東風悅達起亞智能網聯汽車凱酷車輛盲區監測系統的設計
2022-01-26 05:24:50安徽程增木
汽車維修與保養 2021年9期
◆文/安徽 程增木
本文,筆者將基于起亞集團的凱酷(全新一代K5)車型,從系統定義、系統構成、系統工作原理、系統應用等方面介紹智能駕駛中一個重要功能——車輛盲區監測系統。
一、車輛盲區監測系統的定義
車輛在變道行駛時,由于轉彎時后視鏡存在視野盲區,駕駛員僅憑后視鏡的信息是無法完全判斷后方車輛的信息,在一些惡劣天氣,例如雨雪、大霧、冰雹等天氣狀況時增大了駕駛員的判斷難度,汽車在變道行駛時存在碰撞或刮擦的危險。車輛盲區監測系統(Blind-Spot Collision-Avoidance Assist,BCA)通過安裝在左右后視鏡或其他位置的傳感器感知后方道路信息,如果后方有車輛、行人、自行車及其他移動物體靠近時,盲區監測系統就會通過聲光報警器提醒駕駛員或在緊急情況下進行制動。車輛盲區監測系統的系統示意圖如圖1所示。
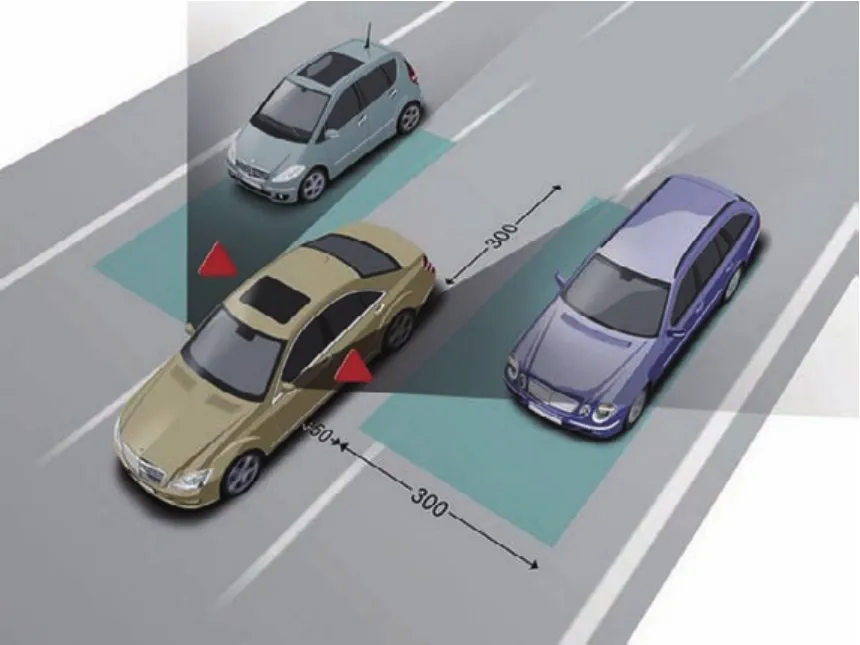
圖1 車輛盲區監測系統的示意圖
二、車輛盲區監測系統的組成
車輛盲區監測系統一般由感知單元、電子控制單元和執行單元等組成,如圖2所。
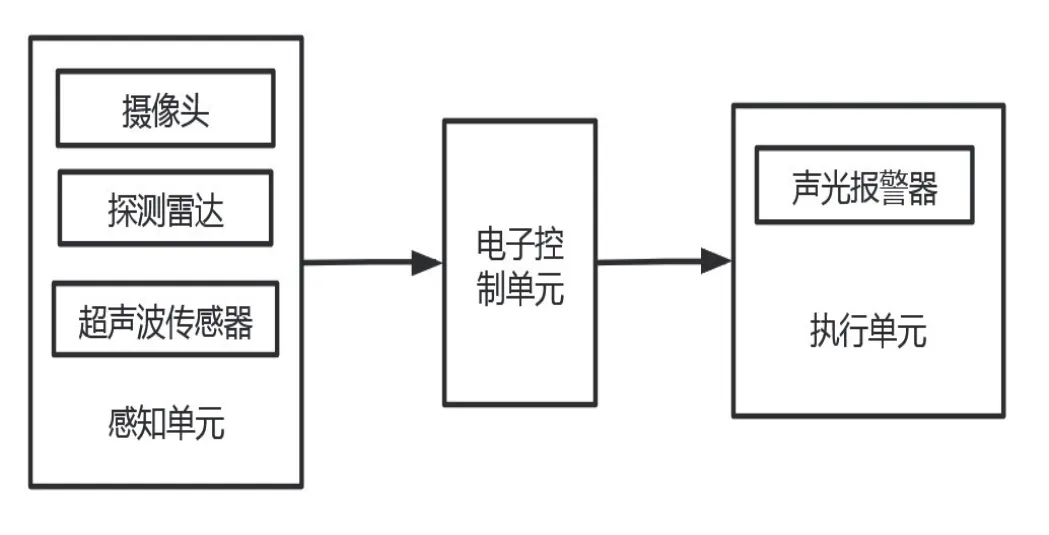
圖2 車輛盲區監測系統的組成示意圖
1.感知單元
感知單元目前使用的傳感器主要是攝像頭、探測雷達、超聲波傳感器。感知單元的主要作用是檢測汽車后方視野盲區中是否有行人、自行車以及其他車輛,將感知的信息傳送給電子控制單元,便于后期進行信息判斷及處理。
2.電子控制單元
電子控制單元的主要作用是將感知單元的信息進行處理及判斷,將信號輸出給執行單元。
3.執行單元
執行單元主要由聲光報警器組成。執行單元的主要作用是執行電子控制單元的指令,聲光報警器主要包括顯示裝置和報警裝置,如果檢測到后方存在危險,那么顯示裝置就會在后視鏡上顯示碰撞危險圖標并閃爍提示,報警裝置會發出報警聲來提示駕駛員。
三、車輛盲區監測系統的原理
車輛盲區監測系統的是通過安裝車輛后視鏡或其他位置的傳感器(主要為攝像頭、毫米波雷達等)來檢測后方的車輛、自行車等,電子控制單元對感知單元的數據進行計算及判斷,如果檢測到盲區中有車輛或者自行車,聲光報警器會發出警報,后視鏡上顯示碰撞危險圖標并閃爍提示,部分車型還可以進行緊急制動。
四、車輛盲區監測系統的應用
本文介紹的車輛盲區監測系統的示意圖如圖3所。凱酷的車輛盲區監測系統主要由安裝在左右兩個后視鏡上面的毫米波雷達完成,該毫米波雷達使用24GHz的毫米波雷達,該毫米波雷達可探測最遠距離大約為50m,探測的角度約為30°,可識別高度為50cm以上的物體。毫米波雷達可以感知后方來到的車輛、自行車等移動物體,電子控制單元可以計算移動物體和當前車輛的相對速度,如果相對速度大于系統設定的閾值,則此時車輛盲區監測系統啟動,車輛外后視鏡指示燈常亮。若此時駕駛員試圖變更車道到危險車道,此時車輛外后視鏡指示燈會閃爍,警報蜂鳴器發出報警聲音提示駕駛員有碰撞危險(圖4)。
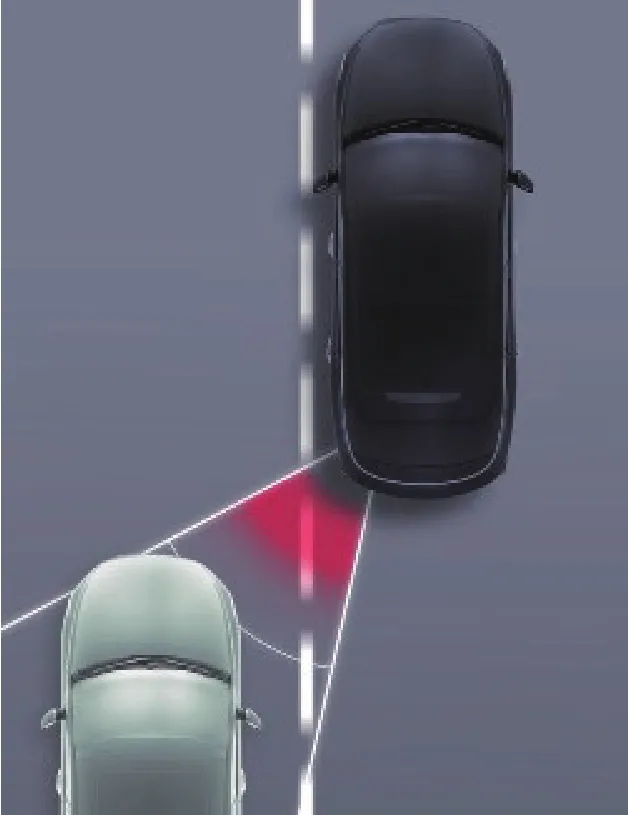
圖3 凱酷汽車的車輛盲區監測系統示意圖

圖4 凱酷盲區監測系統功能實拍圖
如果駕駛員仍然進行變道,凱酷會啟動緊急制動系統,及時對車輛進行制動并調整車輛當前的運動方向,其功能示意圖如圖5和6所示。
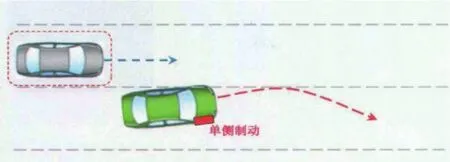
圖5 后方來車單側制動示意圖

圖6 側方來車單側制動示意圖
除此之外,凱酷在兩側的后視鏡中還搭載了兩個攝像頭,這兩個攝像頭是凱酷盲區顯示系統(Blind-Spot View Monitor,BVM)的感知傳感器。該攝像頭使用全方位側攝像頭,可顯示后方約100m的圖像,圖像顯示效果較為清晰。其系統攝像頭圖如圖7所示。

圖7 凱酷盲區顯示系統攝像頭圖
根據駕駛者開啟轉向燈的方向,將該方向后側方影像顯示在凱酷的12.3英寸儀表盤上,提高整車的駕駛便利性。儀表顯示圖如圖8和圖9所示:
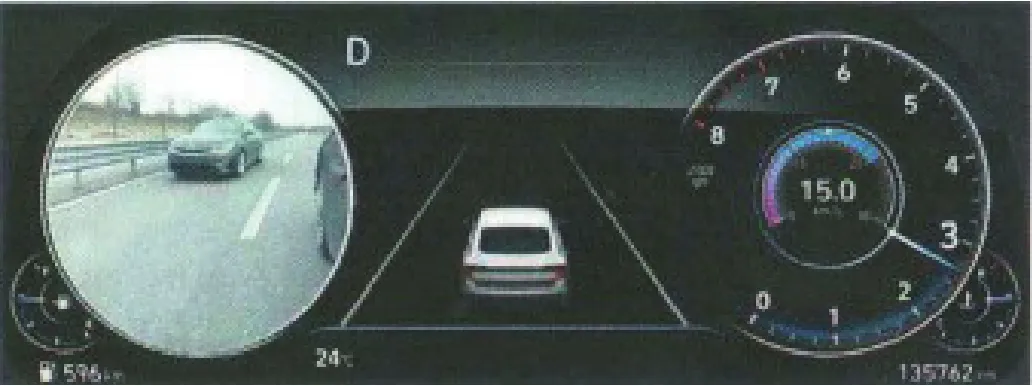
圖8 左側盲區儀表顯示圖
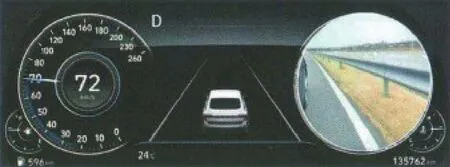
圖9 右側盲區儀表顯示圖
北美國家汽車的后視鏡一般采用平鏡,視野角為15°,中國汽車的后視鏡采用曲鏡,視野角約為25°。搭載了盲區顯示系統的凱酷的視場角可達到50°,大幅改善了原有后視鏡的盲區部分,可以消除駕駛者對盲區的不安感,是一項較為實用的配置。其視野視角圖如圖10所示。

圖10 盲區顯示系統視野角和視場角示意圖
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
數學小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
當代貴州(2019年41期)2019-12-13 09:28:56
家庭影院技術(2017年9期)2017-09-26 03:41:45
公民與法治(2016年4期)2016-05-17 04:09:26
中國共青團(2015年7期)2015-12-17 01:24:38
