莖輥轉(zhuǎn)速與不同的機(jī)器前進(jìn)速度作用下玉米果穗被摘落時(shí)所受碰撞力的大小,并通過響應(yīng)面分析,得出較優(yōu)的收獲參數(shù)組合為拉莖輥轉(zhuǎn)速750 r/min,機(jī)器前進(jìn)速度5 km/h,摘穗裝置傾角為25o。
[1] 卜令昕,張道林,李騰,等.不對(duì)行玉米收獲機(jī)割臺(tái)扶禾裝置的分析與仿真[J].農(nóng)機(jī)化研究,2016,38(4):57-60,242
[2] 崔濤,樊晨龍,張東興,等.玉米機(jī)械化收獲技術(shù)研究進(jìn)展分析[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2019,50(12):1-13
[3] 辛尚龍,趙武云,戴飛,等.旱區(qū)全膜雙壟溝播履帶式玉米聯(lián)合收獲機(jī)的設(shè)計(jì)[J].農(nóng)業(yè)工程學(xué)報(bào),2019,35(14):1-11
[4] 郭君娣,伍德林,陳黎卿.基于ADAMS的玉米莖稈與收獲割臺(tái)仿真[J].農(nóng)機(jī)化研究,2016,38(03):80-85,100
[5] 景楓,周學(xué)建,師清翔,等.玉米秸稈橫向輸送裝置結(jié)構(gòu)運(yùn)動(dòng)參數(shù)試驗(yàn)研究[J].河南科技大學(xué)學(xué)報(bào)(自然科學(xué)版), 2011,32(4):60-64,111
[6] 姚艷春,宋正河,杜岳峰,等.玉米收獲機(jī)割臺(tái)振動(dòng)特性及其主要影響因素分析[J].農(nóng)業(yè)工程學(xué)報(bào),2017,33(13):40-49
[7] 崔中凱,張華,周進(jìn),等.智能玉米籽粒聯(lián)合收獲機(jī)設(shè)計(jì)與試驗(yàn)[J].中國農(nóng)機(jī)化學(xué)報(bào),2019,40(9):26-30
[8] 刁培松,張道林,劉海濤,等.新型穗莖兼收型玉米收獲機(jī)的研制[J].農(nóng)機(jī)化研究,2010,32(12):85-87,91
[9] Por M, Raoufat MH, Kamgar R. Development and field evaluation of a rotary hydraulic divider for canola harvesting [J]. Journal of Science and Technology of Agriculture and Natural Resources, 2009,13(47):181
[10] Bai J, Ma SH, Wang FL,. Performance of crop dividers with reference to harvesting lodged sugarcane [J]. Sugar Tech, 2020,22(6):1-8
[11] 劉靜,刁培松,張道林,等.玉米收獲機(jī)分禾器的研究[J].農(nóng)機(jī)化研究,2007(11):145-146,149
[12] 郭倉庫,安靜,余泳昌.4YW—3型互換割臺(tái)式玉米收獲機(jī)的改進(jìn)探索與實(shí)踐[J].農(nóng)業(yè)技術(shù)與裝備,2010(2):14-15
[13] 李山山.自走式玉米收獲機(jī)總體結(jié)構(gòu)布局優(yōu)化設(shè)計(jì)與虛擬驗(yàn)證方法研究[D].北京:中國農(nóng)業(yè)大學(xué),2016
[14] 張鋒偉,宋學(xué)鋒,張雪坤,等.玉米秸稈揉絲破碎過程力學(xué)特性仿真與試驗(yàn)[J].農(nóng)業(yè)工程學(xué)報(bào),2019,35(9):58-65
[15] 賀俊林,佟金,胡偉,等.輥型和作業(yè)速度對(duì)玉米收獲機(jī)摘穗性能的影響[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2006(3):46-49
[16] 康云友,張道林,鹿秀鳳,等.玉米籽粒機(jī)械化直收技術(shù)與機(jī)具試驗(yàn)研究[J].農(nóng)機(jī)化研究,2019,41(4):176-181
[17] 張智龍,張東興,崔濤,等.玉米梳齒摘穗單體機(jī)構(gòu)設(shè)計(jì)與試驗(yàn)[J].農(nóng)業(yè)工程學(xué)報(bào),2014,30(20):1-9
[18] 付乾坤,付君,王鋒德,等.輪式剛?cè)狁詈蠝p損玉米摘穗割臺(tái)的設(shè)計(jì)與參數(shù)優(yōu)化[J].農(nóng)業(yè)工程學(xué)報(bào),2019,35(7):21-30
[19] 張智龍,崔濤,耿愛軍,等.玉米梳脫摘穗割臺(tái)設(shè)計(jì)與仿真分析[J].中國農(nóng)機(jī)化學(xué)報(bào),2020,41(5):26-30,93
[20] 張明濤,呂新民,劉洋.玉米摘穗裝置的研究設(shè)計(jì)[J].農(nóng)機(jī)化研究,2008(3):116-118
Design and Simulation of Corn Header Ear Picking Device
ZHANG Kai-xing1,3, CHEN He1, WANG Yi-kun1, ZHANG Jun4, XU Fang-peng4, ZHAO Xiu-yan2
1.271018,2271018,3271018,4.271000,
In order to solve the problems of high ear gnawing rate and grain loss rate of the vertical and horizontal corn ear picking device commonly used in China, a plate corn ear picking device with high efficiency and low loss was designed. Firstly, through theoretical analysis and calculation, the design range of key parameters such as the diameter, length of the stem pulling roller and the size of the ear picking plate was obtained; Secondly, combined with the physical parameters of corn plant, the external dimensions of stalk pulling roller and ear picking board were determined, and the three-dimensional model was established; Finally, the working process of the ear picking device was simulated and analyzed. The virtual orthogonal experiment was carried out with three factors as the experimental factors: the speed of the stem pulling roller, the forward speed of the machine and the inclination angle of the ear picking device. The optimal harvest parameters of the ear picking device were obtained as follows: the speed of the stem pulling roller was 750 r/min, the forward speed of the machine was 5 km/h, and the inclination angle of the ear picking device was 25 degrees.
Corn harvester;ear picking device; simulation analysis
S225.5+1
A
1000-2324(2021)06-1042-07
2021-06-12
2021-11-05
山東省農(nóng)業(yè)重大應(yīng)用技術(shù)創(chuàng)新項(xiàng)目(SD2019NJ011);山東省重點(diǎn)研發(fā)計(jì)劃項(xiàng)目(2019GNC106120)
張開興(1984-),男,博士,副教授,主要從事農(nóng)業(yè)機(jī)械化與信息化研究. E-mail:kaixingzhang@139.com
通訊作者:Author for correspondence. E-mail:zhaoxy@sdau.edu.cn
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
 山東農(nóng)業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版)2021年6期
山東農(nóng)業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版)2021年6期
- 山東農(nóng)業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版)的其它文章
- 灌溉系統(tǒng)輔助開發(fā)平臺(tái)的設(shè)計(jì)與實(shí)現(xiàn)
- 基于Recurdyn的履帶式三七收獲機(jī)不同收獲工況性能分析
- 農(nóng)村景觀環(huán)境綜合整治的低成本控制方法及技術(shù)措施研究
- 基于CFD-DEM耦合的核桃殼仁混合物負(fù)壓風(fēng)選仿真研究
- 水泵站自動(dòng)充水水箱試驗(yàn)研究
- 基于改進(jìn)的水質(zhì)標(biāo)識(shí)指數(shù)法的碧流河水庫水質(zhì)評(píng)價(jià)