基于模糊LQR的智能汽車路徑跟蹤控制*
2022-02-18 01:43:56鐘鑫凱陳瑞楠朱令磊徐文才張敏超
汽車工程 2022年1期
胡 杰,鐘鑫凱,陳瑞楠,朱令磊,徐文才,張敏超
(1.武漢理工大學(xué),現(xiàn)代汽車零部件技術(shù)湖北省重點(diǎn)實(shí)驗(yàn)室,武漢 430070;2.武漢理工大學(xué),汽車零部件技術(shù)湖北省協(xié)同創(chuàng)新中心,武漢 430070;3.新能源與智能網(wǎng)聯(lián)車湖北工程技術(shù)研究中心,武漢 430070)
前言
近年來(lái),智能汽車發(fā)展迅速,在一些封閉場(chǎng)景中已實(shí)現(xiàn)商業(yè)化落地,具有廣闊的前景。智能汽車的路徑跟蹤控制是實(shí)現(xiàn)自動(dòng)駕駛的關(guān)鍵技術(shù)之一,其主要功能是控制車輛的前輪轉(zhuǎn)角,使車輛能夠沿參考路徑行駛,盡可能地減少受控車輛與參考路徑之間的偏差。在非極限工況下,跟蹤精度是路徑跟蹤控制的首要目標(biāo)。
國(guó)內(nèi)外研究人員針對(duì)智能汽車的路徑跟蹤控制問題進(jìn)行了大量研究工作。現(xiàn)有的路徑跟蹤控制方法,可根據(jù)是否采用車輛模型分為兩類。無(wú)模型控制方法不需要建立車輛模型,忽略車輛特性,直接根據(jù)車輛與參考路徑之間的偏差計(jì)算前輪轉(zhuǎn)角,包括PID 控制方法和模糊控制方法等;基于模型的控制方法需要建立車輛運(yùn)動(dòng)學(xué)或動(dòng)力學(xué)模型,充分考慮車輛的系統(tǒng)特性,包含純追蹤控制方法、Stanley 控制方法、MPC 控制方法和LQR 控制方法等。
上述路徑跟蹤控制方法中,LQR 控制方法能夠兼顧多項(xiàng)性能指標(biāo),在中低車速工況下具有較好的控制效果;并且具有較好的實(shí)時(shí)性,對(duì)硬件設(shè)備要求低,能夠滿足工程實(shí)踐的需要。因此,許多研究人員對(duì)LQR 路徑跟蹤控制方法開展了深入研究。文獻(xiàn)[11]中基于LQR 提出了前輪轉(zhuǎn)角與橫擺力矩的集成控制策略,該策略具有較好的跟蹤精度與橫向穩(wěn)定性。為了減小LQR 控制器的穩(wěn)態(tài)誤差,文獻(xiàn)[12]和文獻(xiàn)[13]中構(gòu)建了加入前饋控制的LQR 控制器,相較于未帶前饋控制的LQR 控制器,有效減少了跟蹤誤差。更進(jìn)一步,文獻(xiàn)[14]中針對(duì)LQR 控制器權(quán)重固定的問題,提出了基于跟蹤偏差的權(quán)重調(diào)整策略,再次提升了LQR 控制器的精確性。
雖然加入前饋控制對(duì)LQR 控制器進(jìn)行轉(zhuǎn)角補(bǔ)償,可以在一定程度上提高跟蹤精度,但前饋控制和LQR 控制器都是基于同一簡(jiǎn)化系統(tǒng)模型,存在較大的局限性。實(shí)際車輛是一個(gè)復(fù)雜系統(tǒng),前饋控制不能有效減少由于系統(tǒng)參數(shù)不確定性所導(dǎo)致的跟蹤誤差。同時(shí),系統(tǒng)以質(zhì)心為控制點(diǎn),前饋控制相對(duì)滯后,可能產(chǎn)生超調(diào),導(dǎo)致車輛轉(zhuǎn)角頻繁變動(dòng),行駛穩(wěn)定性變差。此外,不同的車速條件下,同一控制轉(zhuǎn)角引起的車輛位置變動(dòng)不同。因此,即使路徑偏差相同,也需要控制器根據(jù)車速變化輸出相應(yīng)控制轉(zhuǎn)角。由于簡(jiǎn)化建模、系統(tǒng)參數(shù)不確定以及執(zhí)行機(jī)構(gòu)響應(yīng)滯后等問題,LQR 控制器自身并不能很好地適應(yīng)車速變化,固定的權(quán)重參數(shù)無(wú)法保證不同車速下控制效果。
針對(duì)上述問題,本文中設(shè)計(jì)了一種帶預(yù)瞄PID的模糊LQR 路徑跟蹤控制器。首先建立了路徑跟蹤誤差模型,在此基礎(chǔ)上設(shè)計(jì)了LQR 控制器,并采用預(yù)瞄PID 的方法對(duì)LQR 控制器進(jìn)行轉(zhuǎn)角補(bǔ)償,減小穩(wěn)態(tài)誤差;然后分析車速變化對(duì)于控制效果的影響,提出了基于車速的權(quán)重參數(shù)模糊調(diào)節(jié)策略,對(duì)權(quán)重參數(shù)進(jìn)行自適應(yīng)調(diào)節(jié),以此保證不同車速下的控制效果;最后,通過實(shí)車試驗(yàn)平臺(tái)對(duì)設(shè)計(jì)的控制器進(jìn)行對(duì)比分析,驗(yàn)證其準(zhǔn)確有效。
1 路徑跟蹤誤差模型
1.1 車輛動(dòng)力學(xué)模型
智能汽車的路徑跟蹤控制,主要涉及車輛的側(cè)向運(yùn)動(dòng)與橫擺運(yùn)動(dòng),為簡(jiǎn)化計(jì)算,假設(shè)車輛同軸車輪具有相同的側(cè)偏剛度與轉(zhuǎn)角,由此可以合并同軸車輪,采用2 自由度單軌車輛模型作為車輛模型,如圖1所示。
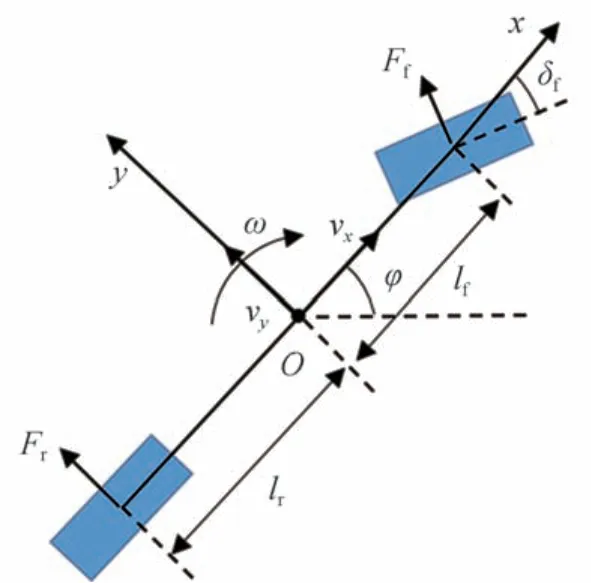
圖1 車輛動(dòng)力學(xué)模型
假設(shè)車輛勻速行駛,且前輪轉(zhuǎn)角較小,分析車輛受力情況,可以得到:

式中:為整車質(zhì)量;a為車輛的側(cè)向加速度;F、F分別為車輛的前、后輪胎所受側(cè)向力;I為車輛繞垂線方向的轉(zhuǎn)動(dòng)慣量;為車輛的橫擺角速度;、分別為車輛前、后軸與質(zhì)心的距離。
在附著條件良好、車速較低的常規(guī)工況下,車輛的輪胎側(cè)偏角較小,可認(rèn)為輪胎所受側(cè)向力與側(cè)偏角成線性關(guān)系。由此,得到車輛動(dòng)力學(xué)模型:
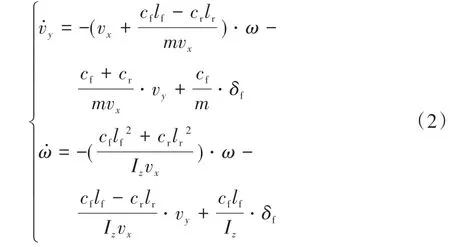
式中:v、v分別為車輛的縱、橫向車速;、分別為車輛前、后軸車輪的側(cè)偏剛度;為前輪轉(zhuǎn)角。
1.2 路徑跟蹤誤差模型
智能汽車跟蹤參考路徑時(shí),主要考慮側(cè)向誤差和航向誤差。如圖2 所示,定義車輛質(zhì)心到參考路徑的最短距離為側(cè)向誤差e,車輛航向角與參考航向角之差為航向誤差e。
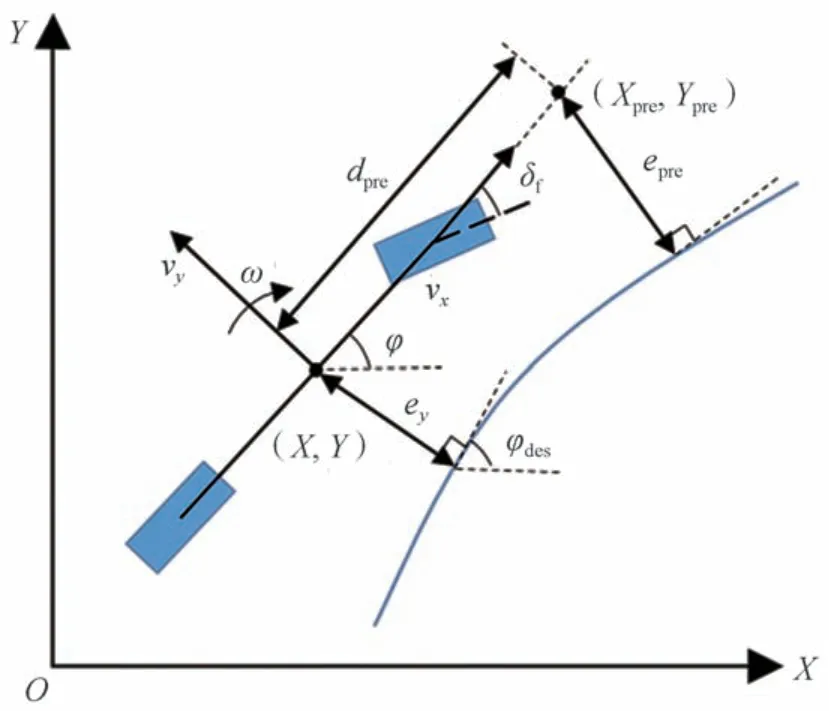
圖2 路徑跟蹤誤差模型
假設(shè)航向誤差較小,可以得到航向誤差和側(cè)向速度誤差:

式中:為車輛當(dāng)前航向角;為參考航向角。
假設(shè)參考路徑的轉(zhuǎn)彎半徑為,可以得到車輛的參考側(cè)向加速度為

車輛的實(shí)際加速度為

根據(jù)式(5)和式(6),可以得到側(cè)向加速度誤差為

綜合上述內(nèi)容,可以得到
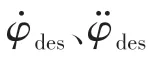

其中:
2 路徑跟蹤控制器
路徑跟蹤控制器的整體結(jié)構(gòu)如圖3 所示。首先基于路徑跟蹤誤差模型,設(shè)計(jì)LQR 控制器作為路徑跟蹤控制器的主體部分,使車輛基本按照參考路徑行駛;在此基礎(chǔ)上,采用預(yù)瞄PID 方法作為轉(zhuǎn)角補(bǔ)償,消除由于系統(tǒng)簡(jiǎn)化與參數(shù)失準(zhǔn)導(dǎo)致的穩(wěn)態(tài)誤差,同時(shí)避免由于響應(yīng)滯后而產(chǎn)生的超調(diào);最后,對(duì)LQR控制器的權(quán)重參數(shù)進(jìn)行模糊調(diào)節(jié),提升控制器對(duì)于車速的適應(yīng)性。
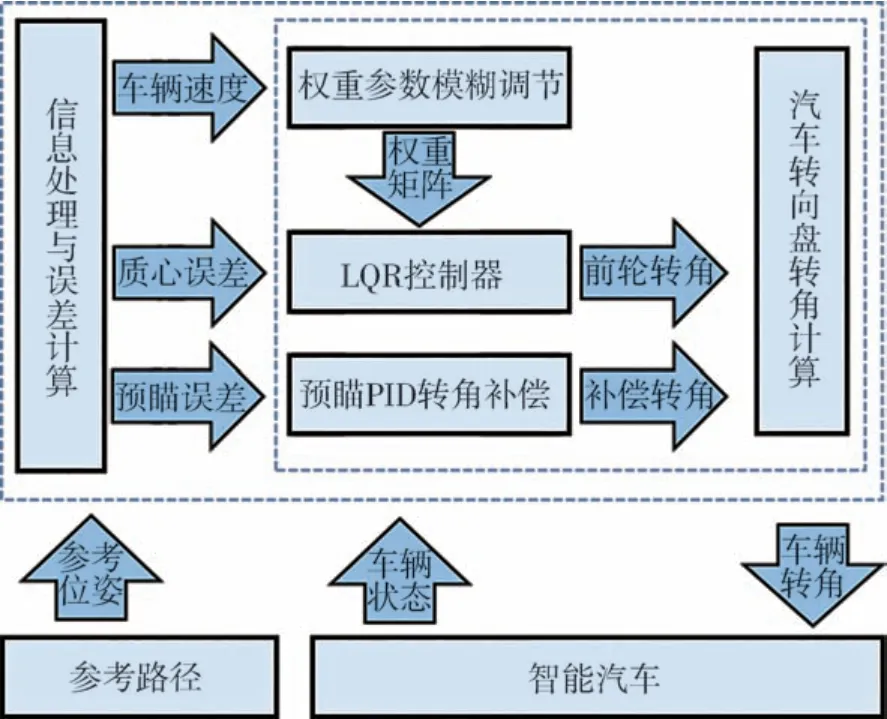
圖3 路徑跟蹤控制器結(jié)構(gòu)
2.1 LQR控制器
LQR 控制器針對(duì)離散系統(tǒng)進(jìn)行控制,因此設(shè)定控制步長(zhǎng)為,選擇雙線性離散化的方法,將連續(xù)的狀態(tài)空間方程轉(zhuǎn)換為離散系統(tǒng),可以得到:

式中:=(-/2)(+/2);=;()為時(shí)刻的狀態(tài)量;()為時(shí)刻的控制量。
LQR控制器的控制目的不僅需要減小車輛的路徑跟蹤誤差,還需要保持控制量盡可能小,以保證車輛行駛的穩(wěn)定性。由此,定義如下目標(biāo)函數(shù):

式中:為狀態(tài)量;為控制量;為狀態(tài)量權(quán)重矩陣;為控制量權(quán)重矩陣。
假設(shè)LQR控制器的控制律為

式中為控制增益系數(shù)。
將式(13)代入式(12),可以得到:

假設(shè)存在一常量矩陣,使系統(tǒng)趨于穩(wěn)定,可以得到:

式中為如下Riccati方程的正定解:

2.2 預(yù)瞄PID轉(zhuǎn)角補(bǔ)償

預(yù)瞄PID 控制方法不依賴于系統(tǒng)建模,直接針對(duì)誤差進(jìn)行控制,在小范圍內(nèi)具有良好的穩(wěn)定性,采用此方法進(jìn)行小角度的轉(zhuǎn)角補(bǔ)償,能夠有效彌補(bǔ)由于系統(tǒng)簡(jiǎn)化和參數(shù)失準(zhǔn)導(dǎo)致的穩(wěn)態(tài)誤差。此外,由于加入了預(yù)瞄距離,控制器存在一定預(yù)見性,可以有效改善轉(zhuǎn)向滯后問題,避免超調(diào)。
如圖2 所示,智能汽車的預(yù)瞄距離為,其數(shù)值大小與車速相關(guān),具體如下:

式中:為基礎(chǔ)預(yù)瞄距離;為預(yù)瞄時(shí)長(zhǎng)。
由此,可以確定預(yù)瞄點(diǎn)位置:

式中:、為智能汽車質(zhì)心的縱、橫向位置;、為預(yù)瞄點(diǎn)縱、橫向位置;為車輛航向角。
定義預(yù)瞄點(diǎn)與參考路徑之間的最短距離為預(yù)瞄誤差,預(yù)瞄PID 控制器直接針對(duì)離散系統(tǒng)的誤差進(jìn)行控制,控制步長(zhǎng)與LQR 控制器保持一致,具體如下:
式中:為預(yù)瞄PID 控制器輸出的補(bǔ)償轉(zhuǎn)角;、、分別為比例、積分、微分常數(shù);()為時(shí)刻的預(yù)瞄偏差。
綜合上述內(nèi)容,可以得到控制系統(tǒng)最終輸出至智能汽車的轉(zhuǎn)向盤轉(zhuǎn)角為

式中表示車輛轉(zhuǎn)向機(jī)構(gòu)的傳動(dòng)比。
2.3 權(quán)重參數(shù)模糊調(diào)節(jié)
實(shí)車環(huán)境中,系統(tǒng)復(fù)雜,與理想條件差別較大,車速變化會(huì)對(duì)路徑跟蹤控制器的控制效果造成較大影響。固定權(quán)重的控制器無(wú)法較好地適應(yīng)車速變化,在不同車速條件下保持良好的控制效果。針對(duì)此問題,本文中采用模糊控制方法實(shí)現(xiàn)對(duì)LQR 控制器權(quán)重參數(shù)的自適應(yīng)調(diào)節(jié),保證不同車速條件下的跟蹤性能。
2.3.1 變量設(shè)計(jì)
LQR 控制器包含兩個(gè)權(quán)重矩陣和,分別對(duì)應(yīng)狀態(tài)量與控制量,可以描述為

式中:、、、分別為側(cè)向誤差、側(cè)向速度誤差、航向誤差、航向角速度誤差的權(quán)重參數(shù);為前輪轉(zhuǎn)角的權(quán)重參數(shù)。
智能汽車跟蹤參考路徑時(shí),控制器主要針對(duì)側(cè)向誤差、航向誤差和前輪轉(zhuǎn)角3 個(gè)變量進(jìn)行控制,兼顧準(zhǔn)確性與穩(wěn)定性。權(quán)重參數(shù)越大,其對(duì)相應(yīng)變量的限制作用越強(qiáng),權(quán)重參數(shù)的相對(duì)大小決定了控制器對(duì)各變量的控制程度。誤差的權(quán)重參數(shù)越大,跟蹤精度越高;轉(zhuǎn)角的權(quán)重參數(shù)越大,轉(zhuǎn)角變化越小,駕駛的穩(wěn)定性與舒適性更好。在低車速條件下,車輛行駛平穩(wěn),應(yīng)增大誤差權(quán)重,以保障跟蹤精度為主。在高車速條件下,車輛短時(shí)間的位置變動(dòng)較大,轉(zhuǎn)角過大容易導(dǎo)致超調(diào),所以應(yīng)增大轉(zhuǎn)角權(quán)重,加強(qiáng)對(duì)前輪轉(zhuǎn)角的限制,防止車輛因超調(diào)而左右搖擺,導(dǎo)致車輛的跟蹤精度與行駛穩(wěn)定性變差。
根據(jù)上述分析,本文中將、置為0,同時(shí)設(shè)定為固定值,通過調(diào)節(jié)和,改變權(quán)重的相對(duì)大小,實(shí)現(xiàn)控制器對(duì)于車速變化的自適應(yīng)。設(shè)定模糊調(diào)節(jié)的輸入變量為車速v,輸出變量為控制系數(shù)、的調(diào)整量,表示為Δ、Δ。各變量取值范圍如表1所示。
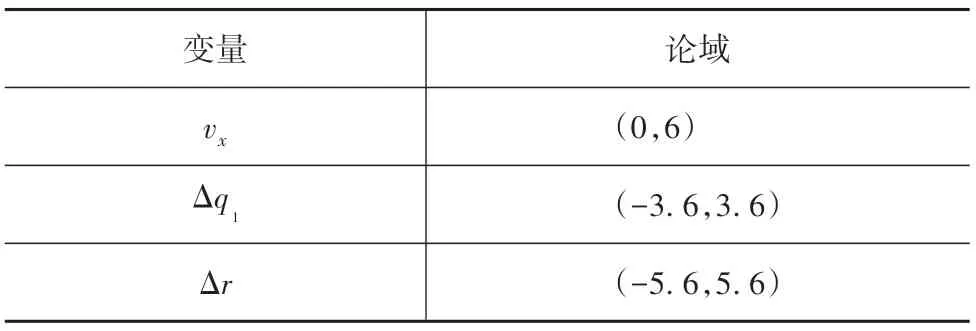
表1 變量論域
2.3.2 模糊化處理
模糊語(yǔ)言變量集劃分為5 個(gè)模糊子集:負(fù)大(NB),負(fù)小(NS),零(O),正小(PS),正大(PB)。隸屬度函數(shù)為高斯型函數(shù),具體如下:

式中:為變量;和為參數(shù)。
分別對(duì)輸入與輸出變量進(jìn)行模糊化處理,結(jié)果如圖4所示。
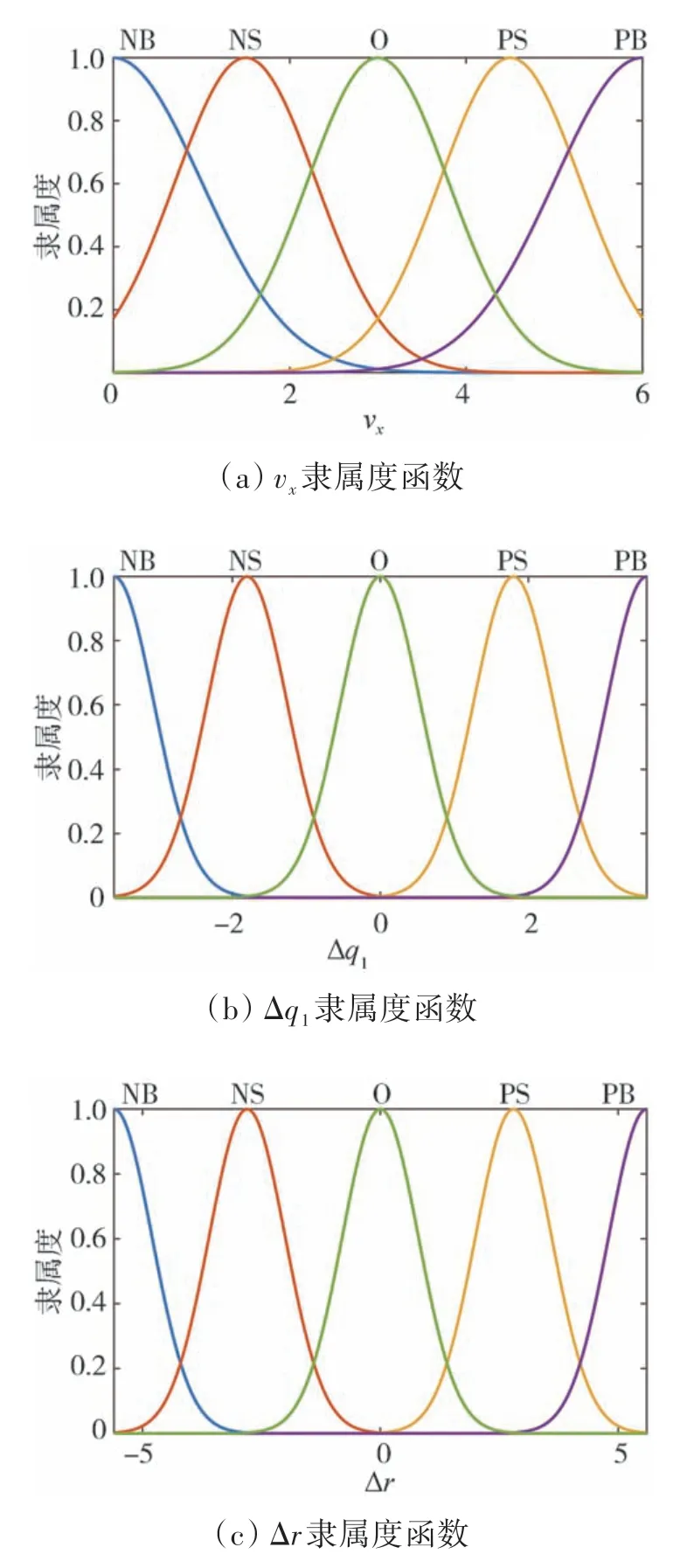
圖4 隸屬度函數(shù)
2.3.3 模糊規(guī)則與解模糊
智能汽車的車速越高,對(duì)前輪轉(zhuǎn)角的限制程度應(yīng)越大,保持行駛穩(wěn)定,防止超調(diào)振蕩,具體模糊規(guī)則如表2所示。

表2 模糊規(guī)則
根據(jù)制定的模糊規(guī)則,輸入量經(jīng)模糊推理后,可得到模糊輸出量,選擇質(zhì)心法解模糊,得到精確輸出量Δ、Δ。

式中、分別為基準(zhǔn)車速下側(cè)向誤差、前輪轉(zhuǎn)角的最優(yōu)權(quán)重參數(shù)。
最后,得到不同車速下的最優(yōu)權(quán)重矩陣:

式中、、分別為基準(zhǔn)車速下側(cè)向速度誤差、航向誤差和航向角速度誤差的最優(yōu)權(quán)重參數(shù)。
3 實(shí)車試驗(yàn)
為驗(yàn)證設(shè)計(jì)的路徑跟蹤控制器,基于實(shí)車試驗(yàn)平臺(tái)對(duì)其進(jìn)行試驗(yàn)測(cè)試。
所用的實(shí)車試驗(yàn)平臺(tái)由純電動(dòng)線控乘用車底盤改裝而來(lái),加裝了攝像頭、毫米波雷達(dá)、激光雷達(dá)、GPS、IMU等高性能傳感器,如圖5(a)所示。
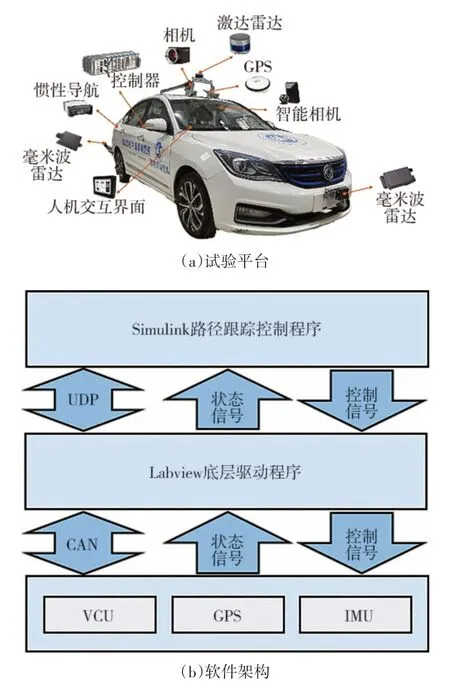
圖5 實(shí)車試驗(yàn)平臺(tái)與軟件架構(gòu)
整車的結(jié)構(gòu)參數(shù)如表3所示。
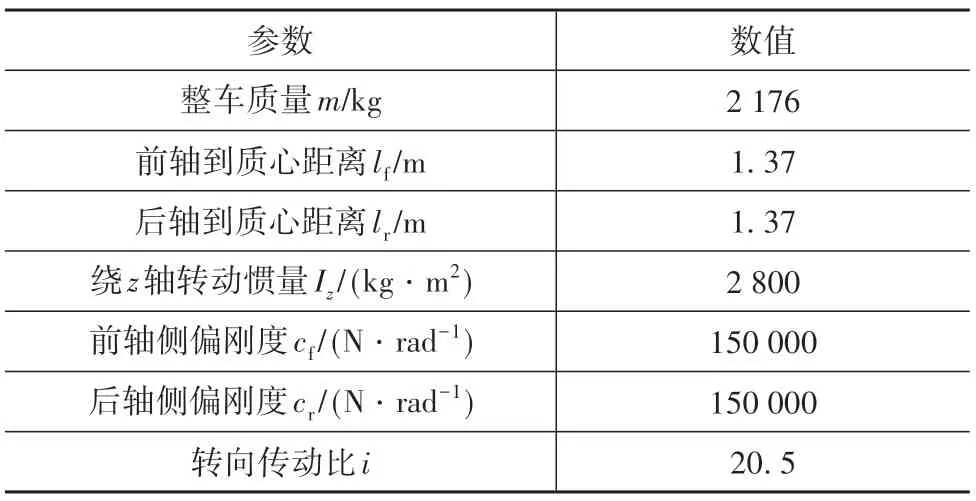
表3 整車結(jié)構(gòu)參數(shù)
實(shí)車試驗(yàn)平臺(tái)的軟件架構(gòu)如圖5(b)所示,為便于實(shí)時(shí)調(diào)整,采用分層控制結(jié)構(gòu)。上層路徑跟蹤控制程序采用Simulink 編寫,部署在PC 上,通過UDP與底層驅(qū)動(dòng)程序通信;GPS、IMU、車輛VCU 控制等模塊的驅(qū)動(dòng)程序采用LabVIEW 編寫,部署在NI控制器中,通過CAN 報(bào)文與硬件設(shè)備進(jìn)行通信,實(shí)時(shí)接收傳感器信號(hào)并控制車輛。
試驗(yàn)場(chǎng)地為校園內(nèi)一封閉練車場(chǎng),采用Fishhook 型路徑。車輛轉(zhuǎn)角由路徑跟蹤器控制,車速采用PID控制,控制頻率均為50 Hz。
3.1 轉(zhuǎn)角補(bǔ)償效果試驗(yàn)
為進(jìn)行對(duì)比分析,分別設(shè)計(jì)了無(wú)轉(zhuǎn)角補(bǔ)償?shù)腖QR 控制器和帶前饋控制的LQR 控制器,與本文中設(shè)計(jì)的控制器同時(shí)進(jìn)行路徑跟蹤試驗(yàn)。車速設(shè)定為3 m/s,LQR 控制權(quán)重均為當(dāng)前車速下的最優(yōu)權(quán)重參數(shù)。試驗(yàn)結(jié)果如圖6~圖8所示。
圖6顯示了在3種控制器作用下,車輛的實(shí)際行駛路徑與參考路徑的對(duì)比。可以看出,帶預(yù)瞄PID的LQR 控制器對(duì)于參考路徑的跟蹤效果最好,而無(wú)轉(zhuǎn)角補(bǔ)償?shù)腖QR 控制和帶前饋控制的LQR 控制器均存在較大的穩(wěn)態(tài)誤差,其中無(wú)轉(zhuǎn)角補(bǔ)償?shù)腖QR 控制器穩(wěn)態(tài)誤差最大,與參考路徑出現(xiàn)了明顯的偏離,跟蹤效果最差。
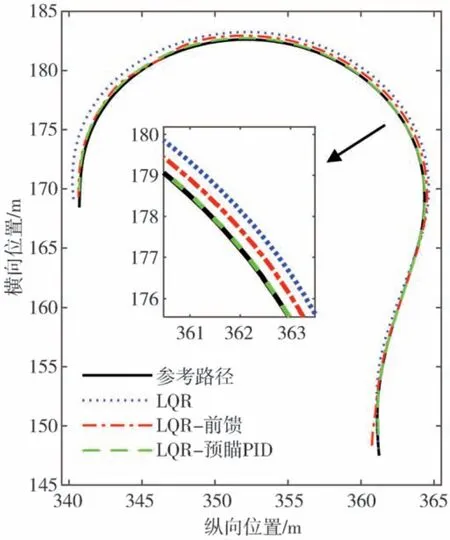
圖6 不同轉(zhuǎn)角補(bǔ)償下的路徑跟蹤結(jié)果
圖7(a)和圖7(b)精確描述了車輛與參考路徑的側(cè)向偏差與航向偏差。可以看出,車輛貼近參考路徑穩(wěn)定行駛后,帶預(yù)瞄PID 的LQR 控制器的跟蹤精度最高,最大側(cè)向偏差在0.14 m 以內(nèi),最大航向偏差在1.35°以內(nèi);無(wú)轉(zhuǎn)角補(bǔ)償?shù)腖QR 控制器跟蹤精度最差,最大側(cè)向偏差達(dá)到0.71 m,最大航向偏差在3.6°左右;帶前饋控制的LQR 控制器雖然最大側(cè)向偏差為0.38 m,但最大航向偏差達(dá)到9.25°,并且車輛航向角出現(xiàn)了高達(dá)16°的擺動(dòng)幅度,轉(zhuǎn)角在短時(shí)間內(nèi)變動(dòng)過大,車輛行駛的穩(wěn)定性較差。
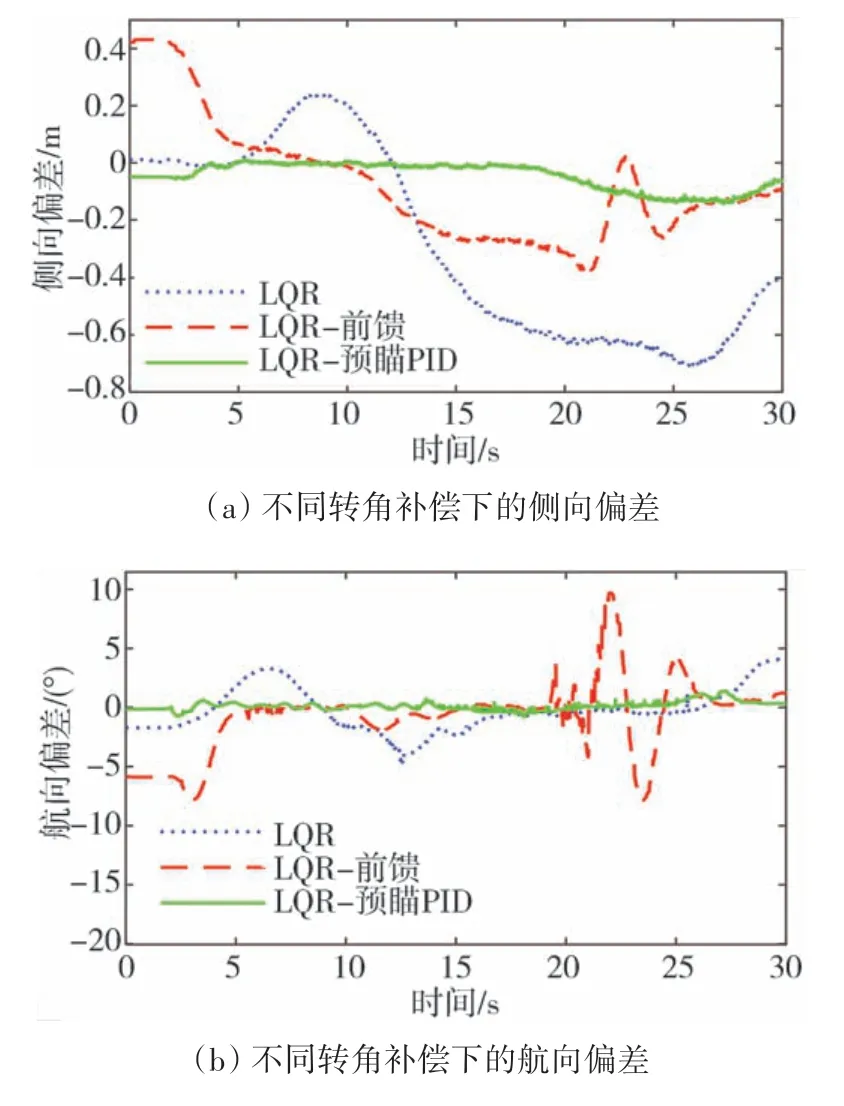
圖7 不同轉(zhuǎn)角補(bǔ)償下的跟蹤誤差
圖8 描述了3 種控制器的輸出控制轉(zhuǎn)角與車輛實(shí)際轉(zhuǎn)角。結(jié)合圖7和圖8可以看出,帶有前饋控制的LQR 控制器雖然減小了一定的穩(wěn)態(tài)誤差,但是由于前饋控制是以車輛質(zhì)心為基準(zhǔn)點(diǎn),控制存在一定的滯后,當(dāng)存在外界擾動(dòng)或曲率增加,導(dǎo)致誤差增大時(shí),轉(zhuǎn)向盤轉(zhuǎn)角出現(xiàn)較大幅度的調(diào)整,出現(xiàn)超調(diào)問題。由圖8(a)可以看出,帶有前饋控制的LQR 控制器的最大輸出轉(zhuǎn)角大達(dá)到500°左右,并且變動(dòng)迅速,而車輛的實(shí)際轉(zhuǎn)角存在一定的響應(yīng)滯后,從而導(dǎo)致車輛不能及時(shí)調(diào)整,進(jìn)一步加劇了超調(diào)問題,使得車輛航向角發(fā)生較大變動(dòng),出現(xiàn)左右擺動(dòng)的現(xiàn)象。
由圖8(b)和圖8(c)可以看出,無(wú)轉(zhuǎn)角補(bǔ)償?shù)腖QR 控制器和帶預(yù)瞄PID 的LQR 控制器輸出的轉(zhuǎn)向盤轉(zhuǎn)角都比較平滑,沒有大幅跳變,車輛的實(shí)際轉(zhuǎn)角與之吻合較好,車輛無(wú)明顯擺動(dòng),穩(wěn)定性較好。
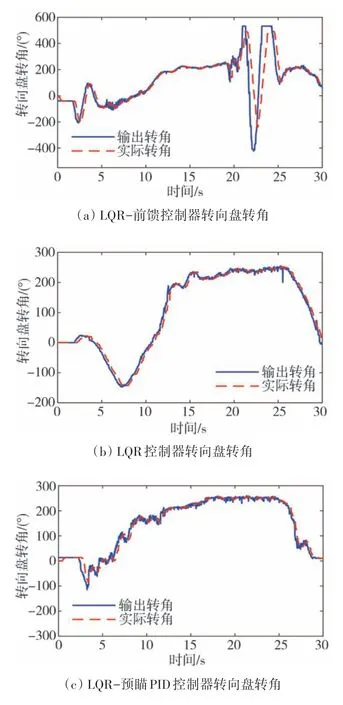
圖8 不同轉(zhuǎn)角補(bǔ)償下的轉(zhuǎn)向盤轉(zhuǎn)角
3.2 權(quán)重參數(shù)模糊調(diào)節(jié)效果試驗(yàn)
為試驗(yàn)對(duì)LQR 控制器權(quán)重參數(shù)進(jìn)行模糊調(diào)節(jié)的效果,在帶預(yù)瞄PID 的LQR 控制器的基礎(chǔ)上,分別采用固定權(quán)重、模糊調(diào)節(jié)權(quán)重兩種方法,在不同車速下試驗(yàn)控制器的控制效果。其中,固定權(quán)重和模糊調(diào)節(jié)的基礎(chǔ)權(quán)重參數(shù)均采用車速為3 m/s 時(shí)的最優(yōu)控制權(quán)重,試驗(yàn)車速為1.5 和4.5 m/s。試驗(yàn)結(jié)果如圖9~圖13所示。
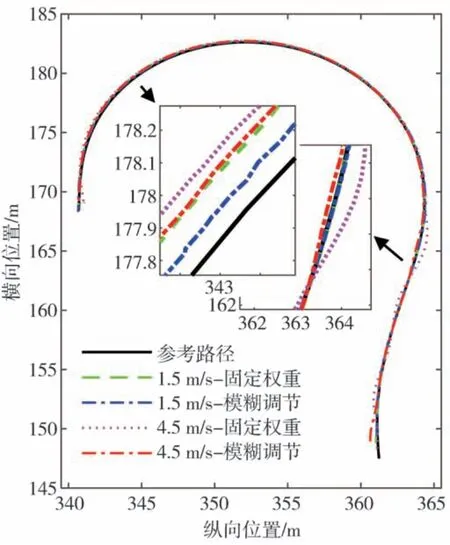
圖9 不同車速下的路徑跟蹤結(jié)果
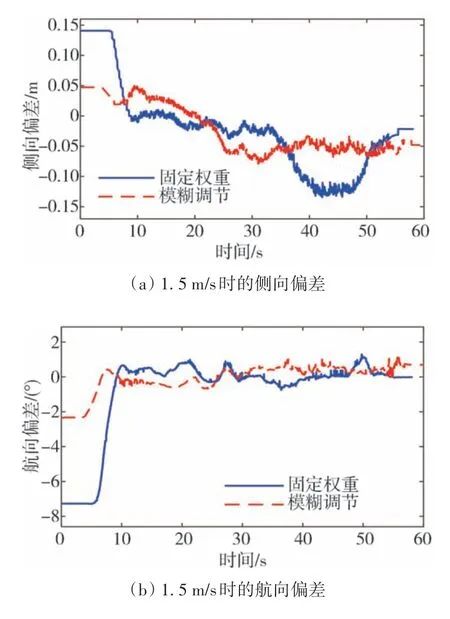
圖10 1.5 m/s時(shí)的跟蹤誤差
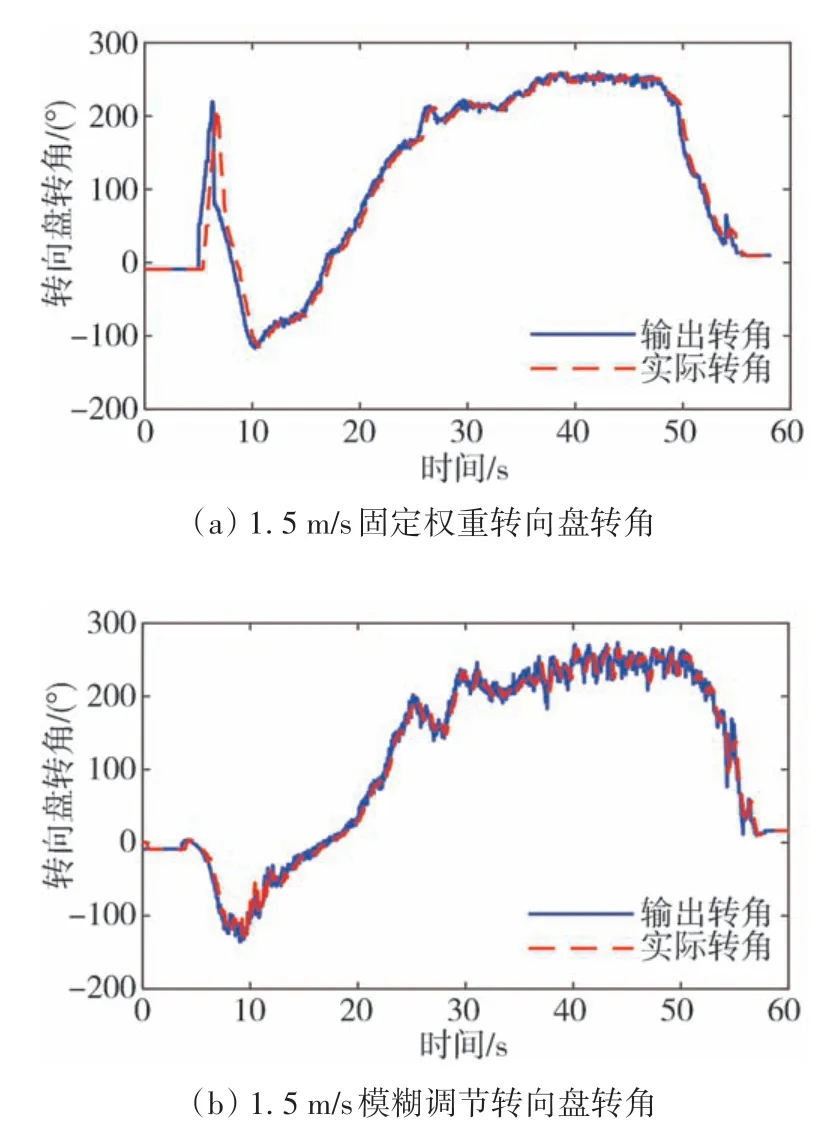
圖11 1.5 m/s時(shí)的轉(zhuǎn)向盤轉(zhuǎn)角
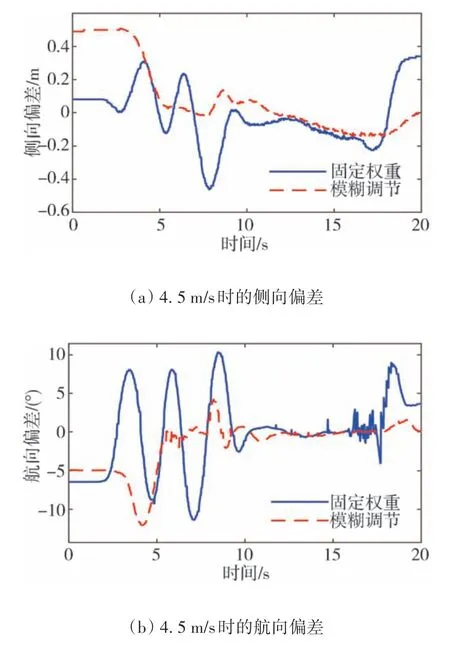
圖12 4.5 m/s時(shí)的跟蹤誤差

圖13 4.5 m/s時(shí)的轉(zhuǎn)向盤轉(zhuǎn)角
圖9 顯示了車輛在不同車速、不同控制器作用下,實(shí)際行駛路徑和參考路徑的對(duì)比。可以看出,在兩種車速條件下,權(quán)重參數(shù)采用模糊調(diào)節(jié)的控制器均具有較好的路徑跟蹤效果,跟蹤精度明顯優(yōu)于同車速下的固定權(quán)重控制器。此外,在同一控制器作用下,車速為4.5 m/s時(shí)的跟蹤精度比1.5 m/s時(shí)差,尤其是采用固定權(quán)重控制器時(shí),4.5 m/s 車速下車輛出現(xiàn)了明顯的振蕩,轉(zhuǎn)角頻繁變化,嚴(yán)重影響到車輛的穩(wěn)定性。這是由于固定權(quán)重控制器沒有隨著車速提高而相應(yīng)增加對(duì)控制量的限制導(dǎo)致的,較高車速下,即使保持低速時(shí)相同的轉(zhuǎn)向盤轉(zhuǎn)角,車輛在控制時(shí)域內(nèi)產(chǎn)生的位置變動(dòng)也會(huì)更大,從而發(fā)生超調(diào),產(chǎn)生新的偏差,使得控制器反復(fù)調(diào)整,轉(zhuǎn)角頻繁變動(dòng),車輛出現(xiàn)左右搖擺現(xiàn)象。而權(quán)重參數(shù)采用模糊調(diào)節(jié)的控制器,其控制量權(quán)重隨著車速增加而增大,雖然跟蹤精度相較于低速時(shí)有所降低,但保持了車輛行駛的穩(wěn)定性。
圖10~圖13精確地描述了不同車速下兩種控制器的跟蹤精度與轉(zhuǎn)角變化。
由圖10 可以看出,在1.5 m/s 車速下,權(quán)重參數(shù)采用模糊調(diào)節(jié)的控制器將側(cè)向偏差保持在0.07 m以內(nèi),航向偏差保持在0.8°以內(nèi)。相較于固定權(quán)重控制器,其較好地減小了側(cè)向偏差,實(shí)現(xiàn)了更高的跟蹤精度。圖11 描述了1.5 m/s 車速下,兩種控制器的控制轉(zhuǎn)角與車輛實(shí)際轉(zhuǎn)角。可以看出,為保證更高的跟蹤精度,權(quán)重參數(shù)采用模糊調(diào)節(jié)的控制器對(duì)于轉(zhuǎn)向盤轉(zhuǎn)角的調(diào)節(jié)更加精細(xì),在低車速下,這種微小的調(diào)節(jié)不會(huì)引起車輛左右擺動(dòng),不會(huì)對(duì)車輛的穩(wěn)定性造成影響。
由圖12可以看出,在4.5 m/s車速下,固定權(quán)重控制器的側(cè)向偏差和航向偏差均出現(xiàn)了大幅度的振蕩現(xiàn)象,側(cè)向偏差最大振幅達(dá)到0.64 m,航向偏差最大振幅達(dá)到19°,且跟蹤誤差的收斂時(shí)間較長(zhǎng),車輛長(zhǎng)時(shí)間未進(jìn)入穩(wěn)定狀態(tài),跟蹤精度與跟蹤穩(wěn)定性很差。而權(quán)重參數(shù)采用模糊調(diào)節(jié)的控制器可以快速收斂跟蹤誤差,無(wú)大幅波動(dòng),最大側(cè)向偏差為0.15 m,最大航向偏差在3°左右,路徑跟蹤的精度與穩(wěn)定性都比較好。
由圖13(a)可以看出,固定權(quán)重控制器為了減小跟蹤誤差,其輸出的轉(zhuǎn)向盤轉(zhuǎn)角過大,而車輛的轉(zhuǎn)向機(jī)構(gòu)的響應(yīng)較為滯后,在車速較高的工況下,這導(dǎo)致車輛與理想位置存在較大偏差,使得控制器對(duì)轉(zhuǎn)向盤轉(zhuǎn)角進(jìn)行反復(fù)調(diào)節(jié),從而引起振蕩,難以收斂。而由圖13(b)可以看出,權(quán)重參數(shù)采用模糊調(diào)節(jié)的控制器由于針對(duì)高速調(diào)節(jié)了控制器權(quán)重,其輸出的轉(zhuǎn)向盤轉(zhuǎn)角較小,有效避免了響應(yīng)滯后與超調(diào)現(xiàn)象,不僅保證了車輛行駛的平穩(wěn),同時(shí)還保證了足夠的跟蹤精度。
4 結(jié)論
本文中設(shè)計(jì)了一種智能汽車的路徑跟蹤控制器,采用LQR 控制器作為主體部分,并使用預(yù)瞄PID方法進(jìn)行轉(zhuǎn)角補(bǔ)償,提高跟蹤精度,同時(shí)根據(jù)車速對(duì)LQR 控制器的權(quán)重參數(shù)進(jìn)行模糊調(diào)節(jié),保證控制器在不同車速下的跟蹤效果。實(shí)車試驗(yàn)結(jié)果表明,該路徑跟蹤控制器能夠有效克服由于系統(tǒng)簡(jiǎn)化建模和響應(yīng)滯后引起的誤差問題,實(shí)現(xiàn)更加精準(zhǔn)的路徑跟蹤控制,且避免了傳統(tǒng)前饋補(bǔ)償?shù)某{(diào)現(xiàn)象;同時(shí),控制器在不同車速工況下,均能保持較好的跟蹤精度與行駛穩(wěn)定性,具有較強(qiáng)的適應(yīng)性。