VICTS天線跟蹤系統關鍵技術研究*
2022-02-12 12:04:30高巍趙亮
艦船電子工程 2022年1期
高 巍 趙 亮
(1.中國電子科技集團公司第三十九研究所 西安 710065)(2.陜西省天線與控制技術重點實驗室 西安 710065)
1 引言
采用VICTS技術的天線具有超低剖面-高度僅十幾公分;集成度高-天線內置控制單元、功放及跟蹤接收機;重量輕,安裝靈活等特點,并且可以滿足在車輛行進過程中的正常通信業務,具有廣泛的應用前景[1]。
該類型天線原理與傳統拋物面天線具有很大的區別,存在波束指向算法復雜,增益跟隨波束仰角和信號頻率變化等問題,導致在跟蹤過程中難以對準目標,動態性能較差,以及在復雜遮擋環境下波束指向被拉偏從而導致失鎖等問題。為解決上述問題,本文從VICTS動中通跟蹤系統原理出發并結合該類天線特點,對跟蹤過程中存在的一些問題進行分析并提出解決方案。
2 VICTS天線跟蹤系統
VICTS天線采用二維斷面掃描裝置,結構上共分三層,分別為激勵層、CTS層和極化層。各層天線面均為同心圓盤結構,并通過天線控制單元、電機以及機械傳動結構帶動天線面旋轉。波束掃描依靠激勵層和CTS層的協同控制實現。VICTS天線自跟蹤系統通常采用圖1所示方案。
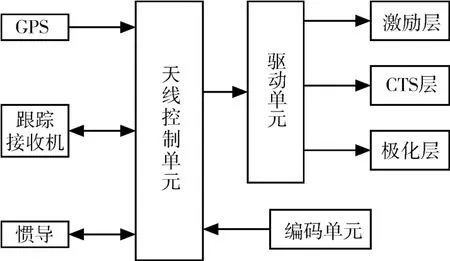
圖1 VICTS跟蹤系統原理框圖
VICTS動中通天線自跟蹤系統以天線控制單元為核心,利用一系列傳感器配合伺服系統,能夠實現在靜止或動態情況下對衛星的精確指向。在跟蹤開始階段,依靠GPS獲取當地經緯度并計算出衛星指向。通過慣導測得車體姿態角,將衛星指向從大地系轉換到測量系下,并利用天線控制單元并結合波束指向算法,控制各層天線面旋轉一定角度使波束指向衛星。然后通過跟蹤接收機不斷采集的信號電平的大小,采用圓錐掃描等信號閉環方式微調指向,一方面可以消除系統結構誤差,使天線精確指向衛星;另一方面對慣導航向進行實時校準,保證天線對衛星長期穩定的跟蹤。
3 VICTS天線跟蹤系統關鍵技術
傳統拋物面天線的增益是恒定值,與其波束仰角無關,因此在跟蹤階段對準衛星時,其信號電平的大小為定值。由VICTS天線的原理可知,其增益隨波束仰角和信號頻率變化,導致在衛星跟蹤過程中信號電平隨仰角變化而變化,在采用信號閉環方式時,由于天線增益的變化,導致計算出錯誤的調整量,從而影響跟蹤性能。
同時對于VICTS天線而言,由于其不存在實際的物理軸,沒有安裝速度陀螺的平臺,因此無法像拋物面天線一樣應用陀螺環方式來隔離載體姿態變化,導致動態跟蹤性能較差。
在實際應用過程中會發現,當天線經過城市建筑物、綠化帶樹林等區域時,會發生頻繁進入遮擋然后脫離遮擋,且存在全遮擋、部分遮擋、長遮擋、短遮擋之間不斷來回切換的情況。這種復雜遮擋會導致信號電平時有時無,且有時不是最大值,此時極易干擾信號閉環過程導致天線指向拉偏引起失鎖情況,為此同樣需要制定相應的遮擋策略解決該問題。
3.1 系統標校
由于VICTS天線增益隨信號頻率和波束仰角發生變化,因此考慮在遠場測試條件下通過系統標校將不同仰角下的天線增益標定出來,在信號閉環過程中將低仰角下增益跌落值補償進去,這樣可以避免上述情況從而得到平穩的跟蹤效果。
VICTS天線的波束指向由激勵層和CTS層的之間的角度關系決定,在天線生產裝配過程中存在一定的結構誤差,使得天線的電軸零點與理論值有一定的偏差,導致天線指向精度變差。在系統標校過程中可對此進行一并標定,消除系統誤差從而獲取更高的指向精度。
3.2 動態跟蹤精度
動中通系統動態跟蹤精度主要取決于兩方面因素:速度補償精度和伺服帶寬。由于VICTS天線無法引入陀螺環隔離載體姿態變化,因此考慮利用安裝在天線平臺上的慣導輸出的軸速度來計算出應補償到天線電軸的速度前饋量。速度前饋量的計算公式如下所示。

其中:vaz、vel分別為方位和俯仰方向速度補償量;Zv、Xv、Yv分別為載體方位、俯仰、橫滾旋轉軸速度;A、E為方位和俯仰載體系指向角度。
同時由VICTS天線特點可知,其結構諧振頻率要較拋物面天線高很多。因此還可以適當提高其伺服帶寬來補償由結構精度帶來的前饋補償誤差,從而獲取更高的跟蹤精度。
3.3 復雜遮擋環境
根據復雜遮擋對信號電平的影響特性,提出一種利用信號電平波動大小作為判據的方法來解決該問題。
在天線進入跟蹤狀態并對準衛星后,不斷采集一段時間內的信號電平并實時更新。通過計算該段時間內的信號電平波動大小是否大于正常跟蹤時的電平波動值,并將其作為是否需要進行指向調整的判斷依據。當信號電平波動較大時,認為此時處于遮擋階段,放棄指向調整。當信號電平波動較小時進行指向調整。這種策略能有效避免由于復雜遮擋過程引起的指向偏離問題。
4 實驗與分析
將上述提到的方法應用到某型VICTS動中通天線系統進行驗證測試,天線增益在40°波束仰角時等效0.6m口徑拋物面天線。分別在二級公路、劇烈顛簸路面、復雜遮擋環境下進行跑車實驗。
4.1 平直路面跟蹤精度測試
在二級公路以80km/h時速行駛進行測試,系統跟蹤亞太六號同步衛星,測試過程對其信號電平進行采樣并記錄如圖2所示。
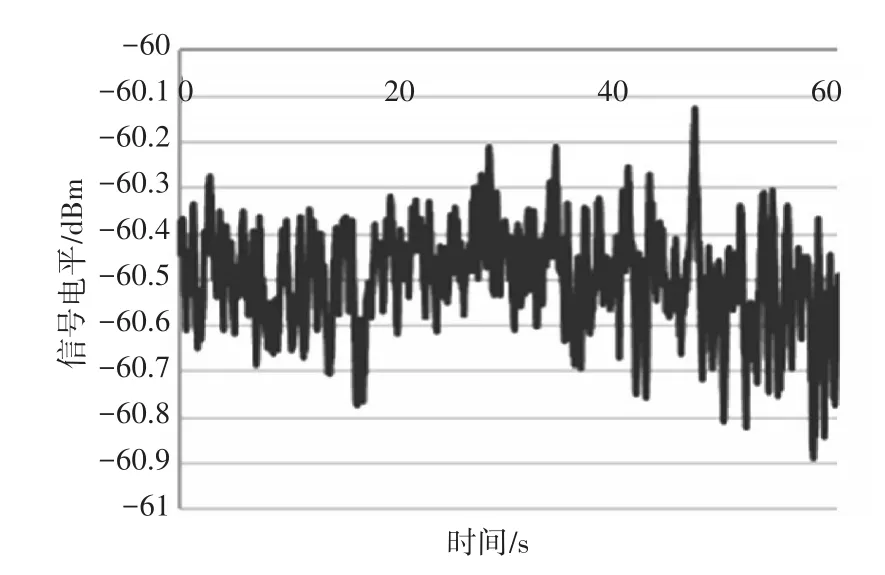
圖2 平直路面跑車測試結果
可以看出車輛行進過程中信號波動較為平穩,在-60.15dBm~-60.85dBm之間,極值變化小于0.7dB。按《公安車載應急通信系統技術規范》測試標準,采用電平跌落法計算跟蹤精度為0.113θ0.5,遠大于其0.13θ0.5的標準,跟蹤精度良好。
4.2 顛簸路面動中通能力測試
為了模擬最惡劣的應用場景,選取一段劇烈起伏路面進行測試,并進行連續轉彎,同樣跟蹤亞太六號同步衛星,并將測試過程中信號電平與載體姿態進行采樣并記錄如圖3所示。
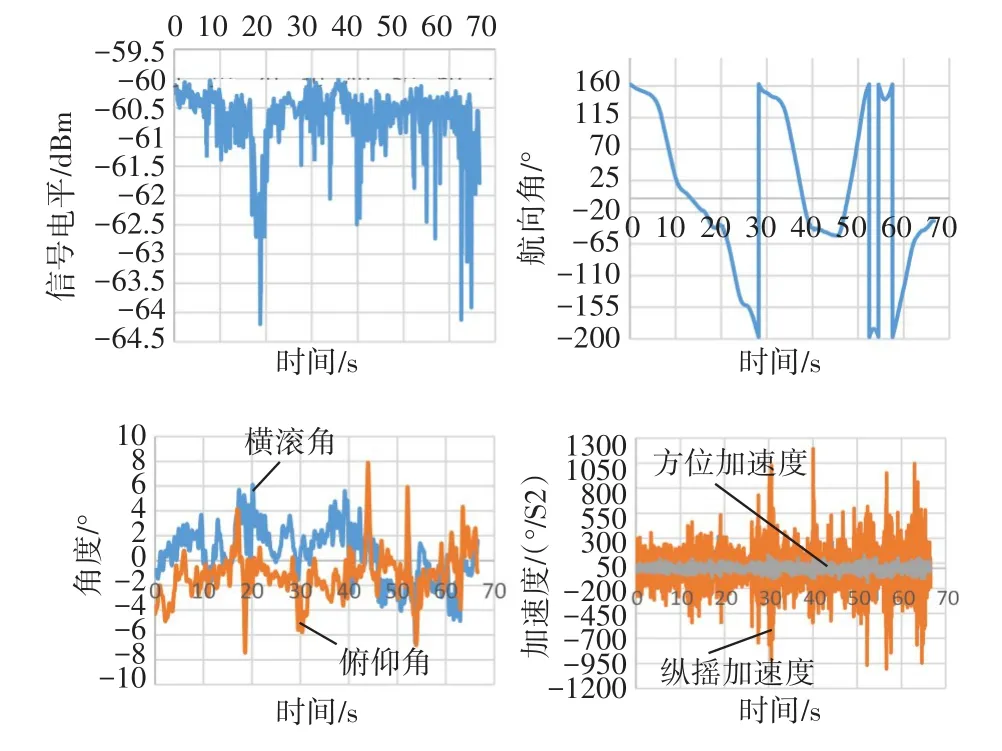
圖3 顛簸路面跑車測試結果
可以看出車輛行進過程中載體姿態變化劇烈,橫滾角和俯仰角在-8°~+8°之間變化,最大加速度超過1000 °/S2。航向變化在-180°~+180°之間,航向最大加速度超過130°/S2。由于VICTS天線本身增益隨波束仰角發生變化,因此測試過程中始終用尋星儀監測電視信號質量,畫面全程無卡頓,系統未失鎖。
4.3 復雜遮擋環境下跟蹤系統測試
在城市道路進行遮擋測試,沿途經過大樓、綠化帶樹林、電線桿、廣告牌等遮擋物。同時控制行車狀態進行不同遮擋時長的測試,對全遮擋、部分遮擋、長時間遮擋、短時間遮擋等各種類型的遮擋情況進行測試,測試時長60min,測試全程信號電平變化如圖4所示。
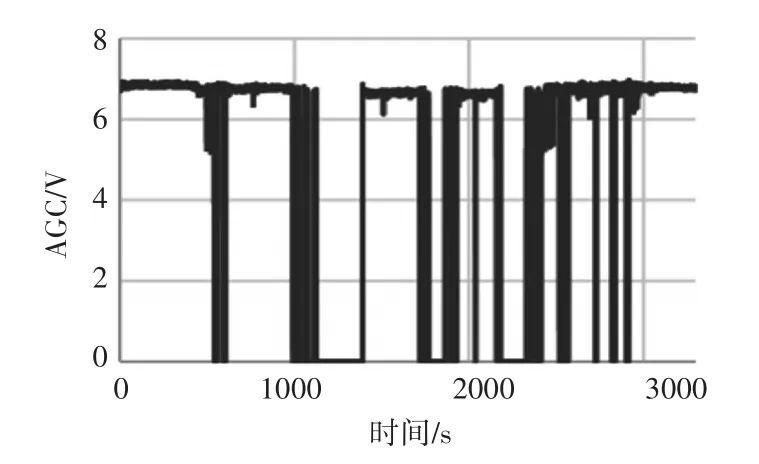
圖4 遮擋測試結果
可以看出,在復雜遮擋環境下長時間跑車測試過程中,電平均在遮擋消失瞬間后迅速恢復,沒有出現波束指向被拉偏導致系統失鎖的情況。
5 結語
本文針對VICTS天線在實際應用場合下影響其跟蹤性能的主要因素進行分析并給出解決方案。通過在不同路面和遮擋環境下的跑車實驗結果來看,系統實際跟蹤效果良好,驗證了所提方法的有效性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25