基于動態前饋的鍋爐超前加速控制策略研究與應用
2022-02-17 12:10:58柳春暉李志偉
電子設計工程 2022年3期
葛 朋,柳春暉,李 明,李志偉
(1.國家能源集團雙遼發電有限公司,吉林雙遼 136400;2.東北電力大學,吉林吉林 132012)
燃煤機組在協調控制方式下運行時,當負荷指令發生變化時,發電機組的實際功率響應較快,但鍋爐設備改變熱負荷需要經歷燃料量變化、制粉、燃燒、熱交換等物理過程,相對于負荷指令變化存在較大滯后,而且各系統間耦合嚴重[1-2]。在動態過程中,主汽壓、汽溫和給水控制系統會存在一定的波動。同時,現階段全國各電廠煤源不固定,且廠內混配難度較大,鍋爐燃料常年偏離設計煤種對燃燒控制造成不利影響[3]。在當前機組必須投入AGC 方式運行的背景下,滿足電網調度的負荷要求仍是協調控制系統的主要目標。所以在設計協調控制系統時,幾乎均采用以鍋爐跟隨為基礎的控制方式。而鍋爐的燃燒系統延遲和慣性較大,因此提高鍋爐控制的動態響應速度在現階段的實際工程中仍具有重要意義[4-6]。
1 BIR控制的工作原理
BIR 控制策略就是機組負荷開始變化時,在上升或下降的初始時刻給出適當的提前控制量;負荷變化過程中,全面加速鍋爐燃燒和給水調節;穩定在新的負荷工況之前,適時降低調節強度,防止過調[7]。BIR 控制只能在協調控制方式下應用,因此BIR 控制也可定義為“機爐協調鍋爐超前加速控制”。BIR的設計原理如圖1 所示。

圖1 BIR的設計原理
如圖1所示,機組目標負荷變化時,鍋爐主控指令(Boiler Demand,BD)開始變化,以一定速率投入到燃料、送風、給水等系統內,BIR 控制信號隨著負荷目標值和實際負荷之間的偏差產生,在機組出力即將到達目標值時,BIR 信號以一定的速率迅速切除[8]。當機組出力達到目標值時,BIR控制信號歸0。BIR控制只在動態調節時起作用,在穩態時不對系統產生任何影響,作用的時間由鍋爐實際的預期響應時間決定。
BIR 控制信號一般附加到各子系統的前饋值上,使各子系統迅速動作。目的是合理、準確地利用前饋控制技術,控制鍋爐輸入變化量,盡可能抵消擾動所需要的控制量,使調節器始終處于小偏差調節狀態;同時盡可能減少反饋控制量,避免引起系統的不穩定或過度積分[9-10]。需要注意的是,由于鍋爐各子系統的延遲特性不同,因此BIR的生成程序在各子系統的作用方式應具有可調整的參數。
BIR控制一般通過在DCS的協調控制系統中增加BIR 控制邏輯實現,不對鍋爐設備以及其他硬件進行任何改造,僅利用控制策略加快鍋爐動態響應以適應不同工況,縮短鍋爐負荷、壓力和溫度反應時間,使之與汽輪機工作更加協調,從而改善機組的控制品質,是一種經濟性較好的技術策略。早在1989年,BIR 控制已應用在700 MW 直吹式制粉燃煤超臨界直流鍋爐上,參與電網AGC控制,機組在35%~100%的負荷區間運行時每分鐘的負荷變化率能夠穩定在4%。
2 基于動態前饋的BIR控制策略
基于動態前饋的BIR 策略主要是根據機組負荷指令計算BIR 控制作用的投入、切除時間和投入、切除速率,通過控制參數和輔助邏輯實現BIR 控制作用的幅值與時序的修正,BIR 信號生成邏輯構架如圖2 所示。

圖2 BIR信號生成邏輯構架
超前滯后模塊(leadlag)的傳遞函數為:

其中,K為增益,T1為超前時間,T2為滯后時間,將所有的leadlag 模塊(模塊1、模塊2和模塊3)中T1設置為0。為了便于分析,將K設置為1。此時G(s)為一階慣性環節的傳遞函數,即:
式中,1-G(s)為實際微分環節的傳遞函數,具有超前特性,模塊2和模塊3 構成負荷指令的二階微分信號,該信號與一階微分信號加權求和作為BIR 控制信號的投入速率。BIR 控制作用投入時刻的速率可由二階微分部分設置,過渡過程的變化速率可由一階微分部分設置,切除時刻與切除速率由一階微分和二階微分加權計算得出。加法模塊7(Σ)中有比例增益設置,可以調整BIR 信號的幅值和一階、二階微分作用的權重。在模塊4的上游程序中,負荷指令目標值與當前負荷指令的偏差除以負荷變化率,即為從當前負荷指令達到目標負荷所需的時間。因為負荷指令有增、減兩個過程,而時間從物理意義上不能為負值,所以比例模塊8(K)設置值為-1,再與自身代數值高選,即為取絕對值功能,也可直接使用絕對值模塊。函數發生器模塊4(f(x))為一個帶有死區的函數,其主要作用是準確控制二階微分作用投切,以改變BIR 控制信號的投入、切除時間,f(x)的描述點如表1 所示。

表1 二階微分作用投切函數
在當前負荷指令接近負荷目標值時,BIR 控制的作用是切除二階微分,便于迅速切除BIR 信號,起到時序修正作用。兩個比例模塊5(K)、6(K)為BIR信號的限制值增益,BIR 信號限制值一般為變負荷率的倍數,模塊5(K)為正向增益,是該變負荷率下的加負荷方向的最大幅值;模塊6(K)為負向增益,是該變負荷率下的減負荷方向的最大幅值。模塊5(K)、6(K)的增益可以相同,也可以不同。BIR 信號在協調控制系統投入運行一段時間后開始生效。
3 試驗與分析
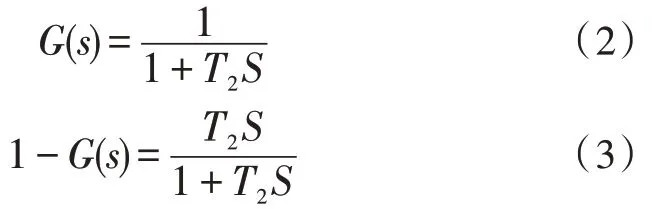
將以上策略應用于某600 MW 機組,圖3是對BIR控制參數調整后的試驗情況。為保證安全對機組進行小范圍擾動,機組目標值從600 MW 降至590 MW,穩定后升至600 MW。通過對曲線分析,機組的實際功率幾乎和負荷指令保持一致,擾動出現時BIR 能迅速動作,并隨負荷指令偏差逐漸縮小,最終為0,主汽壓力變化控制不超過±0.2 MPa。BIR 信號產生初期,由于負荷指令變化,微分作用使BIR 控制投入時間縮短且投入速率增大,因工程實際的微分環節含有慣性,BIR 信號逐漸減弱。在負荷指令接近目標值時,二階微分作用切為0,加快切除速率,最終BIR控制作用隨一階微分作用的逐漸減弱,緩慢下降為0,整體過程和曲線形狀達到預期效果。
圖3 中BIR 信號動態過程曲線和BIR 信號為0的直線所形成的面積,即為動態補償量。假設BIR各參數調整合適,理論上這部分動態補償量就是在鍋爐變負荷時需要額外補充或釋放掉的蓄能。
圖3 BIR試驗曲線
3.1 連續加負荷工況試驗
圖4 為某600 MW 機組以變負荷率6 MW/min的速率從400 MW 逐漸增加負荷至600 MW的過渡過程曲線。可以看出,雖然每次負荷變化目標值不同,但幾次較大幅度的負荷目標值變化所產生BIR 信號的幅值相同。通過對圖2 所示控制策略的分析,變負荷率與兩個比例模塊5(K)、6(K)的乘積有關,K的增益一般設置在3~8 左右,所以BIR 信號的動態幅值是由變負荷率決定,變負荷率越快,BIR 信號的動態幅值越大。而從圖4 中還可以發現,BIR 信號的持續時間與負荷指令的變化時間有關,在負荷指令未達到新的負荷目標值之前,BIR 信號會持續。當負荷指令接近負荷目標值時,BIR 信號提前切除。減負荷工況下,BIR 負方向工作原理與正方向相同。

圖4 鍋爐連續加負荷試驗曲線
3.2 調整變負荷率試驗
對某600 MW 機組加負荷過程進行變負荷率調整試驗,過渡過程曲線如圖5 所示。鍋爐負荷指令為從450 MW 逐漸加負荷至600 MW,3 次改變負荷目標值的過程中進行了變負荷速率的調整。初始變負荷率為3 MW/min,第一次加負荷過程中,首先將變負荷率設置為5 MW/min,升負荷過程中調整為7 MW/min。從BIR 信號的曲線可以看出,變負荷率變化的瞬間,BIR的幅值發生躍升,其目的是進一步補償鍋爐各子系統的動態前饋值,充分利用鍋爐蓄能,在新的變負荷速率下提升主汽壓和機組功率響應幅度。第二次加負荷過程中,初始速率為3 MW/min,升負荷過程中調整為7 MW/min,最終穩定在9 MW/min,BIR信號的幅值也對應產生了3次躍升。試驗期間,升負荷率從7 MW/min 調整到9 MW/min 之前,人為在協調系統中按下了“保持”按鈕,對升負荷過程進行干預試驗,從曲線中可看出負荷指令此時刻停止攀升,BIR 控制信號瞬間復位并出現負向值,加負荷過程迅速終止。BIR 信號出現負值有效地防止穩態之后出現較大的過調,這是負荷指令微分產生的效果,實現將動態前饋指令拉回的作用。

圖5 鍋爐調整變負荷速率試驗曲線
3.3 連續投入試驗
對某660 MW 機組負荷進行連續變負荷試驗,以9 MW/min的變化速率將機組負荷從300 MW 增加至600 MW 再減少至300 MW,其過渡過程曲線如圖6 所示。

圖6 某660 MW機組連續變負荷試驗曲線
從曲線中可以看出,動態過程中負荷的最大超調量控制在±9 MW 以內,主汽壓力最大超調量控制在±0.5 MPa 以內,主汽溫度的最大動態偏差控制在±6 ℃以內,中間點溫度最大動態偏差控制在±5 ℃以內。從圖中BIR 控制作用的曲線可以看出,每一次負荷指令變化,BIR 信號雖持續時間和幅值不同,但對于給水指令和燃料主控指令優化加速明顯。在負荷指令變化瞬間,給水和燃料指令均有不同幅度上升或下降,且汽壓和汽溫并未出現較大的波動,控制效果較為理想。
4 參數設置與應用
4.1 BIR控制信號的曲線
BIR 控制的任務是在鍋爐動態過程中持續對鍋爐各子系統的目標值加入前饋作用,加速各子系統被調量的變化[11-13]。BIR 控制信號包含上升速率和幅值等信息,其動態信號的大小是由3 個超前滯后模塊(leadlag)1、2、3的慣性時間決定的,這3 個慣性時間的設置一般為10 s 級。需要對機組各工況下的參數進行觀察總結,合理設置一階慣性和二階慣性時間的滯后時間。某660 MW 機組試運行期間曾進行了鍋爐蓄能試驗,在機組負荷480 MW 穩定運行的工況下,鍋爐側調節狀態維持不變,汽輪機各調節閥的開度從約40%快速開到100%,機組的負荷可以增加9 MW 左右,并維持約100 s,粗略計算大約有1.36%的瞬態超量輸出,這部分超量輸出即為鍋爐蓄熱釋放的作用。在鍋爐加減負荷時,需要額外的補充或者釋放掉該部分能量,此部分蓄熱量是BIR 控制參數調整的重要依據。由于燃煤機組的協調控制系統是一個非線性、動態的過程,所以不同負荷段下機組的動態模型也是不同的,可以通過分段函數設置不同負荷區間的BIR 參數,以保證BIR的控制品質滿足機組在高、中、低負荷工況下均能滿足電網需求,具有自適應能力。
4.2 BIR控制信號的投入、切除時間
為了充分利用鍋爐蓄熱,提高機組負荷響應速度,機組在變負荷初期動態前饋一般不立即投入,但是直流鍋爐較汽包鍋爐蓄熱能力小,且隨著鍋爐容量的增大,鍋爐蓄熱量與鍋爐最大連續蒸發量的比值越來越小[14-16],所以該文介紹的BIR控制信號在鍋爐負荷指令變化初期即投入,以提升響應速度。另外,由于鍋爐燃燒、傳熱是個大慣性過程,為了避免動態過程燃料指令由于積分作用積累較多,通過對帶有死區的函數f(x)進行設置,可以提前切除動態前饋作用。通過以上方法對投入、切除時刻和投入、切除速率的合理分析與設置,使動態前饋量與機組負荷變化需求相適應,進而提高變負荷過程的動態響應過程精度。
4.3 BIR控制信號在各子系統的設置
由于燃料、風量、給水各子系統在鍋爐工況變化時的響應特性不盡相同,送往各回路的BIR 信號可根據機組負荷變化時的響應特性,以鍋爐運行數據為依據獨立設計作用方式并調整控制參數。一般由于要維持鍋爐富氧燃燒,BIR 信號送往風量控制系統的信號總是使其向增加的方向調整。BIR 信號送至給水系統的信號要經過二階或三階慣性環節再作為流量PID的前饋,目的是適當減緩響應速度與給煤控制同步,保持汽溫穩定。BIR 信號送至給煤控制系統的信號要經過風量和水量的限制之后再送至給煤PID。鍋爐負荷變化的動態過程中,解決燃料、給水、風量的匹配問題,提高鍋爐負荷變化速率是最終目標,BIR 信號及其在不同系統作用方式可以動態實現不同系統之間的快慢調節。
5 結束語
該文介紹了BIR 控制作用的原理以及某600 MW機組的BIR 信號控制邏輯,對機組自身控制特點進行了深入分析研究,借鑒了同類型機組的經驗,在消化吸收的基礎上完成了設計。目前600 MW、1 000 MW 級機組的協調系統中,均可使用鍋爐過程加速BIR 控制功能。文中介紹的方法具有較強的實用性,通過工程設計和現場試驗,現場技術人員可利用此方法在協調控制系統中增加此項功能并不斷完善和優化控制參數,以滿足不同機組的需求。雖然現階段控制系統外掛各類智能控制、優化算法等產品較多,但對于現場維護人員基本上還是屬于黑箱控制,非專業技術人員無法直接進行調整和優化。文中介紹的BIR 信號組態方法簡單,可調參數較少,便于熱工維護人員理解和調整。如果參數設置得當,能大幅改善鍋爐對負荷指令變化響應較慢的情況,提高機組AGC 響應的及時性。國外先進工業國家對BIR的應用研究已經發展得較為成熟,既有理論指導,又有現場實踐。雖然國內各火力發電機組均采用DCS系統作為控制裝置,且國產DCS系統也已達到世界先進水平,但是在機組控制策略以及進一步挖掘釋放DCS 控制邏輯功能方面仍需深入研究。文中BIR 控制策略和思想不僅局限于鍋爐控制,對工業控制領域中需要快、慢被控對象協同工作的控制系統也有一定的借鑒意義。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
西安航空學院學報(2014年5期)2014-07-13 01:27:52