果園懸掛式柔性對靶噴霧裝置研制與試驗
2022-02-07 00:54:18陳澤鴻陳建澤宋淑然孫道宗
農業工程學報 2022年18期
陳澤鴻,陳建澤,宋淑然,3,4,孫道宗,3,4
果園懸掛式柔性對靶噴霧裝置研制與試驗
陳澤鴻1,陳建澤2,宋淑然1,3,4※,孫道宗1,3,4
(1. 華南農業大學電子工程學院,廣州 510642;2. 廣東利元亨智能裝備股份有限公司,惠州 516000;3. 廣東省農情信息監測工程技術研究中心,廣州 510642;4. 國家柑橘產業技術體系機械化研究室,廣州 510642)
為減少農藥飄移損失,保護生態環境,該研究從提高噴霧有效性和降低噴霧裝置對果樹枝葉的機械性損傷出發,研制了一種懸掛式柔性對靶噴霧裝置。該裝置以東方紅MS-304拖拉機為載體,采用超聲波傳感器探測樹冠位置,利用霍爾傳感器構建測速模塊。對株距4.0 m、樹高1.6 m、樹冠直徑1.4 m的橘樹進行對靶噴霧試驗驗證懸掛式柔性對靶噴霧裝置作業性能。試驗結果表明:拖拉機行駛速度為0.5 m/s時,噴霧壓力0.4、0.5及0.6 MPa對應的平均藥液附著率分別為84.7%、91.7%、88.9%,藥液附著率較高且接近,噴霧壓力對藥液附著率的影響不明顯;拖拉機行駛速度為1.0 m/s時,噴霧壓力0.4、0.5和0.6 MPa對應的平均藥液附著率分別為64.2%、70.3%、75.8%,噴霧壓力越大,藥液附著率越高;拖拉機行駛速度為 1.5 m/s時,平均藥液附著率低于50%,且噴霧飄移較為嚴重,不適宜進行自動對靶噴霧;拖拉機行駛速度和噴霧壓力相同時,藥液附著率按樹冠上、中、下層順序呈遞減規律,且速度越高,遞減規律越明顯。研究結果對提高果園對靶噴霧的藥液附著率具有較好的實用價值。
植保機械;果園;對靶噴霧;柔性;超聲波測距;附著率
0 引 言
水果已成為中國繼糧食和蔬菜后第三大種植產業[1]。但果園植保難題尚未解決,果園植保主要依靠噴施農藥進行化學防治,隨著農藥的廣泛使用,出現了農藥殘留、環境污染、損害人身安全等一系列負面問題。其主要原因在于國內植保機械作業效率較低、施藥技術落后,農民勞動強度過大,導致農藥的有效利用率低于30%[2-3]。要解決以上問題,就需要讓農藥盡可能多地噴施在果樹上,流失在其他區域的農藥最少[4],即實現精準施藥。精準施藥技術就是結合自動化與噴霧技術,實現果園噴霧機自動識別靶標,減少靶標間隙處的農藥浪費,在減少農藥使用量的同時提高農藥利用率,避免農藥在環境中殘留[5-6]。
早在20世紀80年代,國內許多研究單位已先后成功研制出了牽引式、半懸掛式風送噴霧機,不僅作業效果好,且價格易于果農接受[7-9]。近年來,國內外更有不少研究人員從各角度出發進行自動化對靶噴霧研究與試驗[10]。
針對靶標檢測問題,許多學者利用實時傳感器技術,根據采集到的樹冠圖像、激光、超聲波以及紅外光信號,判斷果樹形狀、位置,進而控制噴頭響應位置與電磁閥啟閉動作,建立針對果樹樹冠的對靶噴霧系統或基于樹冠形狀的仿形噴霧系統[11-15]。李井祝等利用激光測距傳感器探測噴霧機與靶標之間的距離,PLC根據其反饋的距離數值判斷靶標是否存在進而控制噴頭啟閉動作[16];對于傳統數字電路式紅外靶標探測器發功功率小、發光強度低等問題,基于模擬正弦調制的紅外靶標探測系統能夠很好地解決,采用模擬調制解調電路來代替數字編碼解碼電路,使靶標反射更多紅外光,從而提高紅外探測系統整體性能[17];同樣,為解決紅外靶標探測系統易受光照影響、探測距離近、工作不穩定等問題,可通過集成電路實現紅外光信號脈沖編碼與解碼,在紅外發射管與接收頭處加裝凸透鏡,改善光束分布[18];還有許多研究人員將機器視覺與圖像處理技術結合,對作物靶標與土壤背景進行分割以實現靶標識別[19-24]。
在對靶噴霧控制研究方面,如何利用噴霧機延時噴霧來補償系統響應時間是對靶噴霧成功與否的關鍵問題。針對該問題,有學者采用自適應延時法補償系統響應時間,通過EDA仿真軟件(Proteus)比較單片機采用M法、T法對地速傳感器(TGSS)信號計算的誤差大小,將TGSS信號頻率與噴霧機速度進行擬合,設計了自適應延時噴霧模型[25];為避免激光傳感器因激光光束較細導致的將樹冠內空洞、枝間間隙等誤判為果樹間空隙而出現的電磁閥頻繁啟閉動作,國內研究者采用連續3次檢測靶標判別法設計了履帶自走式自動對靶噴霧系統,并通過動態靶標識別間距試驗,確定噴霧機提前與延后噴霧距離[26];此外,還有不少學者利用高壓靜電裝置對噴頭施加電壓,在噴頭與靶標作物之間建立靜電場,使農藥霧滴在靜電力與其他外力共同作用下定向運動,實現對靶噴霧[27-30]。
已有對靶噴霧研究采用的每種技術都各有優缺點。其中大部分對靶噴霧裝置的噴霧機構都是固定的,無法根據靶標探測結果進行移位[31],遇到不規則樹體時,噴霧裝置會損傷靶標果樹。為此,本文提出一種懸掛式柔性對靶噴霧裝置,并該裝置進行田間對靶噴霧試驗,以提高果園對靶噴霧的藥液沉積率。
1 懸掛式柔性對靶噴霧試驗平臺
懸掛式柔性對靶噴霧裝置以東方紅MS-304拖拉機為搭載平臺,采用三點懸掛機構將噴霧架搭載在拖拉機后側。拖拉機外形尺寸為3.6 m×1.5 m×1.6 m,其動力輸出最大功率為17.78 kW,額定牽引力為6.7 kN。裝置各模塊在拖拉機上的安裝位置如圖1所示,包括超聲波靶標檢測模塊、主控制器、測速模塊、電磁閥控制模塊。與現有大部分對靶噴霧裝置相比,主控制器作為協調核心,采用無線通信與另外3個模塊進行數據傳送,如圖1中虛線表示,可減少拖拉機上的復雜布線,提高通信可靠性。
噴霧架結構如圖2所示,總質量約為200 kg,主要包括承重架、升降導軌、升降架、一級展臂、二級展臂、吊掛噴桿、倒Y 型噴頭支架和噴頭。其中,承重架的長寬高尺寸為850 mm×700 mm×1 200 mm,分為上下兩層,上層放置一個容量為450 L的藥液箱,下層安裝流量為135 L/min的隔膜泵;升降架上的軸承嵌入升降導軌內,通過調節手柄和滑輪組可上下調節噴霧臂,整個水平藥液管道的總質量約為100 kg,具有約為1 000 N的重力,調節手柄的杠桿比例為5∶1,結合動滑輪組在理想情況下僅需使用約50 N的拉力即可調節升降架;升降架、一級展臂和二級展臂共同組成噴霧臂并可二次折疊,便于移動和運輸;水平噴霧臂總長度為8.7 m,可適應多種果樹種植行距,可調節高度為1.5~2.2 m;為增大噴幅,同時減少藥液流失,選用霧錐角為110°、孔徑小、低流量、噴霧幾何形狀為扇形的德國Lechler公司的TR110-015噴頭,壓力范圍0.2~2.0 MPa;噴霧臂左右兩側的倒Y型噴頭支架上安裝4個噴頭,用于對樹冠頂部進行噴霧;吊掛噴桿長度為1.2 m,在水平方向上2個倒Y型噴頭支架和4個吊掛噴桿在初始安裝點兩側0.5 m范圍內可調;噴霧時,在拖拉機前進方向上,兩側門型噴霧結構的吊掛噴桿與倒Y型噴頭可同時以掃場的方式對樹冠直徑小于2 m,高度小于2 m的左右兩排果樹進行圍繞噴霧;吊掛噴桿與噴霧臂之間使用雙十字萬向節進行柔性連接,吊掛噴桿可以多角度多方向自由轉動,噴桿末端與噴頭之間使用柔性噴霧軟膠管連接。由于萬向節可自由擺動且噴霧軟管為柔性,當果樹阻礙噴桿行進時,吊掛噴桿可柔性繞開,降低對果樹的損害,從而實現柔性噴霧。

2 對靶噴霧裝置
對靶噴霧裝置主要包括主控制器、超聲波靶標檢測模塊、拖拉機在線測速模塊和電磁閥控制模塊。其中主控制器為協調核心,負責與另外3個模塊進行數據傳輸。
2.1 主控制器
主控制器的主要作用是實現超聲波靶標檢測模塊、測速模塊及電磁閥控制模塊電路之間的信息實時互傳。顯示超聲波測距距離、速度、電磁閥開啟狀態等信息,向電磁閥控制模塊發送控制命令,切換“手動”與“自動”模式,兼做人機交互模塊。主控制器的工作流程圖如圖3所示。
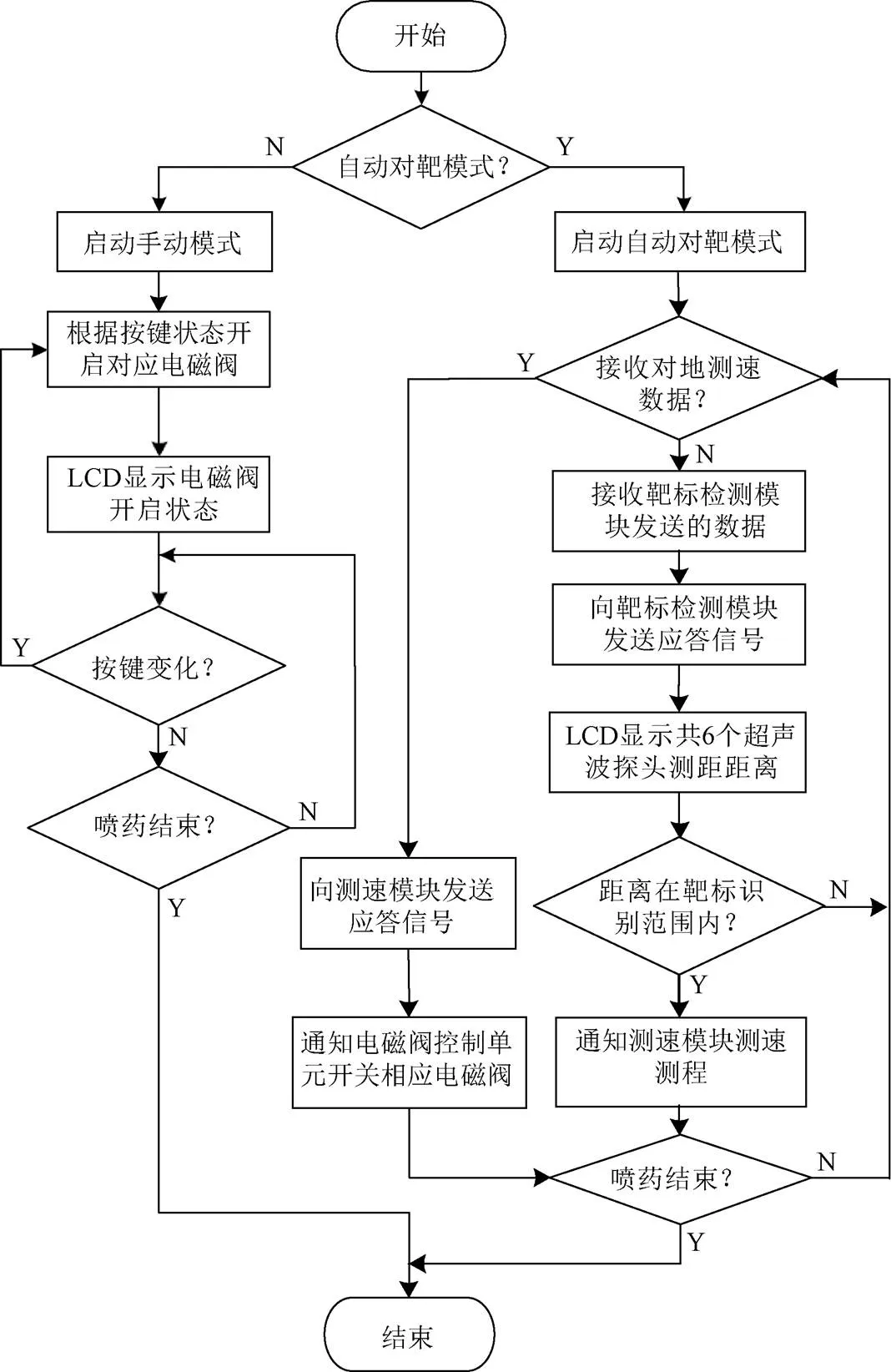
圖3 主控制器工作流程圖
由于數據處理量較大,且實時性要求較高,故該模塊選擇綜合性能較好的STM32F103ZET6處理器。該處理器基于ARM Cortex-M3內核,時鐘頻率可達72 MHz主頻,單周期精簡指令集(RSIC),具有低功耗、高性能的微控制器,在72 MHz主頻下的電流為36 mA,代碼安全性高。
主控制器的控制電路板安裝在電控箱內,電路板由容量為4.4 Ah、供電電壓為DC-12V的鋰電池供電,電控箱長寬高尺寸為40 cm×30 cm×25 cm。為增強無線信號的收發能力,從電控箱內部引出天線,電控箱面板上設計1個電源開關、1個手動與自動模式的切換開關和14個電磁閥獨立控制開關。
預試驗表明,當各模塊同時發送數據時,主控制器會先接收完其中一個模塊所發送的數據后,再接收另一個模塊的數據,不會出現數據交叉的情況。此外,通過為不同模塊分配不同地址碼,接收數據時,先匹配地址碼,即可避免數據沖突。為確保主控制器與其余模塊進行可靠通信,對主控制器模塊進行通信測試:每間隔200 ms,令靶標檢測模塊向主控制器發送特定的數據包,主控制器接收到數據包后回發響應信號,循環發送1 000 次,電腦同步接收并存儲數據包和響應信號,通過對比發送數據與電腦存儲數據計算通信誤碼率;每間隔300 ms,拖拉機測速模塊向主控制器發送特定的數據包,主控制器接收到數據包后回發響應信號,循環發送1 000 次,電腦同步接收并存儲數據包和響應信號,通過對比發送數據與電腦存儲數據計算通信誤碼率。在測試通信可靠性時,先對各模塊進行單獨測試,查看誤碼率,再同時對各模塊進行測試與查看誤碼率。由于200與300的最小公倍數為600,即每間隔600 ms,靶標檢測模塊與測速模塊將有1次幾乎同時發送數據的情況出現,因此特別檢查每間隔600 ms的誤碼率。主控制器與電磁閥控制模塊的通信與響應測試在電磁閥控制模塊部分單獨講述。
經測試,主控制器與超過聲波測距對靶模塊、測速模塊之間的通信誤碼率為0,并且主控制器接收到數據包后能做出正確響應,正確響應率為100%,主控制器能與靶標檢測模塊和拖拉機測速模塊之間進行可靠通信。
2.2 靶標檢測模塊
在拖拉機左右兩側各安裝3個TCF40-16TR1超聲波測距傳感器,其中心頻率為40 kHz,波束角為60°。在垂直方向上將超聲波傳感器按照上、中、下順序進行安裝,分別探測各高度處在水平方向上是否存在靶標。
當超聲波測距傳感器與靶標果樹的水平距離發生變化時,若探測距離增大,則探測范圍也會增大,這將導致拖拉機向前行駛時提前對非靶標物體錯誤觸發噴霧或者錯誤觸發不同冠層高度下的噴頭噴霧,造成農藥浪費。故本文將超聲波傳感器放在套筒內,傳感器探頭與套筒外沿距離20 mm,以削弱超聲波傳感器在波束中軸線以外方向上的超聲波能量,達到增強傳感器方向性的目的。超聲波傳感器固定架置于拖拉機最前方,與噴霧架之間的水平距離為4.1 m,各超聲波測距傳感器的安裝如圖4a所示。
在同一個果園中,果樹品種、生長環境及樹齡、高基本一致。選取3棵樹高約為1.6 m,樹冠直徑約為1.4 m的橘樹,將樹冠均勻分為上、中、下3層,超聲波傳感器固定架上的上層、中層、下層分別與樹冠的上層、中層、下層一一對應,如圖4b所示。當果樹樹冠高度變化時,手動調整定位架上傳感器與束波套筒的高度,使各超聲波傳感器與樹冠各層對應,并通過調節手柄與滑輪組上下調節噴霧臂實現對靶噴霧。
在自動對靶裝置中,靶標識別間距直接影響裝置對靶標的正確識別,因此對該對靶噴霧裝置的靶標識別間距進行測試,靶標識別間距包括靜態靶標識別間距和動態靶標識別間距。

注:U1為右上層超聲波測距傳感器,U2為右中層超聲波測距傳感器,U3為右下層超聲波測距傳感器。
Note:U1is upper right ultrasonic ranging sensor, U2is right middle layer ultrasonic ranging sensor, U3is lower right ultrasonic ranging sensor.
圖4 靶標檢測單元示意圖
Fig.4 Schematic diagram of target detection unit
靜態靶標識別間距測量試驗以右中層超聲波測距傳感器為代表,在室外水泥平地上進行。在2塊尺寸為400 mm×600 mm的KT板上粘貼橘樹枝葉用于模擬2棵靶標果樹,將其固定在支架上,KT板中心位置距離地面1.2 m,中心位置與超聲波測距傳感器中軸線對齊。拖拉機靜止,超聲波測距傳感器中心線垂直于靶標所在平面,傳感器仰角為0°。試驗時,設傳感器與靶標水平距離在0~2.5 m范圍內每間隔0.5 m設置一個測點。測試時,先將左側靶標從左端緩慢向超聲波測距傳感器中軸線靠近,當在電腦中初次觀察到有效測距數據時,則判斷為探測到靶標,記錄靶標位置為D1點,再將右側靶標按同樣方式從右端緩慢向超聲波測距傳感器中軸線移動,記錄探測到靶標的D2點,D1與D2的間距即為超聲波測距傳感器的靜態靶標識別間距,試驗重復3次,以3次測試的平均值作為最終測試結果。
測試結果如表1所示。超聲波傳感器靜態靶標識別間距隨探測距離增加呈先增大后減小的趨勢,是由于波束遠距離傳播后波束能量減少而引起。靜態靶標識別間距的最小值105 mm出現在距靶標最近距離0.5 m處,最大值270 mm出現在距靶標2.0 m處。

表1 靜態靶標識別間距測試結果
探測范圍小于3 000 mm,超聲波對靶裝置的數據處理周期小于50 ms。根據技術文檔,電磁閥勵磁時間為50 ms,為了給電磁閥足夠的勵磁時間,設其勵磁時間為80 ms。在試驗樣機上,超聲波傳感器與噴霧臂之間距離為4.1 m。在探測到靶標后,可以對電磁閥的響應時間、各裝置的數據處理時間進行足夠的時間補償,且超聲波靶標檢測模塊與電磁閥控制模塊工作時相互獨立,故取二者中工作周期較長的作為動態靶標識別間距的最大識別周期,即80 ms。則拖拉機在1 m/s行駛速度下,噴霧裝置理論識別間距為80 mm。裝置的理論動態靶標識別間距為理論值80 mm與靜態靶標識別間距之和,結合表 1可知,拖拉機在1 m/s行駛速度下,對應的理論動態靶標識別間距如表2所示。

表2 行駛速度為 1 m·s-1時的理論動態靶標識別間距
實際果園中樹冠之間的間隙一般大于1 000 mm,由表2可知,拖拉機行駛速度為1 m/s時,超聲波靶標檢測模塊的理論動態靶標識別間距最大值為350 mm,遠小于1 000 mm。預試驗中,橘樹株距4.0 m、樹冠直徑1.4 m,樹冠之間的間隙為1 200 mm,遠大于350 mm,故該對靶噴霧裝置可在果園中進行自動對靶噴霧試驗。
2.3 拖拉機在線測速模塊
為研究對靶噴霧裝置噴霧效率與拖拉機行駛速度之間的關系,設計拖拉機在線測速模塊以實現拖拉機行駛速度的實時測量。當超聲波傳感器靶標識別狀態發生變化時,開始計算拖拉機行進路程,當拖拉機的行進距離等于超聲波傳感器與噴霧臂之間的距離時,主控制器控制電磁閥打開,控制噴頭開啟,進行對靶噴霧。
測速模塊包括CHE18-15N11-H710霍爾傳感器、ATmega16處理器、ZigBee無線通信模塊以及釹鐵硼磁鐵(又稱永磁王)。拖拉機輪轂直徑為590 mm,周長約為1 854 mm,輪輞較平整部分寬度為20 mm,為增強磁場,選用長寬高為20 mm×15 mm×5 mm的釹鐵硼磁鐵,為提高測試精度,在輪輞每隔15 mm處安裝一塊磁鐵,共安裝61塊磁鐵,磁鐵安裝實物圖如圖5a所示。由于霍爾傳感器對磁鐵N極更為敏感,故將磁鐵N極朝向霍爾傳感器探頭,霍爾傳感器具體安裝位置如圖5b所示。


a. 磁鐵安裝實物圖a. Physical drawing of magnet installationb. 霍爾傳感器安裝實物圖b. Physical drawing of Hall sensor installation
1.輪輞 2.霍爾傳感器探頭 3.磁鐵
1.Rim 2.Hall sensor probe 3.Magnet
圖5 測速裝置安裝實物圖
Fig.5 Physical drawing of speed measuring device installation
霍爾傳感器探頭固定于離磁鐵N極表面5~10 mm的位置上,利用霍爾傳感器檢測拖拉機輪輞磁性強弱變化而輸出脈沖信號,再根據單位時間內的脈沖數計算拖拉機實時行駛速度。由于拖拉機在地面較為平整的果樹行間行駛,且不需要深耕作業,滑轉率不超過0.1[32],可忽略不計。
速度計算公式為

式中為拖拉機實時行駛速度,m/s;為實時脈沖數;為輪胎轉一圈的行駛距離,cm;為數據掃描頻率,Hz;為車輪轉一圈對應的脈沖數。
為測試該測速裝置的測速準確率,在試驗果園進行拖拉機測速試驗。每次試驗用秒表測量拖拉機行駛30 m所用時間,計算出平均速度作為速度真值v,最后將實時測量速度v與該速度真值進行比較。為驗證測速模塊低速行駛時的測速準確性,分別在0.5、1.0、1.5和2.0 m/s共4個行駛速度下進行測速試驗,每個行駛速度進行3次試驗,再分別對4個行駛速度的試驗結果取平均值,最后根據式(2)計算拖拉機測速準確率。

式中v為速度真值,m/s;v為速度測量值,m/s。
經分析,在上述速度范圍內,在線測速裝置的測速準確率在98%以上,滿足懸掛式柔性對靶噴霧裝置的測速精度與穩定性要求。
2.4 電磁閥控制模塊
本設計中,電磁閥控制有手動模式和自動模式,電磁閥直接與噴頭連接,能否可靠控制電磁閥開關,是影響對靶噴霧穩定性的關鍵。對靶噴霧裝置正常工作時管道壓差大于0.3 MPa,考慮到開關頻率較高,工作時間較短,選用直動式電磁閥。電磁閥內部介質流通孔的等價直徑為通徑,通徑越大,流通能力就越大。對吊掛噴桿上的單噴頭體使用通徑為6.36 mm的電磁閥,倒Y型噴頭支架的4個噴頭由一個通徑為12.72 mm的電磁閥單獨控制,電磁閥選用金通V2A102-03和PU225-04A,功率分別為13和23 W,采用DC-24V高能鋰電池供電。處理器與無線通信模塊的電源電壓為3.3 V,采用金升陽DC-DC模塊將DC-24V轉成5 V,再由AMS31117-3.3降壓穩壓得到3.3 V。
電磁閥控制模塊共安裝14個電磁閥,其中倒Y型噴頭支架處4個噴頭開關的電磁閥功率為23 W,所需工作電流約為1 A,根據場效應管(MOS管)開關速度快、驅動電流大等優點,選用N溝道增強型MOS管IRF540N作為開關元件。
為測試電磁閥控制模塊能否準確響應,將拖拉機啟動并固定在試驗果園中,用KT板遮擋超聲波傳感器,觀察電磁閥能否正確控制噴頭進行噴霧,判斷電磁閥是否準確響應,每層測試5次,共測試30次。經測試,所有電磁閥均能準確響應,響應時間約為50~70 ms。試驗中,主控制器、靶標檢測裝置、電磁閥控制裝置等響應時間共約為132.5 ms,當靶標檢測模塊最初探測到靶標存在時,主控制器根據拖拉機實時行駛速度及超聲波傳感器與噴霧臂之間的距離,計算出拖拉機待行走時間,減去總響應時間132.5 ms,得到電磁閥待啟動時間。
3 對靶噴霧試驗
3.1 試驗儀器與設備
試驗儀器包括標智BENETECH GM8902數字風速儀(分辨率為0.01 m/s,用于測量周圍環境風速);60 mm×40 mm霧滴采樣標簽紙,面積與一般橘葉面積相當;美國雙杰集團有限公司的電子天平秤(用于稱量染色劑,精度為0.01 g);紅利來TCS-500電子臺秤(用于稱量染色溶液,分辨率為0.01 kg);根據《JB/T 9782—2014》選用誘惑紅染色劑配置染色溶液[33],誘惑紅染色劑產自上海染料研究所有限公司;數碼顯微鏡(放大倍率為1~300,影像解析度為1 600×1 200);鍍鋅管架(用于觀測靶標間隙處的霧滴附著情況);為便于試驗布置,達到噴霧裝置水平噴霧臂長度要求,采用仿真橘樹L、仿真橘樹R、真實橘樹T,其中2棵仿真橘樹均產自廣州市慶緣景觀園林設計有限公司,3棵橘樹樹高均為1.6 m,樹冠直徑均為1.4 m;設計一種定位卡紙,定位卡紙上有3個1 cm×1 cm的正方形方格,查定時將卡紙覆蓋在標簽紙上方,觀察方格中的霧滴,進而計算每平方厘米上的平均霧滴數。
3.2 試驗方案
為驗證懸掛式柔性對靶噴霧裝置作業性能,對噴霧裝置進行噴霧試驗,研究不同拖拉機行駛速度與噴霧壓力下的藥液附著情況。考慮到研制的噴霧裝置各個部件能承受的壓力范圍,設定了進行試驗時噴霧壓力范圍為0~0.8 MPa,根據所選噴頭,采用低量自動對靶噴霧方式,最終設定工作壓力為0.4、0.5和0.6 MPa三個水平,對應流量范圍為0.68~0.83 L/min。結合低量自動對靶噴霧方式,設計行駛速度為0.5、1.0和1.5 m/s三個水平,各因素進行全因子試驗。
依據標準《JB/T 9782—2014》,根據樹冠冠幅大小按比例在每棵橘樹樹冠的上、中、下層平面內均勻布置10個采樣點,與圖4b各層傳感器高度對應,樹冠上、中、下層采樣平面分別距離地面150、105和60 cm。將霧滴采樣標簽紙布置在采樣點處承接藥液,以樹冠中層為例,霧滴采樣標簽紙在樹冠截面上布置方案如圖6a所示,圖 6b為橘樹采樣標簽紙布置實物圖。
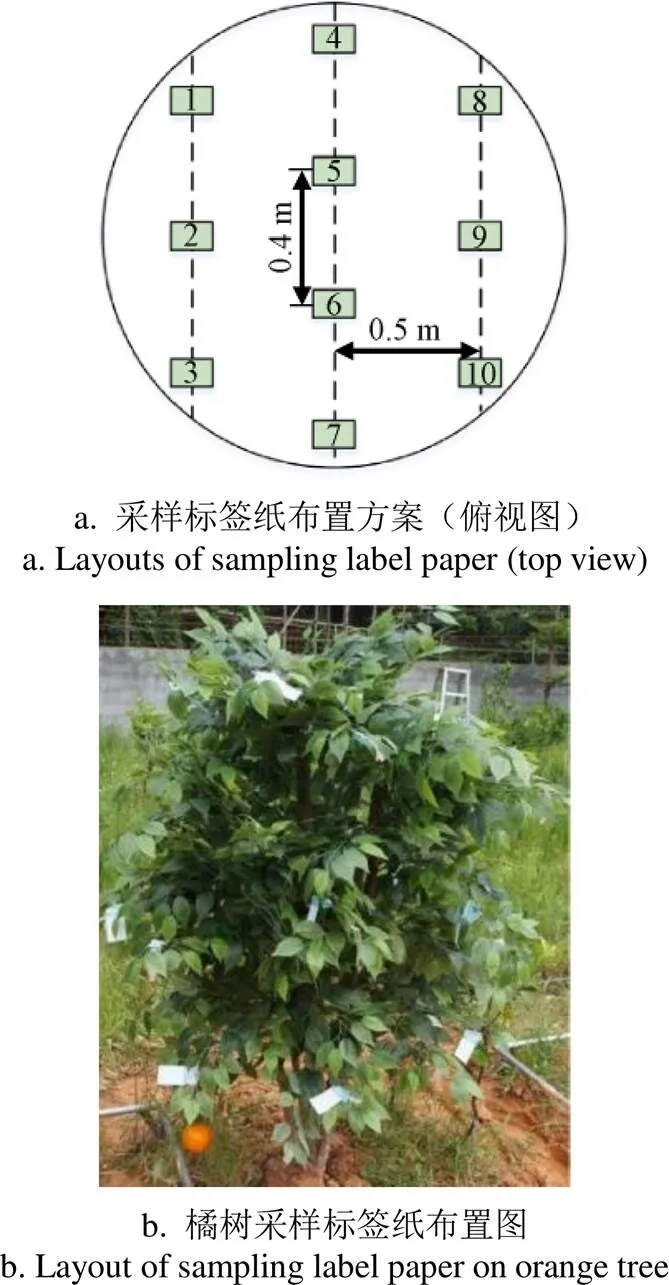
注:1~10為采樣點。
由于霧滴采樣標簽紙正反面均能承接霧滴,選擇其中一面左上角進行標記,在每個植株上、中、下層各設10個采樣點并標記編號。
3.3 對靶噴霧藥液附著率試驗
試驗開始前,使用電子天平(精度為0.01 g)稱取20.00 g誘惑紅染色劑,再使用電子臺秤(精度為0.01 kg)稱取100.00 kg清水,將染色劑倒入清水中,配置成1∶5 000的誘惑紅染色液。
試驗以仿真橘樹L、仿真橘樹R、真實橘樹T為對象,橘樹的分布情況如圖7a所示,現場試驗如圖7b所示。將鍍鋅管架并排放置于靶標間隙處;使用長尾夾將采樣標簽紙固定在橘樹指定位置;根據試驗因素與水平,將拖拉機油門固定在某一位置,經多次調試使速度穩定在設置水平;調節壓力使當前拖拉機噴霧壓力達到設置水平;使用風速儀測量周圍環境風速,待室外風速小于0.2 m/s時,拖拉機開始行進噴霧。拖拉機行進過程中,對靶噴霧裝置在超聲波測距檢測靶標的同時檢測拖拉機的行駛速度,再向電磁閥驅動電路發送命令,控制噴頭的開啟與關閉,進行對靶噴霧。當拖拉機完全駛過所有橘樹且對靶噴霧自動停止后,試驗結束。
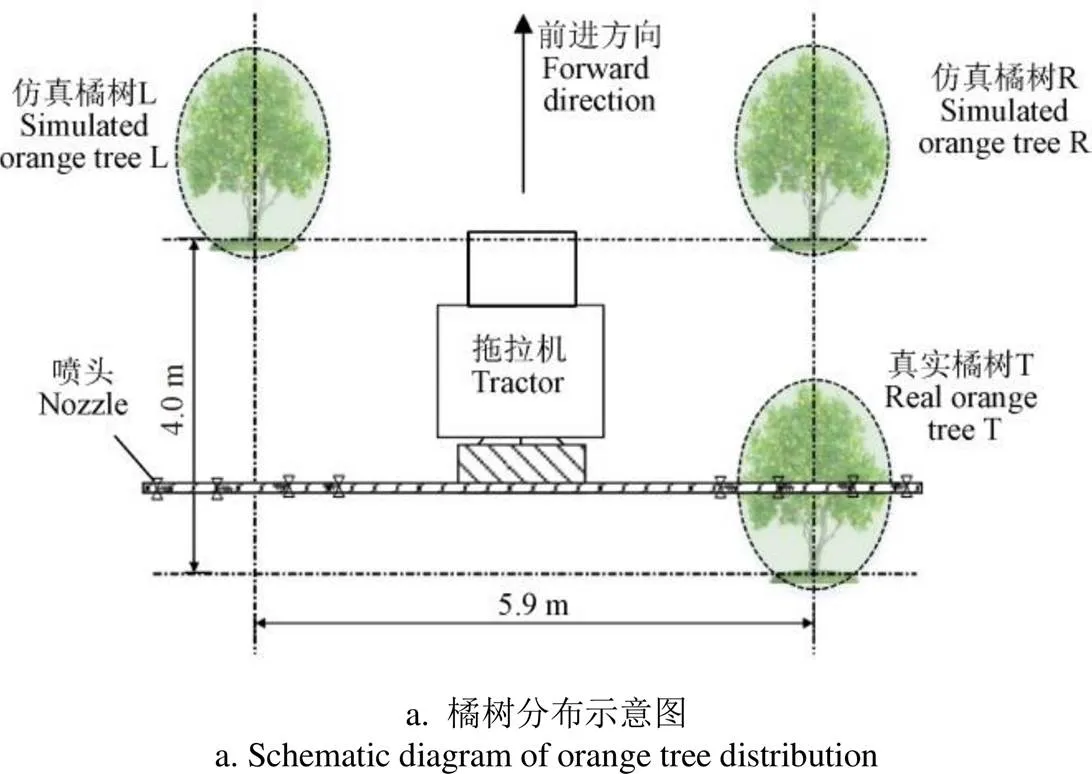
1.噴霧軟膠管 2.噴頭 3.吊掛噴桿 4.電磁閥 5.雙十字萬向節 6.升降導軌 7.升降架 8.一級展臂 9.二級展臂 10.倒Y型噴頭支架
1.Spray hose 2.Nozzle 3.Hanging spray bar 4.Solenoid valve 5.Double cross universal joints 6.Lifting guide rail 7.Lifting frame 8.Primary boom 9.Secondary boom 10.Inverted Y-type nozzle bracket
圖7 對靶噴霧試驗
Fig.7 Targeted spray test
4 試驗結果與分析
試驗結束后,待采樣標簽紙風干,收集采樣標簽紙,查定時將定位卡紙置于標簽紙上使二者重合,用數碼顯微鏡對定位卡紙上3個方格中的霧滴進行放大并統計霧滴數,計算每平方厘米上的平均霧滴數,得到藥液附著密度。
根據《JB/T 9782—2014》,將查定后的霧滴采樣標簽紙進行分級:無效0級(無藥液附著)、有效1級(藥液附著面積為觀察面積的>0~1/4)、有效2級(藥液附著面積為觀察面積的>1/4~1/2)、有效3級(藥液附著面積為觀察面積的>1/2~3/4)、有效4級(藥液附著面積為觀察面積的3/4以上),分級完成后,根據式(3)計算葉面與葉背的藥液附著率。

式中1為有效1級葉片數;2為有效2級葉片數;3為有效3級葉片數;4為有效4級葉片數;為觀察葉片總數。
試驗結果如表3所示。試驗結果統計發現拖拉機行駛速度為1.5 m/s時,不同壓力下藥液附著情況普遍較差,只有樹冠上層葉面的藥液附著率超過50%,且試驗中噴霧飄移現象嚴重,因此該速度下不宜進行對靶噴霧作業。
此外,在進行田間噴霧試驗時,在地面鍍鋅管架上觀察了藥液附著情況,發現藥液附著面積為觀察面積的1/4以下,根據《JB/T 9782—2014》,將其視為無效噴霧。
由表3可知,拖拉機行駛速度為0.5 m/s時,噴霧壓力0.4、0.5和0.6 MPa對應的平均藥液附著率分別為84.7%、91.7%、88.9%,藥液附著率較高且接近,即該試驗速度下噴霧壓力對藥液附著率無較大影響,故建議在0.5 m/s的速度下行駛時,應當選擇較低噴霧壓力進行噴霧,以減少藥液損失;速度為1.0 m/s時,噴霧壓力0.4、0.5和0.6 MPa對應的平均藥液附著率分別為64.2%、70.3%、75.8%,均低于0.5 m/s的平均藥液附著率,噴霧壓力對藥液附著率影響較大,噴霧壓力越大,藥液附著率越高,故建議在1.0 m/s的速度下,應當使用較高噴霧壓力提高藥液附著率;在0.5與1.0 m/s的行駛速度下,葉背的平均藥液附著率大部分低于30%,遠低于葉面的藥液附著率,其根本原因是該懸掛式柔性對靶噴霧非風送式對靶噴霧,大部分藥液經噴霧架噴施后在重力作用下沉降在葉片表面,只有小部分藥液在環境風力等作用下附著在葉背;藥液附著率在樹冠上、中、下層呈遞減規律,且在拖拉機較高速行駛時,藥液附著率遞減規律尤為明顯,原因在于除噴霧架上的吊掛噴桿對水平方向的樹冠各層進行噴施以外,樹冠上層與倒Y型噴頭支架之間距離較近且無遮擋,故樹冠上層噴霧效果最好,而樹冠中、下層在垂直方向上受到不同程度遮擋,噴霧效果受到不同程度影響,此外,拖拉機行駛速度越大,噴霧飄移情況越嚴重,藥液附著率遞減規律越明顯。
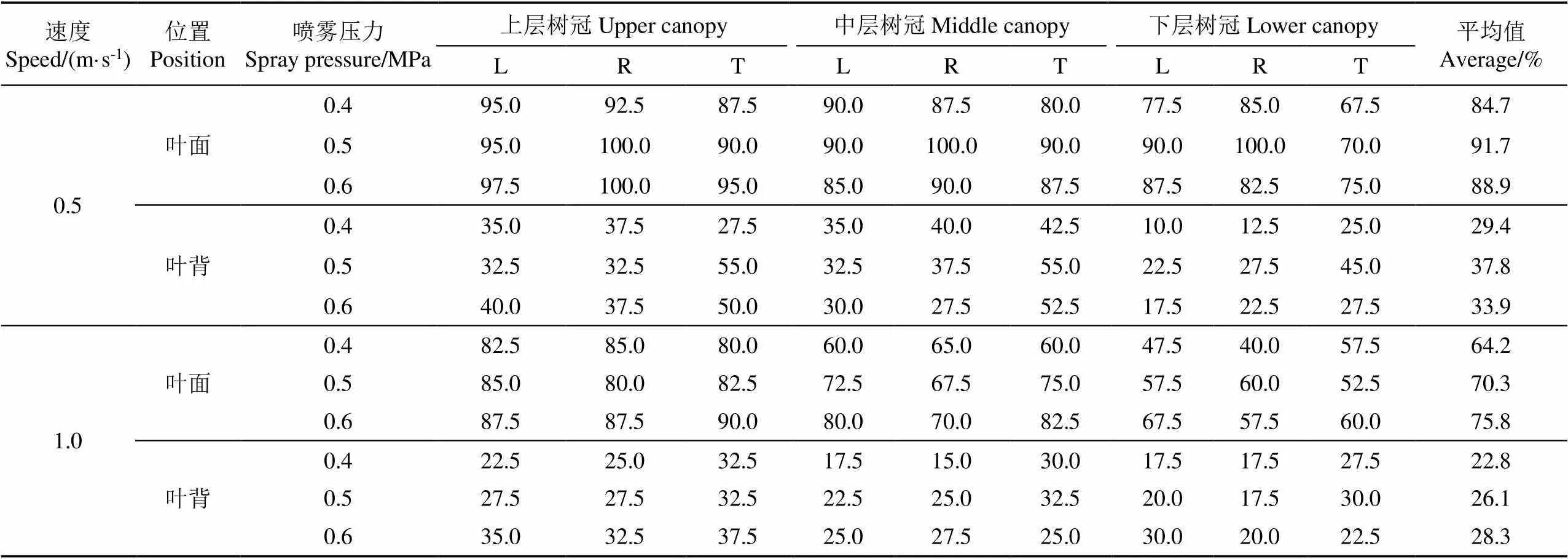
表3 不同行駛速度與噴霧壓力下的藥液附著率
5 結 論
本文設計了懸掛式柔性對靶噴霧裝置通過不同噴霧作業參數下的藥液附著率試驗,得出以下主要結論:
1)在拖拉機行駛速度為0.5 m/s時,噴霧壓力0.4、0.5和0.6 MPa對應的平均藥液附著率分別為84.7%、91.7%、88.9%,藥液附著率較高且接近,建議選擇較低噴霧壓力,減少藥液流失;行駛速度為1.0 m/s時,噴霧壓力0.4、0.5和0.6 MPa對應的平均藥液附著率分別為64.2%、70.3%、75.8%,噴霧壓力對藥液附著率影響較大,建議選擇較高噴霧壓力,提高藥液附著率。
2)拖拉機行駛速度為1.5 m/s時,藥液附著情況較差,噴霧飄移現象較為嚴重,故該對靶噴霧裝置不適宜在此行駛速度下進行對靶噴霧試驗,今后如需在此行駛速度下進行試驗,可結合風送式對靶噴霧技術來實現。
3)藥液附著率在樹冠上、中、下層呈遞減規律,隨著拖拉機速度增大,遞減規律越明顯。
4)噴霧試驗表明,在0.5與1.0 m/s的行駛速度下,葉背的平均藥液附著率大部分低于30%,遠低于葉面的藥液附著率,故該裝置暫不適用于對葉背藥液附著率要求高的果樹進行噴霧。
該果園柔性對靶噴霧裝置能同時對2行果樹進行對靶噴霧,田間藥液附著率試驗中所測得的結果符合實際果樹對噴霧有效性的需求。與現有大部分對靶噴霧裝置的噴霧機構相比,所設計的柔性噴霧機構可在樹冠遮擋門型噴霧架前進時,吊掛噴桿被動式柔性通過果樹冠層,降低了對果樹的損害;樹冠分層靶標識別裝置采用無線通信方式傳輸靶標識別信息,減少了拖拉機上的復雜布線,提高了通信可靠性。
當果園中種植的果樹生長情況較一致時,在噴霧作業前應調整好噴霧臂高度及定位架上各放置傳感器的束波套筒之間的垂直距離;對于果樹生長情況差異較大的果園,可適當改變超聲波測距傳感器與束波套筒邊沿的距離,或是考慮增加傳感器數量,進一步調整探測范圍。
[1] 喬金亮. 農業部:2020年果園面積要穩定在2億畝[R]. 農村經濟與科技:農業產業化,2016:11-16.
[2] 何雄奎. 植保精準施藥技術裝備[J]. 農業工程技術,2017,37(30):22-26.
He Xiongkui. Precision spraying equipment for plant protection[J]. Agricultural Engineering Technology, 2017, 37(30): 22-26. (in Chinese with English abstract)
[3] 鄭永軍,陳炳太,呂昊暾,等. 中國果園植保機械化技術與裝備研究進展[J]. 農業工程學報,2020,36(20):110-124.
Zheng Yongjun, Chen Bingtai, Lyu Haotun, et al. Research progress of orchard plant protection mechanization technology and equipment in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(20): 110-124. (in Chinese with English abstract)
[4] 鄧敏,邢子輝,李衛,等. 我國施藥技術和施藥機械的現狀及問題[J]. 農機化研究,2014,36(5):235-238.
Deng Min, Xing Zihui, Li Wei, et al. Actuality and problems of pesticide machinery and its application techniques in China[J]. Journal of Agricultural Mechanization Research, 2014, 36(5): 235-238. (in Chinese with English abstract)
[5] 何雄奎. 中國精準施藥技術和裝備研究現狀及發展建議[J]. 智慧農業,2020,2(1):133-146.
He Xiongkui. Research progress and developmental recommendations on precision spraying technology and equipment in China[J]. Smart Agriculture, 2020, 2(1): 133-146. (in Chinese with English abstract)
[6] 劉金龍. 對靶噴霧紅外探測系統的設計與試驗[D]. 南京:南京農業大學,2012.
Liu Jinlong. The Design and Experiment of Infrared Detection System in Target Spray[D]. Nanjing: Nanjing Agricultural University, 2012. (in Chinese with English abstract)
[7] 趙映,肖宏儒,梅松,等. 我國果園機械化生產現狀與發展策略[J]. 中國農業大學學報,2017,22(6):116-127.
Zhao Ying, Xiao Hongru, Mei Song, et al. Current status and development strategies of orchard mechanization production in China[J]. Journal of China Agricultural University, 2017, 22(6): 116-127. (in Chinese with English abstract)
[8] 張海鋒,許林云. 果園噴霧機發展現狀及展望[J]. 中國農機化學報,2014,35(3):112-118.
Zhang Haifeng, Xu Linyun. Summary of research status on orchard sprayer[J]. Journal of Chinese Agricultural Mechanization, 2014, 35(3): 112-118. (in Chinese with English abstract)
[9] 常有宏,呂曉蘭,藺經,等. 我國果園機械化現狀與發展思路[J]. 中國農機化學報,2013,34(6):21-26.
Chang Youhong, Lyu Xiaolan, Lin Jing, et al. Present state and thinking about development of orchard mechanization in China[J]. Journal of Chinese Agricultural Mechanization, 2013, 34(6): 21-26. (in Chinese with English abstract)
[10] 張富貴,洪添勝,王錦堅,等. 現代農藥噴施技術士及裝備研究進展[J]. 農機化研究,2011,33(2):209-213.
Zhang Fugui, Hong Tiansheng, Wang Jinjian, et al. Development of modern pesticide spry technique and equipment[J]. Journal of Agricultural Mechanization Research, 2011, 33(2): 209-213. (in Chinese with English abstract)
[11] 王萬章,洪添勝,李捷,等. 果樹農藥精確噴霧技術[J]. 農業工程學報,2004,20(6):98-101.
Wang Wanzhang, Hong Tiansheng, Li Jie, et al. Review of the pesticide precision orchard spraying technolotgies[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2004,20(6): 98-101. (in Chinese with English abstract)
[12] Nan Y, Zhang H, Zheng J, et al. Research on profiling tracking control optimization of orchard sprayer based on the phenotypic characteristics of tree crown[J]. Computers and Electronics in Agriculture, 2022, 192: 106455.
[13] 南玉龍,張慧春,徐幼林,等. 農林仿形對靶噴霧及其控制技術研究進展[J]. 世界林業研究,2018,31(4):54-58.
Nan Yulong, Zhang Huichun, Xu Youlin, et al. Research progress on profiling target spray and its control technology in agriculture and forestry[J]. World Forestry Research, 2018, 31(4): 54-58. (in Chinese with English abstract)
[14] 李龍龍,何雄奎,宋堅利,等. 果園仿形變量噴霧與常規風送噴霧性能對比試驗[J]. 農業工程學報,2017,33(16):56-63.
Li Longlong, He Xiongkui, Song Jianli, et al. Comparative experiment on profile variable rate spray and conventional air assisted spray in orchards[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(16): 56-63. (in Chinese with English abstract)
[15] 李龍龍,何雄奎,宋堅利,等. 基于變量噴霧的果園自動仿形噴霧機的設計與試驗[J]. 農業工程學報,2017,33(1):70-76.
Li Longlong, He Xiongkui, Song Jianli, et al. Design and experiment of automatic profiling orchard sprayer based on variable air volume and flow rate[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(1): 70-76. (in Chinese with English abstract)
[16] 李井祝,朱鳳武. 基于PLC自動對靶噴霧控制系統的設計與試驗[J]. 中國農機化學報,2017,38(8):55-58.
Li Jingzhu, Zhu Fengwu. Design and experiment of automatic targeting spraying control system based on PLC[J]. Journal of Chinese Agricultural Mechanization, 2017, 38(8): 55-58. (in Chinese with English abstract)
[17] 劉金龍,丁為民,鄧巍. 果園對靶噴霧紅外探測系統的設計與試驗[J]. 江蘇農業科學,2012,40(12):370-372.
Liu Jinlong, Ding Weimin, Deng Wei, et al. Design and experiment of infrared detection system for target spray in orchard[J]. Jiangsu Agricultural Sciences, 2012, 40(12): 370-372. (in Chinese with English abstract)
[18] 鄒建軍,曾愛軍,何雄奎,等. 果園自動對靶噴霧機紅外探測控制系統的研制[J]. 農業工程學報,2007,23(1):129-132.
Zou Jianjun, Zeng Aijun, He Xiongkui, et al. Research and development of infrared detection system for automatic target sprayer used in orchard[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2007, 23(1): 129-132. (in Chinese with English abstract)
[19] 肖健. 果樹對靶噴霧系統中圖像識別技術[D]. 北京:中國農業大學,2005.
Xiao Jian. Image Recognition Used in Crown Detection for Orchard Spraying System[D]. Beijing: China Agricultural University, 2005. (in Chinese with English abstract)
[20] 趙茂程,鄭加強,凌小靜. 一種基于小波變換的圖像過渡區提取及分割方法[J]. 農業工程學報,2005,21(11):103-107.
Zhao Maocheng, Zheng Jiaqiang, Ling Xiaojing. Image transition region extraction and segmentation method based on wavelet transform[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2005, 21(11): 103-107. (in Chinese with English abstract)
[21] Ozluoymak, Omer Baris, Ali Bolat, et al. Design, development, and evaluation of a target oriented weed control system using machine vision[J]. Turkish Journal of Agriculture and Forestry, 2019, 43(2): 164-173.
[22] Tellaeche A, Burgosartizzu X P, Pajares G, et al. A new vision-based approach to differential spraying in precision agriculture[J]. Computers and Electronics in Agriculture, 2008, 60: 144-155.
[23] Xu Y, Gao Z, Khot L, et al. A real-time weed mapping and precision herbicide spraying system for row crops[J]. Sensors, 2018, 18(12): 4245.
[24] Asaei H, Jafari A, Loghavi M. Site-specific orchard sprayer equipped with machine vision for chemical usage management[J]. Computers and Electronics in Agriculture, 2019, 162: 431-439.
[25] 袁鵬成,李秋潔,鄧賢,等. 基于LiDAR的對靶噴霧實時控制系統設計與試驗[J]. 農業機械學報,2020,51(S1):273-280.
Yuan Pengcheng, Li Qiujie, Deng Xian, et al. Design and experiment of Real-time Control System for Target Spraying Based on LiDAR[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(S1): 273-280. (in Chinese with English abstract)
[26] 許林云,張昊天,張海鋒,等. 果園噴霧機自動對靶噴霧控制系統研制與試驗[J]. 農業工程學報,2014,30(22):1-9.
Xu Linyun, Zhang Haotian, Zhang Haifeng, et al. Development and experiment of automatic target spray control system used in orchard sprayer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(22): 1-9. (in Chinese with English abstract)
[27] Tavares R M, Jo?o P A R Cunha, Alves T C, et al. Electrostatic spraying in the chemical control of Triozoida limbata (Enderlein) (Hemiptera: Triozidae) inguava treesL.)[J]. Pest Management Science, 2017, 73(6): 1148-1153.
[28] 薛楊春. 果園靜電噴霧機的設計與試驗[D]. 楊凌:西北農林科技大學,2019.
Xue Yangchun. Design and Test of Orchard Electrostatic Sprayer[D]. Yangling: Northwest Agriculture and Forest Science and Technology University, 2019. (in Chinese with English abstract)
[29] Cerqueira D T R D, Raetano C G, Pogetto M H F A D, et al. Optimization of spray deposition and Tetranychus urticae control with air assisted and electrostatic sprayer[J]. Scientia Agricola, 2017, 74(1): 32-40.
[30] Zhang W, Hou Y, Liu X, et al. Wind tunnel experimental study on droplet drift reduction by a conical electrostatic nozzle for pesticide spraying[J]. International Journal of Agricultural and Biological Engineering, 2017, 10(3): 87-94.
[31] 宋淑然,鄭君彬,洪添勝,等. 果樹對靶噴霧機柔性噴臂控制設計及試驗[J]. 農機化研究,2017,39(5):106-112.
Song Shuran, Zheng Junbin, Hong Tiansheng, et al. Design and experiment of the control of flexible spray arm on orchard targeted spray device[J]. Journal of Agricultural Mechanization Research, 2017, 39(5): 106-112. (in Chinese with English abstract)
[32] 周慧,魯植雄,白學峰,等. 四輪驅動拖拉機滑轉率的測量與特性分析[J]. 山東農業大學學報(自然科學版),201,44(3):423-427.
Zhou Hui, Lu Zhixiong, Bai Xuefeng, et al. Wheel slip measurement in 4wd tractor based on Labview[J]. Journal of Shandong Agricultural University(Natural Science Edition), 2013, 44(3): 423-427. (in Chinese with English abstract)
[33] 中華人民共和國工業和信息化部. JB/T 9782-2014植物保護機械-通用試驗方法[S]. 北京:中國質檢出版社,2014.
Development and experiments of the hanging flexible targeted spray device for orchards
Chen Zehong1, Chen Jianze2, Song Shuran1,3,4※, Sun Daozong1,3,4
(1.,,510642,;2..,.,516000,;3.,510642,;4.,,510642,)
Spray drift has been one of the major diffuse pollution sources for fertilizers and pesticides in intensive agriculture. Non-target drift loss of pesticides has posed a great risk to the ecological environment in recent years. It is a high demand to improve the utilization rate of pesticides for the reduction of spray drift in an orchard. In this study, a hanging-type, flexible, and targeted spray device was developed to promote the efficiency of spraying with less mechanical damage to the fruit branches and leaves. The spraying device included ultrasonic target detection, a main controller, speed measurement, and a solenoid valve control module. As the core of coordination, the main controller was responsible for the data transmission with the other three modules. A Dongfanghong MS-304 tractor was taken as the carrying platform, with overall dimensions (length × width × height) of 3.6 m × 1.5 m × 1.6 m. A three-point suspension mechanism was also used to carry the spray frame on the rear side of the tractor. The spray frame mainly included a load-bearing frame, a lifting guide rail, a lifting frame, a first-level spread arm, a second-level spread arm, a hanging spray rod, and an inverted Y-shaped nozzle bracket. Among them, the spray arm was folded twice, including the lifting frame, the first-level spread arm, and the second-level spread arm. A double cross universal joint was used for the flexible connection between the hanging spray boom and the spray arm, and a flexible spray hose was between the hanging spray end and the spray head for the flexible spraying. As such, the flexible and bendable spray hose was utilized to reduce the mechanical damage to the irregular branches and leaves. Different address codes were assigned in various modules, due to a large amount of data processing. The data conflicts were avoided to first match the address codes of the main controller as-received data. Three ultrasonic ranging sensors (TCF40-16TR1) were installed on the left and right sides of the tractor, particularly in the upper, middle, and lower order along the vertical direction. The horizontal distance was 4.1m between the ultrasonic sensor holder and the spray rack, in order to detect the target at each height. In addition, a sleeve was designed to strengthen the ultrasonic energy of the sensors in the central axis of the beam, in order to reduce the detection range under the same detection distance for better directionality of the spraying. Different levels of spray nozzles were prevented to trigger the spray ahead of time, due to the driving forward of the tractor. Specifically, the Hall sensor was utilized to detect the magnetic field strength on the tractor rim for the real-time running speed of the tractor. 14 solenoid valves were selected to control the sprinklers, four of which the inverted Y-type sprinkler brackets were controlled by one solenoid valve, and each of the rest was controlled by a solenoid valve individually. A target spray test was performed on the orange trees with a planting spacing of 4.0 m, tree height of 1.6 m, and crown diameter of 1.4 m. Two factors and three levels of orthogonal experiment were designed for the test. The first factor was the travel speed with the three levels of 0.5, 1.0, and 1.5 m/s, and the second factor was the spray pressure with the three levels of 0.4, 0.5, and 0.6 MPa. A full factorial experimental design was also performed as follows. Prior to the test, 10 sampling points were evenly arranged on the upper, middle, and lower planes on the crown of each orange tree. The droplet labeling was also arranged at the sampling points to receive the medicinal solution. The allura red staining solution was then prepared. The tractor throttle was fixed, according to the factors of the spray test and the horizontal relationship. The speed of the tractor was stabilized at the speed required for the test after debugging. The pressure was also adjusted to the required. Finally, an anemometer was used to measure the wind speed of the surrounding environment. The tractor started to travel and spray when the outdoor wind speed was less than 0.2 m/s. The spraying was automatically stopped when the tractor completely passed all the orange trees. The test results show that: 1) the average droplet adhesion rates were 84.7%, 91.7%, and 88.9% at the spray pressures of 0.4, 0.5, and 0.6 MPa, respectively, when the tractor traveled at a speed of 0.5 m/s. There was no outstanding effect of spray pressure on the droplet adhesion rate at this speed. A lower spray pressure was then selected to reduce the loss of medicinal solution. 2) Once the driving speed of the tractor was 1.0 m/s, the average droplet adhesion rates of 0.4, 0.5 and 0.6 MPa were 64.2%, 70.3%, and 75.8%, respectively. The higher the spray pressure was, the higher the droplet adhesion rate was. Therefore, a higher spray pressure was selected to improve the droplet adhesion rate in this case. 3) The average droplet adhesion rate was less than 50% at the speed of 1.5 m/s, indicating the serious spray drift unsuitable for the spraying. Decreasing spraying was observed at the droplet adhesion rate in the upper, middle, and lower layers of the canopy when the spray pressure was the same. Consequently, the greater the speed of the tractor was, the more outstanding the decreasing trend was. Furthermore, the droplet adhesion rate of the leaf back was much lower than that on the leaf front, temporarily unsuitable for spraying with high requirements. It is then necessary to adjust the nozzle angle on the hanging spray bar for a higher droplet adhesion rate on the leaf back in the future.
plant protection machinery; orchard; target spraying; flexible; ultrasonic distance measurement; droplet adhesion rate
10.11975/j.issn.1002-6819.2022.18.002
S491
A
1002-6819(2022)-18-0011-10
陳澤鴻,陳建澤,宋淑然,等. 果園懸掛式柔性對靶噴霧裝置研制與試驗[J]. 農業工程學報,2022,38(18):11-20.doi:10.11975/j.issn.1002-6819.2022.18.002 http://www.tcsae.org
Chen Zehong, Chen Jianze, Song Shuran, et al. Development and experiments of the hanging flexible targeted spray device for orchards[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(18): 11-20. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2022.18.002 http://www.tcsae.org
2022-05-18
2022-08-30
國家自然科學基金項目(31671591);廣東省現代農業產業技術體系創新團隊建設專項資金項目(2022KJ108);廣州市科技計劃項目(202002030245);國家現代農業產業技術體系資助項目(CARS-26)
陳澤鴻,研究方向為對靶噴霧。Email:chenzehong@stu.scau.edu.cn
宋淑然,博士,教授,研究方向為噴霧技術及測控技術。Email:songshuran@scau.edu.cn