煤礦掘進機遠程智能控制技術研究
2022-02-07 21:43:15張曜
科技研究·理論版 2022年1期
張曜
摘 要:掘進和回采是煤礦生產的2個重要環節,掘進機是用于煤礦井下開鑿巷道的機器。煤礦巷道的快速掘進是保證煤礦生產礦井穩定高產的關鍵,高效機械化的掘進與支護技術是保證礦井實現高效高產的必要條件,也是未來巷道掘進技術的發展方向。隨著智能制造的大力推進和煤礦生產自動化需求的增大,掘進機遠程智能控制得到了煤礦企業的青睞。本文對煤礦掘進機遠程智能控制技術進行研究。
關鍵詞:煤礦掘進機;遠程;智能;控制技術
1煤礦掘進機遠程控制系統組成及智能化升級
煤礦掘進機作為礦井高效掘進的機械化裝備,其性能好壞及智能化控制程度直接決定礦井掘進效率和安全。礦井中由于存在瓦斯等易燃易爆氣體,導致礦井中的設備及控制系統的電氣元器件等要求都較高。煤礦掘進機遠程控制系統主要由掘進機、高清攝像頭、中繼站、礦井控制中心、網絡平臺、遠程遙控器、地面總控中心及掘進機遠程監控系統等組成。由于煤礦礦井存在瓦斯等易燃易爆危險氣體,要求煤礦井下的掘進機、高清攝像頭、中繼站、礦井控制中心均具有防爆功能,因此機械硬件、控制軟件及連接系統應具有高度防爆性和抗干擾性。掘進機上及礦井中安裝的高清攝像頭將掘進機周圍環境特性、參數及掘進機自身關鍵參數實時采集,并通過中繼站和傳輸線將實時采集信息傳輸給礦井控制中心;礦井控制中心將采集和處理的數據通過網絡平臺傳遞給地面總控中心,同時通過網絡平臺實現與遠程遙控器的連接與控制;地面總控中心對采集的數據進行最終的計算和處理,將煤礦掘進機需要呈現監控的關鍵參數傳遞給掘進機遠程監控系統,實現對煤礦掘進機遠程控制。在煤礦掘進機遠程控制中運用了可視化、掘進機姿態和慣性導航系統及自動掘進等控制技術。
煤礦掘進機遠程控制智能化升級主要分為聯機集中控制、遙控開采、更深入的智能化控制3個發展階段。①掘進機聯機集中控制主要是實現掘進機設備聯機集中控制,從而實現掘進的高產高效、自動化運行;②掘進機遙控開采在聯機集中控制的基礎上,增加順槽遠程控制和地面遠程控制等遠程遙控控制,從而實現對掘進機遠程遙控控制;③掘進機更深入的智能化控制在聯機集中控制和遠程遙控的基礎上,增加更多需求的傳感器及反饋系統、監控系統,從而實現掘進機遠程智能自動化控制,可以實現掘進機自動無人化工作。
2煤礦掘進機遠程控制
煤礦掘進機遠程控制主要由地面的普通視頻監控中心、總控中心及數據采集和處理,礦井下的防爆視頻監控中心、防爆控制中心、視距遙控和遠程遙控等主要系統組成。防爆監控中心由監控分站交換機、防爆攝像機、防爆高清攝像頭等組成;防爆控制中心主要由CAN總線轉換、遙控接收器、運動控制器、擴展模塊、慣性導航系統等組成,其中運動控制器主要實現電流、電壓、液位、漏電、溫度、泊位、姿態的控制; 擴展模塊主要由電氣控制、電磁閥控制、傳感器數據采集等組成。通過總控系統可以實現對掘進機的視頻、遠程遙控、運動控制(電流、電壓、液位、漏電、溫度、泊位)、電氣控制、電磁閥控制及姿態和慣性導航等遠程智能控制。
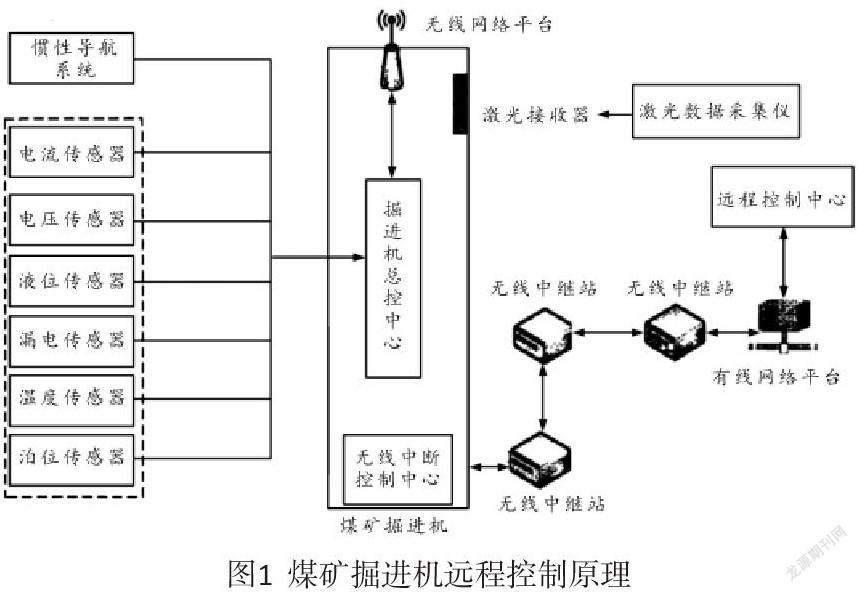
根據煤礦掘進機遠程控制框架得到煤礦掘進機遠程控制原理如圖1所示。煤礦掘進機遠程智能控制系統主要由掘進機總控中心、無線網絡平臺、激光接收器、激光數據采集儀、無線中繼控制中心、無線中繼站、有線網絡平臺、遠程控制中心、慣性導航系統、電流傳感器、電壓傳感器、液位傳感器、漏電傳感器、溫度傳感器、泊位傳感器等組成。慣性導航系統、電流傳感器、電壓傳感器、液位傳感器、漏電傳感器、溫度傳感器、泊位傳感器、激光數據采集儀獲得的煤礦掘進機實時數據,通過激光接收器、掘進機總控中心、無線網絡平臺、無線中繼控制中心、無線中繼站、有限網絡平臺、遠程控制中心等系統實現對煤礦掘進機的遠程智能控制。
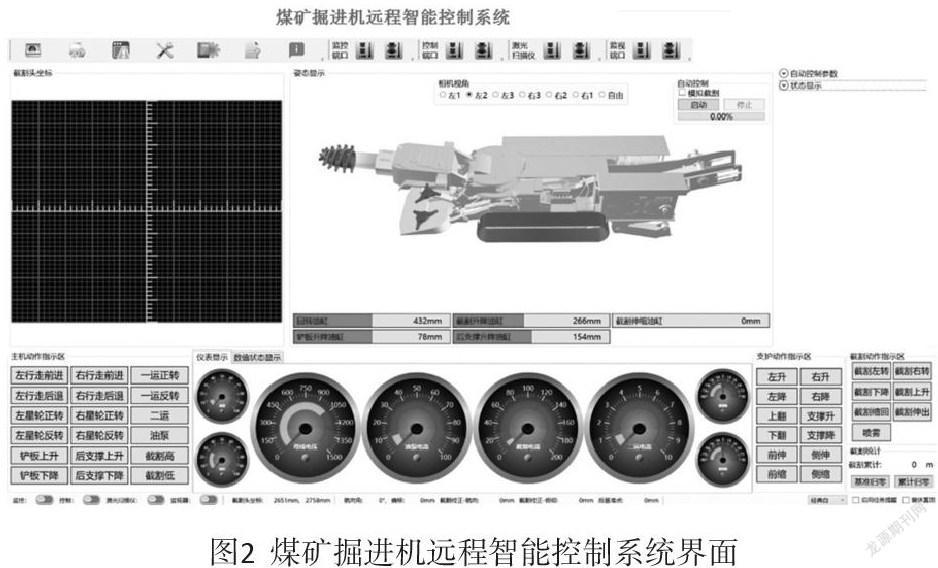
根據煤礦掘進機遠程控制系統組成、框架及原理設計的遠程智能控制系統界面如圖2所示。
由圖2可知,所設計的煤礦掘進機遠程智能控制系統可以實現對煤礦掘進機在實際工況下的前進、后退、轉彎、鏟板、截割、支撐等動作的遠程智能化控制,通過遠程智能化控制實現掘進機高效高產、自動智能運行。
結束語:煤礦掘進機為礦井重要的掘進裝備。為了提高煤礦掘進機掘進效率和智能化,以某型煤礦掘進機為研究對象,對掘進機遠程智能化組成、智能化升級進行分析,設計煤礦掘進機遠程智能控制框架,研究控制原理,設計煤礦掘進機遠程智能控制系統,并在實際生產中進行應用,為煤礦掘進機遠程智能化控制及智能化升級等方面提供技術依據和理論參考。
參考文獻:
[1]胡忠利.自動化掘進機控制系統設計[J].煤礦機械,2021,42(5):11-13.
[2]李鵬.EBZ160型礦用掘進機遠程線控制系統的應用研究[J].煤炭與化工, 2021,44(1):75-77.
[3]黃海飛. 淺談掘進機遠程智能采礦系統設備單元[J]. 煤礦機電,2020, 41(6):49-52.
猜你喜歡
表面工程與再制造(2019年6期)2019-08-24 06:40:04
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2019年7期)2019-04-25 13:16:50
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
上海大中型電機(2017年4期)2017-02-06 05:27:06
照明工程學報(2016年3期)2016-06-01 12:17:56
