輕型高速堆垛機立柱變形分析及速度控制方法研究
2022-02-11 11:46:42武名虎盧宗慧于多加周強龍
制造業自動化 2022年1期
李 巖,武名虎,盧宗慧,于多加,周強龍
(北自所(北京)科技發展有限公司,北京 100120)
0 引言
作為自動化物流倉儲系統的核心設備,堆垛機的技術參數與運行效率直接影響倉儲系統的穩定性、效率及運營成本。堆垛機機械結構的整體剛度對運行過程中的定位精度、停穩時間、結構應力及設計使用壽命都有著非常重要的影響。影響堆垛機立柱撓曲變形的因素主要有立柱、載貨臺及上橫梁等單元自身慣性力所產生的彎矩和貨物等單元自重對立柱產生的彎矩等,同時不同速度控制方法對立柱的撓曲變形的影響也不盡相同。
本文以北自所(北京)科技發展有限公司基金項目輕型單立柱高速堆垛機為研究對象,通過多體動力學分析方法推導出立柱的動態撓曲變形公式,并利用位移比較法,推導格構式鋁合金立柱的等效慣性矩,對公式進行修正。應用ANSYS Workbench軟件建立堆垛機有限元模型,對高速高加速狀態下堆垛機進行分析,得出立柱撓曲變形仿真結果。對比不同速度控制方法對立柱撓曲變形的影響,得出了立柱撓曲變形與加速度的關系曲線,確定了運行加速度與加速度變化率對立柱撓曲變形的影響,根據分析結果,提出了一種切實可靠的速度控制方法,有效的減小了運行過程中的立柱振動,減小了有害沖擊。
1 輕型高速堆垛機簡介
當下智能物流系統中,多采用巷道式堆垛機,根據堆垛機的結構組成,又可以分為雙立柱堆垛機和單立柱堆垛機,本文所研究的輕量化高速堆垛機就是單立柱堆垛機的一種,其結構組成示意圖如圖1所示。堆垛機的工作原理:夾軌式傳動機構驅動堆垛機沿著立體庫的鋼軌水平運行,同步帶提升機構帶動載貨臺及貨叉沿著立柱上升下降到指定位置,通過貨叉的伸縮機構,將貨物送入目標貨位地址或將目標貨位地址的貨物取出。

圖1 輕量化高速堆垛機示意圖
輕型高速堆垛機在加速度、速度方面與常規堆垛機相比,有了很大的提升,進而大幅度提高了自動化立體倉庫的出入庫效率,技術參數對比如表1所示。

表1 常規堆垛機與輕量化高速堆垛機技術參數對比
2 立柱撓曲變形數學模型
以下橫梁為x軸,立柱為y軸建立坐標系。
2.1 格構式鋁合金柱的等效慣性矩
格構式鋁合金立柱,其密度約占鋼鐵密度的三分之一,有助于堆垛機的輕量化設計,對于高速高加速技術要求的實現起到了根本性的作用。格構式鋁合金立柱的結構示意圖見圖2。格構式鋁合金立柱是輕量化堆垛機的主要承重構件,其中雙肢又是立柱的主要受力結構,綴材(又分為綴條和綴板)連接雙肢,使得雙肢能夠合為一體,進行整體工作。與實腹式構件不同的是,格構式構件的綴材由于剪切力的作用會產生一定量的剪切變形,所以相比較實腹式柱,其抗彎剛度不同,即慣性矩不同。

圖2 格構式鋁合金立柱結構示意圖
計算格構柱的撓曲變形,可采用等效為實腹式立柱的方法計算,即慣性矩等效方法。等效慣性矩的推導方法有兩種:其一是采用換算長細比法,即利用臨界力相等的方法求得換算長細比。與長細比的定義公式λ=進行對比,就可以得到等效慣性矩(在長度相等的情況下)。其二是采用位移比較法,即通過比較實腹式構件與格構式構件在水平載荷Q的作用下頂部側向位移的表達式,推導出等效慣性矩的計算公式。換算長細比法推導出的等效慣性矩只適用于單個構件的力學分析,無法進行格構式構件的整體分析計算,所以本文采用位移比較法推導格構式構件的等效慣性矩,推導過程如下。新型立柱對應雙肢格構式構件簡圖如圖3所示,圖中虛線表示綴條。
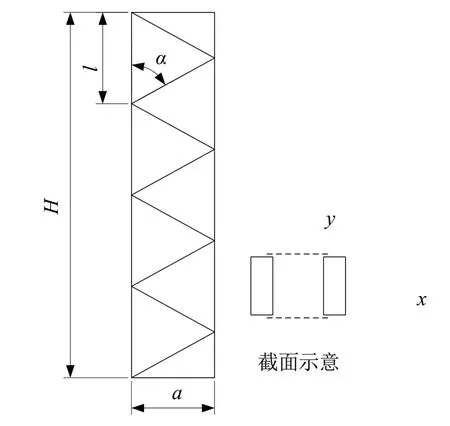
圖3 雙肢格構式構件簡圖
假設雙肢格構式構件頂部作用水平力Q,則根據結構力學理論,可得出其頂部的位移量Δ可用下式表示:

其中δ為格構件的側向柔度系數,根據結構力學的單位荷載法可以求出雙肢格構式構件的側向柔度系數,如式(2)所示。

當不考慮綴條對格構件變形影響時,其對Y軸的慣性矩可表示為:

將式(2)、式(3)代入式(1)中,整理可得格構件在水平載荷Q作用下的位移計算公式:

根據材料力學,用積分法求實腹式構件的彎曲變形,可得頂部在水平載荷Q的作用下的變形為:

聯合式(4)、式(5)即可得出格構式立柱等效實腹式立柱的等效慣性矩:

2.2 立柱撓曲變形計算
立柱的受力模型如圖4所示。根據材料力學梁的變形微分方程和疊加原理可得,立柱的撓曲變形為:

圖4 立柱的受力模型

式中:fM為各質量單元對立柱的作用所產生的變形;fav為載貨臺及貨物加速上升時使得立柱產生的變形;faH為各質量單元包括立柱自身由于慣性力所產生的變形;fθ為下橫梁彎曲變形使得立柱產生的變形。
各個質量單元對立柱的彎矩作用,導致立柱產生的撓曲變形為:

式中:Mi為載貨臺、貨物、上橫梁與控制柜對立柱的彎矩;xi、yi為各質量單元的坐標。
載貨臺及貨物加速上升對立柱的作用力,導致立柱產生的撓曲變形為:

式中:mi為各質量單元的質量;av為提升加速度。
各質量單元由于慣性力作用,導致立柱產生的撓曲變形為:

式中:q為重力加速度;aH為水平運行加速度。
下橫梁彎曲變形對立柱的影響,使得立柱參數的撓曲變形為:
將式(6)、式(8)、式(9)、式(10)、式(11)代入式(7)中,并整理可得格構式鋁合金立柱的撓曲變形公式為:


式中:E'為下橫梁的彈性模量;I'為下橫梁的慣性矩。
從上式可以看出,除了堆垛機自身材料的彈性模量與慣性矩等屬性之外,堆垛機的水平運行加速度與垂直加速度是影響立柱撓曲變形的主要因素,且當載貨臺和貨物運行到立柱頂端,運行加速度達到最大值時,立柱的撓曲變形最大。
2.3 立柱撓曲變形仿真分析
以式(12)為理論基礎,應用ANSYS Workbench對格構式鋁合金柱進行模擬仿真。
對堆垛機的機械結構進行必要的簡化,將電氣控制柜等效為質量單元,耦合到立柱的相應位置。簡化后的模型利用SolidWorks進行建模,導入Workbench中,利用Mesh中的Multizone模塊進行網格劃分,網格疏密程度用Sizing控制器控制。
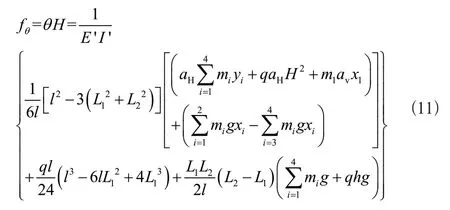
邊界條件設置:將固定約束設置在兩個行走輪處,分別約束其在X、Y、Z三個方向自由度。因上橫梁按天軌沿軌道方向做循環往復的直線運動,所以約束其在Z軸方向的自由度。對堆垛機整體施加重力加速度與沿巷道方向的運行加速度。仿真結果如圖5所示。當載貨臺和貨物出現在最高位時,立柱出現最大撓曲變形,所以選取載貨臺及貨物在最高位時進行仿真。其立柱在加速度a=3m/s2情況下,其最大撓曲變形出現在立柱頂端,最大值為9.5164mm。沿著立柱高度方向選取一條路徑path,圖6所示為路徑上的撓度的變化,由此可明顯看出,隨著高度升高,撓度逐漸變大。

圖5 堆垛機變形云圖
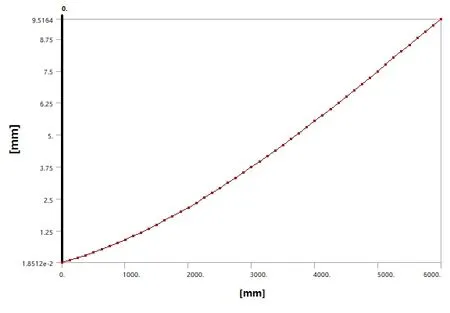
圖6 立柱高度方向變形曲線
3 速度控制方法研究
由上述撓曲變形修正公式與仿真分析結果可知,堆垛機運行速度控制方法是影響立柱撓曲變形的主要因素之
出,因在t1~t7時刻,加速度仍存在突變,且加速度變化率仍有階躍式變化,所以在對應時刻立柱撓曲變形存在波動,存在有害振動。一。在確定堆垛機運行速度控制方法時,要綜合考慮堆垛機工作效率、堆垛機的穩定性和安全性等因素。堆垛機的運行周期可以分為加速階段、勻速階段與減速階段,其中加減速階段的速度控制方法直接決定了堆垛機運行過程的平穩性能。除此之外,速度控制方法的優劣也決定著位置控制的效率。
所以研究速度控制方法對堆垛機立柱撓曲變形的影響,對于提高堆垛機工作效率、運行穩定性和安全性有著非常重要的作用。本文通過對比梯形速度控制方法、S型速度控制方法兩種速度控制方法對立柱撓曲變形的影響的異同,提出了高次函數速度控制方法。
3.1 梯形速度控制方法
目前工程應用最多的速度控制方法仍是勻加速控制即梯形速度控制方法。此方法在長期的工程應用中存在明顯的優缺點。其優點就是控制程序簡單,實現起來比較容易;其缺點就是在加速與勻速和勻速與減速的過渡階段會有加速度的突變,在慣性力的作用下,立柱的撓曲變形會隨之發生變化,產生有害振動,對系統造成沖擊。
梯形速度控制曲線如圖7所示。從圖中可以看出,加速度與速度在t3、t4時刻有明顯的斜率變化,且加速度存在階躍跳動。在此速度控制方法下的撓曲變形曲線如圖8所示。從圖中可以看出,在加速度突變的時刻,立柱撓曲變形有明顯的波動,即存在有害振動。
圖7 梯形速度控制曲線
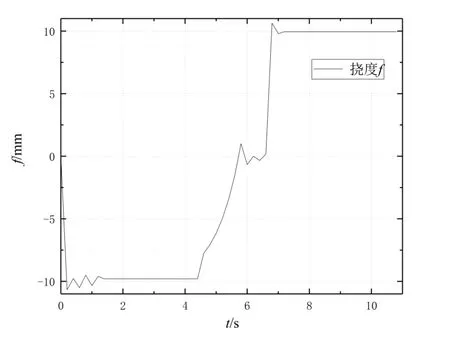
圖8 梯形速度控制方法下的撓曲變形
3.2 S型速度控制方法
針對梯形速度控制方法在使用過程中的缺點,S型速度控制方法做了很大的優化,S型速度控制曲線如圖9所示。其一個速度控制周期包含三個基本階段:其一為加速階段,時間周期為0~t3,其中又包括初加速、恒加速與終加速階段;其二為勻速階段,時間周期為t3~t4;其三為減速階段,時間周期為t4~t7,其中又分為初減速、恒減速與終減速三個階段。

圖9 S型速度控制曲線
在S型速度控制方法下的立柱撓曲變形曲線如圖10所示。與梯形速度控制方法相比,其加速度由初始值到最大值有一個過渡階段,使得立柱撓度由零到最大撓度的過程比較平緩,對立柱的沖擊較小。但是從仿真結果中仍可看出,因在t1~t7時刻,加速度仍存在突變,且加速度變化率仍有階躍式變化,所以在對應時刻立柱撓曲變形存在波動,存在有害振動。

圖10 S型速度控制方法下的撓曲變形
3.3 高次函數速度控制方法
比較梯形速度控制方法與S型速度控制方法可見,兩種方法均存在加速度的突變,這會使得堆垛機運行方向慣性力發生突變,導致立柱產生有害振動。針對以上兩種方法存在的缺點,提出一種切實可靠的速度控制方法,即高次函數速度控制方法,其速度方程可用以下三個方程式表達,即:

式中:μ1~μ5為系數。
高次函數速度控制曲線如圖11所示,從圖中可以看出,無論是速度、加速度還是加速度變化率,其在任何時刻都可以平緩過渡,不存在階躍式變化。在此方法下的撓曲變形曲線如圖12所示,與上述兩種方法的仿真結果對比,可以明顯看出:立柱最大撓曲變形有所減小,在立柱撓度由零到最大撓度的過程非常平緩,且在t1~t7的關鍵時刻立柱撓度無明顯波動,減小了有害振動。
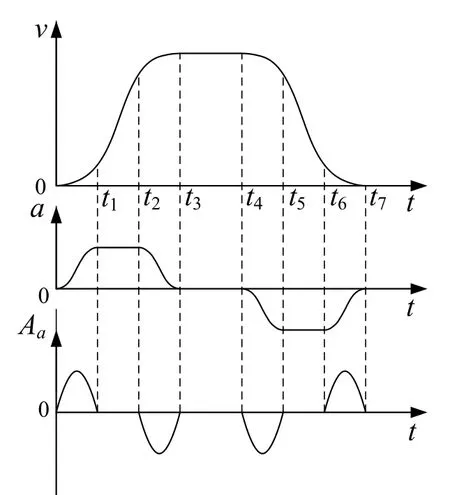
圖11 高次函數速度控制曲線

圖12 高次函數控制方法下的撓曲變形
4 結語
1)應用多體動力學與位移比較法,建立了格構式鋁合金立柱的動態撓曲變形修正公式,得出了水平與垂直加速度是立柱發生撓曲變形的主要因素。
2)應用ANSYS Workbench對堆垛機機械結構進行有限元分析,得出了立柱撓曲變形的仿真結果。
3)分析了梯形速度控制方法與S型速度控制方法對立柱撓曲變形的影響,得出了不同速度控制方法下的立柱撓曲變形曲線,確定了運行加速度與加速度變化率對立柱撓曲變形的影響。
4)針對梯形與S型速度控制方法存在的缺點,提出一種切實可靠的速度控制方法,即高次函數速度控制方法,有效的減小了立柱在運行過程中的有害振動。
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
兒童故事畫報(2019年5期)2019-05-26 14:26:14
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
