基于滑模理論的高速車輛側風穩定性控制研究*
2022-02-18 01:44:24梁寶鈺汪怡平張倩文熊建波胡興軍王靖宇
汽車工程 2022年1期
關鍵詞:模型
梁寶鈺,汪怡平,劉 珣,張倩文,熊建波,胡興軍,王靖宇
(1.武漢理工大學汽車工程學院,武漢 430070;2.武漢理工大學,現代汽車零部件技術湖北省重點實驗室,武漢 430070;3.吉林大學汽車工程學院,長春 130025)
前言
近年來,隨著汽車輕量化、汽車高速行駛時間占比增加以及跨海大橋、高橋隧比高速公路的修建,側向風對汽車行駛安全的影響越來越大。此外,隨著汽車智能化的發展,對高速側風穩定性的主動控制也提出了新的要求。改善車輛側風穩定性的主動控制方法主要有主動前輪轉向控制(active front steering,AFS)、主動懸架控制和直接橫擺力矩控制(direct yaw-moment control,DYC)。其中,DYC 系統可以控制車輛縱向力分配以產生附加橫擺力矩,特別是車輛側向力飽和時,轉向控制效果較差,DYC系統仍可以維持車輛穩定性。
針對DYC 系統,研究人員提出了多種控制算法,如門限值法、比例-積分-微分(PID)控制、神經網絡控制等。滑模控制由于其滑動模態可以設定為與被控對象參數及擾動無關,故對系統干擾和參數攝動具有較強的魯棒性和完全自適應性。受到擾動的高速車輛在基于滑模變結構理論的DYC 系統下,可以獲得更多的穩定性控制效果。
本文中基于搭建的汽車多體動力學(multi-body dynamics,MBD)和計算流體力學(computational fluid dynamics,CFD)雙向耦合控制平臺,針對高速車輛側風穩定性問題,提出一種基于滑模理論的車輛側風穩定性控制系統,分析了在階躍側風下DYC車輛和未受控制車輛的動力學響應、氣動特性和高速車輛車身周圍流場的瞬態特性。
1 計算流體力學仿真
1.1 流動控制方程
汽車為低馬赫數運載工具(<0.3),側風環境下的高速汽車周圍的氣流流動是瞬態變化的,因此該流場為非定常、不可壓縮流場。汽車外流場雷諾數高達10,是充分發展的湍流流場。本文中選用Realizable-模型,它能更好地模擬剪切流和旋轉流,被廣泛應用于各種類型的流動模擬中。
1.2 計算域和網格劃分
車輛運動速度通過重疊網格技術實現。重疊網格采用一組固定背景網格和一套運動受體網格,在不同的兩個區域間傳遞計算信息。在運動對象周圍建立一個小體積的規則“盒子”,稱為重疊區域,計算域中除重疊區域外的其他部分稱為背景區域。在數值模擬過程中,側風下的高速車輛會發生縱向和側向移動,故計算域尺寸應足夠大,計算域總長為48.5 倍車長,寬度為15 倍車寬,高度為7.5 倍車高。計算域中車輛和其周圍的長方體壁面為重疊區域,重疊區域總長為3.5 倍車長,總寬為5 倍車寬,高度為3 倍車高。計算域左側為速度入口,右側為壓力出口,前后兩側為Symmetry 邊界,頂部和底部為Wall邊界。計算初始時刻的重疊區域在整個計算域中的相對位置如圖1所示,為車長,為車寬。
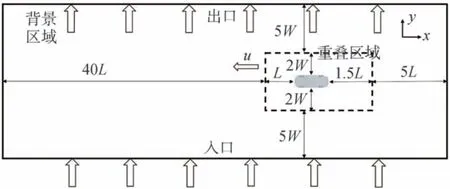
圖1 計算域示意圖
為準確模擬車身周圍流場并減少網格數量,采用局部網格加密的方式減少網格數量。計算域網格如圖2所示。車身周圍網格尺寸為30 mm,邊界層網格總厚度16 mm,層數為4 層,重疊區域加密尺寸為100 mm,重疊區域網格主體尺寸為200~220 mm,背景區域加密尺寸為240 mm,背景區域網格主體尺寸為800 mm。在使用重疊網格時,單位時間步內,重疊網格移動的距離應小于最小網格尺寸,故時間步長設為0.001 s。為保證空氣動力學和汽車多體動力學模型中的氣動六分力作用位置一致,空氣動力學模型計算獲取的氣動六分力均基于車輛車身質心位置。
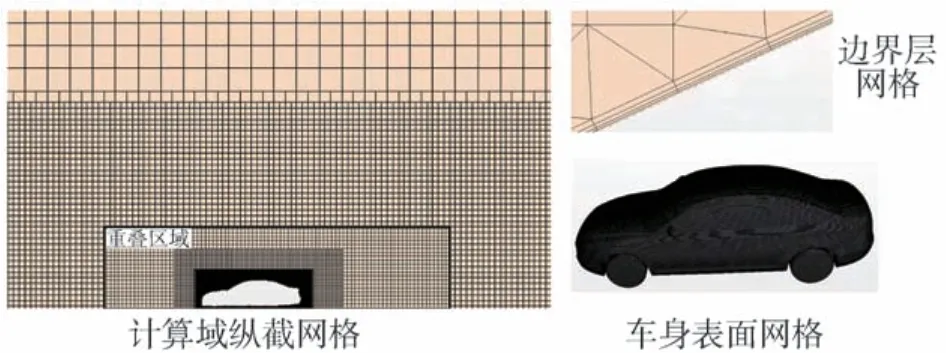
圖2 計算域網格
1.3 單車外流場數值模擬驗證
在湖南大學風工程試驗中心,測量1∶3 縮比的轎車模型的氣動阻力系數,通過與瞬態數值模擬的氣動力系數時均值對比來驗證所采用瞬態數值模擬方案的準確性。
風洞試驗測量得到零偏航角下的氣動力系數,如圖3所示。風速范圍為20~40 m/s,每隔5 m/s采集一次數據,共5組。數值模擬采用重疊網格技術賦予車輛速度,運動的車輛撞擊靜止空氣,相對速度與風洞試驗一致。

圖3 風洞試驗轎車模型
圖4 為數值模擬得到的不同車速下氣動阻力系數的時均值與風洞試驗測量值的對比曲線。風洞試驗的氣動阻力系數平均值約為0.261,數值模擬的氣動阻力系數平均值約為0.256,誤差為2%,說明該數值模擬方案具有較高精度。
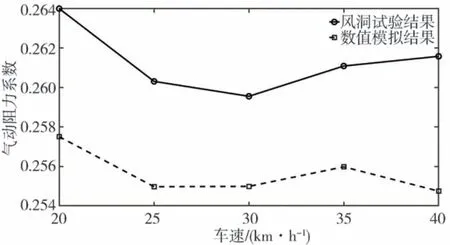
圖4 風洞試驗與數值模擬對比
2 汽車多體動力學仿真
在ADAMS/Car 中建立車輛動力學模型,包括車身系統、前后懸架系統、轉向系統、制動系統及輪胎系統,如圖5 所示。車輛整車參數如表1 所示,路面附著系數為1,輪胎模型采用基于魔術公式Pacejka89 的模型。該模型有68 個運動部件,160 個自由度,能真實地反映車輛的運動狀態。在側風穩定性計算中,車輛轉向盤為鎖死狀態,空氣動力學模型計算得到的氣動六分力加載到車輛車身質心上,汽車多體動力學模型計算的時間步與空氣動力學模型保持一致,為0.001 s。
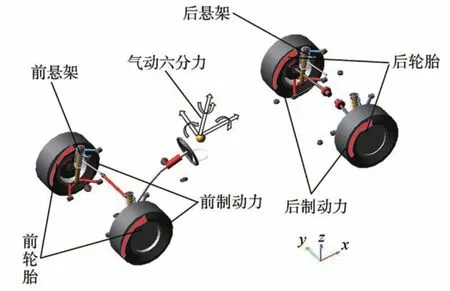
圖5 整車動力學模型
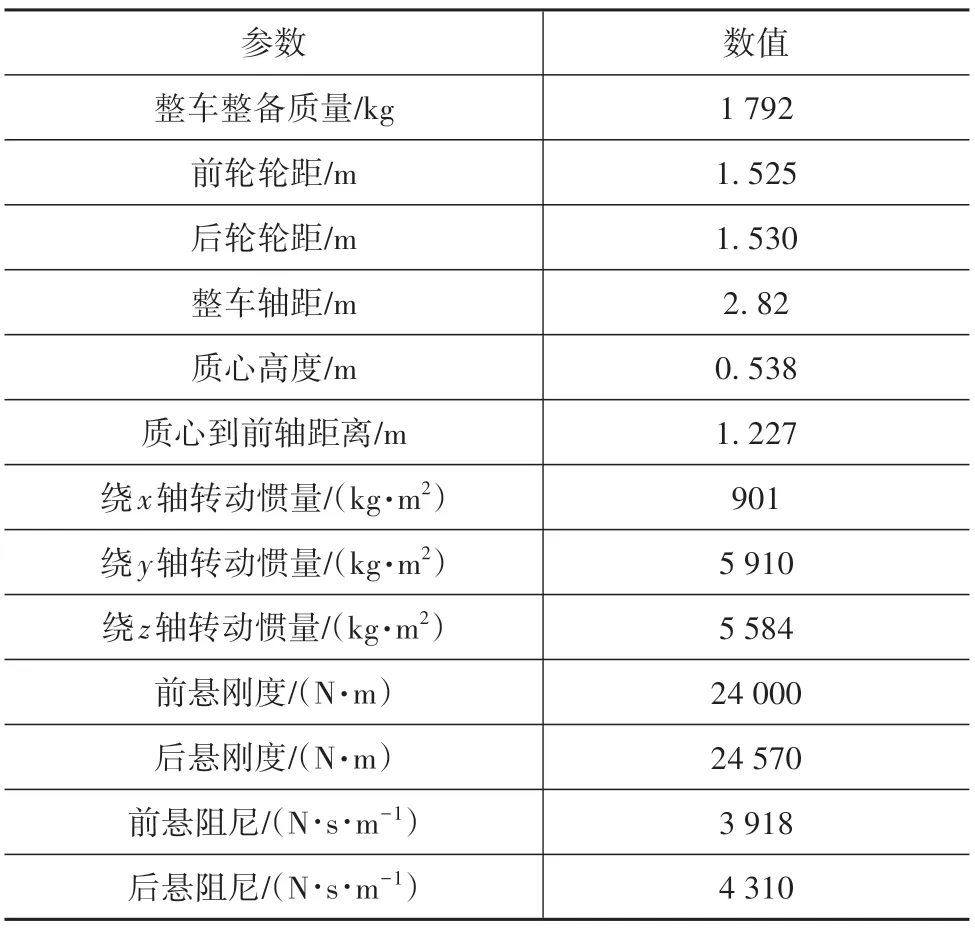
表1 整車參數表
3 CFD-MBD雙向耦合控制平臺
本文中通過CFD 求解器STAR-CCM+、MBD 求解器ADAMS/Car 和MATLAB/Simulink 搭建雙向耦合控制平臺。其中,空氣動力學模型、汽車多體動力學模型分別通過CFD 和MBD 求解器計算,側風穩定控制系統在Simulink 中搭建,并編寫了接口程序實現求解器之間的實時數據交換。
CFD-MBD 雙向耦合控制平臺計算過程如圖6所示。空氣動力學模型和汽車多體動力學模型在耦合前獨立計算0.2 s,當氣動力和動力學響應趨于穩定并收斂后,開始空氣動力學模型、汽車多體動力學模型和Simulink 控制模型間信息交互。空氣動力學模型計算的氣動力、力矩和Simulink 控制模型中計算的各個輪胎制動力矩作為汽車多體動力學模型輸入,利用這些輸入數據進行車輛動力學響應計算。然后給出車輛縱向速度、側向速度和橫擺角速度等動態響應作為空氣動力學模型和Simulink 控制模型輸入,并在空氣動力學模型中更新車輛運動狀態。在新的車輛運動狀態下,再次通過空氣動力學模型和Simulink 控制模型計算車輛氣動力、力矩和各個輪胎制動力矩,完成整個CFD-MBD 雙向耦合控制循環。
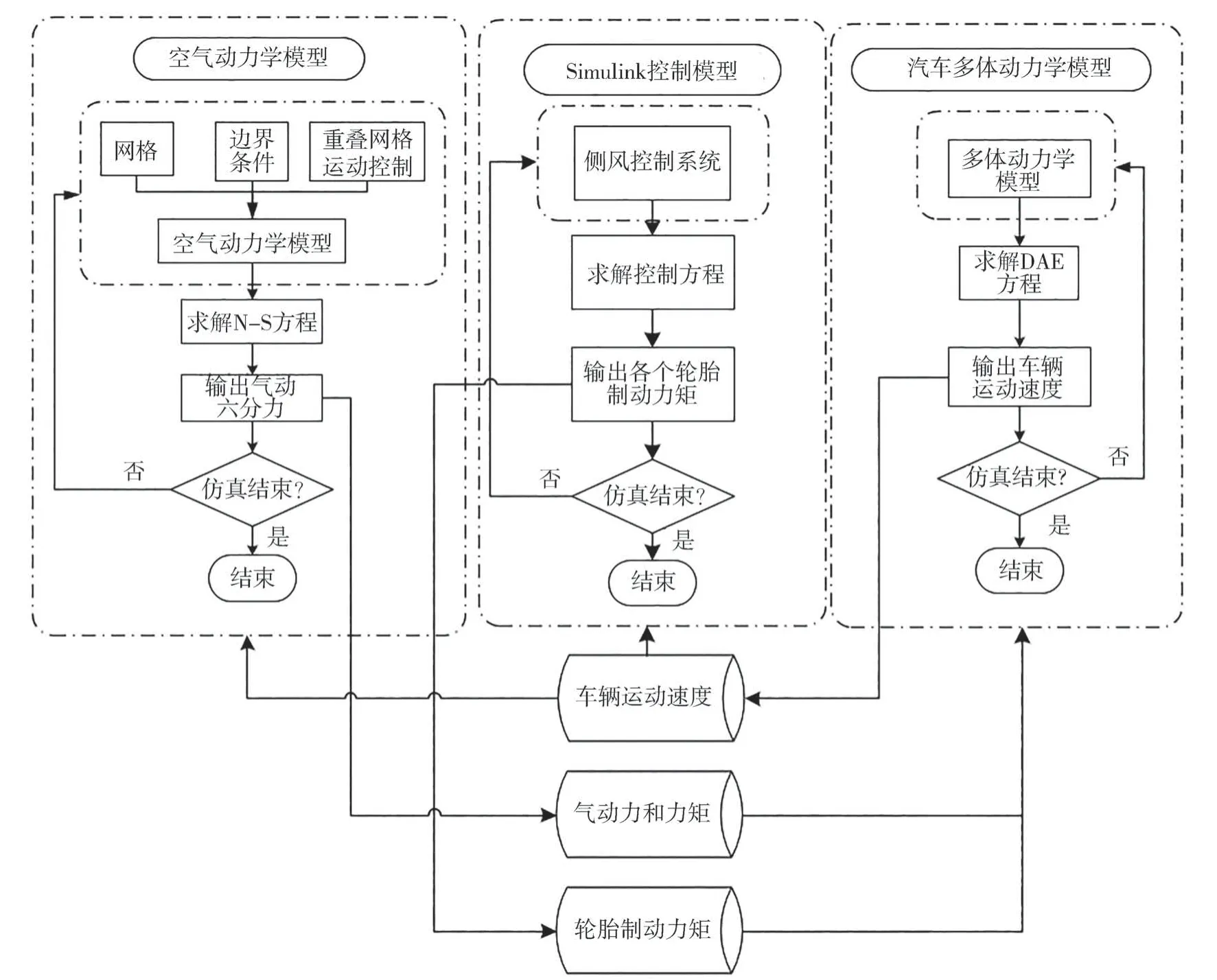
圖6 CFD-MBD雙向耦合控制流程示意圖
4 基于滑模理論的側風穩定性控制系統
4.1 側風穩定性控制系統結構
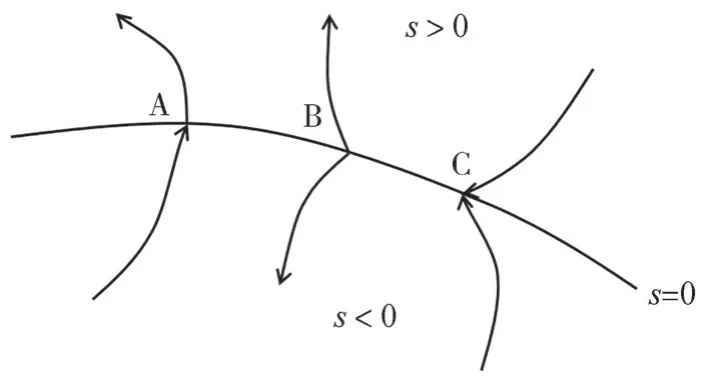
圖7 滑模運動的切換面
基于滑模理論,設計了側風穩定性控制系統(如圖8 所示)。該系統為閉環控制系統,車輛橫擺角速度為控制變量,車輛實際橫擺角速度與理想橫擺角速度之差為反饋變量。通過上層控制器計算出側風干擾下的高速車輛為維持穩定所需的附加橫擺力矩,下層控制器將上層控制器輸出的橫擺力矩分配至各個車輪,從而保持車輛穩定。
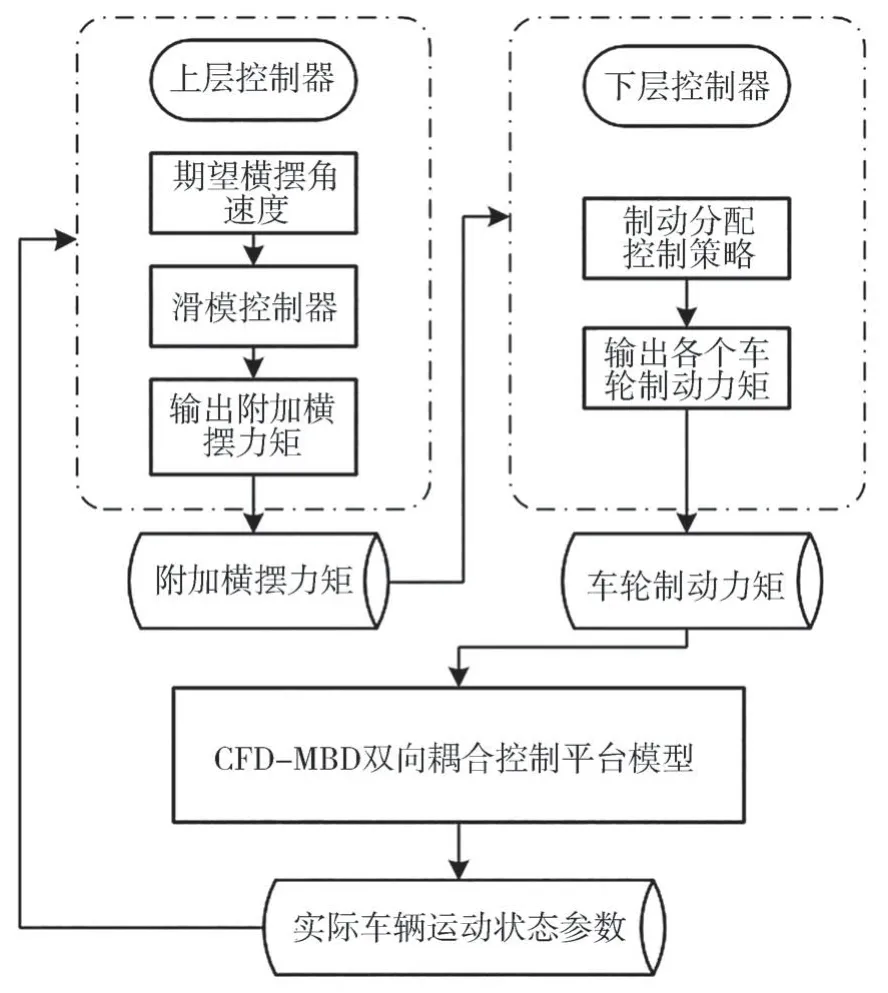
圖8 側風穩定性控制系統結構圖
4.2 上層控制器
強側風作用下,高速車輛常常出現側向偏移和橫擺現象。因此,當上層控制器計算的側風干擾下的高速車輛為維持穩定所需的附加橫擺力矩時,采用包含車輛側向速度和橫擺角速度的2 自由度汽車參考模型,如圖9所示。
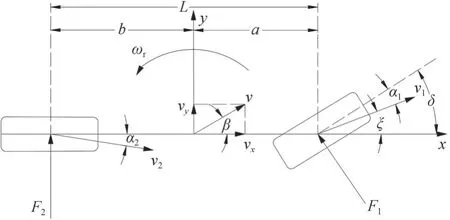
圖9 車輛2自由度模型
考慮附加橫擺力矩M的線性2自由度模型的狀態方程為
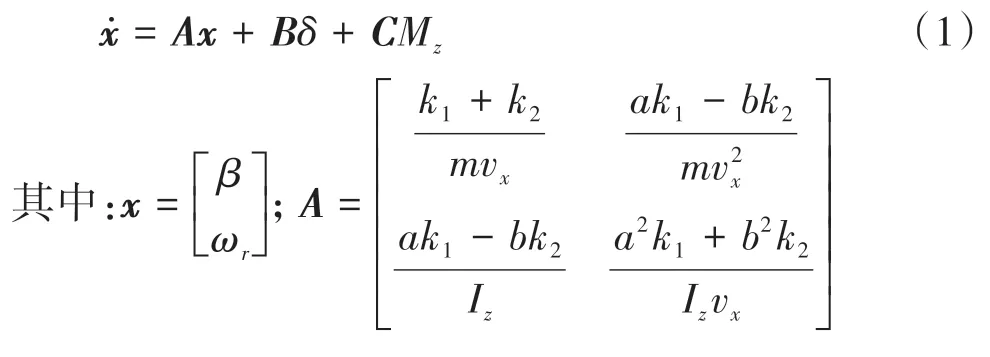
式中:、為前后輪的側偏剛度;為質心側偏角;為前輪轉角;v為車輛方向速度;M為附加橫擺力矩;為質心到前軸的距離;為質心到后軸的距離;I為車輛沿軸的轉動慣量。
考慮側風等擾動,由式(1)可得被控對象橫擺角加速度方程:
式中()為干擾,且|()|≤,為未加控制時測量得到的干擾上限。
滑模函數為

選取跟蹤誤差為

式中:為高速車輛實際橫擺角速度;為高速車輛理想橫擺角速度。本文中考慮車輛直線行駛狀況車輛側風控制問題,選取車輛理想橫擺角速度=0,前輪轉角=0。
對式(3)求導后可得
滑模控制器設計為
式中>0,由于高速車輛側風穩定性控制是具有大階躍的響應控制,能保證當較大時,系統狀態能以較大速度趨近滑動模態。
取Lyapunov函數為

則
取≥,=+,>0,則


式中:為滑動模態切換面的邊界層;=1/。在邊界層之內,采用反饋控制,降低滑動模態快速切換的抖振,并使函數sat()保持在邊界層內;在邊界層之外,采用切換控制,使系統快速趨近于滑動模態。
4.3 下層控制器
下層控制器按照制動力分配策略,將上層控制器輸出的橫擺力矩分配到各個車輪,從而完成整個DYC車輛的控制。當對車輛左前輪、左后輪、右前輪及右后輪施加制動力時,會產生制動力F、F、F和F,所引起的橫擺力矩分別為
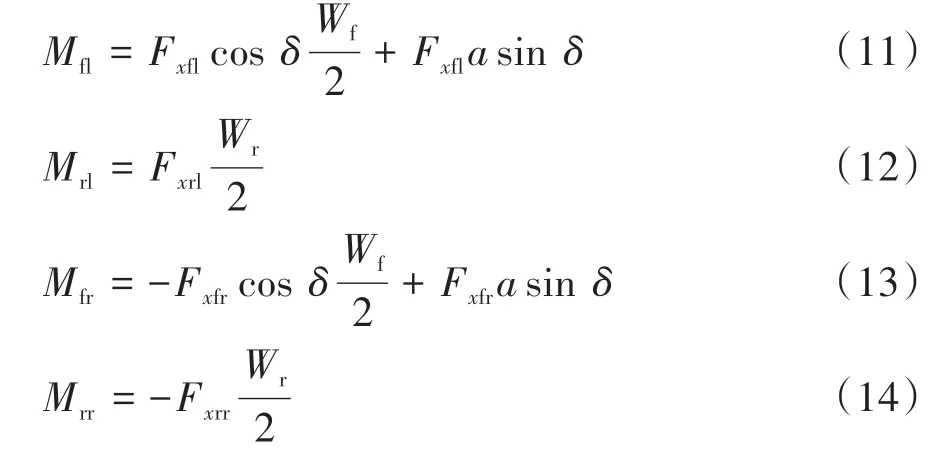
式中:為前軸輪距;為后軸輪距。
DYC 系統的控制方案有單輪控制和雙輪控制。單輪控制精度高,對車輛沖擊較小,舒適度更好;雙輪控制所能產生的橫擺力矩比單輪控制大,在緊急情況下更安全。本文采用單輪制動控制為主,雙輪制動控制為輔的DYC 下層控制策略。針對高速車輛側風下直線行駛工況,DYC 系統下層控制策略如表2所示。T、T、T、T分別為左前輪、左后輪、右前輪、右后輪的制動力矩,若車輛需求為左橫擺力矩,優先讓左前輪制動提供橫擺力矩,當T>800 N·m 時,控制左前輪制動力矩為800 N·m,增加左后輪的制動力矩繼續提供橫擺力矩,控制左后輪最大制動力矩為600 N·m。若車輛需求為右橫擺力矩,優先讓右后輪制動提供橫擺力矩,當T>600 N·m 時,控制右后輪制動力矩為600 N·m,增加右前輪的制動力矩繼續提供橫擺力矩,控制右前輪最大制動力矩為800 N·m。
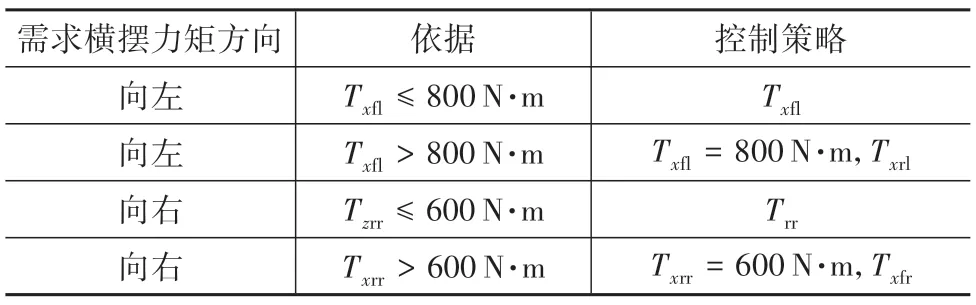
表2 DYC下層控制策略
4.4 控制效果分析
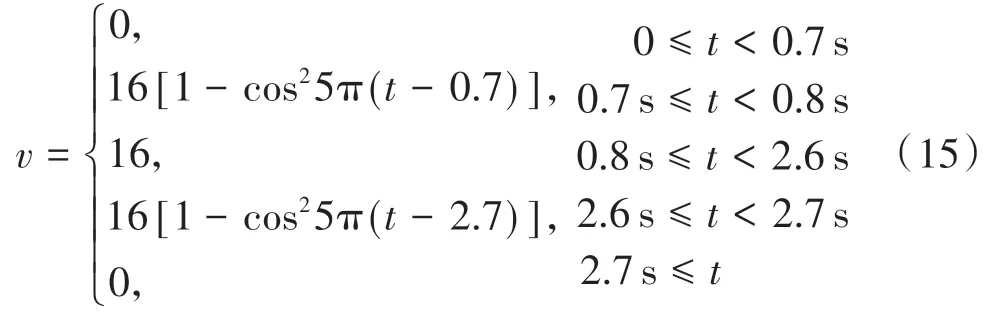
一般認為車速超過100 km/h,為高速行駛狀態,且高速車輛與低速車輛相比,對側風更加敏感,故本文研究的乘用車速度為30 m/s(108 km/h)。轉向盤轉角為0,車輛保持直線行駛狀態,階躍側風作用時間為2 s,側風最大風速取16 m/s。側風表達式如式(15)所示,仿真結果如圖10所示。
由圖10(a)可知:在整個側風過程中,DYC 車輛的橫擺角基本為0,而未受控制車輛的橫擺角最大可達-5.7°。在該側風穩定控制系統下,高速車輛的橫擺角可以得到有效控制。
由圖10(b)可知:DYC 車輛在該階躍側風發生后0.26 s開始,側風穩定性系統開始參與控制,其橫擺角速度與未受控制車輛產生明顯區別。在該側風穩定控制系統的控制下,DYC 車輛的橫擺角速度在實際控制中出現了較小的抖振,抖振幅度較小。在整個側風過程中,未受控制車輛產生較大橫擺角速度,最大可達3.5(°)/s,而DYC 車輛最大橫擺角速度為1.9(°)/s,減少46%。
由圖10(c)和圖10(d)可知:在整個側風過程中,未受控制車輛產生了較大的側向位移和側向速度,最大分別可達4.0 m 和2.5 m/s,而DYC 車輛最大側向位移和側向速度分別為0.41 m 和0.23 m/s,相對未受控制車輛分別改善89.7%和90.8%。在側風結束后,未受控制車輛仍然存在較大的側向速度,側向位移在不斷增加,而DYC 車輛側向位移保持穩定。
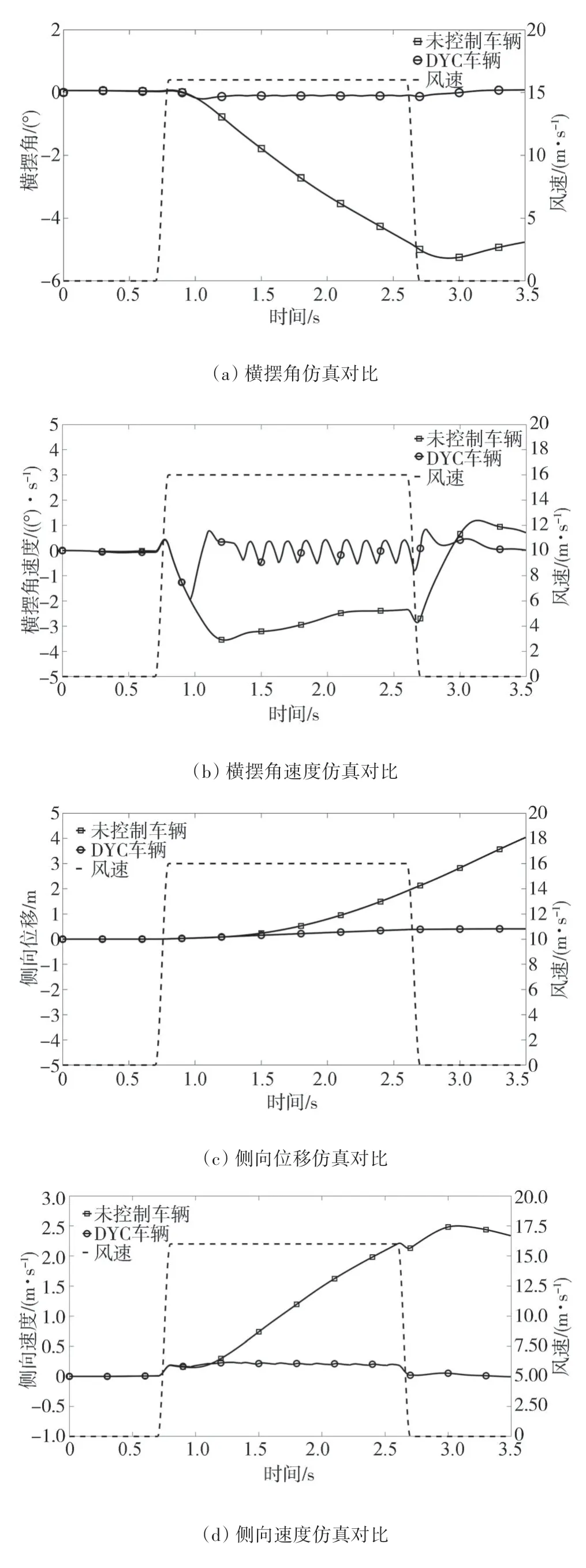
圖10 側風作用下車輛直線行駛仿真結果
4.5 流場分析
通過CFD-MBD 雙向耦合控制平臺對高速車輛進行側風穩定性控制分析,可以捕捉到車輛不同行駛狀態下的氣動力和力矩變化以及不同時刻車身周圍流場的瞬態特性,如圖11和圖12所示。
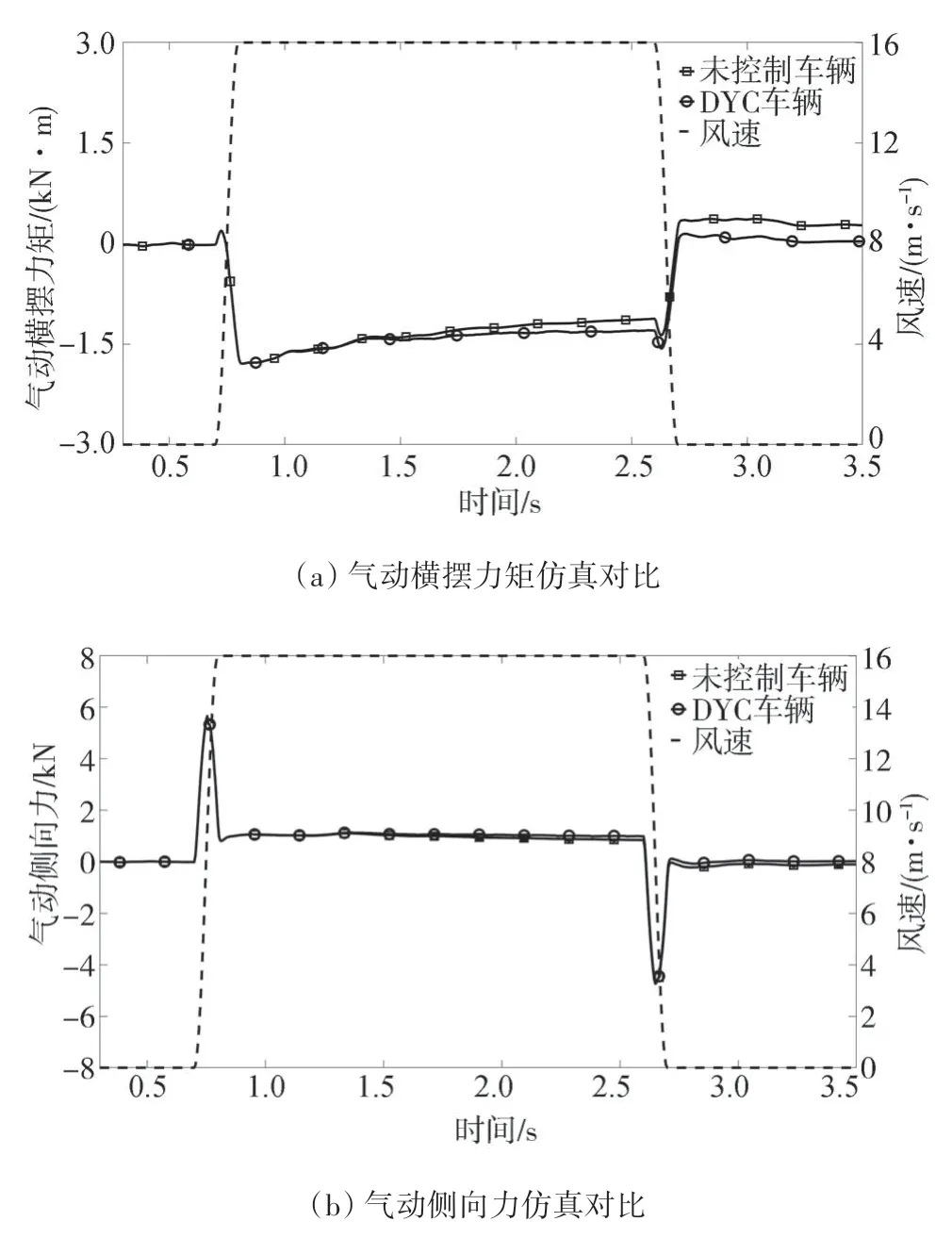
圖11 側風作用下車輛氣動力和力矩仿真結果
由圖11(a)可知:在階躍側風作用的2 s內,DYC車輛相對未受控制車輛產生較大的氣動橫擺力矩,這是由于DYC 車輛在整個側風過程中產生的橫擺角較小,側風作用面較大所致。階躍側風消失后,未受控制車輛仍具有較小反向氣動橫擺力矩,這是由于未受控制車輛在側風消失后仍然存在較小的側向速度和橫擺角所致。
由圖11(b)可知:0.7 s后,側風風速急劇增大到16 m/s,車輛迎風側壓力明顯高于背風側,車輛氣動側向力出現峰值。經2.6 s后,側風風速急劇減小到0,車輛氣動側向力出現反向峰值。這是由于側風的突然消失,迎風側風速急劇減少,背風處風速依然較高所導致。
由圖12 可知:當2.2 s 時,車輛處于階躍側風中,車輛迎風側的C 柱和背風處的A 柱產生負壓區,車頭左側壓力集中,且DYC 車輛迎風側壓力比未控制車輛略大。當=3 s 時,側風消失,DYC 車輛車身表面壓力分布基本對稱,未受控制車輛車身表面右側壓力較大,這導致未受控制車輛在側風消失后會產生較小的反向橫擺力矩。

圖12 未受控制車輛與DYC車輛車身壓力云圖
5 結論
針對高速車輛側風穩定性問題,本文中建立了CFD-MBD雙向耦合控制平臺,設計了一種基于滑模理論的側風穩定性控制系統,通過對階躍側風下高速車輛的雙向耦合控制分析,得到如下結論。
(1)在階躍側風中,DYC 車輛橫擺角基本為0,未受控制車輛的橫擺角最大可達5.7°。在此側風穩定控制系統下,高速車輛的橫擺角能得到有效控制。在階躍側風發生后,DYC 車輛橫擺角速度出現較小抖振,但抖振幅度較小。DYC 車輛相對未受控制車輛在整個側風過程中最大橫擺角速度減小46%。
(2)在階躍側風中,DYC車輛的最大側向位移為0.41 m,未受控制車輛的最大側向位移為4.0 m。在此側風穩定控制系統下,高速車輛的側向位移得到了有效控制。
(3)通過CFD-MBD 雙向耦合控制平臺,可以捕捉到車輛不同行駛狀態下的氣動力與力矩變化,以及不同時刻車身周圍流場的瞬態特性。在階躍側風作用2 s時間內,DYC車輛相對未受控制車輛產生較大氣動橫擺力矩。階躍側風消失后,未受控制車輛仍具有較小反向氣動橫擺力矩。在側風風速快速增加到16 m/s 時,DYC 車輛和未受控制車輛的氣動側向力都出現峰值,側風風速快速減小到0 時,DYC 車輛和未受控制車輛氣動側向力都出現反向峰值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19